
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 240863-.doi: 10.12382/bgxb.2024.0863
Previous Articles Next Articles
LI Junhui1, WANG Wei1, WANG Yuchen2,*( ), JI Yi3
), JI Yi3
Received:2024-09-19
Online:2025-08-28
Contact:
WANG Yuchen
CLC Number:
LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory[J]. Acta Armamentarii, 2025, 46(8): 240863-.
Add to citation manager EndNote|Ris|BibTeX
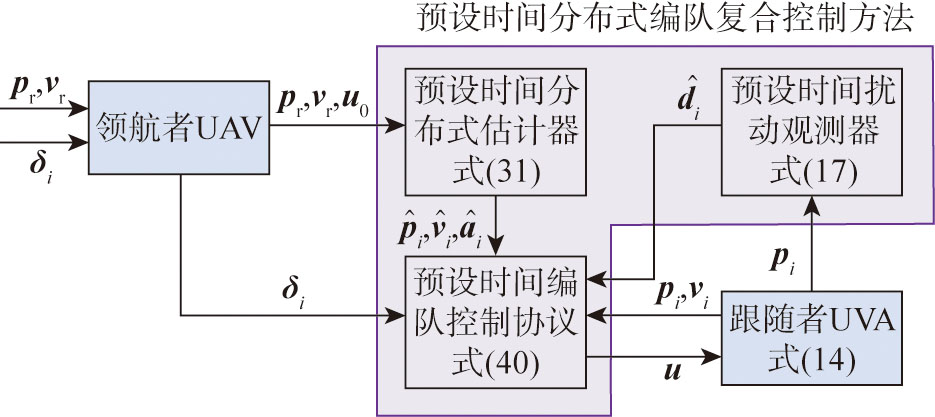
Fig.1 UAV formation control process
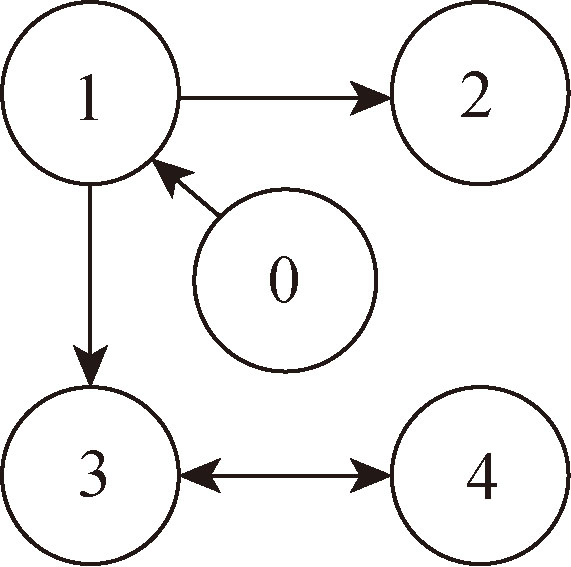
Fig.2 UAV communication topology
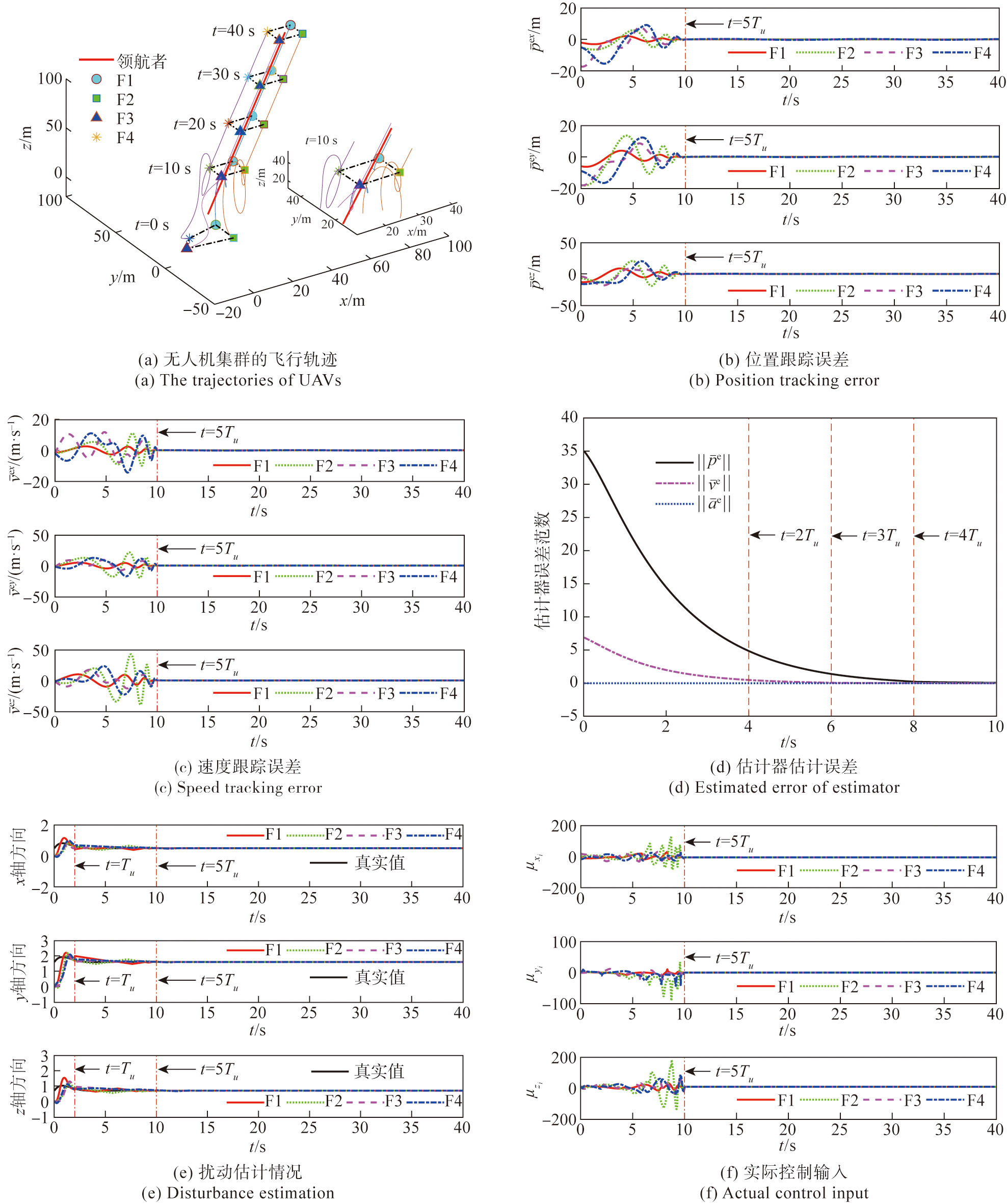
Fig.3 Simulated results of Case 1
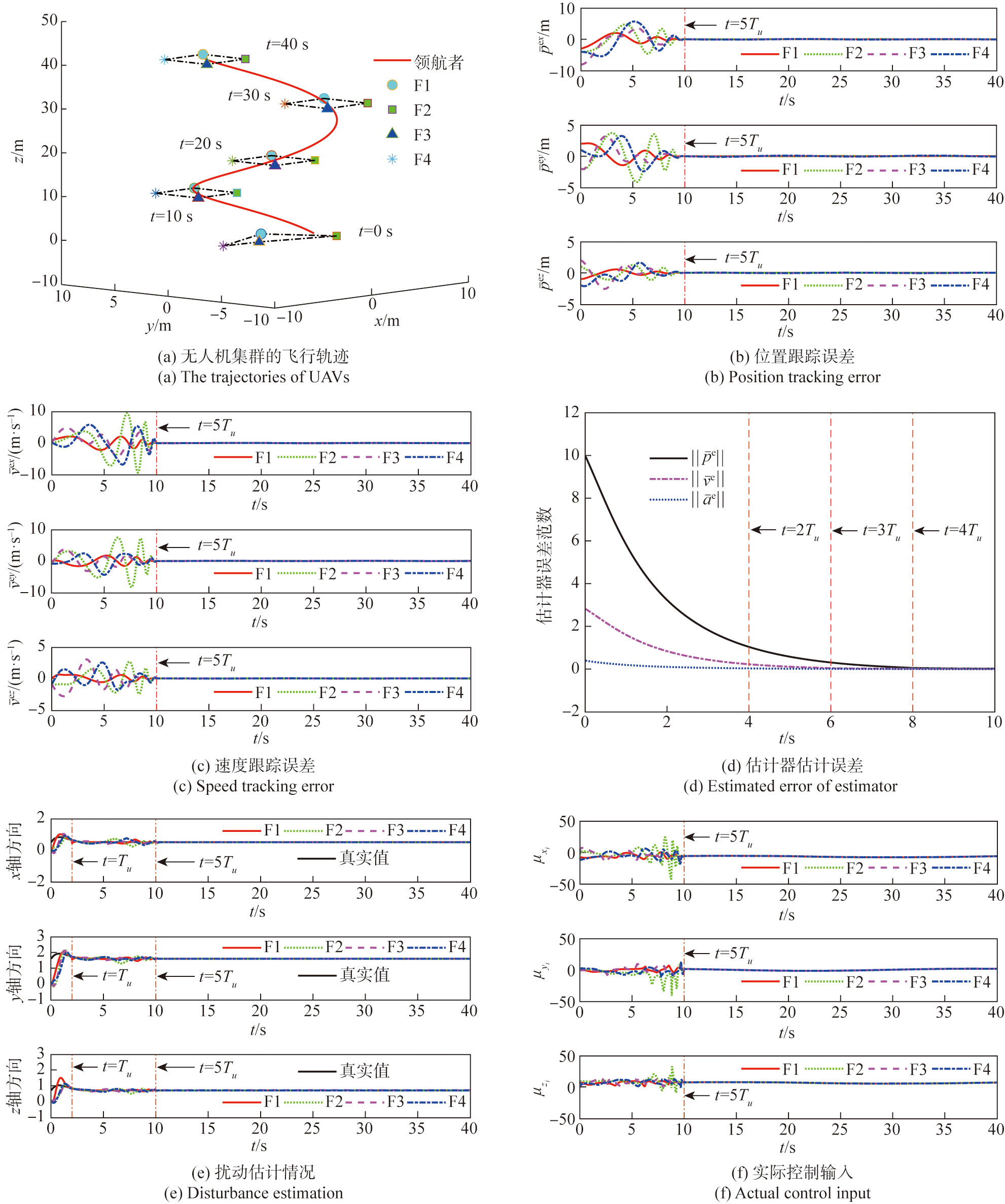
Fig.4 Simulaed results of Case 2
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0001 | 0.0027 | 0.0058 | 0.0092 |
| 速度跟踪误差/(m·s-1) | 0.0011 | 0.0027 | 0.0734 | 0.0966 |
| 位置估计误差/m | 3.1×10-16 | 1.5×10-14 | 1.3×10-5 | 2.2×10-5 |
| 速度估计误差/(m·s-1) | 1.9×10-13 | 6.2×10-7 | 3.1×10-5 | 5.0×10-5 |
| 加速度估计误差/(m·s-2) | 0 | 0 | 0 | 0 |
| Tu扰动估计误差 | 0.3529 | 0.1912 | 0.0367 | 0.2274 |
| 5Tu扰动估计误差 | 0.0170 | 0.0087 | 0.0182 | 0.0638 |
Table 1 Tracking error and estimated error (Case 1)
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0001 | 0.0027 | 0.0058 | 0.0092 |
| 速度跟踪误差/(m·s-1) | 0.0011 | 0.0027 | 0.0734 | 0.0966 |
| 位置估计误差/m | 3.1×10-16 | 1.5×10-14 | 1.3×10-5 | 2.2×10-5 |
| 速度估计误差/(m·s-1) | 1.9×10-13 | 6.2×10-7 | 3.1×10-5 | 5.0×10-5 |
| 加速度估计误差/(m·s-2) | 0 | 0 | 0 | 0 |
| Tu扰动估计误差 | 0.3529 | 0.1912 | 0.0367 | 0.2274 |
| 5Tu扰动估计误差 | 0.0170 | 0.0087 | 0.0182 | 0.0638 |
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0082 | 0.0082 | 0.0058 | 0.0074 |
| 速度跟踪误差/(m·s-1) | 0.0020 | 0.0068 | 0.0160 | 0.0294 |
| 位置估计误差/m | 7.6×10-7 | 1.2×10-5 | 0.0165 | 0.0267 |
| 速度估计误差/(m·s-1) | 3.8×10-6 | 5.5×10-5 | 0.0124 | 0.0201 |
| 加速度估计误差/(m·s-2) | 2.9×10-5 | 4.5×10-4 | 0.0099 | 0.0160 |
| Tu扰动估计误差 | 0.1343 | 0.0189 | 0.0241 | 0.0272 |
| 5Tu扰动估计误差 | 0.0092 | 0.0162 | 0.0137 | 0.0390 |
Table 2 Tracking error and estimated error (Case 2)
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0082 | 0.0082 | 0.0058 | 0.0074 |
| 速度跟踪误差/(m·s-1) | 0.0020 | 0.0068 | 0.0160 | 0.0294 |
| 位置估计误差/m | 7.6×10-7 | 1.2×10-5 | 0.0165 | 0.0267 |
| 速度估计误差/(m·s-1) | 3.8×10-6 | 5.5×10-5 | 0.0124 | 0.0201 |
| 加速度估计误差/(m·s-2) | 2.9×10-5 | 4.5×10-4 | 0.0099 | 0.0160 |
| Tu扰动估计误差 | 0.1343 | 0.0189 | 0.0241 | 0.0272 |
| 5Tu扰动估计误差 | 0.0092 | 0.0162 | 0.0137 | 0.0390 |
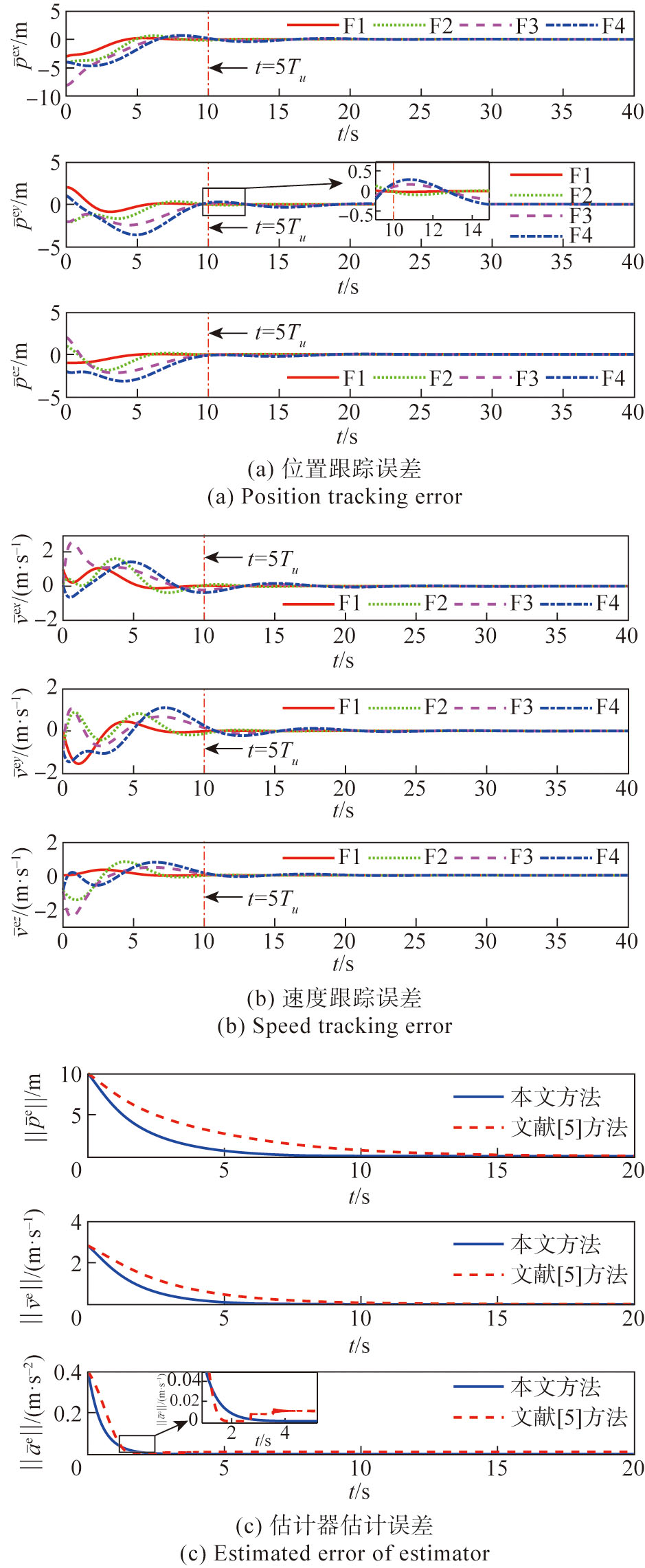
Fig.5 Simulated results Ref.[5] under Case 2
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0231 | 0.1059 | 0.1881 | 0.2698 |
| 速度跟踪误差/(m·s-1) | 0.0158 | 0.0807 | 0.0613 | 0.1214 |
| 位置估计误差/m | 0.0024 | 0.0208 | 0.3798 | 0.6132 |
| 速度估计误差/(m·s-1) | 0.0020 | 0.0138 | 0.0967 | 0.1545 |
| 加速度估计误差/(m·s-2) | 2.3×10-16 | 9.6×10-15 | 1.4×10-6 | 2.1×10-6 |
Table 3 Contrast experiment (Case 2)
| 参数 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 位置跟踪误差/m | 0.0231 | 0.1059 | 0.1881 | 0.2698 |
| 速度跟踪误差/(m·s-1) | 0.0158 | 0.0807 | 0.0613 | 0.1214 |
| 位置估计误差/m | 0.0024 | 0.0208 | 0.3798 | 0.6132 |
| 速度估计误差/(m·s-1) | 0.0020 | 0.0138 | 0.0967 | 0.1545 |
| 加速度估计误差/(m·s-2) | 2.3×10-16 | 9.6×10-15 | 1.4×10-6 | 2.1×10-6 |
| [1] |
曾照洋, 彭文胜, 李云凯, 等. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3):240322.
doi: 10.12382/bgxb.2024.0322 |
|
|
|
| [2] |
|
| [3] |
|
| [4] |
潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2):326-334.
doi: 10.3969/j.issn.1000-1093.2017.02.017 |
|
|
|
| [5] |
|
| [6] |
邹尧, 孟子阳. 垂直起降飞行器的自适应集群编队飞行控制[J]. 中国科学:技术科学, 2020, 50(4):369-379.
|
|
|
|
| [7] |
张清瑞, 刘赟韵, 孙慧杰, 等. 固定翼无人机紧密编队的鲁棒协同跟踪控制[J]. 航空学报, 2024, 45(1):629233.
doi: 10.7527/S1000-6893.2023.29233 |
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
马骥, 陈向勇, 温广辉, 等. 随机切换拓扑下无人机集群预设时间跟踪控制[J]. 航空学报, 2024, 45(增刊1):730793.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1016/j.isatra.2020.09.012 pmid: 33051052 |
| [26] |
|
| [27] |
|
| [28] |
|
| [1] | ZHANG Pei, ZHANG An, BI Wenhao, MAO Zeming. A Maneuver Strategy of UAV to Evade a Medium-long Range Air-to-air Missile in Terminal Guidance [J]. Acta Armamentarii, 2025, 46(9): 240972-. |
| [2] | YUAN Shusen, HU Zhe, YI Wenjun, DENG Wenxiang, YAO Jianyong, YANG Guolai, GUAN Jun, WANG Yimin. Active Disturbance Adaptive Composite Control of Stabilization System for Unmanned Vehicle-mounted Gun during Moving [J]. Acta Armamentarii, 2025, 46(9): 240888-. |
| [3] | WANG Zhuoyao, LI Chuanjun, MA Jingquan, YU Jiaqi. Real-time Coordinated Trajectory Planning Method of Unpowered Gliding Vehicle Clusters [J]. Acta Armamentarii, 2025, 46(8): 240827-. |
| [4] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [5] | WANG Zeqing, XU Haixiang, YU Wenzhao, DU Zhe, WANG Hongmei. Dual-Loop Prescribed-Time 3D Formation Control of Underactuated Multi-AUVs [J]. Acta Armamentarii, 2025, 46(8): 250046-. |
| [6] | ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion [J]. Acta Armamentarii, 2025, 46(8): 240751-. |
| [7] | SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing [J]. Acta Armamentarii, 2025, 46(7): 240797-. |
| [8] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [9] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [10] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [11] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [12] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [13] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [14] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [15] | WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction [J]. Acta Armamentarii, 2025, 46(4): 240410-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||