
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (7): 240653-.doi: 10.12382/bgxb.2024.0653
Previous Articles Next Articles
XU Yang, WEI Chao, FENG Fuyong, HU Leyun
Received:2024-07-31
Online:2025-08-12
CLC Number:
XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning[J]. Acta Armamentarii, 2025, 46(7): 240653-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Overview diagram of spatio-temporal decomposition planning method
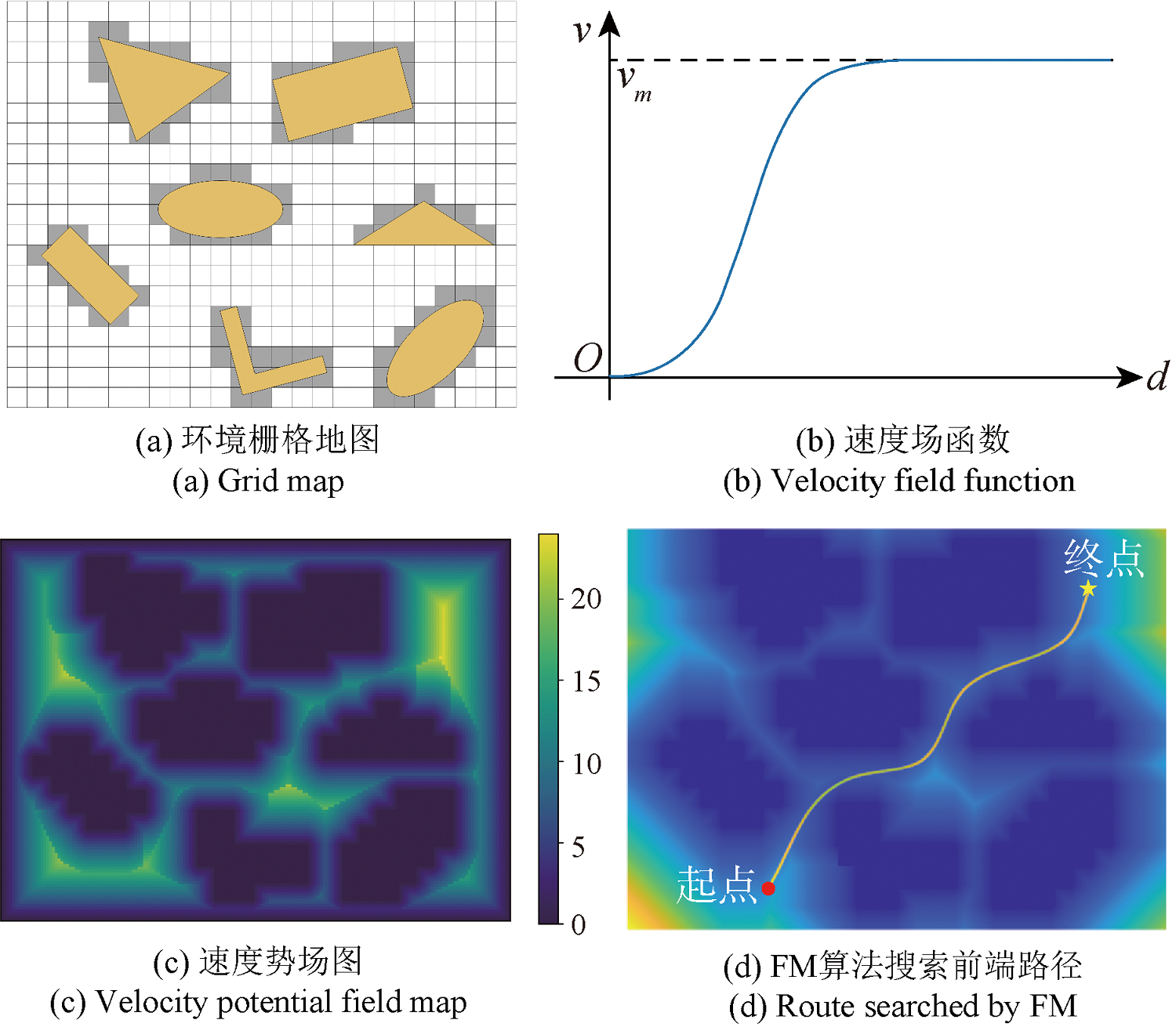
Fig.2 Overview of the Fast Marching algorithm

Fig.3 Schematic diagram of the safe corridor generation process

Fig.4 Spatial trajectory generation strategy

Fig.5 Discretization process of segmented trajectories
| 飞行器参数 | 指标明细 |
|---|---|
| 无人机类型 | 四旋翼无人机 |
| 最大起飞重量/kg | 4 |
| 机架类型 | X型 |
| 轴距/mm | 600 |
| 挂载传感器 | 双目深度相机、光电吊舱等 |
| 最大平飞速度/(m·s-1) | 15 |
Table 1 Detailed parameters of UAV test platform
| 飞行器参数 | 指标明细 |
|---|---|
| 无人机类型 | 四旋翼无人机 |
| 最大起飞重量/kg | 4 |
| 机架类型 | X型 |
| 轴距/mm | 600 |
| 挂载传感器 | 双目深度相机、光电吊舱等 |
| 最大平飞速度/(m·s-1) | 15 |

Fig.6 Static landing simulation environment

Fig.7 Static autonomous landing simulation results
| 测试算法 | STCP | STDP |
|---|---|---|
| 任务耗时/s | 19.2 | 7.9 |
| 平均速度/(m·s-1) | 0.84 | 1.82 |
| 平均加速度/(m·s-2) | 0.46 | 1.25 |
| 最大速度/(m·s-1) | 1.18 | 2.77 |
| 最大加速度/(m·s-2) | 0.43 | 2.36 |
Table 2 Comparative experimental simulation results of static autonomous landing
| 测试算法 | STCP | STDP |
|---|---|---|
| 任务耗时/s | 19.2 | 7.9 |
| 平均速度/(m·s-1) | 0.84 | 1.82 |
| 平均加速度/(m·s-2) | 0.46 | 1.25 |
| 最大速度/(m·s-1) | 1.18 | 2.77 |
| 最大加速度/(m·s-2) | 0.43 | 2.36 |
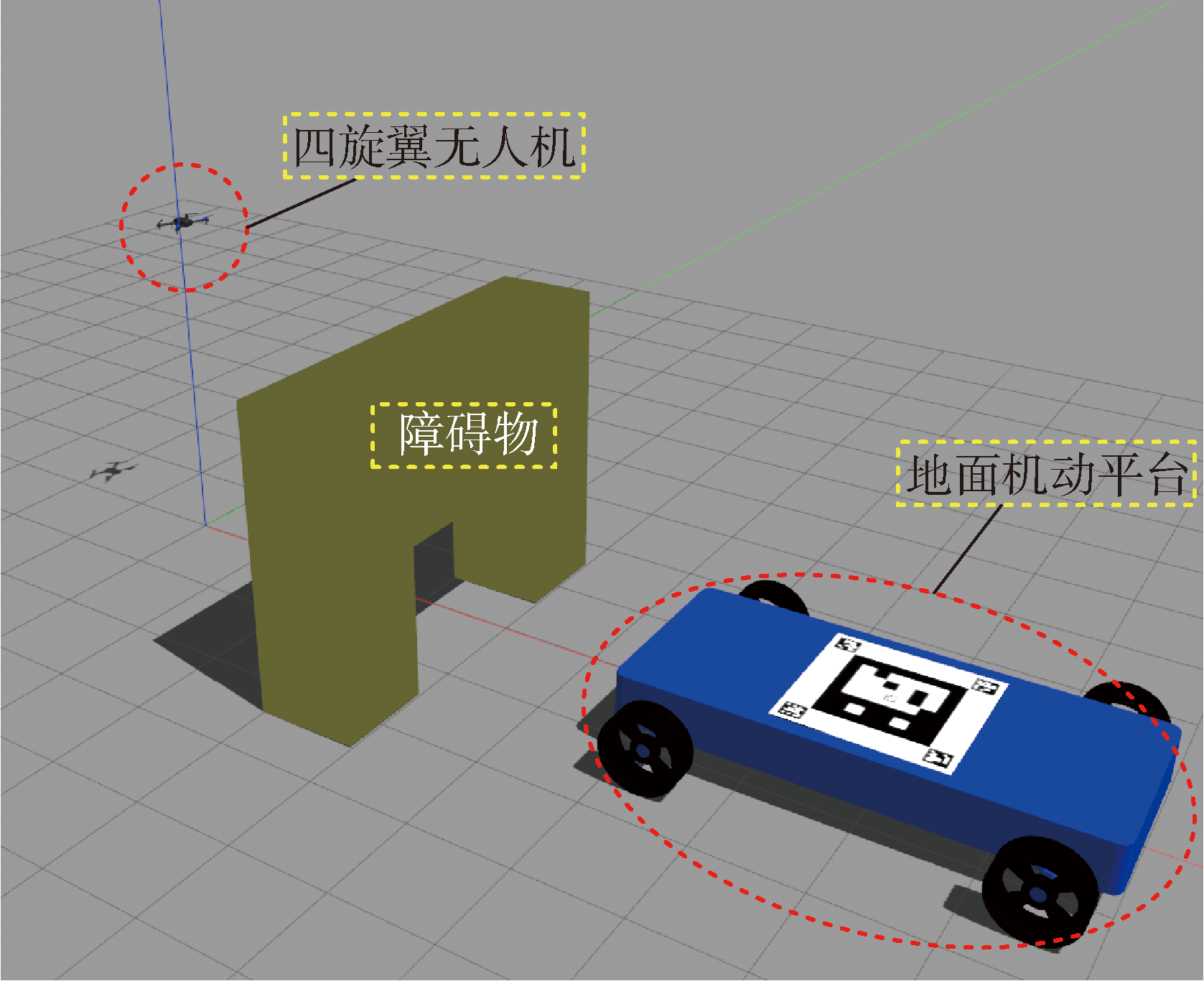
Fig.8 Dynamic autonomous landing simulation scenario

Fig.9 Dynamic autonomous landing simulation results
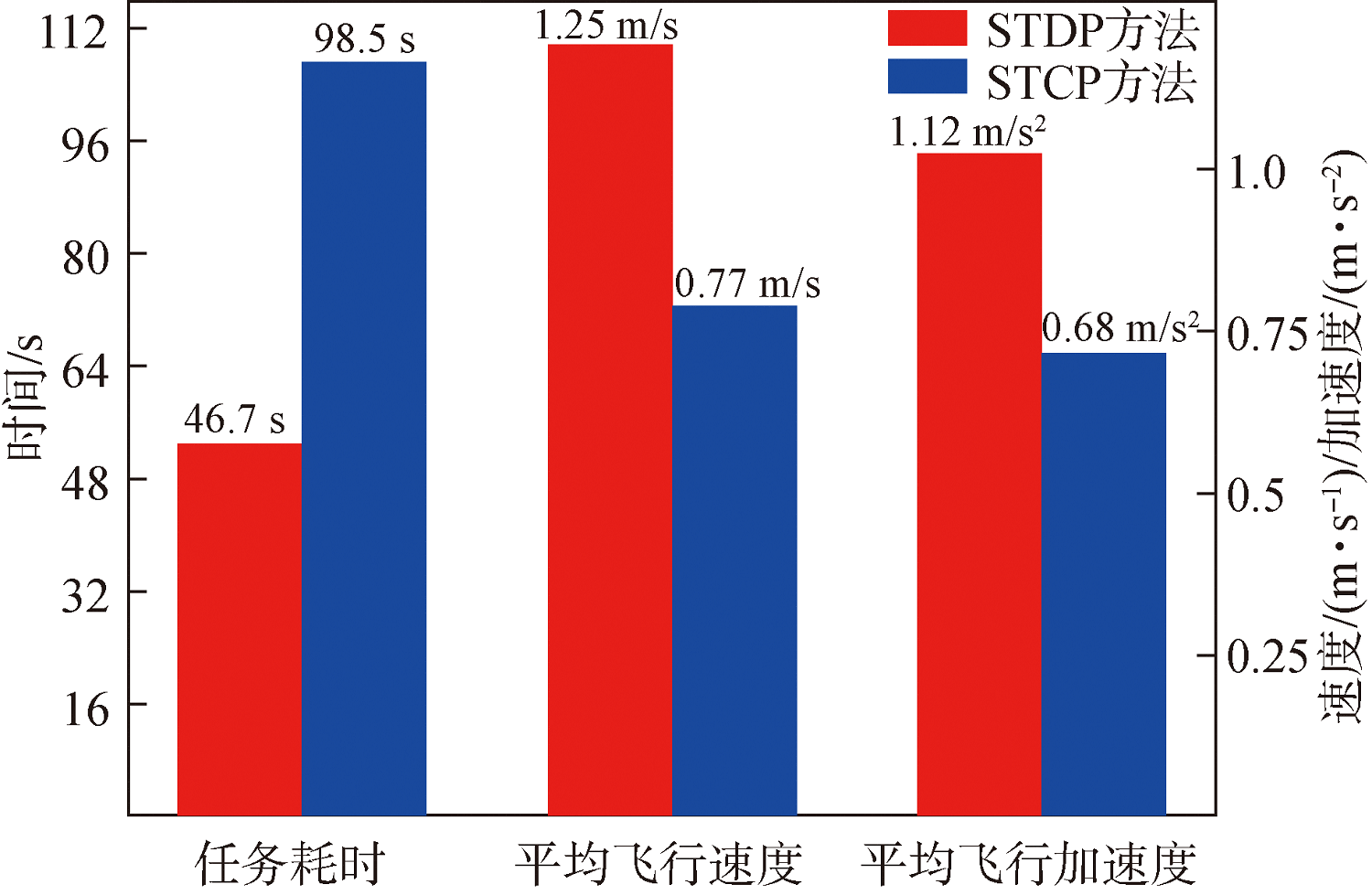
Fig.10 Comparative experimental results of dynamic autonomous landing

Fig.11 The experimental equipment in real-world applications

Fig.12 Static landing test in real-world applications

Fig.13 Dynamic landing test in real-world applications
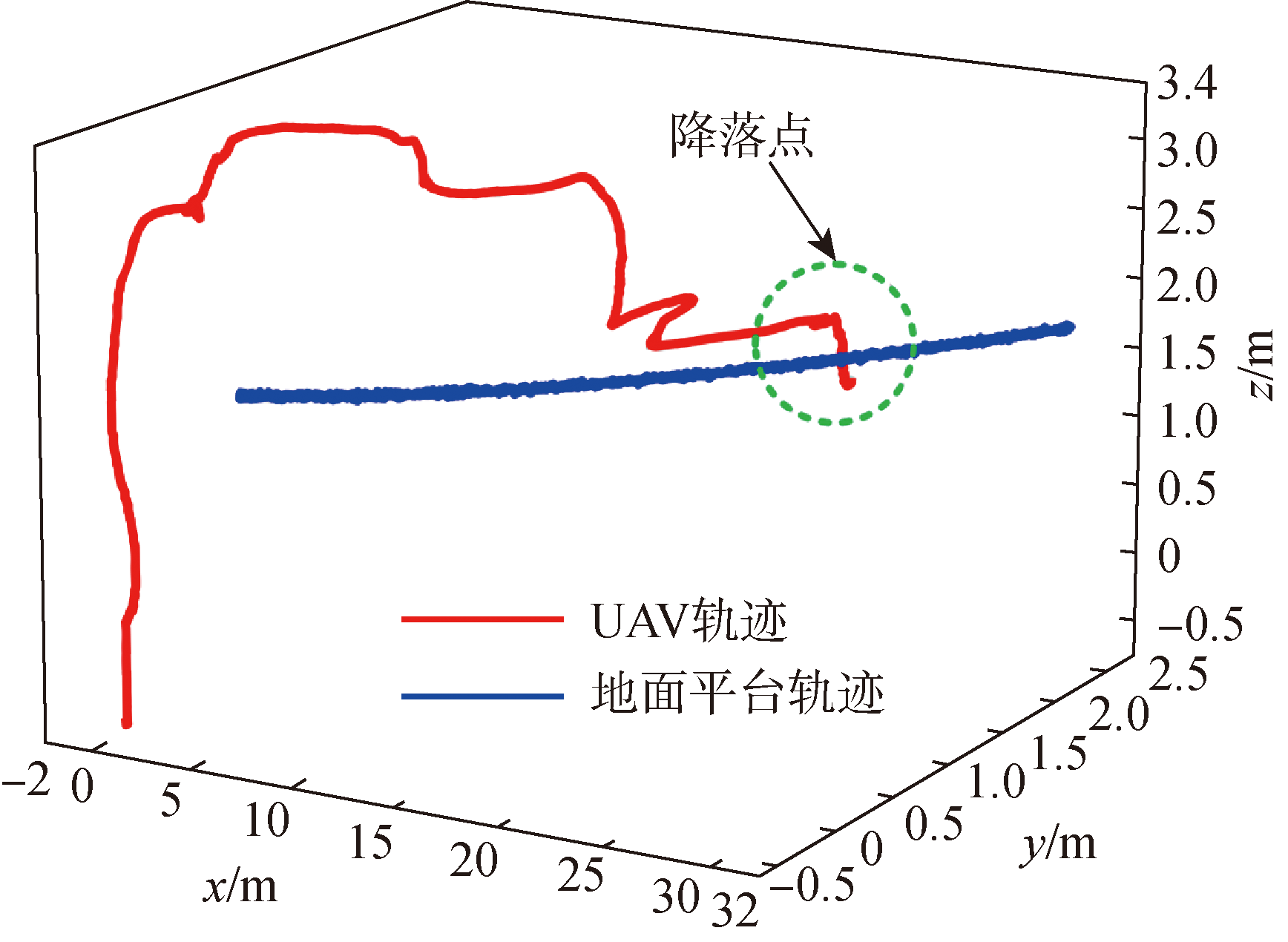
Fig.14 UAV 3D flight trajectory and UGV trajectory
| [1] |
叶立威, 吴钧皓, 戚远航, 等. 改进混合粒子群算法求解带时间窗的无人机与车辆协同路径调度问题[J]. 计算机应用研究, 2024, 41(8):2336-2342.
|
|
|
|
| [2] |
|
| [3] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7):1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [1] | QIN Boyu, ZHANG Dong, TANG Shuo. A Discussion on Key Issues and Technologies of Aircraft Swarm Safety Control [J]. Acta Armamentarii, 2025, 46(4): 240215-. |
| [2] | HE Yang, LI Gang. Research on Trajectory Planning Control Method of Intelligent Vehicle Based on Velocity Obstacle Model [J]. Acta Armamentarii, 2025, 46(4): 240058-. |
| [3] | LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation [J]. Acta Armamentarii, 2025, 46(3): 240362-. |
| [4] | NAN Wenjiang, YAN Xunliang, YANG Yuxuan, WANG Peichen. Rapid Planning of Longitudinal-lateral Comprehensive Control Reentry Gliding Trajectory Considering Time Constraints [J]. Acta Armamentarii, 2025, 46(3): 240154-. |
| [5] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [6] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [7] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [8] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [9] | DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft [J]. Acta Armamentarii, 2024, 45(11): 3903-3914. |
| [10] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [11] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [12] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [13] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [14] | TANG Chuan-lin,HUANG Chang-qiang,DU Hai-wen,HUANG Han-qiao,DING Da-li,LUO Chang. Study of Trajectory Planning for UCAV Formation Cooperative Attack [J]. Acta Armamentarii, 2014, 35(4): 523-530. |
| [15] | CHEN Guo-da, JI Shi-ming, JIN Ming-sheng, ZHANG Cai. Layering Shaping Mould Gasbag Polishing Trajectory Planning Method for Equal Residual Figure Error [J]. Acta Armamentarii, 2012, 33(6): 724-729. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||