
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (7): 240797-.doi: 10.12382/bgxb.2024.0797
Previous Articles Next Articles
SHEN Ying1, ZHANG Shuo1, WANG Shu1, SU Yun2, XUE Fang2, HUANG Feng1,*( )
)
Received:2024-09-04
Online:2025-08-12
Contact:
HUANG Feng
SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing[J]. Acta Armamentarii, 2025, 46(7): 240797-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Overall Architecture of PCSOD-YOLO network
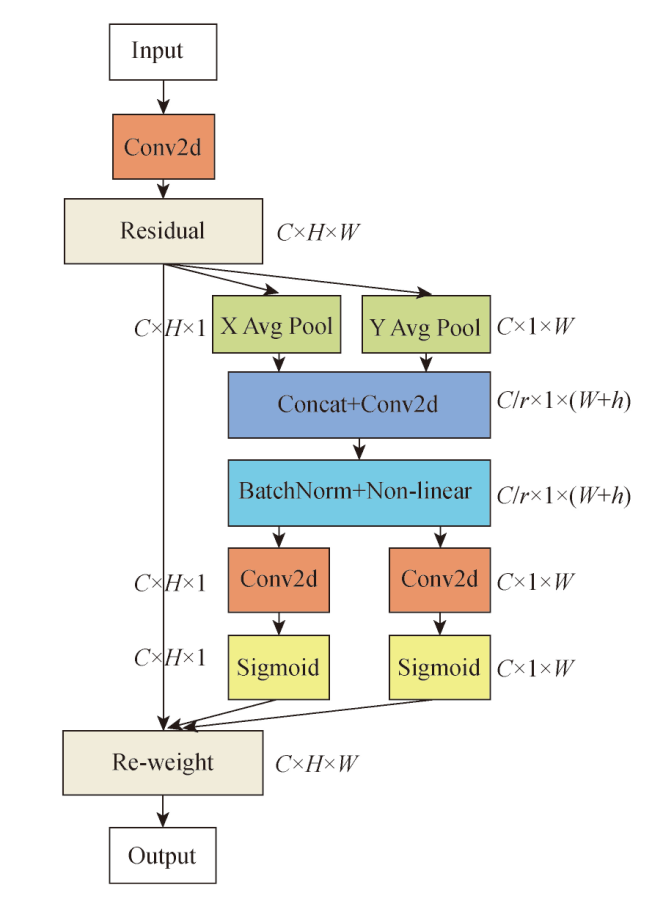
Fig.2 Structure diagram of position-aware coordinate convolution CAConv2d
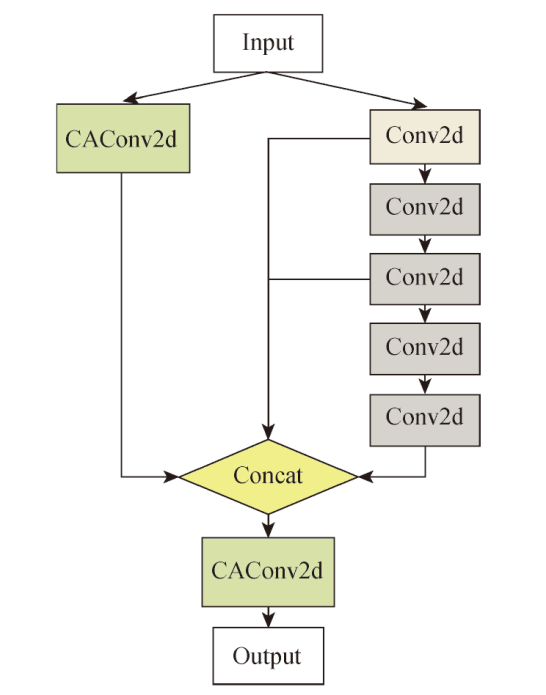
Fig.3 Structure diagram of efficient feature extraction module ELAM-CA
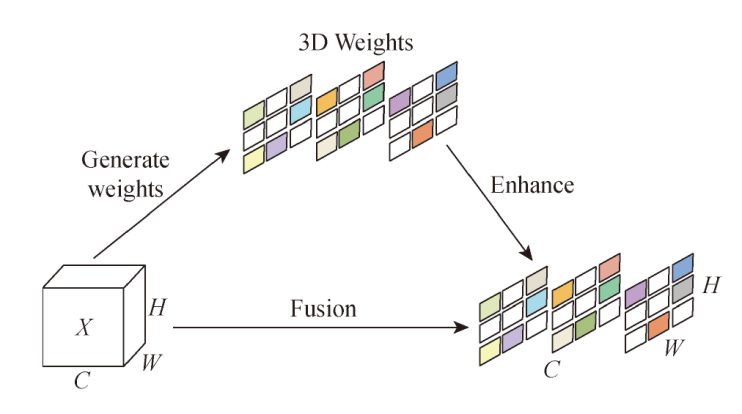
Fig.4 Structure diagram of SimAM attention mechanism
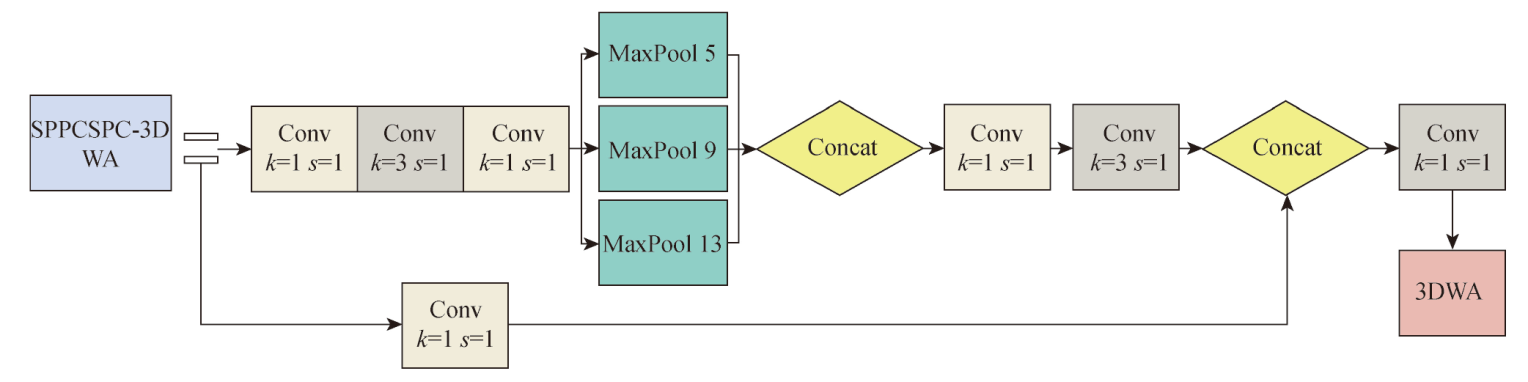
Fig.5 Structure diagram of receptive field module
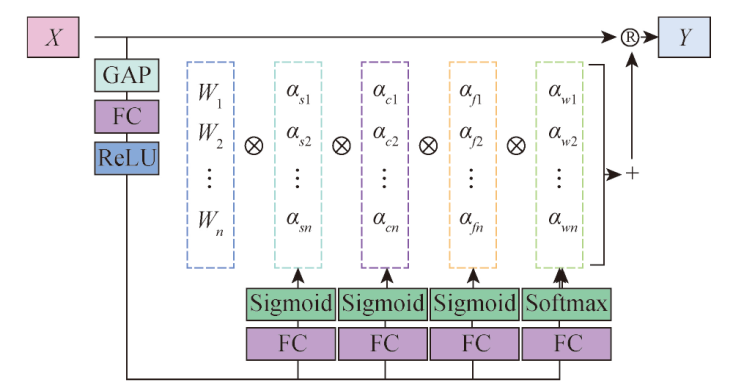
Fig.6 Processing of full-dimensional dynamic convolution
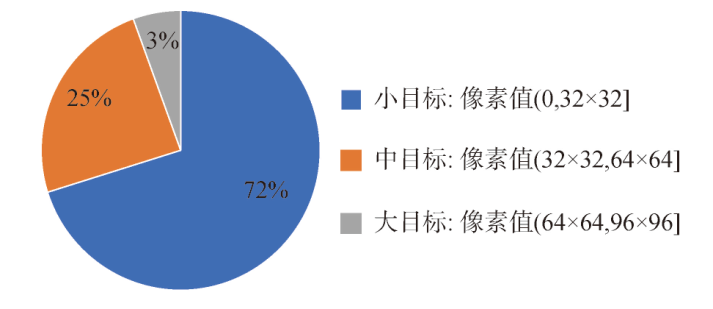
Fig.7 Distribution ratio of the number of large,medium, and small targets in the PICSO dataset
| 目标类别 | 训练集 | 验证集 | 测试集 |
|---|---|---|---|
| Military vehicle I | 1127 | 140 | 145 |
| Missile vehicle II | 241 | 28 | 30 |
| Camouflage board | 554 | 73 | 55 |
| Jeep | 253 | 36 | 34 |
| Person | 431 | 48 | 55 |
Table 1 Polarization camouflaged small target dataset
| 目标类别 | 训练集 | 验证集 | 测试集 |
|---|---|---|---|
| Military vehicle I | 1127 | 140 | 145 |
| Missile vehicle II | 241 | 28 | 30 |
| Camouflage board | 554 | 73 | 55 |
| Jeep | 253 | 36 | 34 |
| Person | 431 | 48 | 55 |
| 探测角 度/(°) | S0图像 | DoLp图像 | Is图像 | 偏振编码图像 | 局部放大图 |
|---|---|---|---|---|---|
| 45 | | | | | |
| 90 | | | | | |
Table 2 Comparison of the same target under different imaging conditions
| 探测角 度/(°) | S0图像 | DoLp图像 | Is图像 | 偏振编码图像 | 局部放大图 |
|---|---|---|---|---|---|
| 45 | | | | | |
| 90 | | | | | |
| 高度/m | 军事车辆Ⅰ | 军事车辆Ⅱ | 伪装板 | 吉普车 | 伪装人 |
|---|---|---|---|---|---|
| H30 | | | | | |
| H50 | | | | | |
| H70 | | | | | |
Table 3 Polarization encoded images of camouflaged small target
| 高度/m | 军事车辆Ⅰ | 军事车辆Ⅱ | 伪装板 | 吉普车 | 伪装人 |
|---|---|---|---|---|---|
| H30 | | | | | |
| H50 | | | | | |
| H70 | | | | | |
| 网络结构 | mAP0.5/% | mAP0.5:0.95/% | FPS/(帧/s) |
|---|---|---|---|
| FCOS | 47.5 | 18.6 | 53.1 |
| YOLOV5 | 77.9 | 30.6 | 74.4 |
| YOLOX | 79.5 | 31.9 | 69.7 |
| YOLOV7 | 84.7 | 42.8 | 76.9 |
| YOLOV8 | 87.7 | 34.8 | 108.0 |
| PCSOD-YOLO | 92.4 | 47.8 | 60.6 |
Table 4 Comparison of test results of different models
| 网络结构 | mAP0.5/% | mAP0.5:0.95/% | FPS/(帧/s) |
|---|---|---|---|
| FCOS | 47.5 | 18.6 | 53.1 |
| YOLOV5 | 77.9 | 30.6 | 74.4 |
| YOLOX | 79.5 | 31.9 | 69.7 |
| YOLOV7 | 84.7 | 42.8 | 76.9 |
| YOLOV8 | 87.7 | 34.8 | 108.0 |
| PCSOD-YOLO | 92.4 | 47.8 | 60.6 |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
Table 5 Partial enlarged views of the detection results of different models at height of 30m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
Table 6 Partial enlarged views of the detected results of different models at height of 50m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
Table 7 Partial enlarged views of the detected results of different models at height of 70m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 序 号 | 预训练 权重 | 小目标 检测头 | 特征提 取模块 | 感受野 模块 | mAP0.5/ % | 参数量/ MB |
|---|---|---|---|---|---|---|
| 1 | √ | 84.7 | 36.5 | |||
| 2 | √ | √ | 87.4 | 36.5 | ||
| 3 | √ | √ | 89.3 | 36.7 | ||
| 4 | √ | √ | 89.2 | 37.0 | ||
| 5 | √ | √ | √ | 90.9 | 37.2 | |
| 6 | √ | √ | √ | 91.0 | 37.0 | |
| 7 | √ | √ | √ | 91.6 | 36.5 | |
| 8 | √ | √ | √ | √ | 92.4 | 37.2 |
Table 8 Results of ablation experiment
| 序 号 | 预训练 权重 | 小目标 检测头 | 特征提 取模块 | 感受野 模块 | mAP0.5/ % | 参数量/ MB |
|---|---|---|---|---|---|---|
| 1 | √ | 84.7 | 36.5 | |||
| 2 | √ | √ | 87.4 | 36.5 | ||
| 3 | √ | √ | 89.3 | 36.7 | ||
| 4 | √ | √ | 89.2 | 37.0 | ||
| 5 | √ | √ | √ | 90.9 | 37.2 | |
| 6 | √ | √ | √ | 91.0 | 37.0 | |
| 7 | √ | √ | √ | 91.6 | 36.5 | |
| 8 | √ | √ | √ | √ | 92.4 | 37.2 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
胡焱, 原子昊, 涂晓光, 等. 基于对比学习的改进SSD目标检测算法[J]. 红外技术, 2024, 46(5):548-555.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
肖振久, 张杰浩, 林渤翰. 特征协同与细粒度感知的遥感图像小目标检测[J]. 光电工程, 2024, 51(6):52-65.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
郭永红, 牛海涛, 史超, 等. 基于卷积和注意力机制的小样本目标检测[J]. 兵工学报, 2023, 44(11):3508-3515.
doi: 10.12382/bgxb.2022.1167 |
|
doi: 10.12382/bgxb.2022.1167 |
|
| [18] |
|
| [19] |
doi: 10.1364/OE.390385 pmid: 32403811 |
| [20] |
|
| [21] |
沈英, 刘贤财, 王舒, 等. 基于偏振编码图像的低空伪装目标实时检测[J]. 兵工学报, 2024, 45(5):1374-1383.
doi: 10.12382/bgxb.2022.1289 |
|
doi: 10.12382/bgxb.2022.1289 |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
惠康华, 杨卫, 刘浩翰, 等. 基于YOLOv5的增强多尺度目标检测方法[J]. 兵工学报, 2023, 44(9):2600-2610.
doi: 10.12382/bgxb.2022.1147 |
|
|
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [1] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [2] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [3] | QIN Yuemei, CHEN Zhong, YANG Yanbo, LI Shuying. Joint State Equality Constraint Identification and Recursive Filtering Based on Deep Learning [J]. Acta Armamentarii, 2025, 46(6): 240578-. |
| [4] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [5] | SUN Shiyan, LI Lin, ZHU Huimin, SHI Zhangsong, LIANG Weige. Intelligent Recognition of Flight Pattern Based on IFPRM-SBLFS Deep Learning [J]. Acta Armamentarii, 2025, 46(5): 240893-. |
| [6] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [7] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [8] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [9] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [10] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [11] | LIU Cong, LI Baiqing, ZHANG Zongwei, SHAN Zezhong. Investigation of Multi-dimensional Aerodynamic Characteristics of UAV Rotor Subjected to Horizontal Inflow [J]. Acta Armamentarii, 2025, 46(3): 240316-. |
| [12] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [13] | ZHANG Xinze, XIAO Haijian, LIU Xinglong, XING Kongrui, LU Xiang. Design and Realization of a Ducted Fan Water-air Amphibious UAV [J]. Acta Armamentarii, 2025, 46(1): 231172-. |
| [14] | FENG Yingbin, GUO Xiaozun, YAN Jiahua. Small UVA Target Detection Algorithm Based on Multi-scale Attention Mechanism [J]. Acta Armamentarii, 2025, 46(1): 231124-. |
| [15] | SUN Xichen, LI Weibing, HUANG Changwei, FU Jiawei, FENG Jun. Multi-step-ahead Prediction of Grenade Trajectory Based on CNN-LSTM Enhanced by Deep Learning and Self-attention Mechanism [J]. Acta Armamentarii, 2024, 45(S1): 51-59. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||