
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 298-306.doi: 10.12382/bgxb.2022.0089
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
ZHOU Qiu1,2, ZHOU Yue1,*( ), SUN Hongming2,3, GUO Wei2,3, WU Kai1,2, LAN Yanjun2
), SUN Hongming2,3, GUO Wei2,3, WU Kai1,2, LAN Yanjun2
Received:2022-02-16
Online:2022-06-08
Contact:
ZHOU Yue
CLC Number:
ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle[J]. Acta Armamentarii, 2023, 44(1): 298-306.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Schematic diagram of the dual motor drive

Fig.2 Diagram of DSLV differential motion
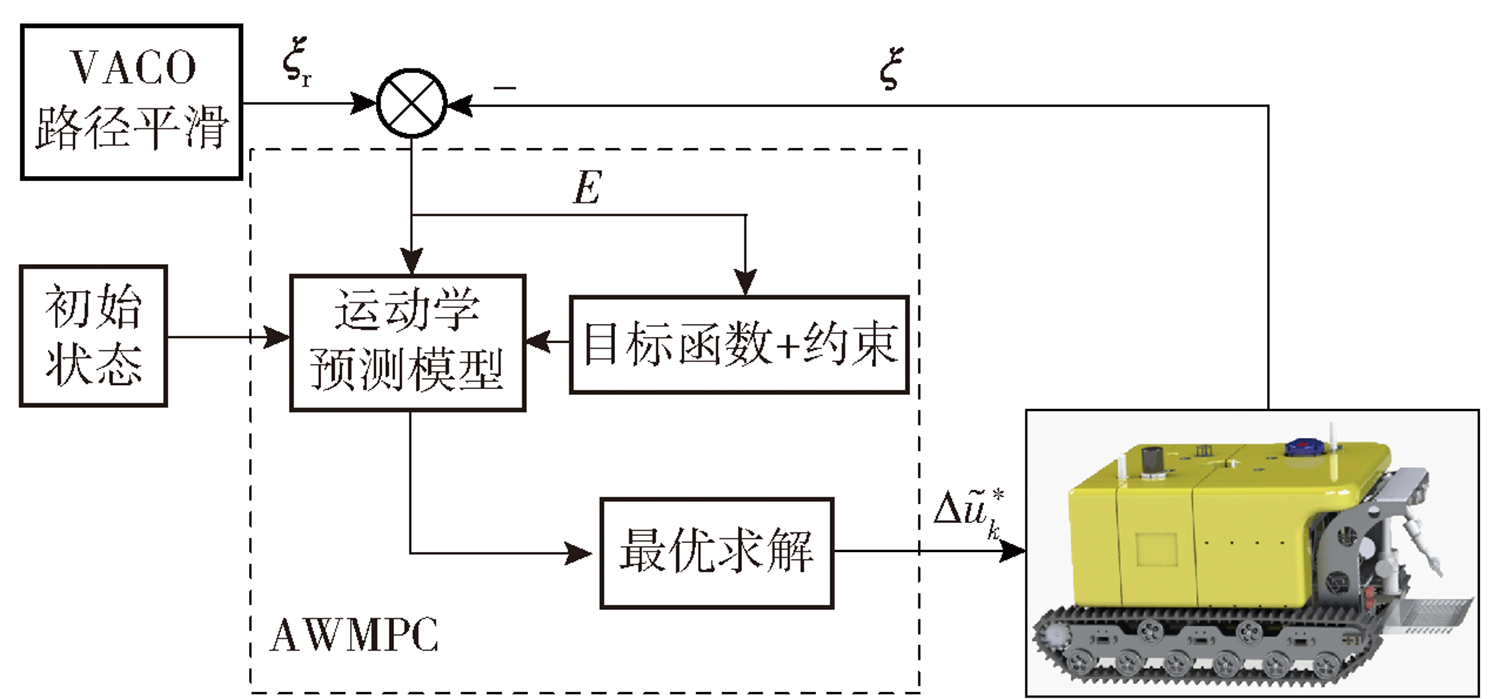
Fig.3 Overall design framework of VACO-AWMPC
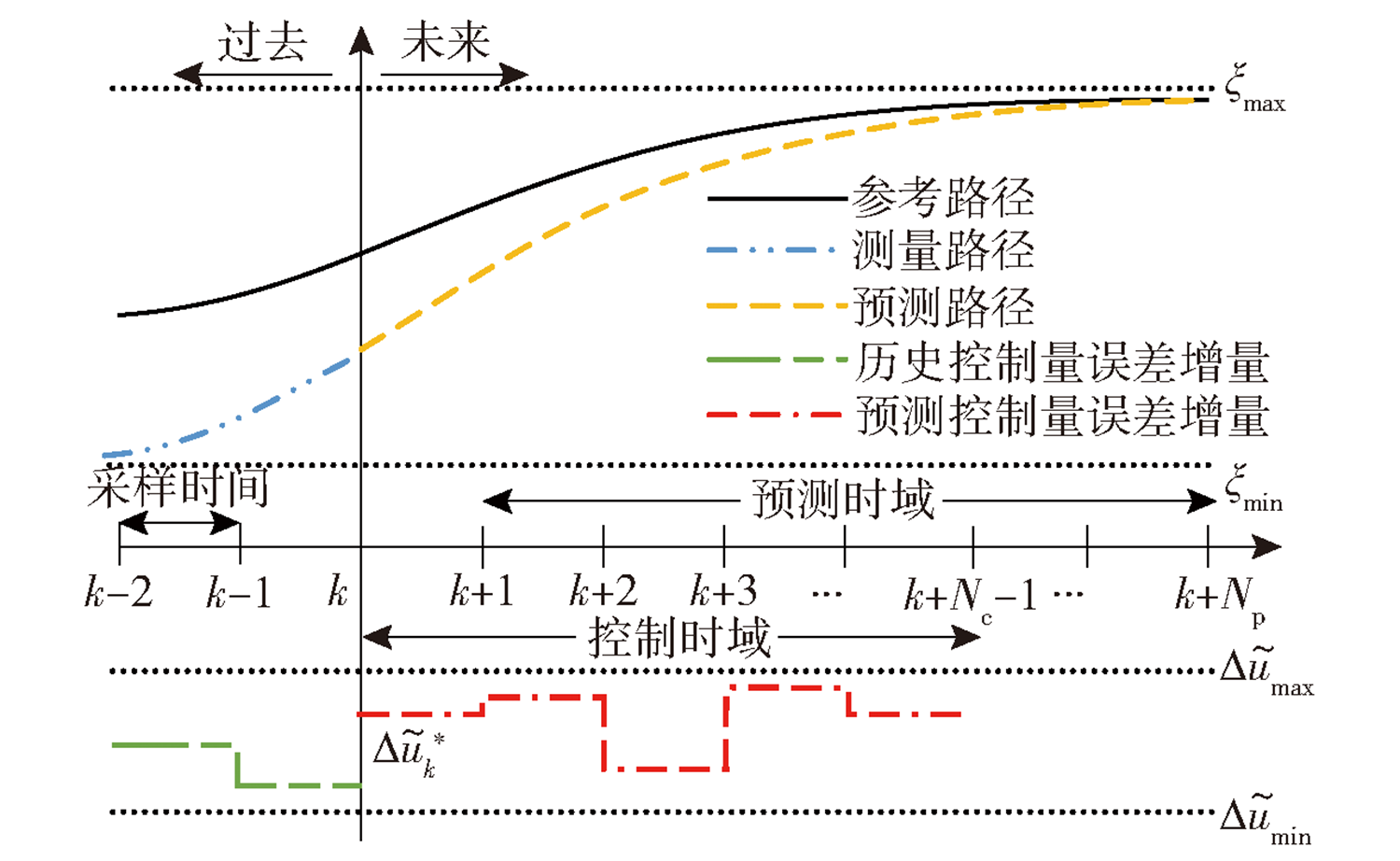
Fig.4 Schematic diagram of MPC path tracking

Fig.5 Comparison of path planning results
| 算法及减少率 | 平均路径长度/m | 平均收敛迭代次数 |
|---|---|---|
| ACO | 46.70 | 99 |
| VACO | 44.53 | 43 |
| 减少率/% | 4.60 | 56.57 |
Table 1 Comparison of mean values of simulation results
| 算法及减少率 | 平均路径长度/m | 平均收敛迭代次数 |
|---|---|---|
| ACO | 46.70 | 99 |
| VACO | 44.53 | 43 |
| 减少率/% | 4.60 | 56.57 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| d/m | 1.37 | [1.5,0.8] | |
| D/m | 1.61 | Δ | [-0.01,-0.05] |
| rd/m | 0.1 | Δ | [0.01,0.05] |
| Nc | 5 | ξmax | [30,30,∞] |
| Np | 10 | ξmin | [0,0,-∞] |
| Q | diag(6,6,0.1) | L/m | 0.5 |
| T/s | 0.23 | a1 | 40 |
| vr/(m·s-1) | 0.35 | b1 | 7.41 |
| [-1.5,-0.8] | s1、sr | 0.13 |
Table 2 Parameters and configuration of the predictive model
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| d/m | 1.37 | [1.5,0.8] | |
| D/m | 1.61 | Δ | [-0.01,-0.05] |
| rd/m | 0.1 | Δ | [0.01,0.05] |
| Nc | 5 | ξmax | [30,30,∞] |
| Np | 10 | ξmin | [0,0,-∞] |
| Q | diag(6,6,0.1) | L/m | 0.5 |
| T/s | 0.23 | a1 | 40 |
| vr/(m·s-1) | 0.35 | b1 | 7.41 |
| [-1.5,-0.8] | s1、sr | 0.13 |

Fig.6 Comparison of path tracking results

Fig.7 Comparison of state quantity tracking control effects

Fig.8 Comparison of state quantity error change
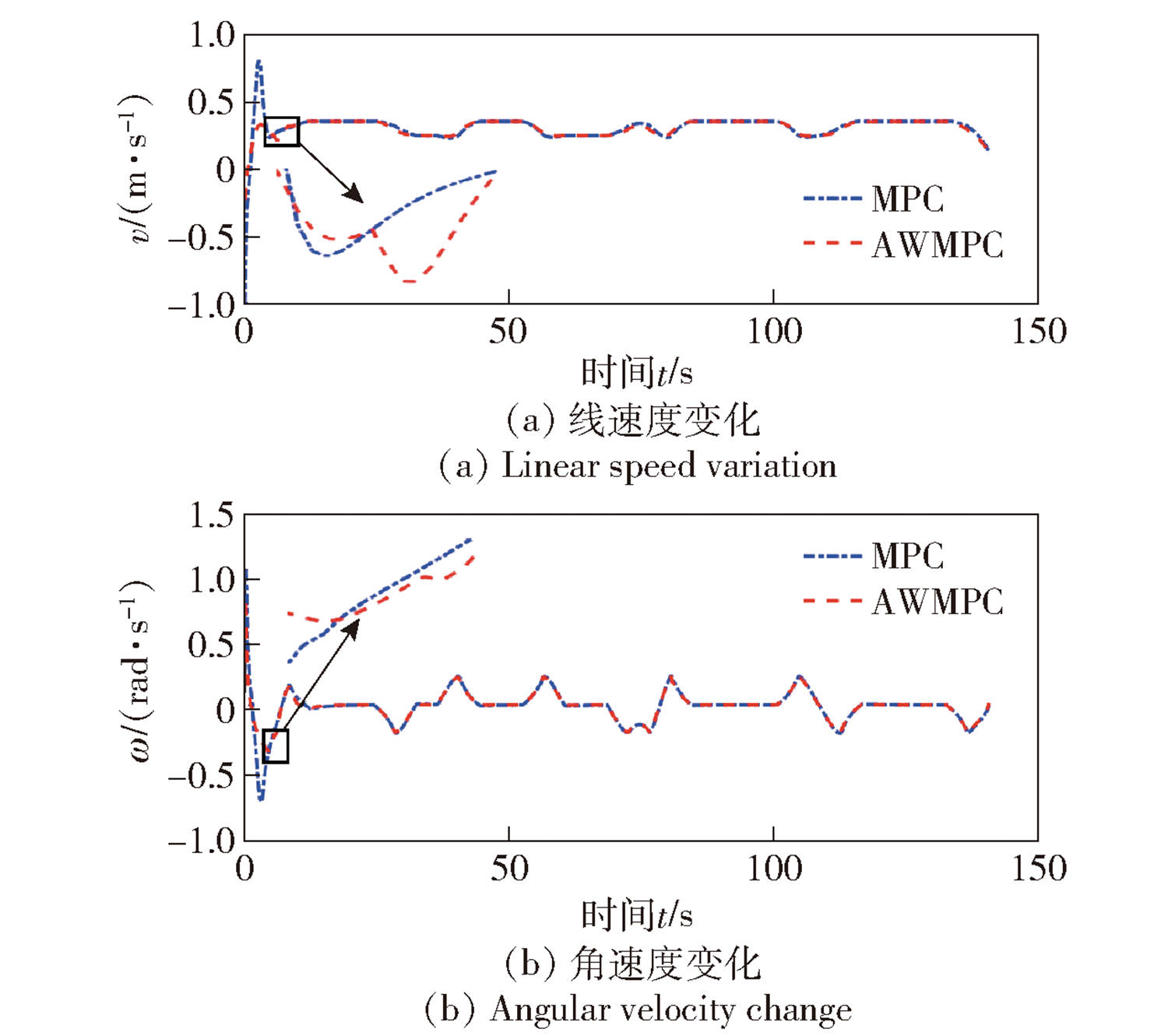
Fig.9 Comparison of control quantity change effect
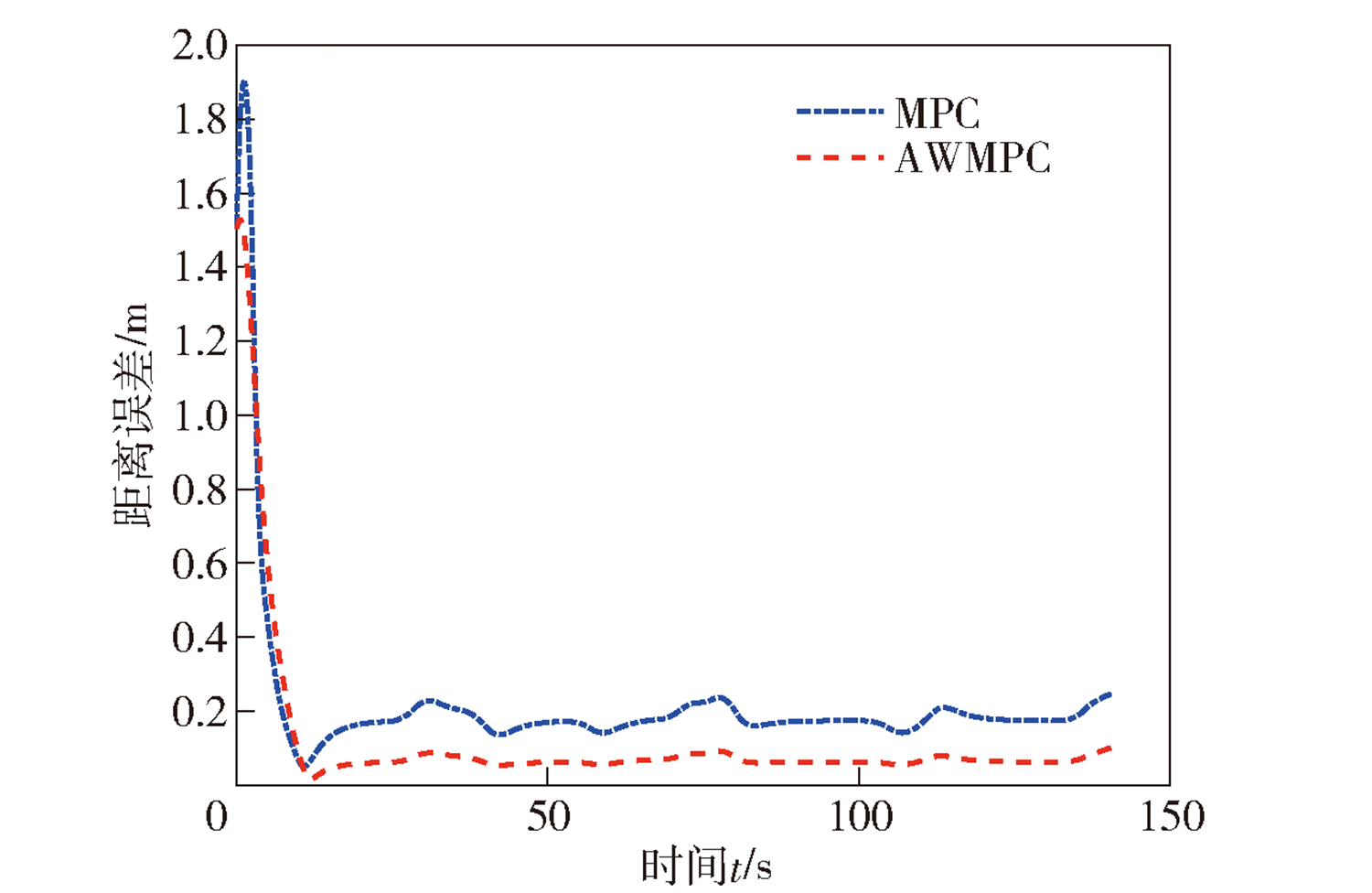
Fig.10 Comparison of tracking distance error
| [1] |
张奇峰, 张运修, 张艾群. 深海小型爬行机器人研究现状[J]. 机器人, 2019, 41(2):250-264.
doi: 10.13973/j.cnki.robot.180231 |
|
|
|
| [2] |
孙洪鸣, 郭威, 周悦, 等. 全海深着陆车机构设计及其潜浮运动性能分析[J]. 机器人, 2020, 42(2):207-214.
doi: 10.13973/j.cnki.robot.190375 |
|
|
|
| [3] |
白国星, 孟宇, 刘立, 等. 基于可变预测时域及速度的车辆路径跟踪控制[J]. 中国机械工程, 2020, 31(11): 1277-1284.
|
|
|
|
| [4] |
doi: 10.1080/00423114.2017.1280173 URL |
| [5] |
doi: 10.1049/iet-its.2018.5095 URL |
| [6] |
张志达, 郑玲, 张紫微, 等. 基于自适应模型预测的智能汽车横向轨迹跟踪控制[J]. 中国公路学报, 2022, 35(7):305-316.
doi: 10.19721/j.cnki.1001-7372.2022.07.026 |
|
|
|
| [7] |
|
| [8] |
姚绪梁, 王晓伟. 基于MPC导引律的AUV路径跟踪和避障控制[J]. 北京航空航天大学学报, 2020, 46(6):1053-1062.
|
|
|
|
| [9] |
徐兴, 汤赵, 王峰, 等. 基于变权重系数的分布式驱动无人车轨迹跟踪[J]. 中国公路学报, 2019, 32(12): 36-45.
doi: 10.19721/j.cnki.1001-7372.2019.12.004 |
|
|
|
| [10] |
郭威, 孙洪鸣, 徐高飞, 等. 全海深着陆车着底冲击特性与集中应力结构改进[J]. 中国机械工程, 2021, 32 (7):867-874.
|
|
|
|
| [11] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
|
|
| [12] |
樊娟娟. 基于预测控制的并联式混合动力汽车能量管理策略研究[D]. 济南: 山东大学, 2012.
|
|
|
|
| [13] |
魏立新, 张钰锟, 孙浩, 等. 基于改进蚁群和DWA算法的机器人动态路径规划[J]. 控制与决策, 2022, 37(9):2211-2216.
|
|
|
|
| [14] |
|
| [15] |
夏光, 李嘉诚, 唐希雯, 等. 平衡重式叉车防侧翻模型预测控制研究[J]. 中国机械工程, 2021, 32(8): 987-996.
|
|
|
|
| [16] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3):456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
|
|
| [17] |
蔡英凤, 李健, 孙晓强, 等. 智能汽车路径跟踪混合控制策略研究[J]. 中国机械工程, 2020, 31(3): 289-298.
|
|
|
|
| [18] |
孙涛, 夏维, 李道飞. 基于模型预测控制的协同式自适应巡航控制系统[J]. 中国机械工程, 2017, 28(4): 486-491.
|
|
|
|
| [19] |
张亮修, 吴光强, 郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报(自然科学版), 2016, 44(10):1595-1603.
|
|
|
|
| [20] |
王浩杰. 自动泊车系统路径规划与跟踪算法研究[D]. 大连: 大连理工大学, 2021.
|
|
|
|
| [21] |
韩庆珏, 刘少军. 深海履带车的路径跟踪控制算法[J]. 中南大学学报(自然科学版), 2015, 46(2):472-478.
|
|
|
|
| [22] |
张玮, 马焱, 赵捍东, 等. 基于改进烟花-蚁群混合算法的智能移动体避障路径规划[J]. 控制与决策, 2019, 34(2):335-343.
|
|
|
|
| [23] |
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||