
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 1-11.doi: 10.12382/bgxb.2023.0854
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LI Zhaodong1,2, ZHAO Xijun1,2, YANG Tingting1,2,*( ), QI Xiaolong3, ZHOU Changyi1,2, ZHANG Liming3
), QI Xiaolong3, ZHOU Changyi1,2, ZHANG Liming3
Received:2023-09-02
Online:2024-01-10
Contact:
YANG Tingting
CLC Number:
LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments[J]. Acta Armamentarii, 2023, 44(S2): 1-11.
Add to citation manager EndNote|Ris|BibTeX
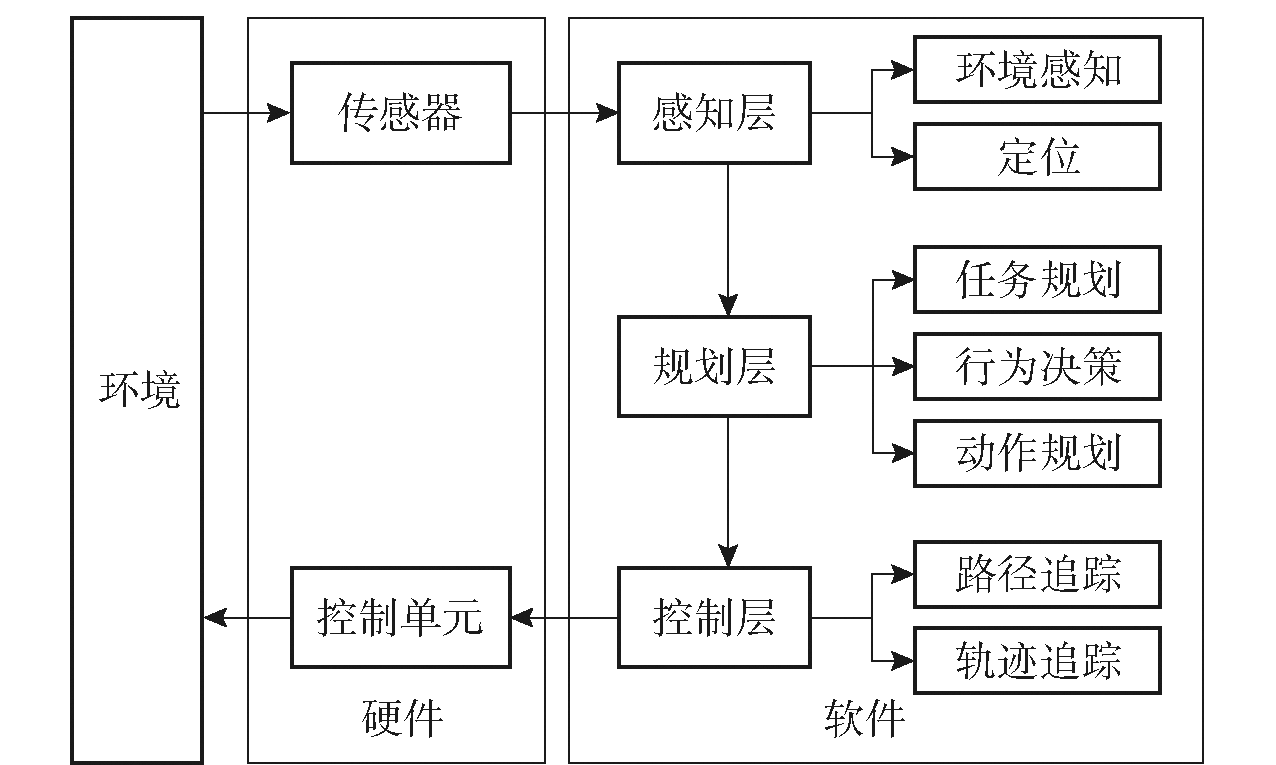
Fig.1 Layered architecture of autonomous navigation system
| 地图种类 | 服务对象 | 精度 | 要素和属性 |
|---|---|---|---|
| 高精地图 | 无人车辆 | 亚米级 | 详细的车道模型(曲率、坡度、航向、限高、限重、限宽)、道路部件、定位地物等 |
| 传统电子地图 | 人 | 米级 | 道路、兴趣点 |
Table 1 The difference between high-definition map and traditional electronic map
| 地图种类 | 服务对象 | 精度 | 要素和属性 |
|---|---|---|---|
| 高精地图 | 无人车辆 | 亚米级 | 详细的车道模型(曲率、坡度、航向、限高、限重、限宽)、道路部件、定位地物等 |
| 传统电子地图 | 人 | 米级 | 道路、兴趣点 |

Fig.2 Road structure and intersection representation of OpenDRIVE
| 数据来源 | 优势 | 劣势 |
|---|---|---|
| 众包采集 | 高效率、高实时性、高适应性 | 成本高、数据后处理代价较大 |
| 开源数据集 | 数据质量高、无需后处理 | 数据实时性差、针对性较差 |
| MMS | 数据可定制、成本较低、可针对特殊场景 | 地图覆盖范围小、数据实时性较差、数据采集耗时较多 |
Table 2 Advantages and disadvantages of data collection methods
| 数据来源 | 优势 | 劣势 |
|---|---|---|
| 众包采集 | 高效率、高实时性、高适应性 | 成本高、数据后处理代价较大 |
| 开源数据集 | 数据质量高、无需后处理 | 数据实时性差、针对性较差 |
| MMS | 数据可定制、成本较低、可针对特殊场景 | 地图覆盖范围小、数据实时性较差、数据采集耗时较多 |

Fig.3 Schematic diagram of 3D point cloud map
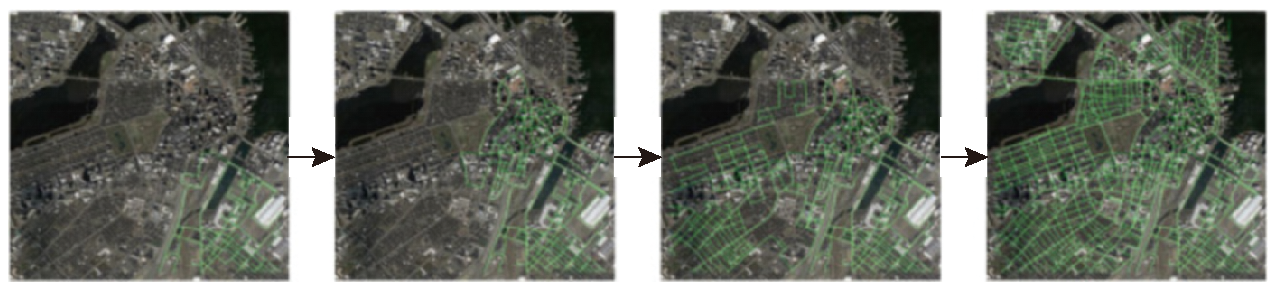
Fig.4 Generating road networks based on iterative growth(Green represents the road network structure)[37]

Fig.5 Data fusion of space-air-ground
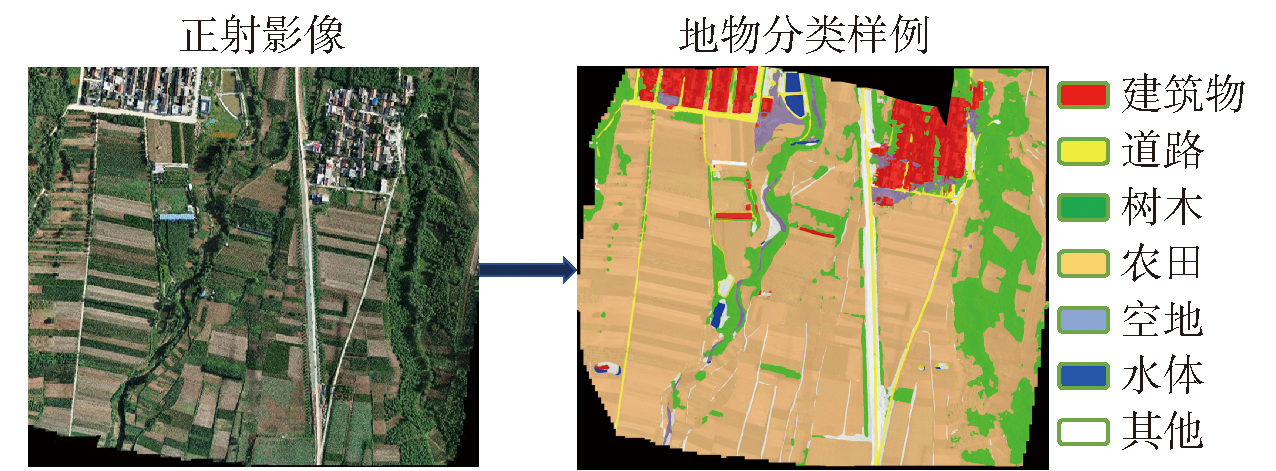
Fig.6 Effect of map feature extraction and classification
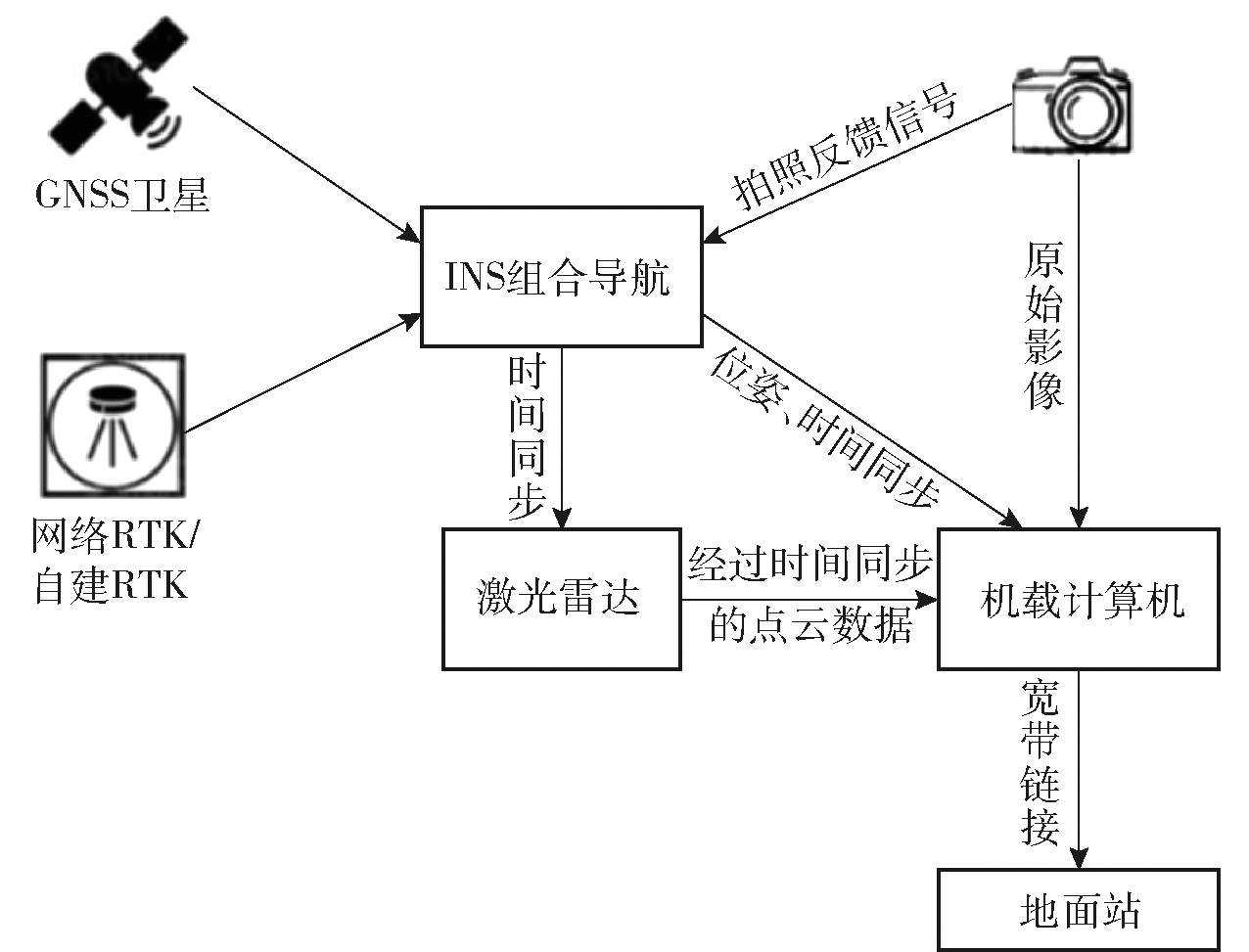
Fig.7 Framework for real-time point clouds

Fig.8 Effect of UAV 3D true color point cloud

Fig.9 Autonomous navigation system for unmanned vehicles
| [1] |
王涛, 陈艳丽, 贾双成. 简述高精地图的特点[J]. 软件, 2018, 39(9):183-187.
|
|
|
|
| [2] |
王彬. 基于多传感器融合的高精度地图生成方法研究[D]. 重庆: 重庆大学, 2022:1-6.
|
|
|
|
| [3] |
doi: 10.1109/TIV.2022.3223131 URL |
| [4] |
doi: 10.1109/TITS.2015.2389237 URL |
| [5] |
doi: 10.1109/TITS.2013.2291395 URL |
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
王淞. 特定场景轻量级高精地图设计[D]. 重庆: 重庆邮电大学, 2022.
|
|
|
|
| [10] |
吕钊凤, 李峥嵘. 无人驾驶,地图先行——盘点中国19家高精度地图厂商[J]. 智能网联汽车, 2019(4):22-28.
|
|
|
|
| [11] |
黄琛, 尹彤, 王建明. 高精度地图标准化建设探讨[J]. 中国标准化, 2021(21):89-93.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
ISO/TC204. Intelligent transport systems—geographic data files(GDF)—GDF 5.1-part 2: map data used in automated driving systems, cooperative ITS, and multimodal transport: ISO 20524-2:2020[S]. Warrendale, PA, US: International Standards Organization, 2020.
|
| [16] |
ISO/TC204. Intelligent transport systems—geographic data files(GDF)—GDF5.0: ISO 14825:2011[S]. Warrendale, PA, US: International Standards Organization, 2011.
|
| [17] |
|
| [18] |
周勇, 刘尚魁. 构建基于 Appollo 的高精度地图解决方案[J]. 电子技术与软件工程, 2018(21):139.
|
|
|
|
| [19] |
张晓华. 高精度地图为自主泊车保驾护航[C]// 卫星导航定位与北斗系统应用 2019——北斗服务全球融合创新应用. 北京: 测绘出版社, 2019:130-133.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
HERE, 2021. Map data | static map API[Online]. Available: https://www.here.com/platform/map-data.
|
| [23] |
doi: 10.1177/0278364913491297 URL |
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
doi: 10.1109/LRA.2021.3064227 URL |
| [29] |
doi: 10.1109/TRO.2022.3141876 URL |
| [30] |
|
| [31] |
doi: 10.3390/rs14030613 URL |
| [32] |
|
| [33] |
|
| [34] |
doi: 10.1016/j.sigpro.2019.03.019 URL |
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
仲跻炜, 陈大吾, 朱峰. 基于北斗高精度定位和车道级高精度地图的车辆监控平台设计与实现[J]. 全球定位系统, 2015, 40(4):50-55.
|
|
|
|
| [44] |
李亮. 基于点云匹配的智能车定位方法研究[D]. 上海: 上海交通大学, 2018:1-10.
|
|
|
|
| [45] |
王一文, 钱闯, 唐健, 等. 预建高精度地图的封闭区域UGV 自动驾驶导航定位[J]. 测绘通报, 2020(1):21-25.
doi: 10.13474/j.cnki.11-2246.2020.0005 |
|
|
|
| [46] |
周涛. 单目视觉下车道线检测与跟踪算法的研究与测试[D]. 武汉: 华中师范大学, 2016:1-5.
|
|
|
|
| [47] |
胡钊政, 孙莹妹, 李祎承. 路面路标高精度地图构建与多尺度车辆定位[J]. 哈尔滨工业大学学报, 2019, 51(9):149-156.
|
|
|
|
| [48] |
祖似杰, 张攀, 罗跃军. 基于车道驾驶态势的拓扑构建与路径规划[J]. 地理空间信息, 2018, 16(5):53-56.
|
|
|
|
| [49] |
訾烨, 任明武. 一种基于高精度地图匹配误差的路径规划方法[J]. 计算机与数字工程, 2021, 49(11):2248-2253.
|
|
|
|
| [50] |
陈根. 移动测量技术在高精度地图数据生产方面的应用分析[J]. 城市建设理论研究(电子版), 2018(5):104-105.
|
|
|
|
| [51] |
曹波. 基于多传感器的高精度地图生成技术研究[J]. 内燃机与配件, 2019(16):133-135.
|
|
|
|
| [52] |
|
| [53] |
doi: 10.3390/rs14236033 URL |
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
doi: 10.3390/wevj12040227 URL |
| [61] |
doi: 10.3390/s22166198 URL |
| [1] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [2] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [3] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [4] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [5] | GUAN Haijie, WANG Boyang, WANG Xurui, LIU Hai’ou, CHEN Huiyan. A Review on the Development of Military Unmanned Ground System with Mission Payload [J]. Acta Armamentarii, 2023, 44(11): 3333-3344. |
| [6] | SUN Yang, CHEN Hui-yan. Research on Test and Evaluation of Unmanned Ground Vehicles [J]. Acta Armamentarii, 2015, 36(6): 978-986. |
| [7] | CHEN Hui-yan, ZHANG Yu. An Overview of Research on Military Unmanned Ground Vehicles [J]. Acta Armamentarii, 2014, 35(10): 1696-1706. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||