
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (7): 240710-.doi: 10.12382/bgxb.2024.0710
Previous Articles Next Articles
XIAO Peng1,*( ), YU Haixia1, HUANG Long2, ZHANG Siming1
), YU Haixia1, HUANG Long2, ZHANG Siming1
Received:2024-08-21
Online:2025-08-12
Contact:
XIAO Peng
XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm[J]. Acta Armamentarii, 2025, 46(7): 240710-.
Add to citation manager EndNote|Ris|BibTeX
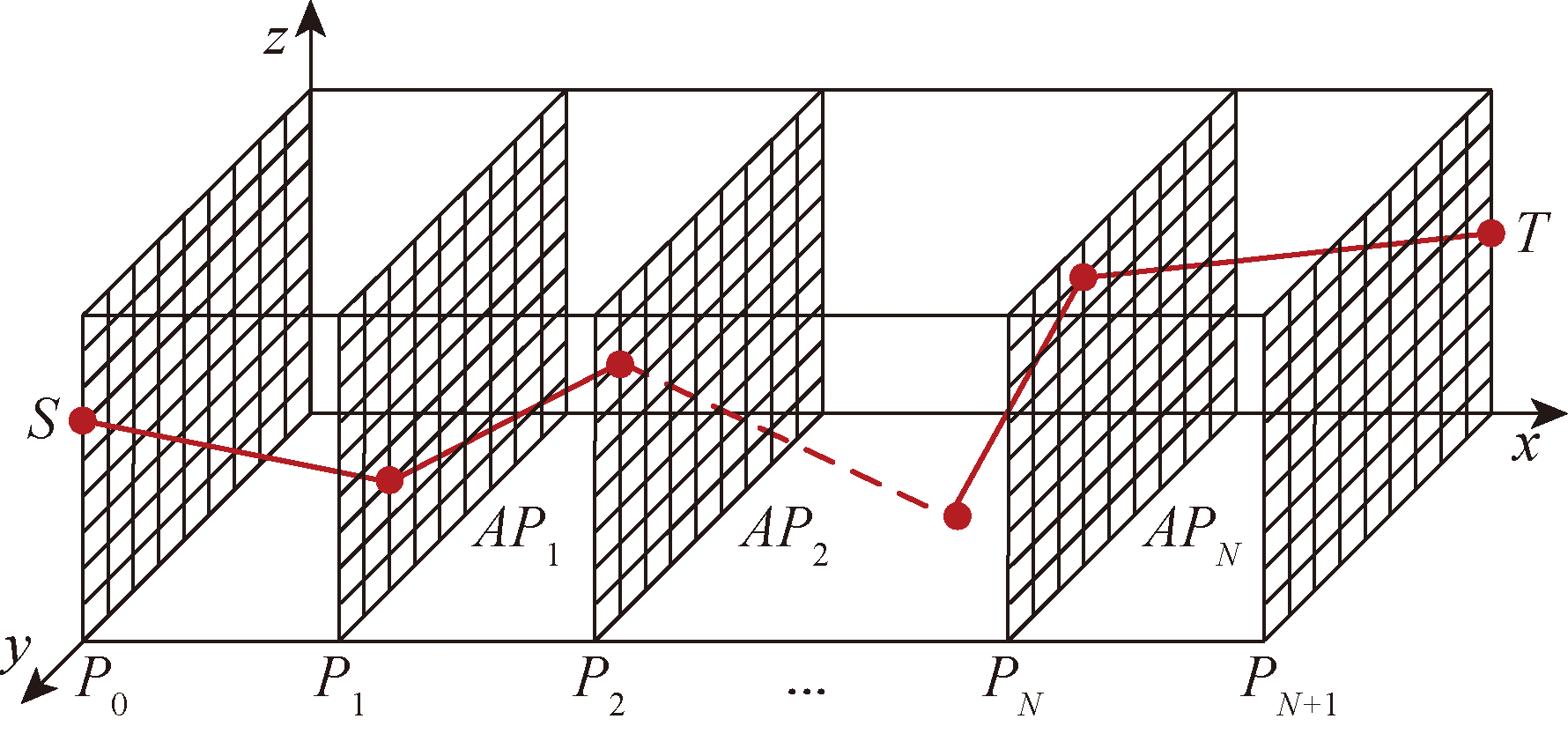
Fig.1 Grid method environment modeling diagram
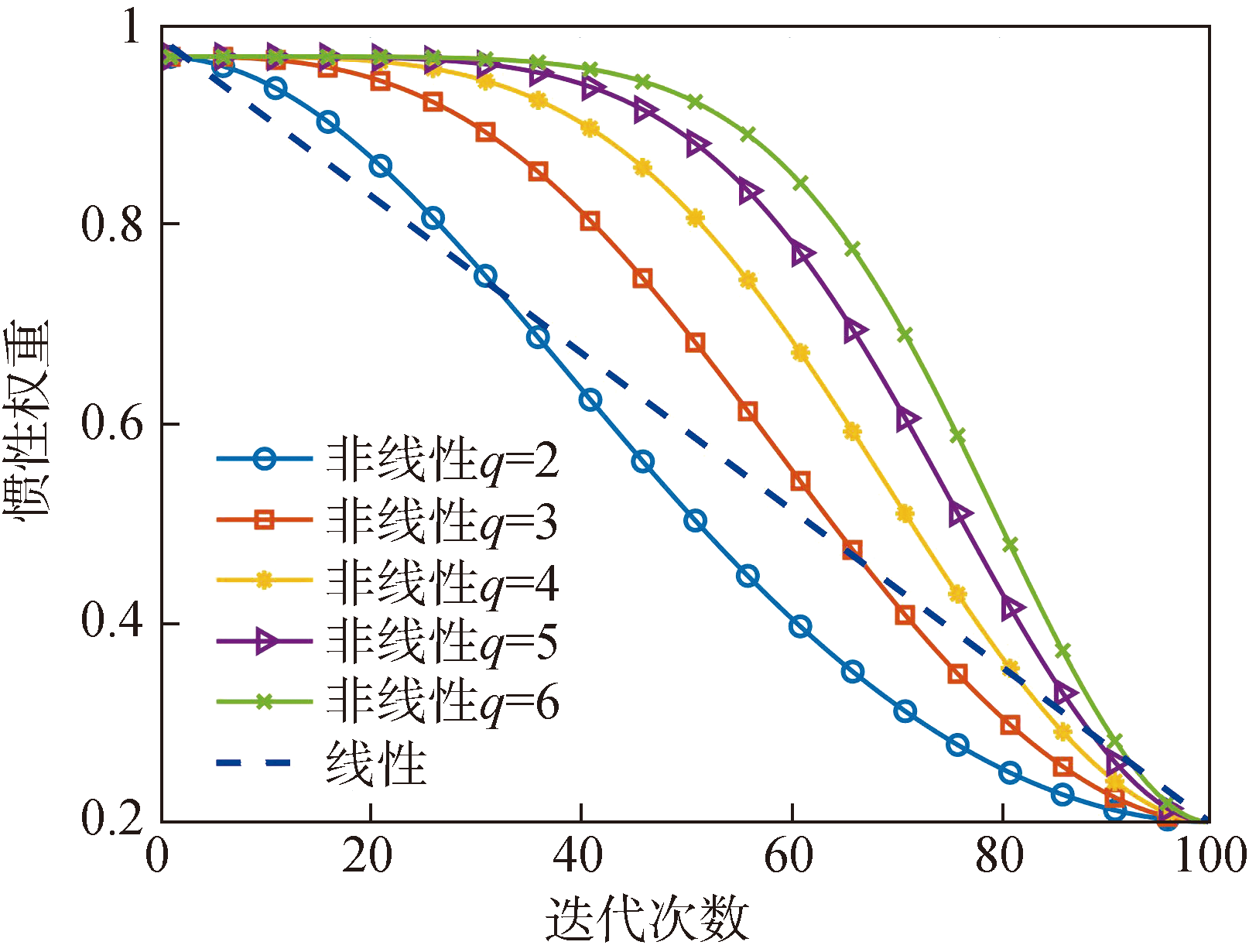
Fig.2 Inertia weight contrast curve
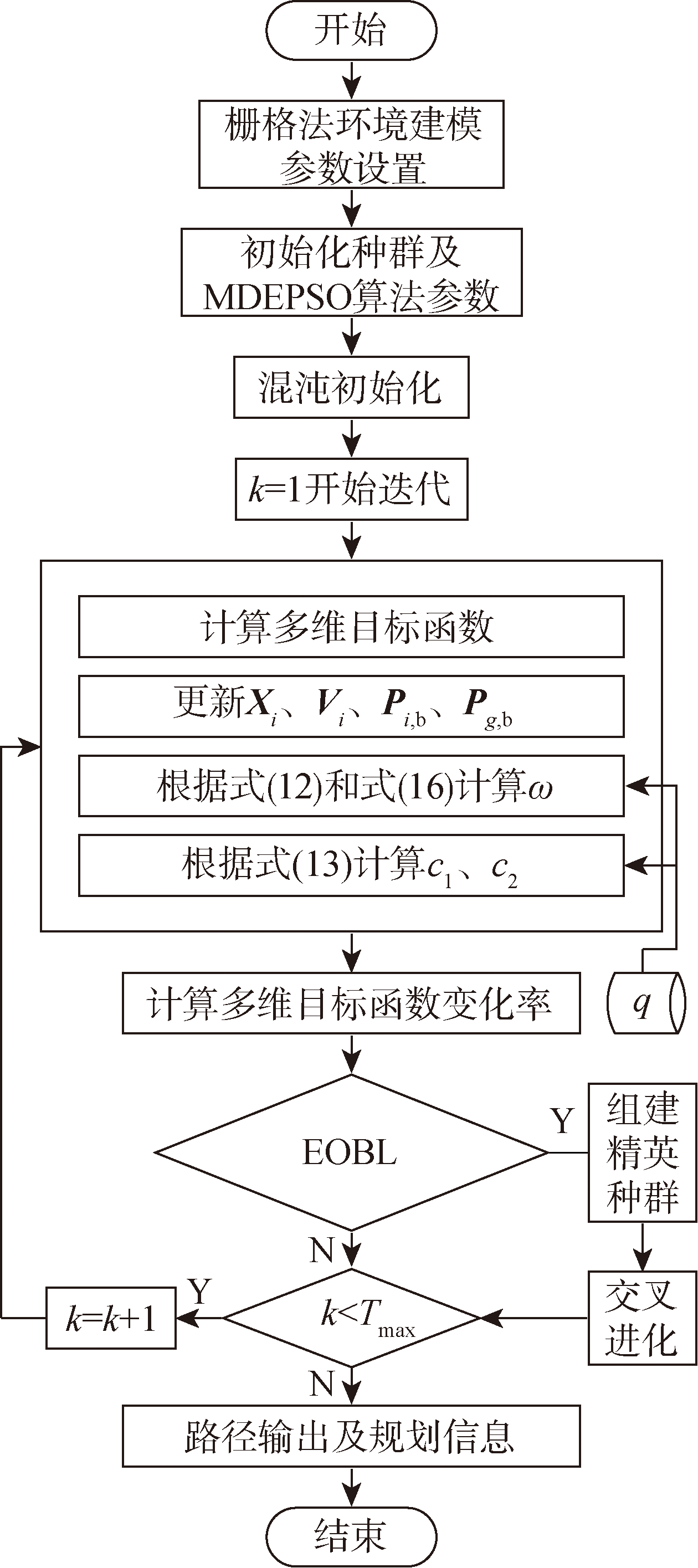
Fig.3 MDEPSO algorithm flow
| 表达式 | 搜索范围 | 最优解 |
|---|---|---|
| [-100,100] | 0 | |
| [-10,10] | 0 | |
| [-30,30] | 0 | |
| F4(x)=maxi{ ,1≤i≤D} | [-100,100] | 0 |
| [-600,600] | 0 | |
| [-32,32] | 0 | |
| [-50,50] | 0 | |
| [-50,50] | 0 |
Table1 Trial function
| 表达式 | 搜索范围 | 最优解 |
|---|---|---|
| [-100,100] | 0 | |
| [-10,10] | 0 | |
| [-30,30] | 0 | |
| F4(x)=maxi{ ,1≤i≤D} | [-100,100] | 0 |
| [-600,600] | 0 | |
| [-32,32] | 0 | |
| [-50,50] | 0 | |
| [-50,50] | 0 |
| 函数 | 指标 | PSO | CMOPSO | NMPSO | SSA-PSO | T-PSO | MDEPSO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.48×10-1 | 1.00×10-1 | 5.50×10-2 | 5.01×10-2 | 5.00×10-2 | 5.00×10-2 |
| SD | 3.02×10-1 | 2.69×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F2 | Mean | 3.90×10-1 | 2.85×10-1 | 3.98×10-1 | 1.41×10-1 | 8.01×10-2 | 5.04×10-2 |
| SD | 4.25×10-1 | 3.65×10-1 | 4.17×10-1 | 2.97×10-1 | 2.44×10-1 | 2.22×10-1 | |
| F3 | Mean | 2.64×10-1 | 1.82×10-1 | 1.54×10-1 | 1.30×10-1 | 7.63×10-2 | 5.23×10-2 |
| SD | 3.55×10-1 | 3.29×10-1 | 2.82×10-1 | 2.98×10-1 | 2.30×10-1 | 2.08×10-1 | |
| F4 | Mean | 2.83×10-1 | 1.76×10-1 | 2.06×10-1 | 1.00×10-2 | 5.01×10-5 | 5.25×10-17 |
| SD | 3.86×10-1 | 3.63×10-1 | 3.50×10-1 | 4.47×10-2 | 2.24×10-4 | 2.24×10-16 | |
| F5 | Mean | 7.29×105 | 1.61×10-5 | 6.75×10-5 | 1.58×10-5 | 1.85×10-5 | 1.49×10-4 |
| SD | 3.92×10-5 | 1.12×10-5 | 2.31×10-5 | 2.48×10-5 | 3.03×10-5 | 3.58×10-4 | |
| F6 | Mean | 1.01×10-1 | 8.16×10-2 | 1.14×10-1 | 5.00×10-2 | 5.00×10-2 | 5.01×10-2 |
| SD | 2.51×10-1 | 2.39×10-1 | 2.83×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F7 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 1.02×10-1 | 5.28×10-17 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.46×10-1 | 2.24×10-16 | |
| F8 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 5.00×10-2 | 5.17×10-27 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.24×10-1 | 2.24×10-26 |
Table2 Test function experiment results
| 函数 | 指标 | PSO | CMOPSO | NMPSO | SSA-PSO | T-PSO | MDEPSO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.48×10-1 | 1.00×10-1 | 5.50×10-2 | 5.01×10-2 | 5.00×10-2 | 5.00×10-2 |
| SD | 3.02×10-1 | 2.69×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F2 | Mean | 3.90×10-1 | 2.85×10-1 | 3.98×10-1 | 1.41×10-1 | 8.01×10-2 | 5.04×10-2 |
| SD | 4.25×10-1 | 3.65×10-1 | 4.17×10-1 | 2.97×10-1 | 2.44×10-1 | 2.22×10-1 | |
| F3 | Mean | 2.64×10-1 | 1.82×10-1 | 1.54×10-1 | 1.30×10-1 | 7.63×10-2 | 5.23×10-2 |
| SD | 3.55×10-1 | 3.29×10-1 | 2.82×10-1 | 2.98×10-1 | 2.30×10-1 | 2.08×10-1 | |
| F4 | Mean | 2.83×10-1 | 1.76×10-1 | 2.06×10-1 | 1.00×10-2 | 5.01×10-5 | 5.25×10-17 |
| SD | 3.86×10-1 | 3.63×10-1 | 3.50×10-1 | 4.47×10-2 | 2.24×10-4 | 2.24×10-16 | |
| F5 | Mean | 7.29×105 | 1.61×10-5 | 6.75×10-5 | 1.58×10-5 | 1.85×10-5 | 1.49×10-4 |
| SD | 3.92×10-5 | 1.12×10-5 | 2.31×10-5 | 2.48×10-5 | 3.03×10-5 | 3.58×10-4 | |
| F6 | Mean | 1.01×10-1 | 8.16×10-2 | 1.14×10-1 | 5.00×10-2 | 5.00×10-2 | 5.01×10-2 |
| SD | 2.51×10-1 | 2.39×10-1 | 2.83×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F7 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 1.02×10-1 | 5.28×10-17 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.46×10-1 | 2.24×10-16 | |
| F8 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 5.00×10-2 | 5.17×10-27 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.24×10-1 | 2.24×10-26 |
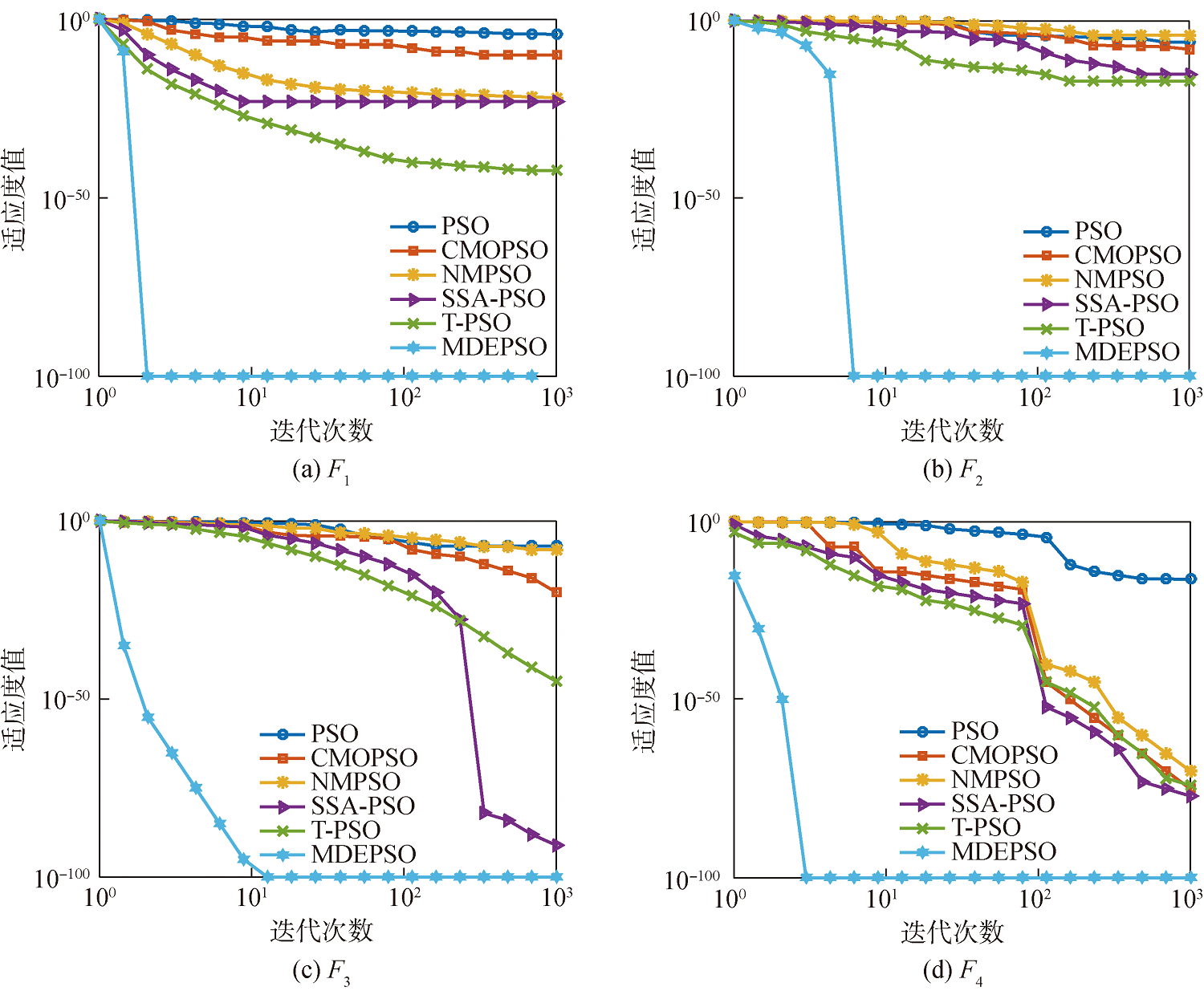
Fig.4 Convergence curve of single mode function
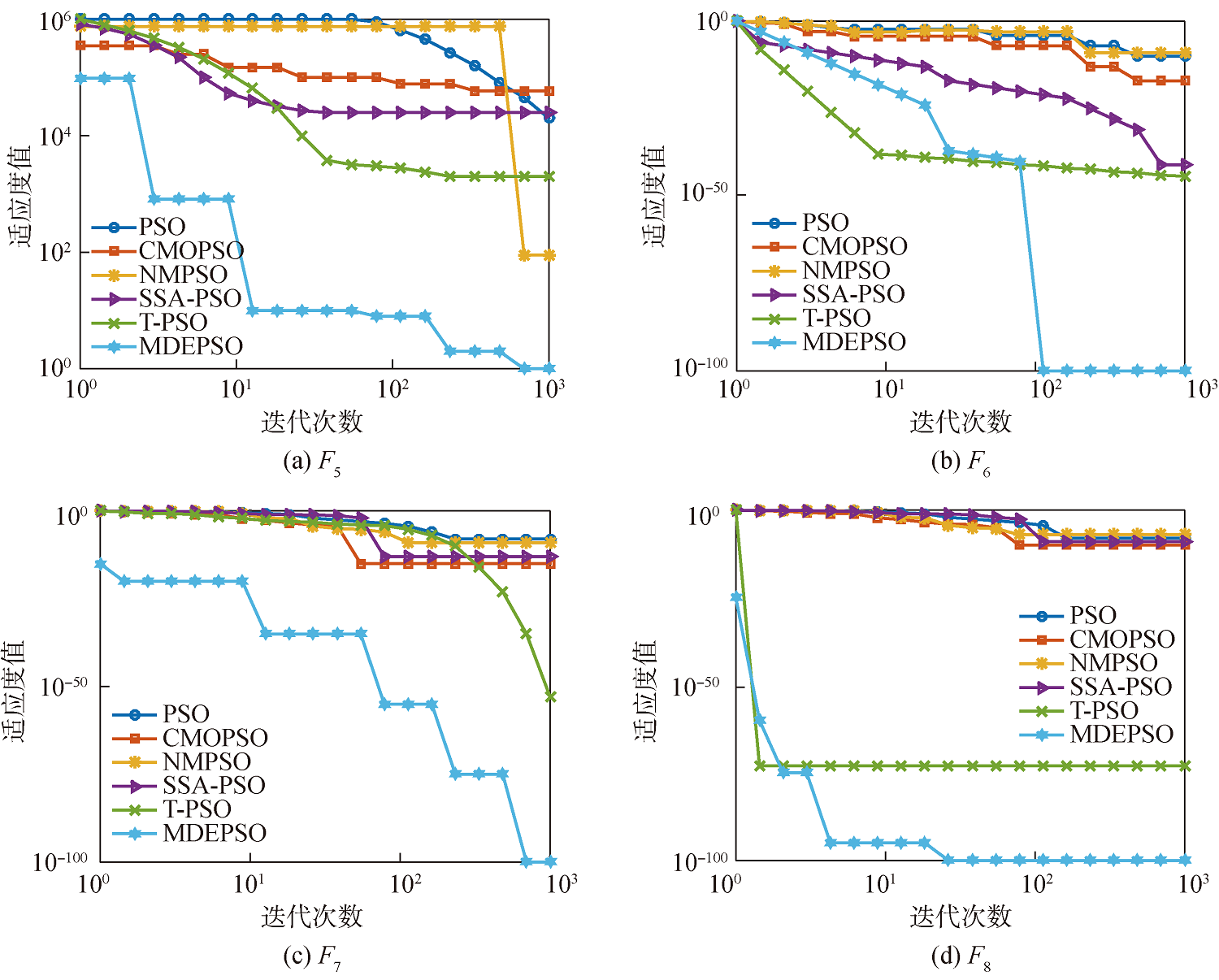
Fig.5 Convergence curve of multimodal function
| 场景 名称 | 山体中 心/km | 山体坡度 衰减量 | 山体高 度/km | 雷达中 心/km | 最大探 测距 离/km | 有效探 测距 离/km |
|---|---|---|---|---|---|---|
| 场景一 | (20,40) (40,10) (40,40) | (5,8) (5,5) (6,6) | 4 5 6 | (35,9) (25,30) (11,15) | 6.6 12 7.5 | 6 10 7 |
| 场景二 | (15,35) (25,25) (40,10) | (10,10) (10,10) (5,5) | 5 5 5.5 | (38,40) (20,40) (11,15) | 6.5 6.5 8.8 | 6 6 8.6 |
| 场景三 | (13,13) (25,25) (40,40) | (8,8) (8,8) (8,8) | 4 5 5 | (38,11) (26,38) (9,35) | 9 7.5 6.5 | 8 7 6 |
| 场景四 | (15,25) (30,25) (40,25) | (10,8) (10,8) (10,8) | 5 5 5 | (40,30) (9,15) (9,40) | 9 7.5 6.5 | 8 7 6 |
Table 3 Task scenario modeling parameters
| 场景 名称 | 山体中 心/km | 山体坡度 衰减量 | 山体高 度/km | 雷达中 心/km | 最大探 测距 离/km | 有效探 测距 离/km |
|---|---|---|---|---|---|---|
| 场景一 | (20,40) (40,10) (40,40) | (5,8) (5,5) (6,6) | 4 5 6 | (35,9) (25,30) (11,15) | 6.6 12 7.5 | 6 10 7 |
| 场景二 | (15,35) (25,25) (40,10) | (10,10) (10,10) (5,5) | 5 5 5.5 | (38,40) (20,40) (11,15) | 6.5 6.5 8.8 | 6 6 8.6 |
| 场景三 | (13,13) (25,25) (40,40) | (8,8) (8,8) (8,8) | 4 5 5 | (38,11) (26,38) (9,35) | 9 7.5 6.5 | 8 7 6 |
| 场景四 | (15,25) (30,25) (40,25) | (10,8) (10,8) (10,8) | 5 5 5 | (40,30) (9,15) (9,40) | 9 7.5 6.5 | 8 7 6 |
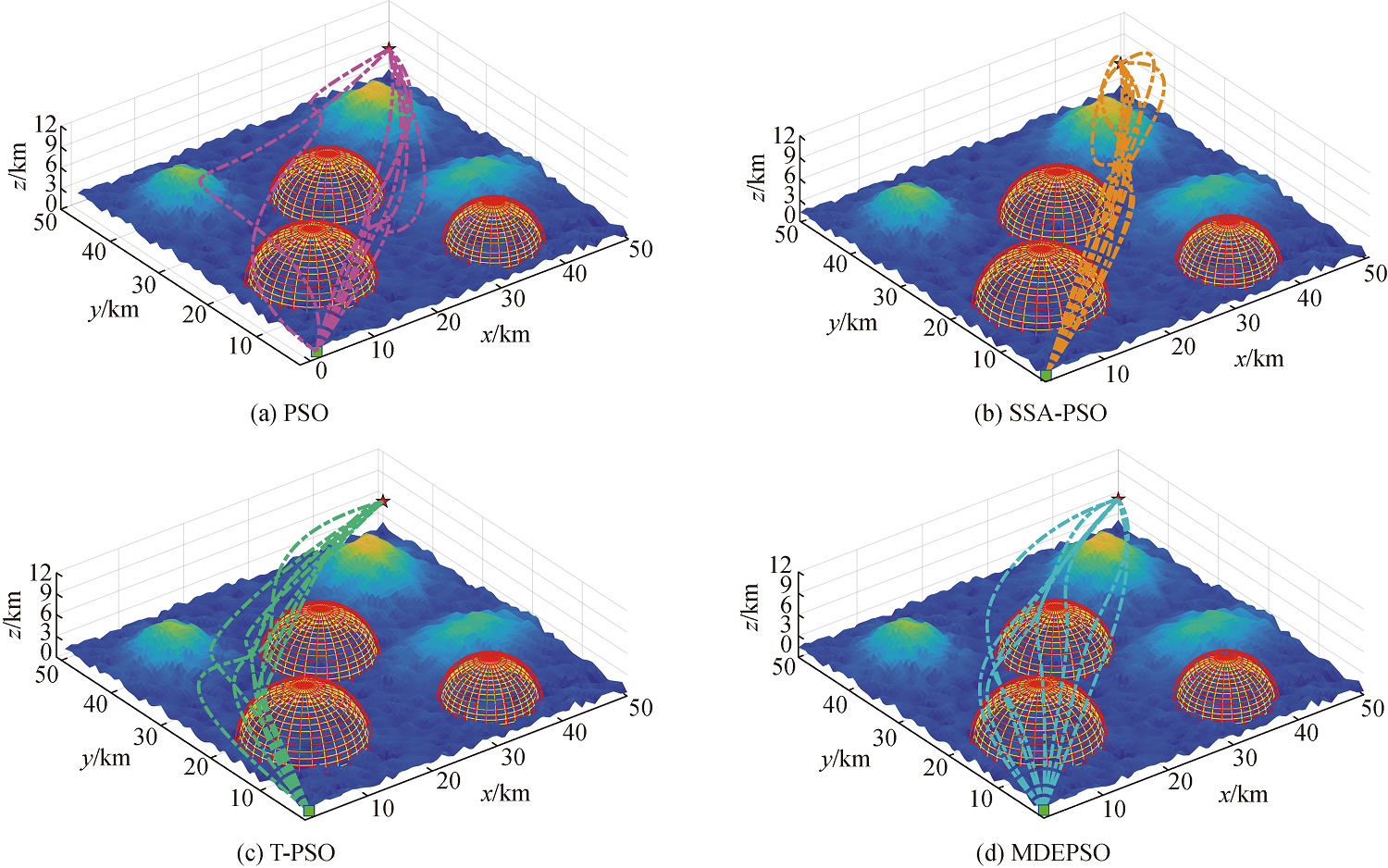
Fig.6 The trajectory planning process of each algorithm in scenario 1

Fig.7 Comparison of optimal flight path planning for each scenario
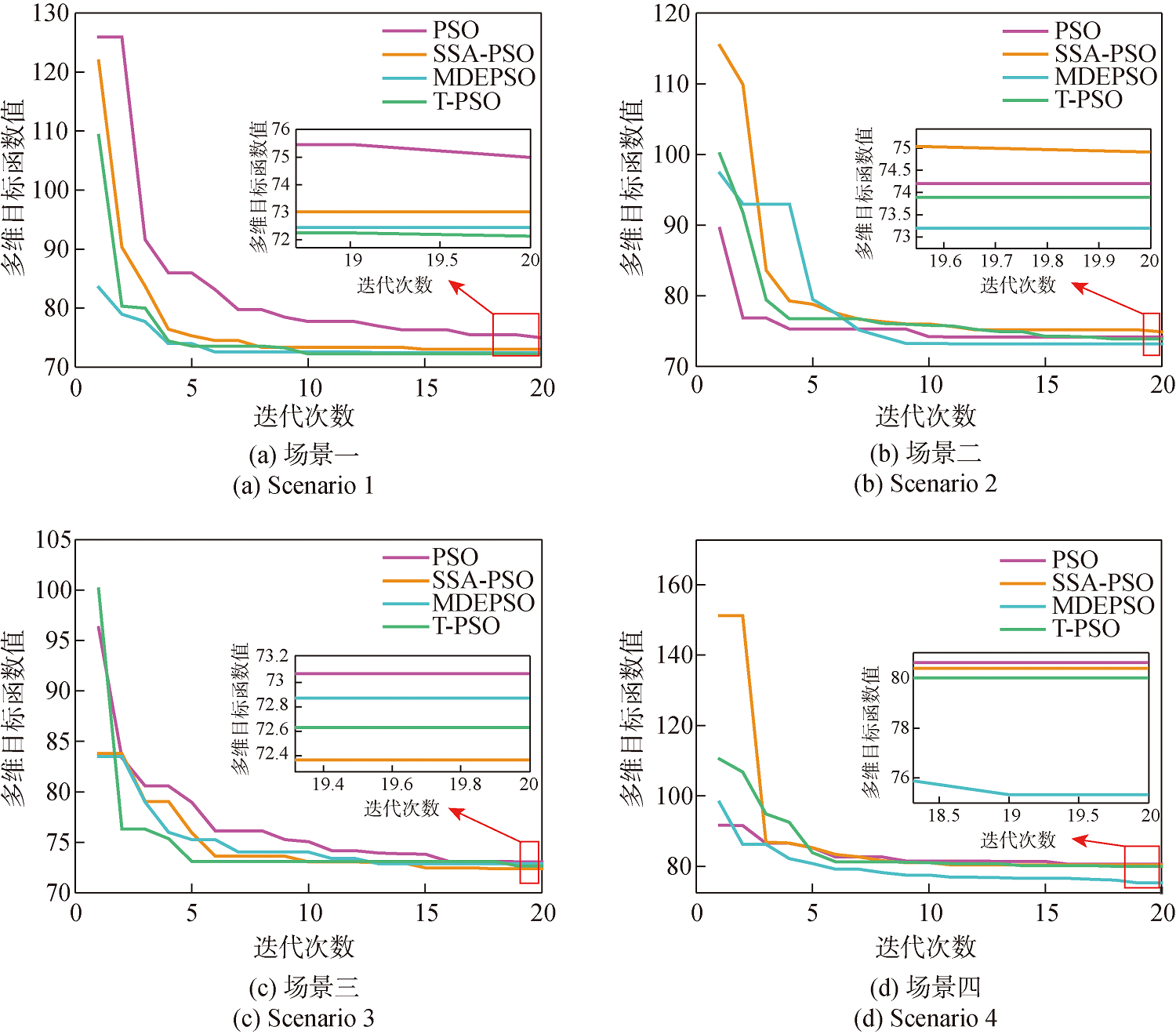
Fig.8 Multidimensional objective function iteration curve of each scene
| [1] |
秦潜聪, 吴冠霖, 高原, 等. 面向战场条件的无人机集群分布式存储方法[J]. 西南交通大学学报, 2024, 59(4):942-958.
|
|
|
|
| [2] |
|
| [3] |
张海阔, 孟秀云. 基于改进RRT*算法的无人机在线航迹规划[J]. 系统工程与电子技术, 2024, 46(12):4157-4164.
doi: 10.12305/j.issn.1001-506X.2024.12.24 |
|
|
|
| [4] |
李宗刚, 韩森, 陈引娟, 等. 基于角度搜索和深度Q网络的移动机器人路径规划算法[J]. 兵工学报, 2025, 46(2):240265.
doi: 10.12382/bgxb.2024.0265 |
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
DE CARVALHO A B,
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
张志文, 刘伯威, 张继园, 等. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(6):993-999,1009.
|
|
|
|
| [17] |
张睿, 李万睿, 肖勇, 等. 基于航迹规划的无人机地形辅助导航[J]. 哈尔滨工程大学学报, 2024, 45(3):459-465.
|
|
|
|
| [18] |
陈亚萍, 王楠, 洪华杰, 等. 面向多无人平台区域监视任务的信息素正向激励栅格方法[J]. 兵工学报, 2023, 44(9):2859-2870.
doi: 10.12382/bgxb.2022.0537 |
|
doi: 10.12382/bgxb.2022.0537 |
|
| [19] |
|
| [20] |
黄樊晶, 吴盘龙, 李星秀, 等. 考虑执行能力约束的多机协同目标分配AEPSO算法[J]. 宇航学报, 2024, 45(6):948-957.
|
|
|
|
| [21] |
|
| [22] |
薛阳, 燕宇铖, 贾巍, 等. 基于改进灰狼算法优化长短期记忆网络的光伏功率预测[J]. 太阳能学报, 2023, 44(7):207-213.
doi: 10.19912/j.0254-0096.tynxb.2022-0320 |
|
doi: 10.19912/j.0254-0096.tynxb.2022-0320 |
| [1] | SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing [J]. Acta Armamentarii, 2025, 46(7): 240797-. |
| [2] | QIN Taotao, JI Siyuan, LEI Lin, ZHENG Zhanfeng. Non-parametric Modelling and Muzzle Velocity Prediction of Multi-stage Induction Coilgun based on PSO-RNN Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240616-. |
| [3] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [4] | WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination [J]. Acta Armamentarii, 2025, 46(7): 240575-. |
| [5] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [6] | WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net [J]. Acta Armamentarii, 2025, 46(5): 240743-. |
| [7] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [8] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [9] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [10] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [11] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [12] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [13] | LIU Cong, LI Baiqing, ZHANG Zongwei, SHAN Zezhong. Investigation of Multi-dimensional Aerodynamic Characteristics of UAV Rotor Subjected to Horizontal Inflow [J]. Acta Armamentarii, 2025, 46(3): 240316-. |
| [14] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [15] | HOU Peng, GE Yuxue, PEI Yang, YUE Yuan, AI Junqiang. UAV Air-to-ground Attack Task Assignment Method Based on Damage Assessment Results [J]. Acta Armamentarii, 2025, 46(2): 240212-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||