
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3465-3477.doi: 10.12382/bgxb.2022.0815
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin*( )
)
Received:2022-09-07
Online:2023-05-12
Contact:
XU Xin
CLC Number:
JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning[J]. Acta Armamentarii, 2023, 44(11): 3465-3477.
Add to citation manager EndNote|Ris|BibTeX
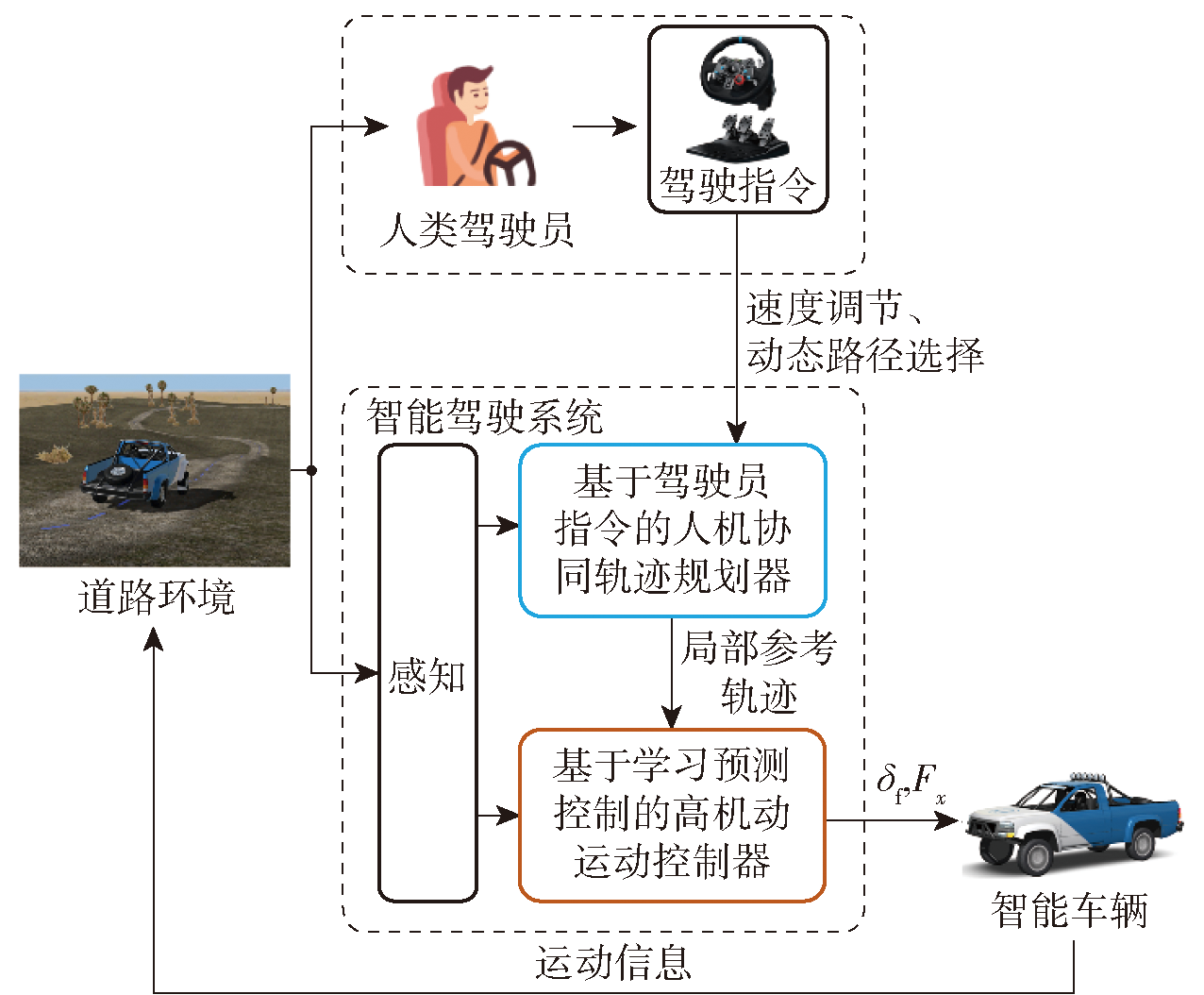
Fig.1 Framework of human-machine collaborative control system for high maneuvering motion of intelligent vehicle
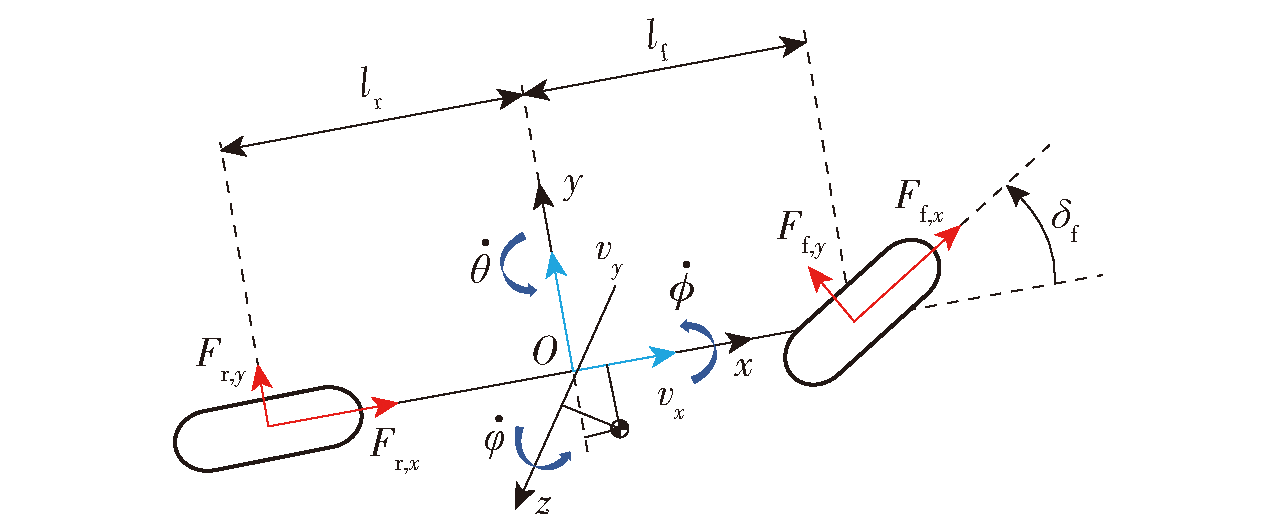
Fig.2 Vehicle dynamics model considering yaw, pitch and roll
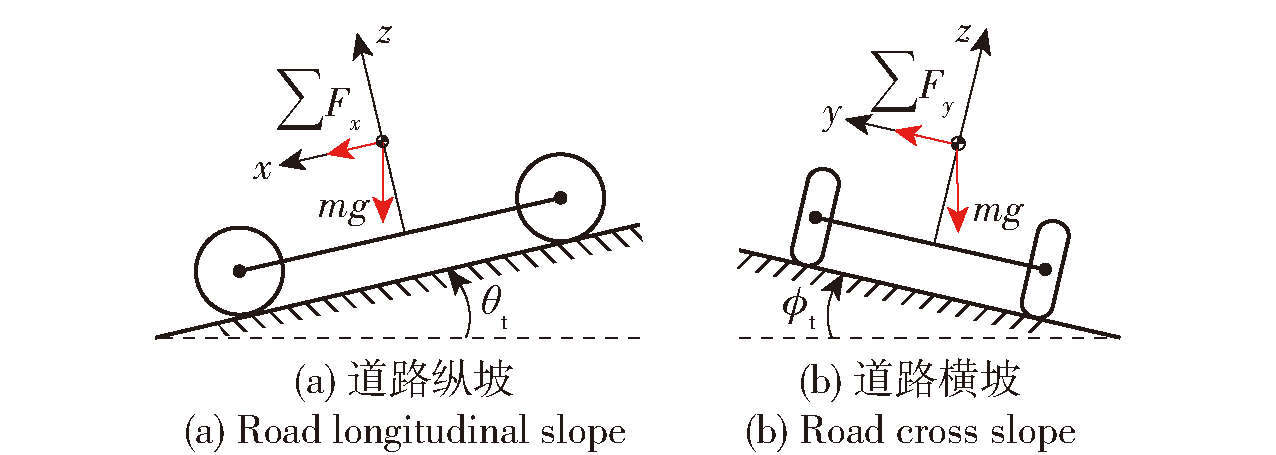
Fig.3 Influence of road grade on vehicle dynamics model
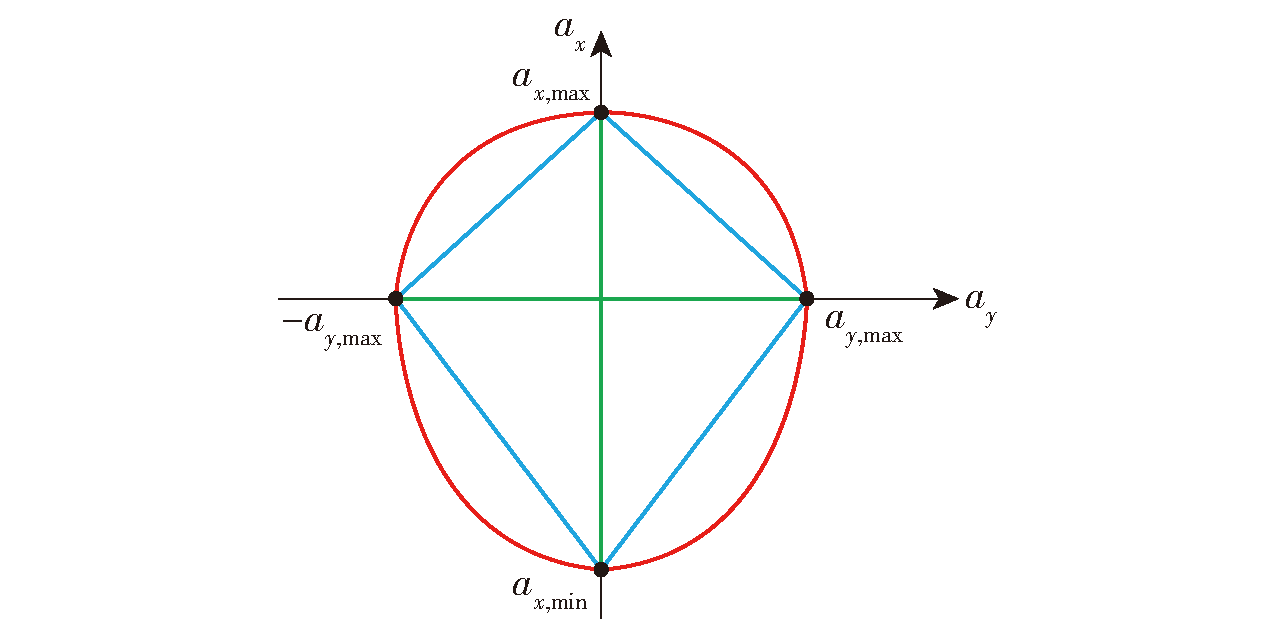
Fig.4 Schematic diagram of vehicle acceleration limit
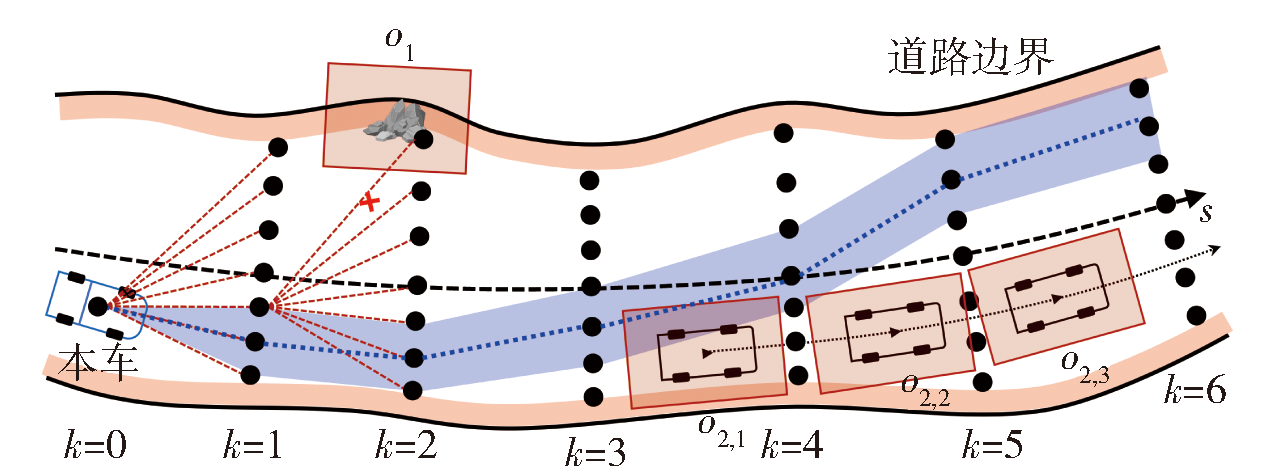
Fig.5 Schematic diagram of local driving route planning sprinkler sampling (o1 is a static obstacle, o2 is a dynamic obstacle, o2,k represents the polygonal envelope of obstacle 2 after collision processing at time k, and s is the direction of road centreline)
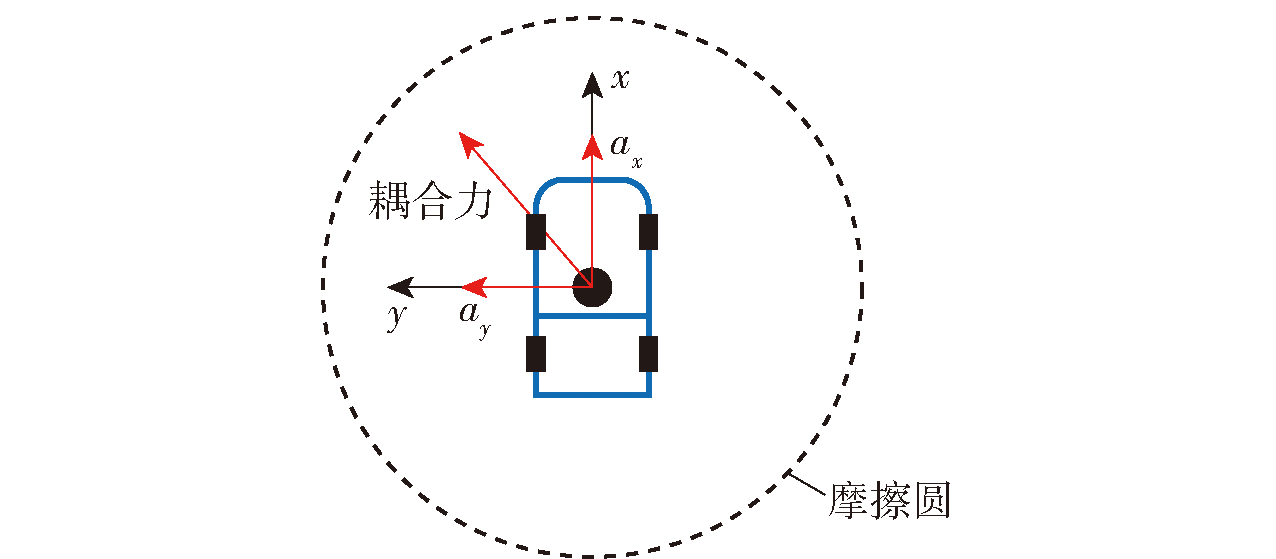
Fig.6 Point mass vehicle dynamics model
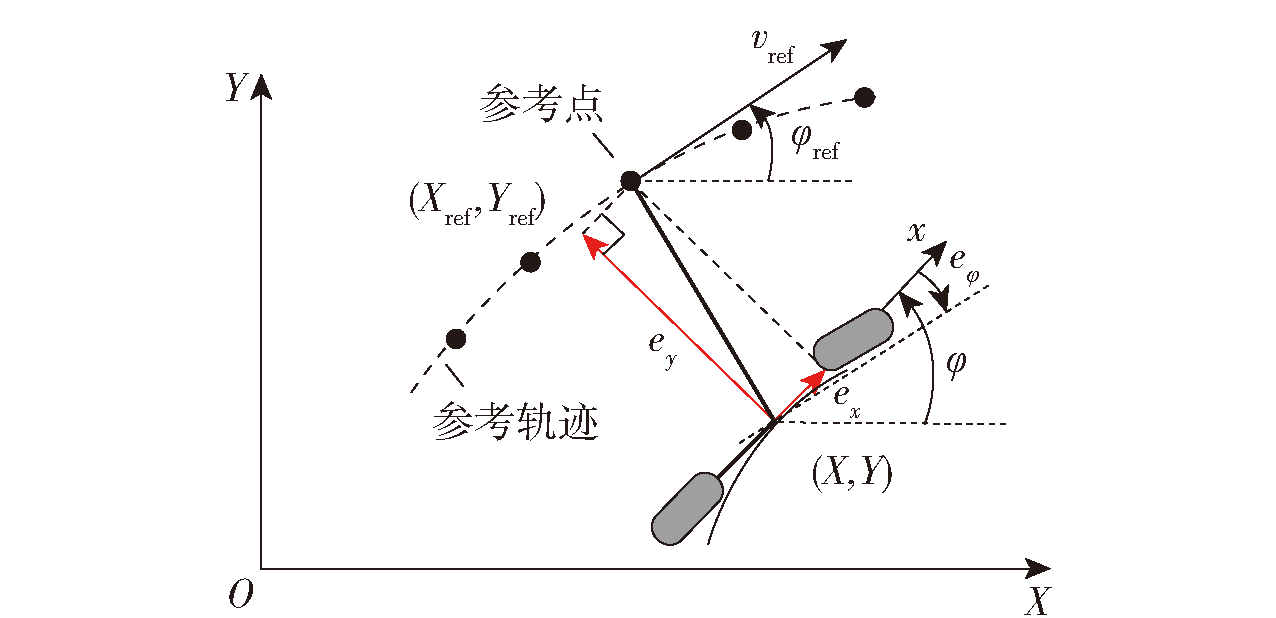
Fig.7 Schematic diagram of vehicle trajectory tracking error
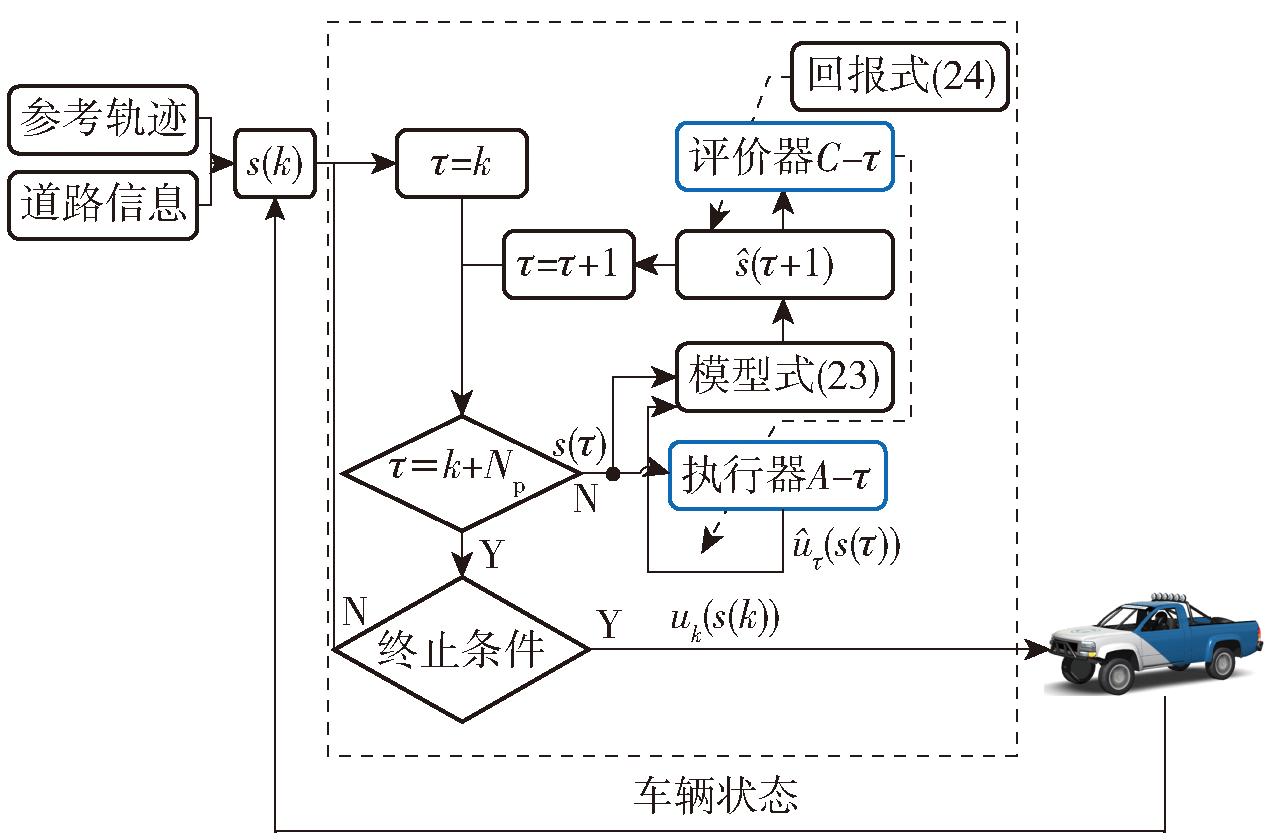
Fig.8 Structure diagram of intelligent vehicle high maneuvering motion controller based on learning predictive control
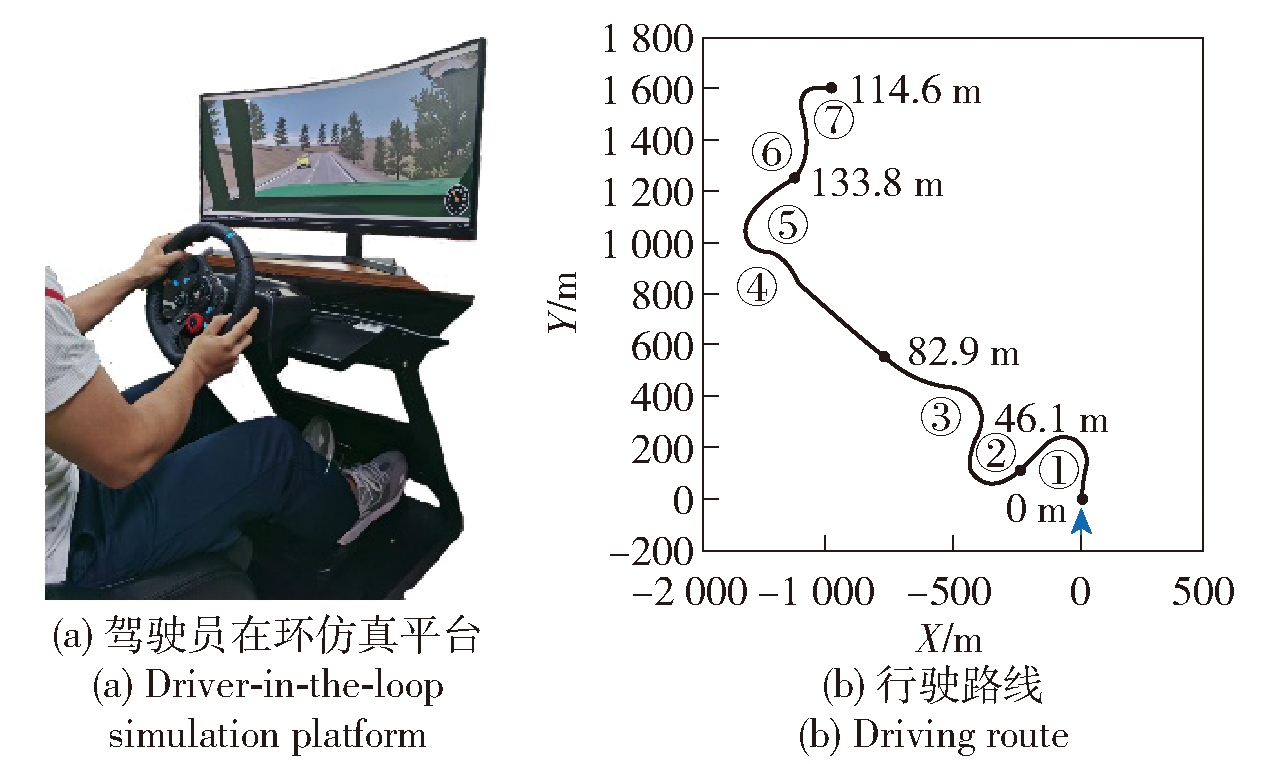
Fig.9 Mountain road scene and driving route
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 1555 | γ | 0.95 |
| hCG/m | 0.665 | ns | 15 |
| Ix/(kg·m2) | 846.6 | ζ | 1.1 |
| Iy/(kg·m2) | 1 816 | nd | 6 |
| Iz/(kg·m2) | 1 816 | Np | 30 |
| lf/m | 1.85 | Tp/s | 0.2 |
| lr/m | 1.80 | qc | 0.01 |
| Kϕ/(N·m·rad-1) | 51 600 | ql | 0.1 |
| Dϕ/(N·m·s·rad-1) | 5 300 | qω | 5.0 |
| Kθ/(N·m·rad-1) | 45 000 | 0.01 | |
| Dθ/(N·m·s·rad-1) | 2 600 | 0.5 | |
| Ccf/(N·rad-1) | 76 500 | 0.2 | |
| Ccr/(N·rad-1) | 76 500 | 1 | |
| w/m | 1.7 | Nc | 50 |
| ay,max/(m·s-2) | 4 | Tc/s | 0.02 |
| ay,min/(m·s-2) | -4 | imax | 5 |
| ax,max/(m·s-2) | -4 | /m | 0.2 |
| ax,min/(m·s-2) | -6 | 0.2 | |
| w1 | 0.5 | 0.2 | |
| w2 | 3.0 | 0.1 | |
| w3 | 0.5 | 10-9 | |
| w4 | 0.5 | 0.05 |
Table 1 Vehicle model parameters, and planner and controller parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 1555 | γ | 0.95 |
| hCG/m | 0.665 | ns | 15 |
| Ix/(kg·m2) | 846.6 | ζ | 1.1 |
| Iy/(kg·m2) | 1 816 | nd | 6 |
| Iz/(kg·m2) | 1 816 | Np | 30 |
| lf/m | 1.85 | Tp/s | 0.2 |
| lr/m | 1.80 | qc | 0.01 |
| Kϕ/(N·m·rad-1) | 51 600 | ql | 0.1 |
| Dϕ/(N·m·s·rad-1) | 5 300 | qω | 5.0 |
| Kθ/(N·m·rad-1) | 45 000 | 0.01 | |
| Dθ/(N·m·s·rad-1) | 2 600 | 0.5 | |
| Ccf/(N·rad-1) | 76 500 | 0.2 | |
| Ccr/(N·rad-1) | 76 500 | 1 | |
| w/m | 1.7 | Nc | 50 |
| ay,max/(m·s-2) | 4 | Tc/s | 0.02 |
| ay,min/(m·s-2) | -4 | imax | 5 |
| ax,max/(m·s-2) | -4 | /m | 0.2 |
| ax,min/(m·s-2) | -6 | 0.2 | |
| w1 | 0.5 | 0.2 | |
| w2 | 3.0 | 0.1 | |
| w3 | 0.5 | 10-9 | |
| w4 | 0.5 | 0.05 |
| 符号 | 描述 |
|---|---|
| ttask | 完成驾驶任务总时长 |
| L2c | 车辆在违反安全区域边界情况下的行驶距离 |
| 转向操作做功,定义为 = ( + )dt |
Table 2 Performance indicators
| 符号 | 描述 |
|---|---|
| ttask | 完成驾驶任务总时长 |
| L2c | 车辆在违反安全区域边界情况下的行驶距离 |
| 转向操作做功,定义为 = ( + )dt |

Fig.10 Simulated results of human-machine collaborative driving in uphill scene

Fig.11 Simulated results of manual driving in uphill scene
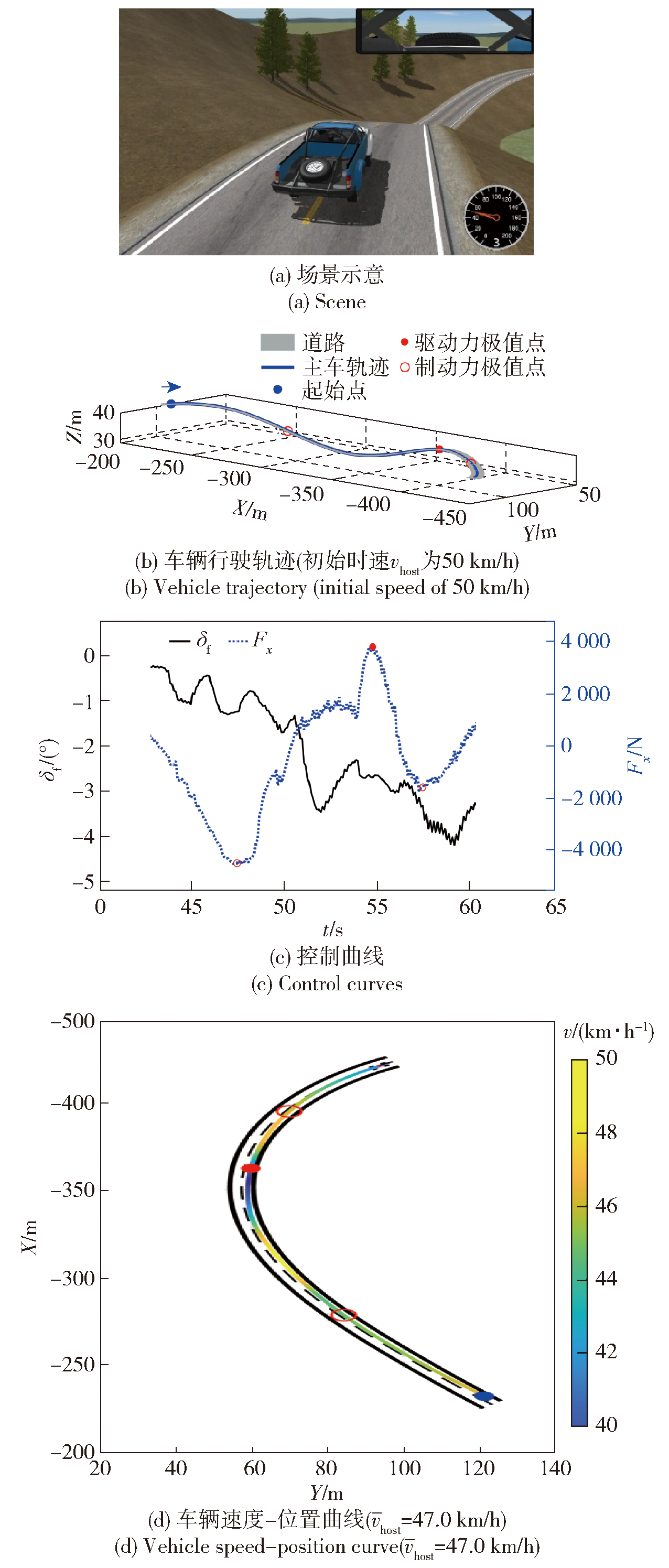
Fig.12 Simulated results of human-machine collaborative driving in downhill scene

Fig.13 Simulated results of manual driving in downhill scene
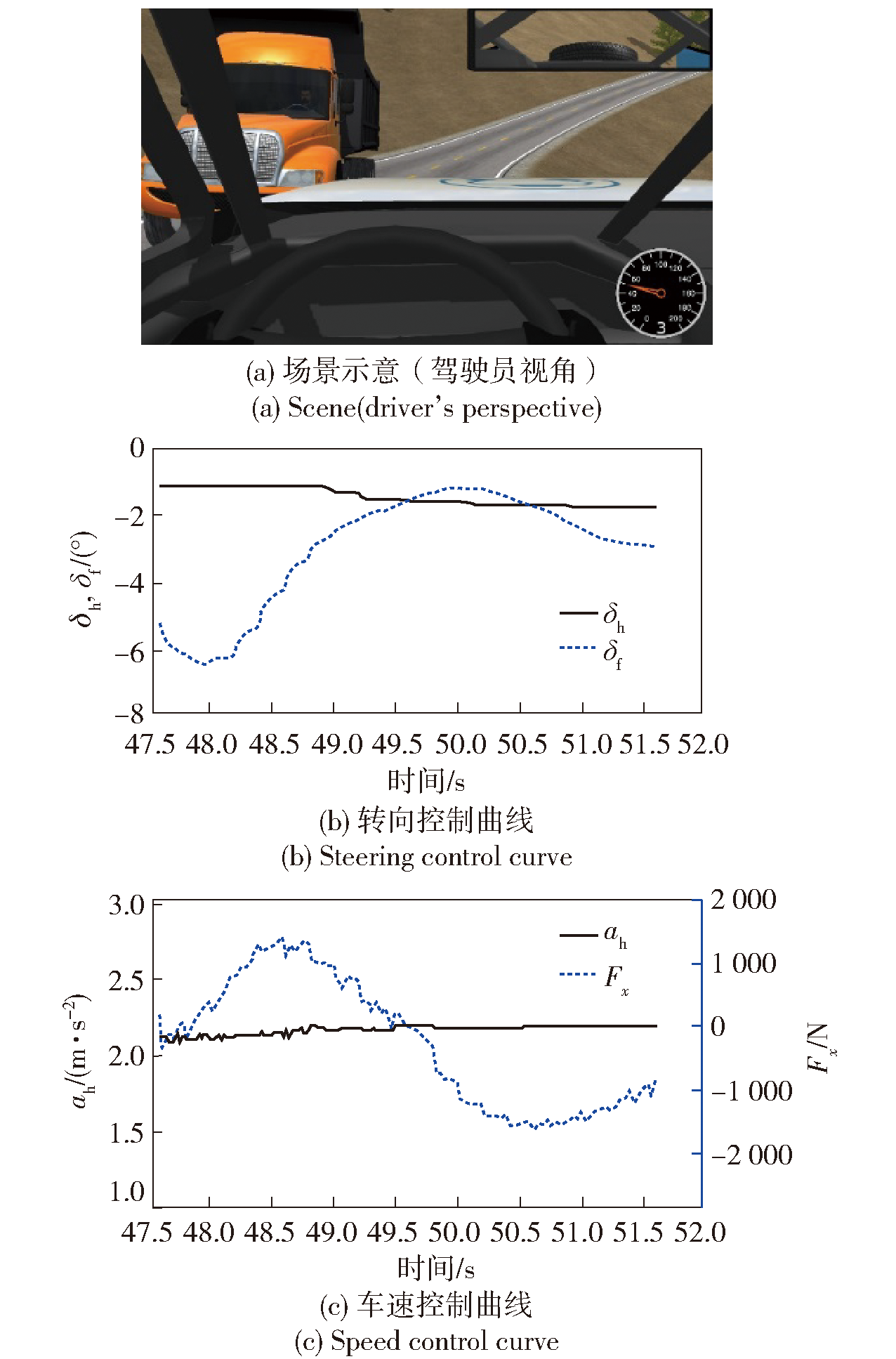
Fig.14 Simulated results of the scene of vehicles meeting on the winding mountain road
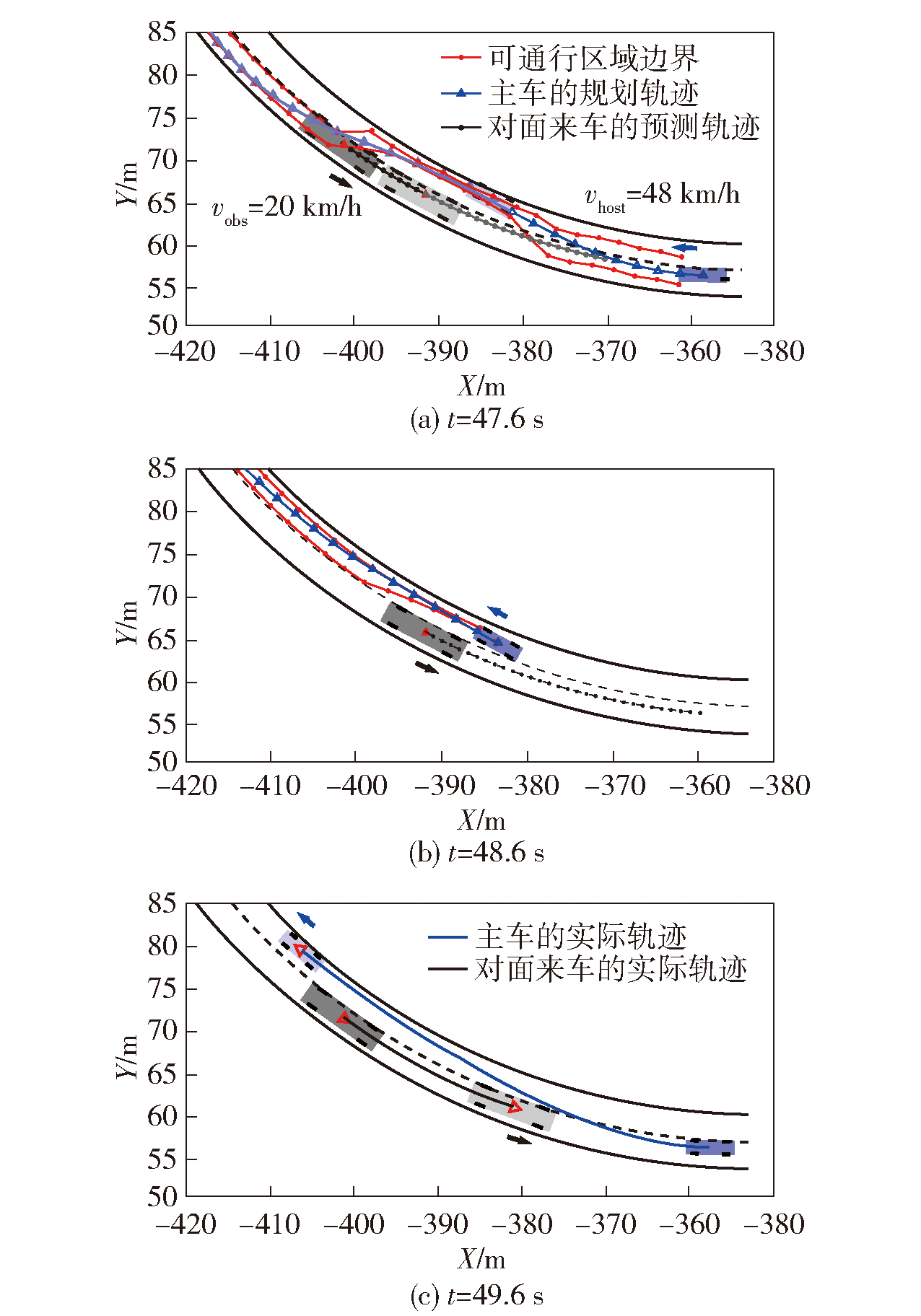
Fig.15 Positions and trajectories of two vehicles at different times
| 方法 | 指标 | 测试人员 | |||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| 手动驾驶 | ttask/s | 268.4 | 244.9 | 247.9 | 233.5 | 227.7 | 248.1 |
| L2c/m | 190.2 | 6.0 | 29.0 | 56.8 | 96.9 | 173.7 | |
| 2945 | 2155 | 2089 | 2766 | 2587 | 1037 | ||
| 对比方法[ | ttask/s | 226.1 | 237.4 | 238.7 | 229.3 | 245.6 | 232.4 |
| L2c/m | 2.7 | 8.5 | 3.1 | 5.5 | 0 | 1.8 | |
| 1557 | 1157 | 1256 | 1564 | 1437 | 975 | ||
| 本文方法 | ttask/s | 224.6 | 217.9 | 234.8 | 218.9 | 234.5 | 217.4 |
| L2c/m | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1717 | 914 | 1011 | 975 | 1168 | 852 | ||
Table 3 Statistics of performance indicators of different control methods in mountain road scene
| 方法 | 指标 | 测试人员 | |||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| 手动驾驶 | ttask/s | 268.4 | 244.9 | 247.9 | 233.5 | 227.7 | 248.1 |
| L2c/m | 190.2 | 6.0 | 29.0 | 56.8 | 96.9 | 173.7 | |
| 2945 | 2155 | 2089 | 2766 | 2587 | 1037 | ||
| 对比方法[ | ttask/s | 226.1 | 237.4 | 238.7 | 229.3 | 245.6 | 232.4 |
| L2c/m | 2.7 | 8.5 | 3.1 | 5.5 | 0 | 1.8 | |
| 1557 | 1157 | 1256 | 1564 | 1437 | 975 | ||
| 本文方法 | ttask/s | 224.6 | 217.9 | 234.8 | 218.9 | 234.5 | 217.4 |
| L2c/m | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1717 | 914 | 1011 | 975 | 1168 | 852 | ||
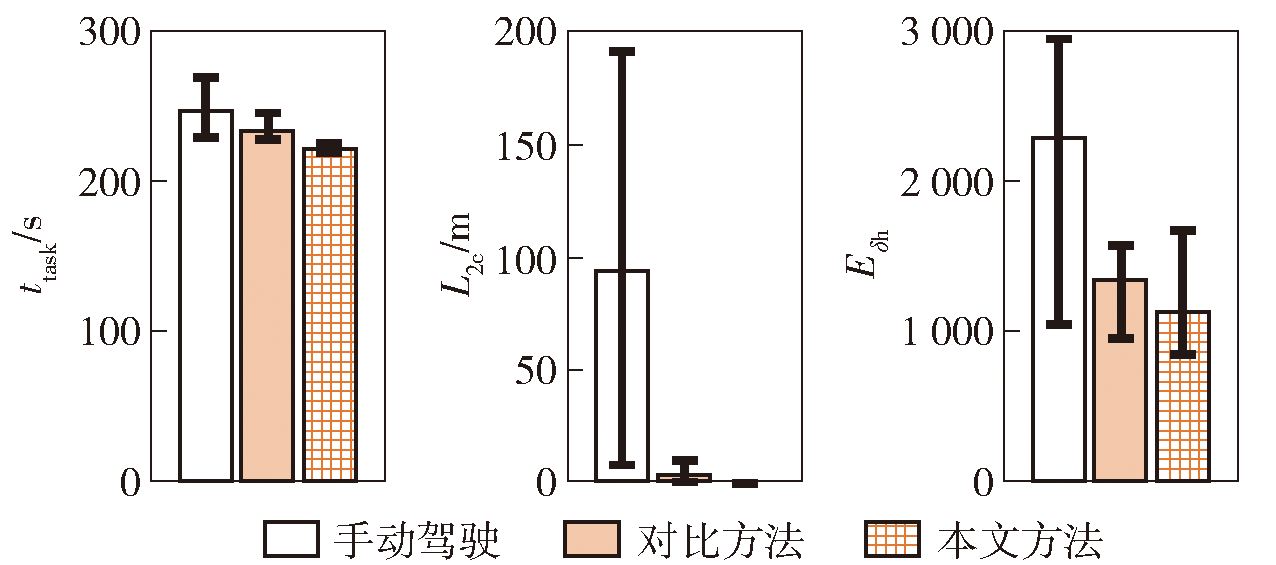
Fig.16 Performance comparison of different control methods in mountain road scene
| [1] |
陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6):1203-1214.
doi: 10.3969/j.issn.1000-1093.2017.06.021 |
|
|
|
| [2] |
胡云峰, 曲婷, 刘俊, 等. 智能汽车人机协同控制的研究现状与展望[J]. 自动化学报, 2019, 45(7):1261-1280.
|
|
|
|
| [3] |
doi: 10.1109/TIV.2022.3154426 URL |
| [4] |
刘俊. 智能车辆人机协同转向控制策略研究[D]. 长春: 吉林大学, 2020:13-29.
|
|
|
|
| [5] |
doi: 10.1109/TII.2018.2865105 URL |
| [6] |
doi: 10.1109/TITS.6979 URL |
| [7] |
doi: 10.1016/j.conengprac.2018.04.007 URL |
| [8] |
doi: 10.1080/00423114.2016.1256489 URL |
| [9] |
doi: 10.1049/itr2.v12.6 URL |
| [10] |
doi: 10.1109/TCST.2012.2200826 URL |
| [11] |
doi: 10.1109/TVT.2016.2555853 URL |
| [12] |
doi: 10.1002/oca.v36.5 URL |
| [13] |
doi: 10.1109/TCYB.2015.2478857 URL |
| [14] |
doi: 10.1109/TIV.2022.3167271 URL |
| [15] |
龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2020.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
doi: 10.1016/j.eswa.2020.114186 URL |
| [19] |
doi: 10.1002/oca.v36.5 URL |
| [20] |
doi: 10.1016/j.ifacol.2020.12.073 URL |
| [21] |
doi: 10.1016/j.aap.2021.106301 URL |
| [1] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [2] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [3] | CAO Zijian, SUN Zelong, YAN Guochuang, FU Yanfang, YANG Bo, LI Qinjie, LEI Kailin, GAO Linghang. Simulation of Reinforcement Learning-based UAV Swarm Adversarial Strategy Deduction [J]. Acta Armamentarii, 2023, 44(S2): 126-134. |
| [4] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [5] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [6] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [7] | ZHANG Jiandong, WANG Dinghan, YANG Qiming, SHI Guoqing, LU Yi, ZHANG Yaozhong. Multi-Dimensional Decision-Making for UAV Air Combat Based on Hierarchical Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(6): 1547-1563. |
| [8] | LI Chao, WANG Ruixing, HUANG Jianzhong, JIANG Feilong, WEI Xuemei, SUN Yanxin. Autonomous Decision-making and Intelligent Collaboration of UAV Swarms Based on Reinforcement Learning with Sparse Rewards [J]. Acta Armamentarii, 2023, 44(6): 1537-1546. |
| [9] | ZHENG Zexin, LI Wei, ZOU Kun, LI Yanfu. Anti-jamming Waveform Design of Ground-based Air Surveillance Radar Based on Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(5): 1422-1430. |
| [10] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [11] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [12] | ZHAO Wenfei, CHEN Jian, WANG Yan, TENG Kenan. Dynamic Firepower Allocation for Cooperative Air Defense of Strategic Locations on the Sea Based on Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(11): 3516-3528. |
| [13] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [14] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [15] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||