
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 12-21.doi: 10.12382/bgxb.2023.0962
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
XU Peng1,2,3, XING Boyang1,2,3, LIU Yufei1,2,3, LI Yongyao1,2,3,4, ZENG Yi1,2, ZHENG Dongdong1,2,4,*( )
)
Received:2023-09-25
Online:2024-01-10
Contact:
ZHENG Dongdong
CLC Number:
XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique[J]. Acta Armamentarii, 2023, 44(S2): 12-21.
Add to citation manager EndNote|Ris|BibTeX
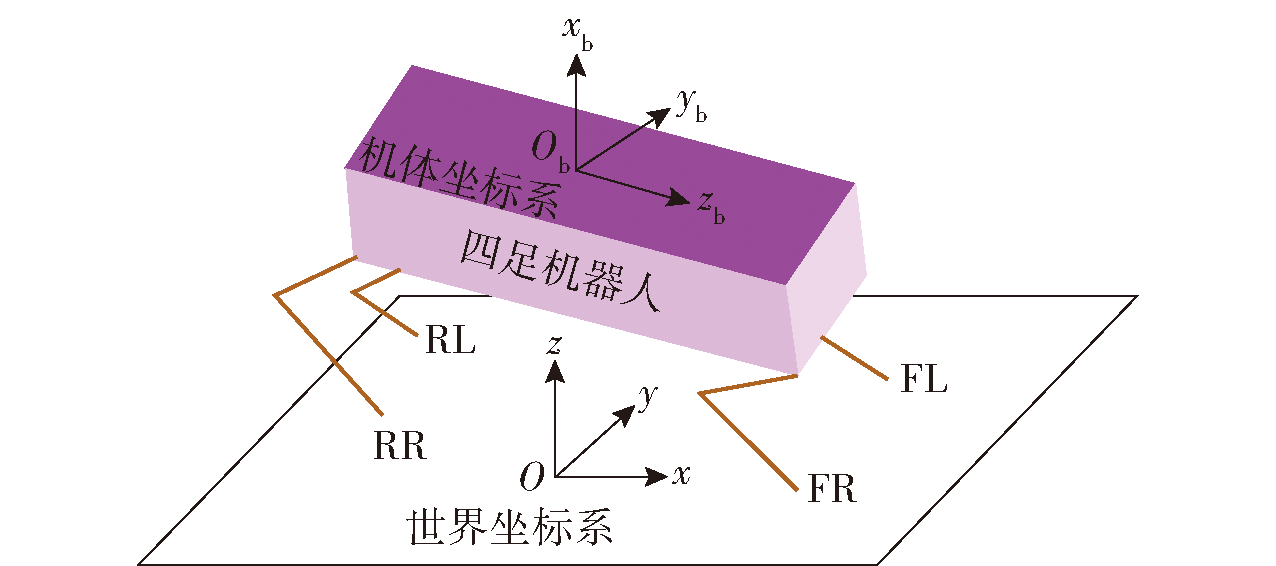
Fig.1 A simplified quadruped robot

Fig.2 System control framework
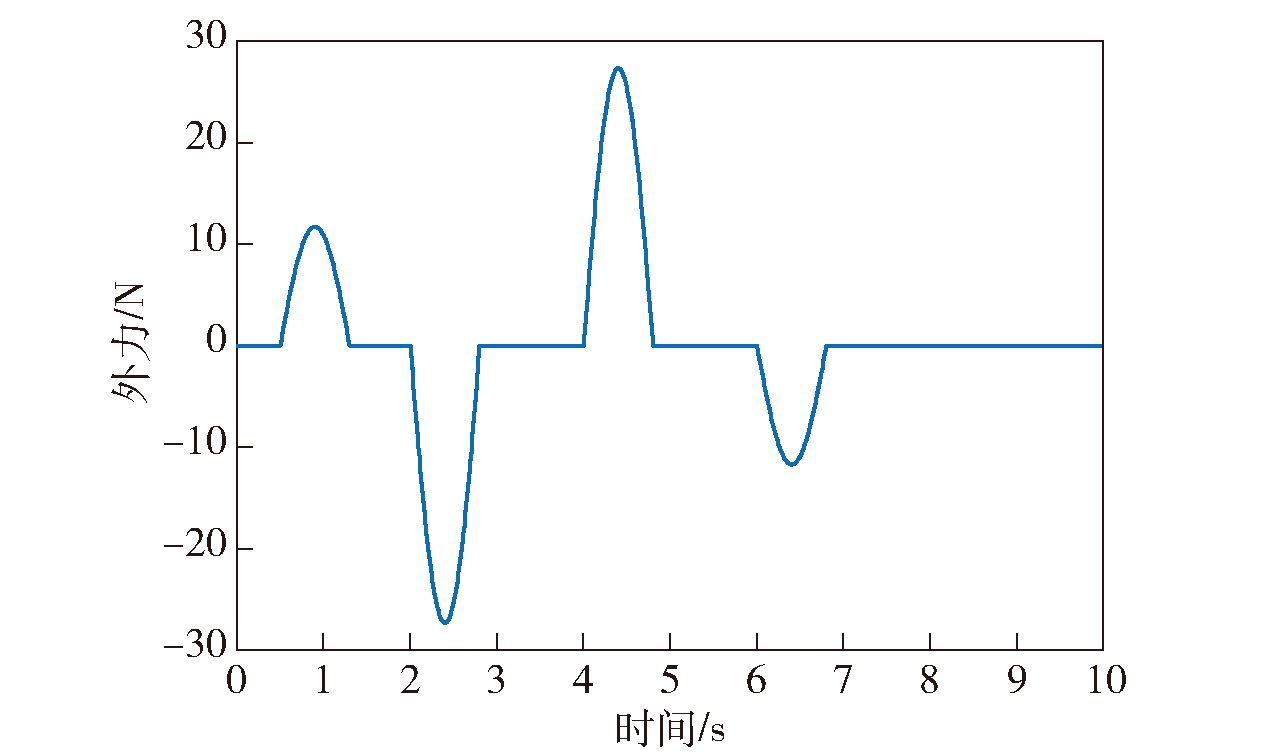
Fig.3 External force applied to the robot
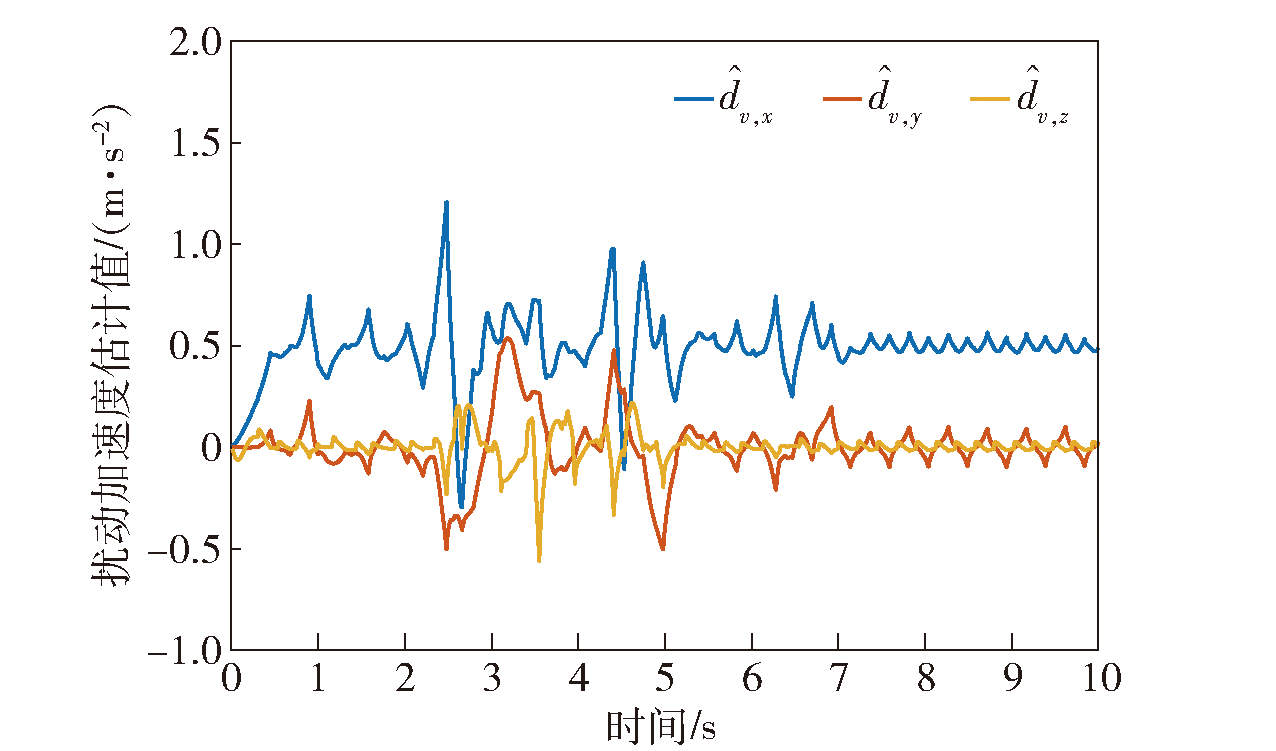
Fig.4 Estimated results of the acceleration disturbances
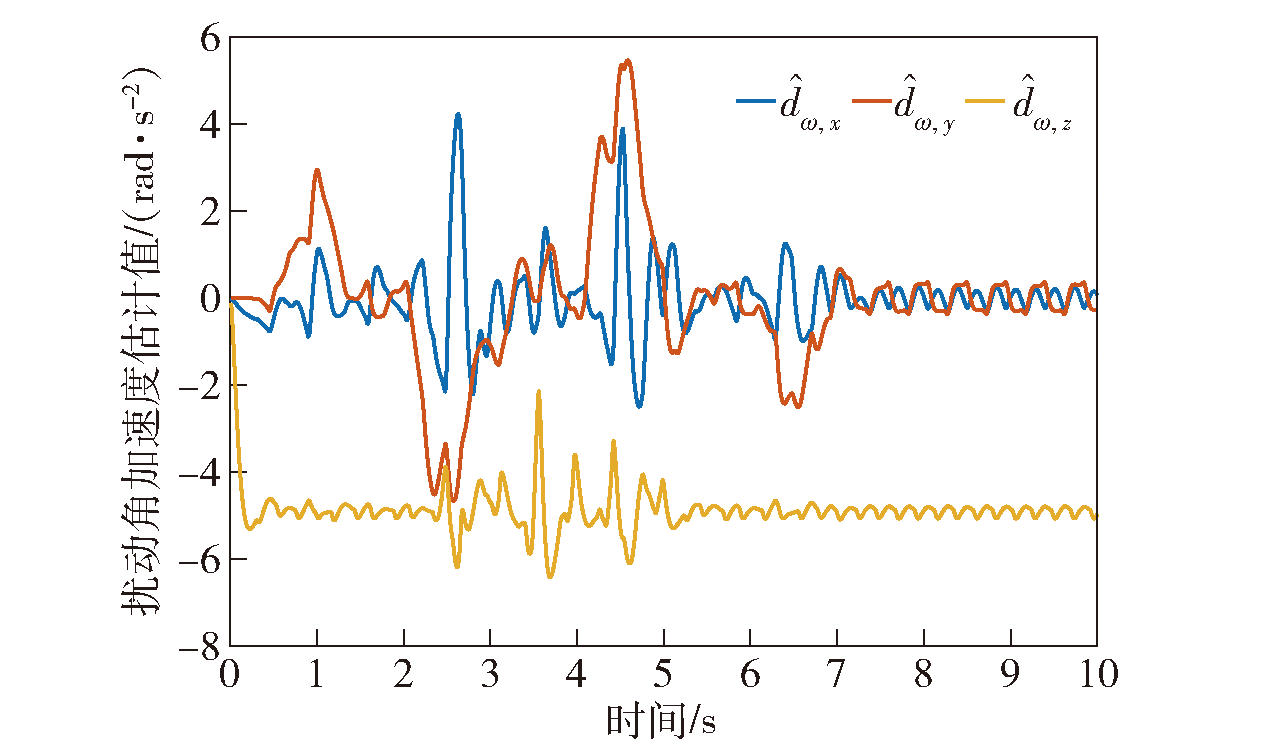
Fig.5 Estimated results of the angular acceleration disturbances
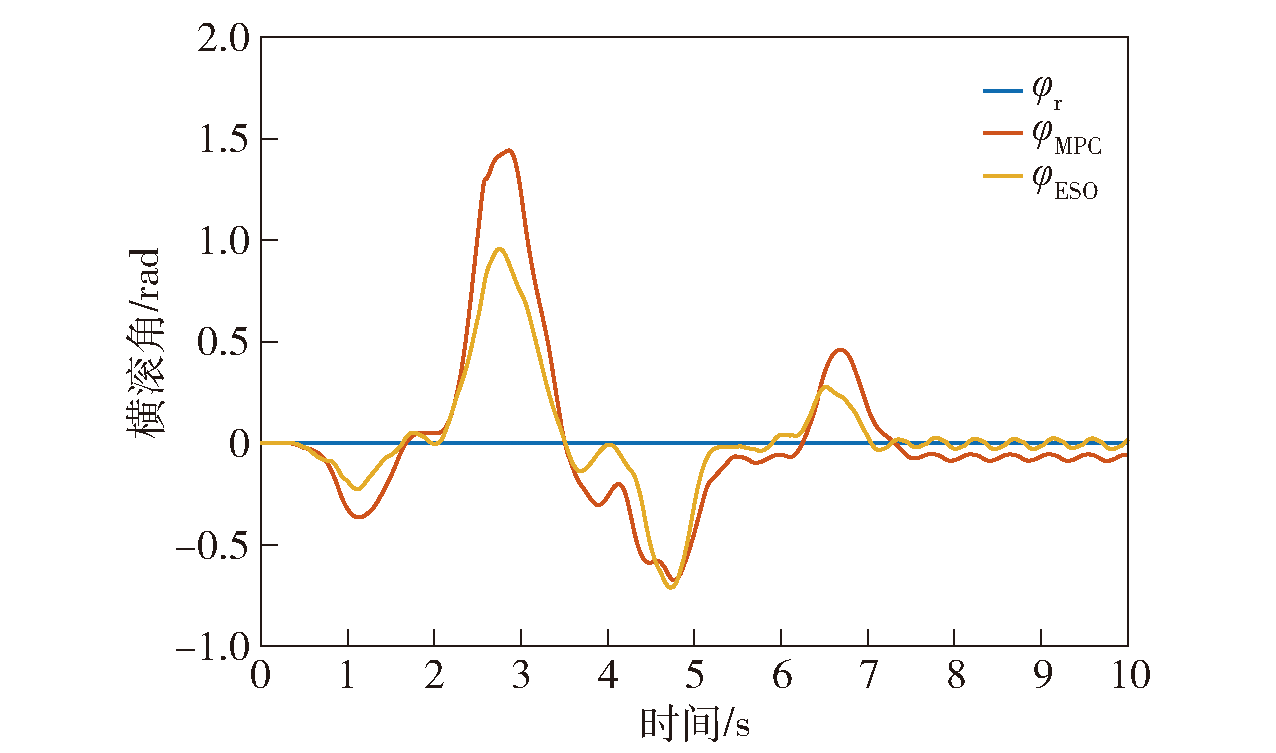
Fig.6 Roll angle of robot
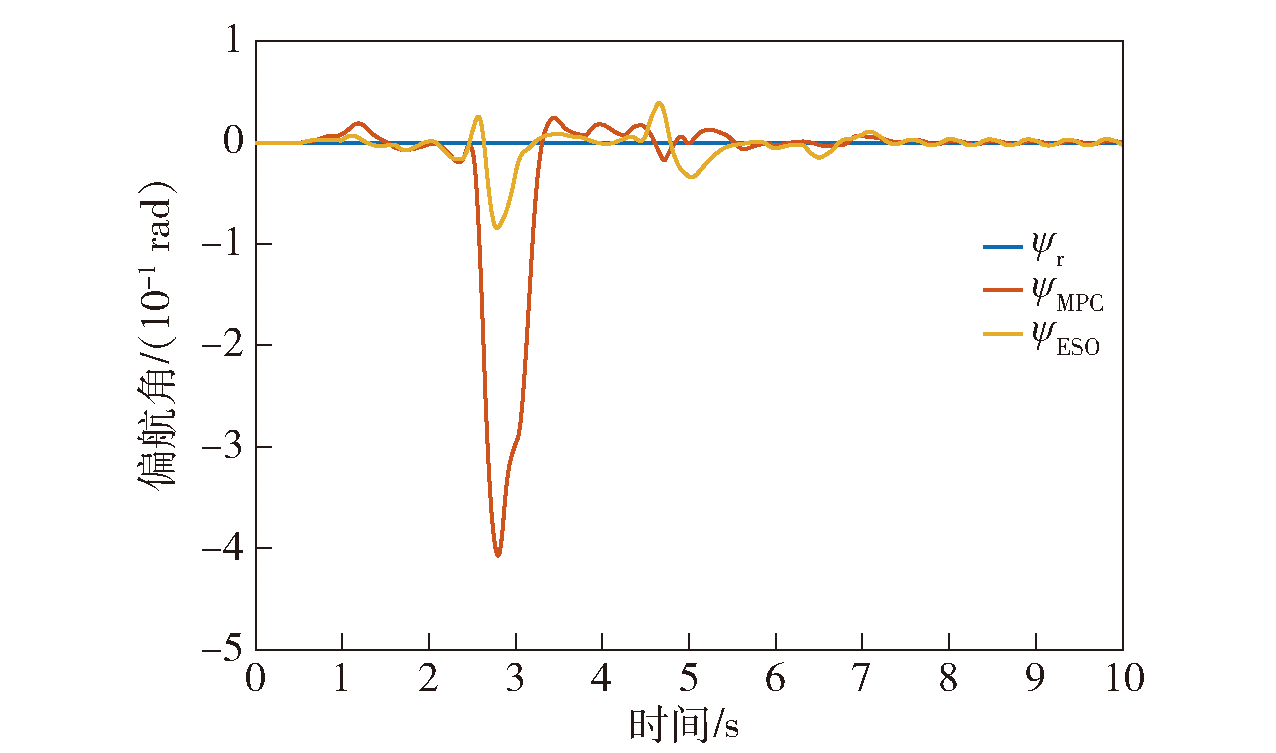
Fig.7 Yaw angle of robot
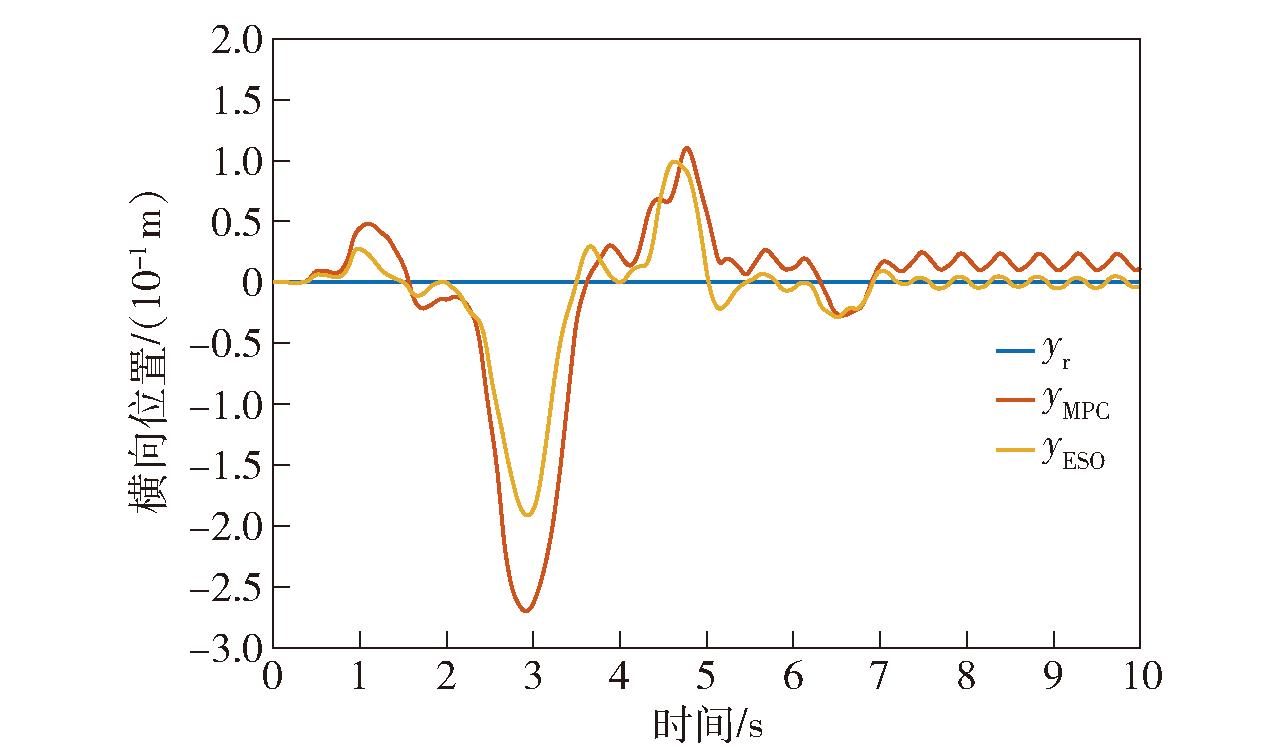
Fig.8 Lateral position of robot in the world frame
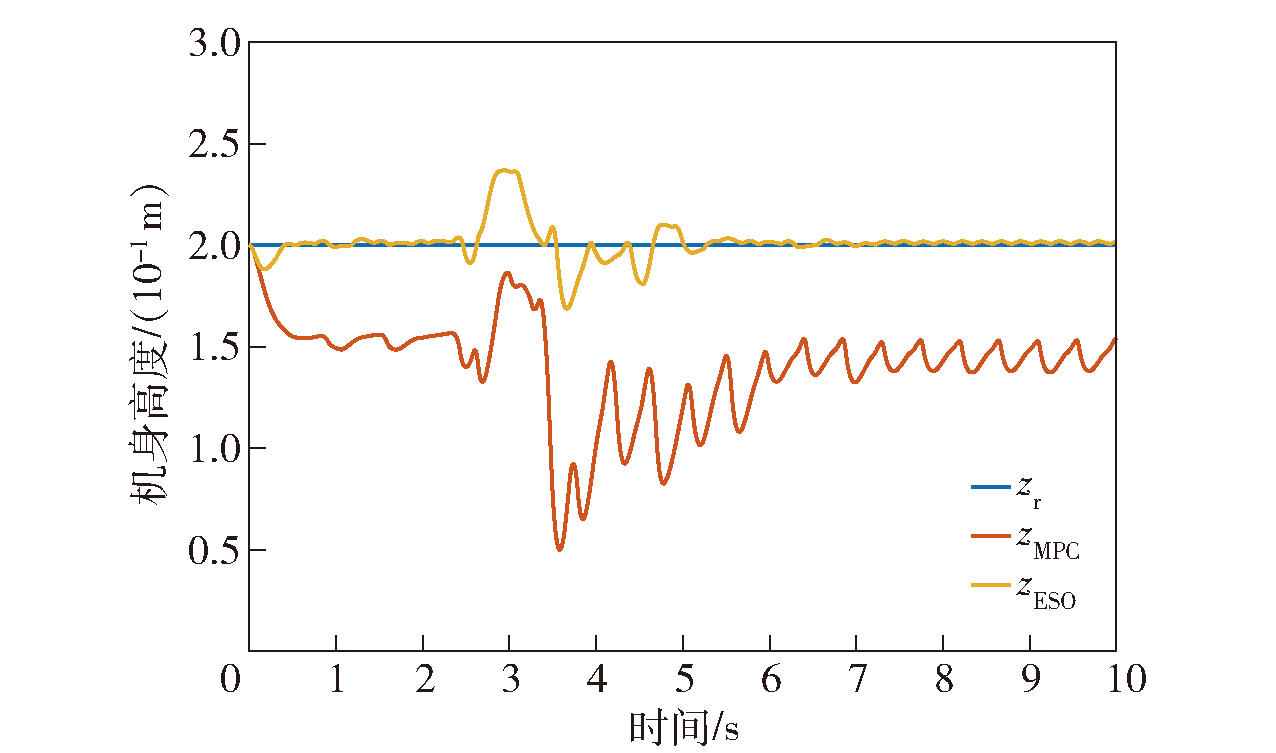
Fig.9 Height of robotbody
| [1] |
doi: 10.1016/j.asej.2020.11.005 URL |
| [2] |
doi: 10.1109/LRA.2017.2723931 URL |
| [3] |
doi: 10.1109/TRO.2023.3240622 URL |
| [4] |
doi: 10.1115/1.4049555 URL |
| [5] |
doi: 10.1109/LRA.2018.2857511 URL |
| [6] |
doi: 10.5772/63893 URL |
| [7] |
doi: 10.1038/s41598-022-09937-9 pmid: 35393501 |
| [8] |
doi: 10.1109/JAS.2017.7510790 URL |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
王艳琴, 许威, 周川, 等. 基于质心调整的四足机器人转弯步态规划[J]. 控制工程, 2021, 28(11): 2280-2285.
|
|
|
|
| [15] |
doi: 10.1109/Access.6287639 URL |
| [16] |
谭永营, 晁智强, 金毅, 等. 基于虚拟元件的负载型四足步行平台静步态行走控制[J]. 兵工学报, 2019, 40(12): 2570-2579.
doi: 10.3969/j.issn.1000-1093.2019.12.023 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.023 |
|
| [17] |
|
| [18] |
|
| [19] |
doi: 10.1002/rob.v40.6 URL |
| [20] |
doi: 10.1016/j.robot.2023.104411 URL |
| [21] |
|
| [22] |
doi: 10.1109/LSP.2016. URL |
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1109/TRO.2020.3046415 URL |
| [26] |
doi: 10.1016/j.isatra.2022.03.009 URL |
| [27] |
|
| [28] |
朱晓璐, 万锦晓, 许威, 等. 侧向推搡下的四足机器人复合抗扰控制策略[J]. 信息与控制, 2021, 50(1): 119-128.
doi: 10.13976/j.cnki.xk.2020.0158 |
|
doi: 10.13976/j.cnki.xk.2020.0158 |
|
| [29] |
doi: 10.1007/s40998-019-00283-7 |
| [30] |
|
| [31] |
|
| [32] |
doi: 10.1016/j.mechmachtheory.2021.104412 URL |
| [33] |
|
| [34] |
doi: 10.1109/TIE.2021.3095811 URL |
| [35] |
|
| [36] |
|
| [37] |
|
| [1] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [2] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [3] | LIU Siyu, LIAO Junbei, LEI Fei, WANG Zhirui, YAN Tong, DANG Ruina, GUO Zhao. Design and Optimization of a Parallel Elastic Actuator Leg for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 71-83. |
| [4] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [5] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [6] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [7] | GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load [J]. Acta Armamentarii, 2023, 44(3): 736-747. |
| [8] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [9] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [10] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [11] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [12] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [13] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [14] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [15] | DU Ming-fang, WANG Jun-zheng, LI Duo-yang, HE Yu-dong. Ground Robot Multi-scale Road Perception Based on Semantic Tree MRF Model [J]. Acta Armamentarii, 2016, 37(3): 512-517. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||