
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 4175-4190.doi: 10.12382/bgxb.2024.0485
WANG Bin1,2, ZHANG Jianshu1,2,*( ), DUAN Zhifeng1,2, YUE Qixing1,2, GANG Kuankuan1,2, MIAO Yangyang1,2
), DUAN Zhifeng1,2, YUE Qixing1,2, GANG Kuankuan1,2, MIAO Yangyang1,2
Received:2024-06-19
Online:2024-11-26
Contact:
ZHANG Jianshu
CLC Number:
WANG Bin, ZHANG Jianshu, DUAN Zhifeng, YUE Qixing, GANG Kuankuan, MIAO Yangyang. Dynamics Modeling and Stability Control of Marching Tank Gun Control System[J]. Acta Armamentarii, 2024, 45(11): 4175-4190.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 TGCS coordinate system

Fig.2 Simplified model of azimuth drive mechanism
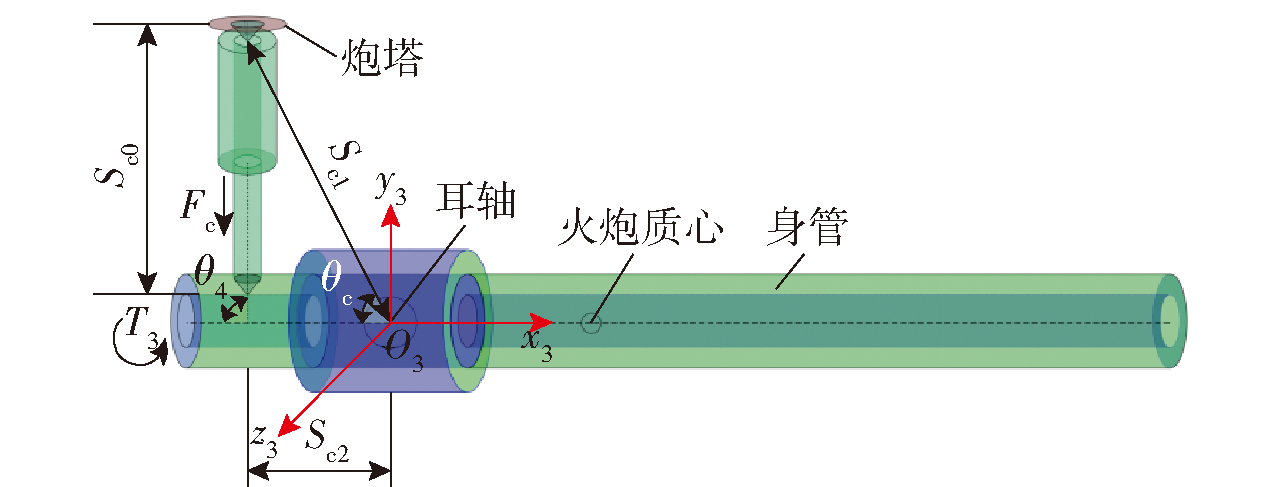
Fig.3 Schematic diagram of elevation drive mechanism
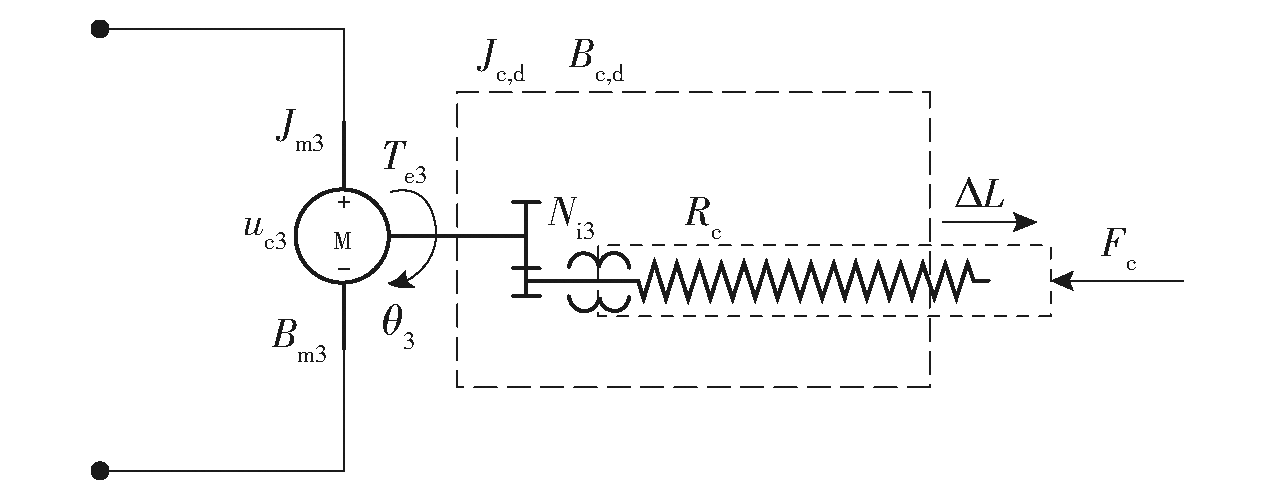
Fig.4 Simplified model of elevation drive mechanism
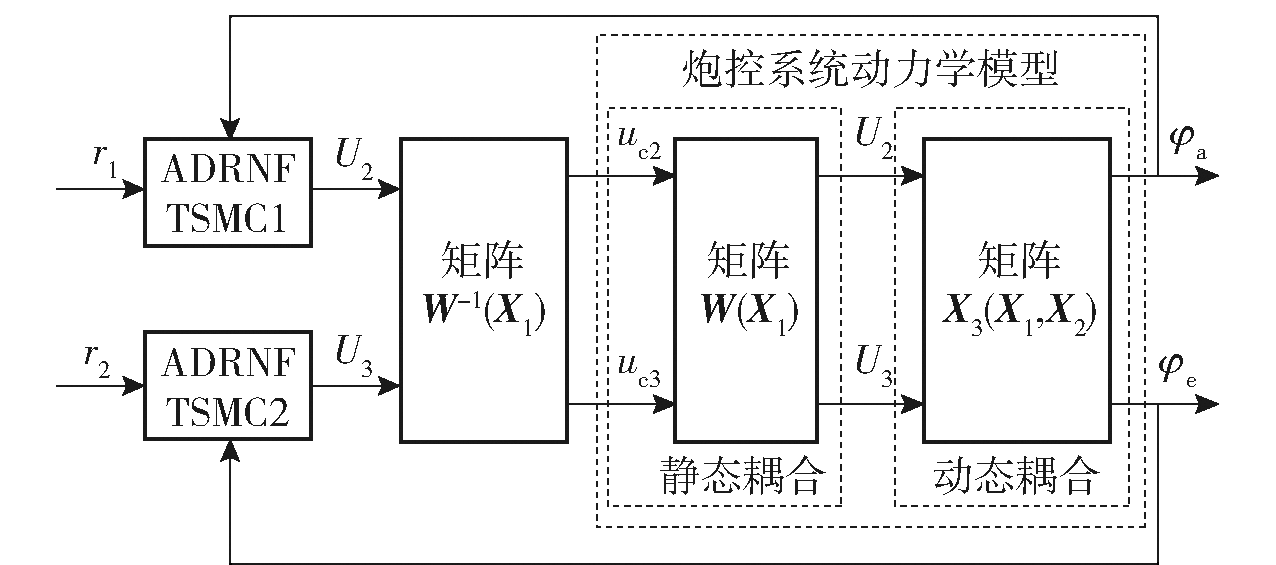
Fig.5 TGCS decoupling structure diagram
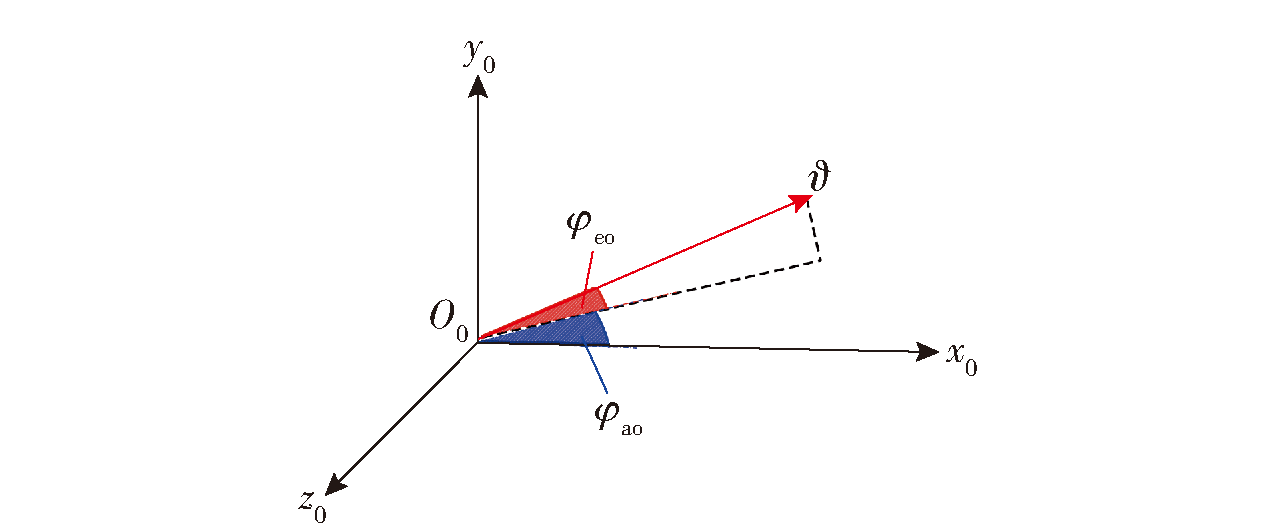
Fig.6 Azimuth of gunaxis in global inertial coordinate system
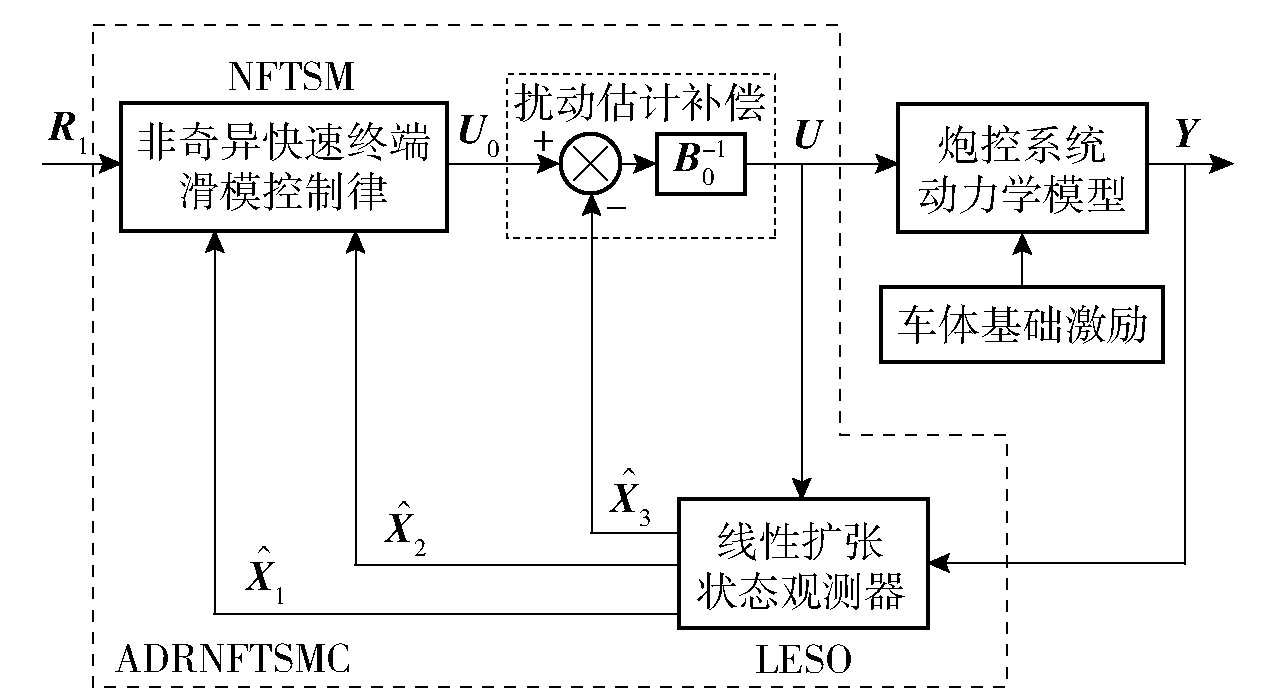
Fig.7 TGCS structure diagram
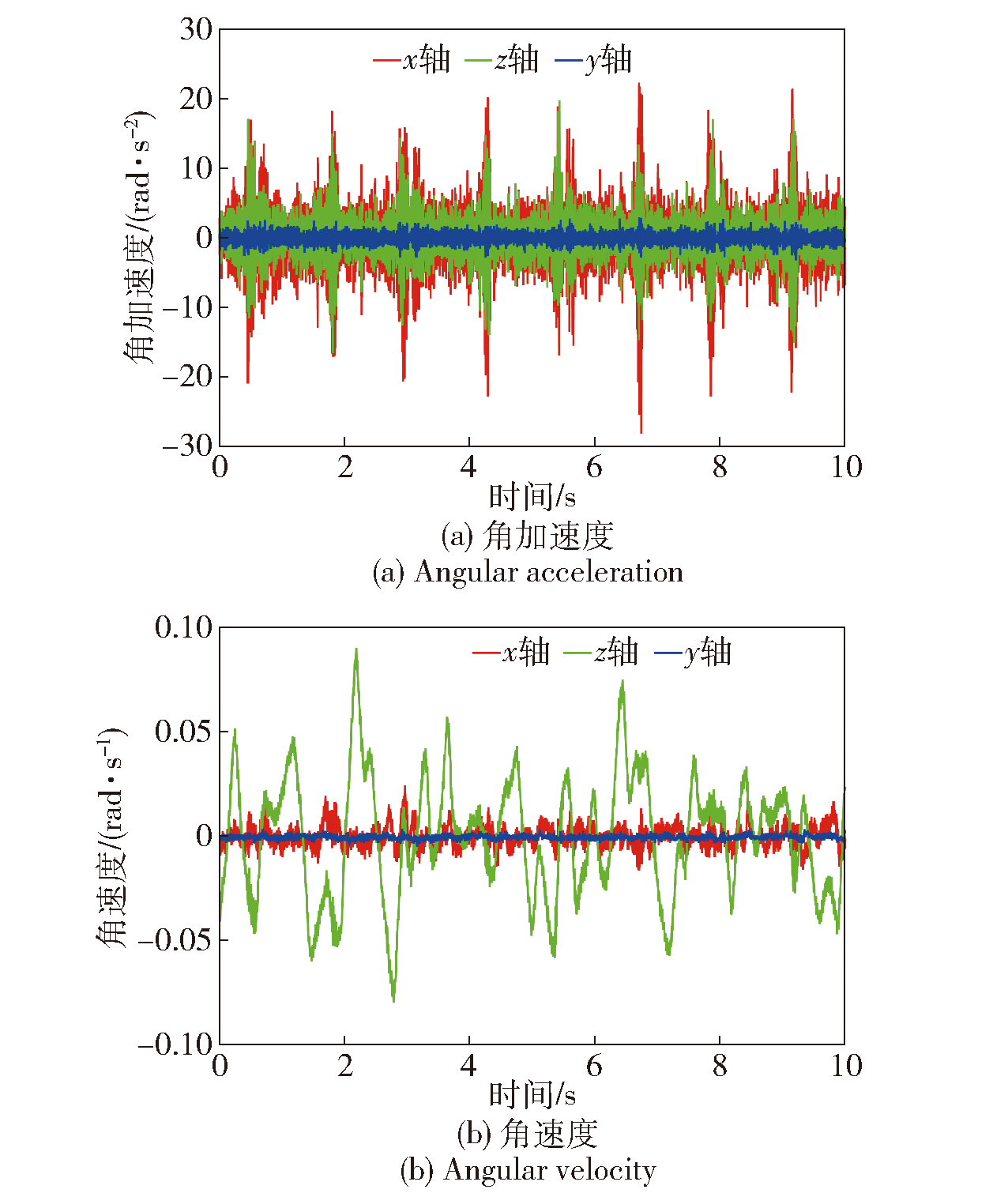
Fig.8 Fundamental vehicular excitation while marching at a speed of 20km/h
| 统计值 | 坐标轴 | 车速/(km·h-1) | ||
|---|---|---|---|---|
| 20 | 25 | 30 | ||
| x | 3.0387 | 3.1277 | 3.2677 | |
| 角加速度/(rad·s-2) | z | 2.1688 | 2.3016 | 2.3042 |
| y | 0.5773 | 0.6177 | 0.7388 | |
| x | 0.0049 | 0.0051 | 0.0053 | |
| 角速度/(rad·s-1) | z | 0.0285 | 0.0360 | 0.0421 |
| y | 0.0011 | 0.0012 | 0.0014 | |
Table 1 Comparison of the RMS fundamental vehicular excitations at different speeds on D-level road
| 统计值 | 坐标轴 | 车速/(km·h-1) | ||
|---|---|---|---|---|
| 20 | 25 | 30 | ||
| x | 3.0387 | 3.1277 | 3.2677 | |
| 角加速度/(rad·s-2) | z | 2.1688 | 2.3016 | 2.3042 |
| y | 0.5773 | 0.6177 | 0.7388 | |
| x | 0.0049 | 0.0051 | 0.0053 | |
| 角速度/(rad·s-1) | z | 0.0285 | 0.0360 | 0.0421 |
| y | 0.0011 | 0.0012 | 0.0014 | |
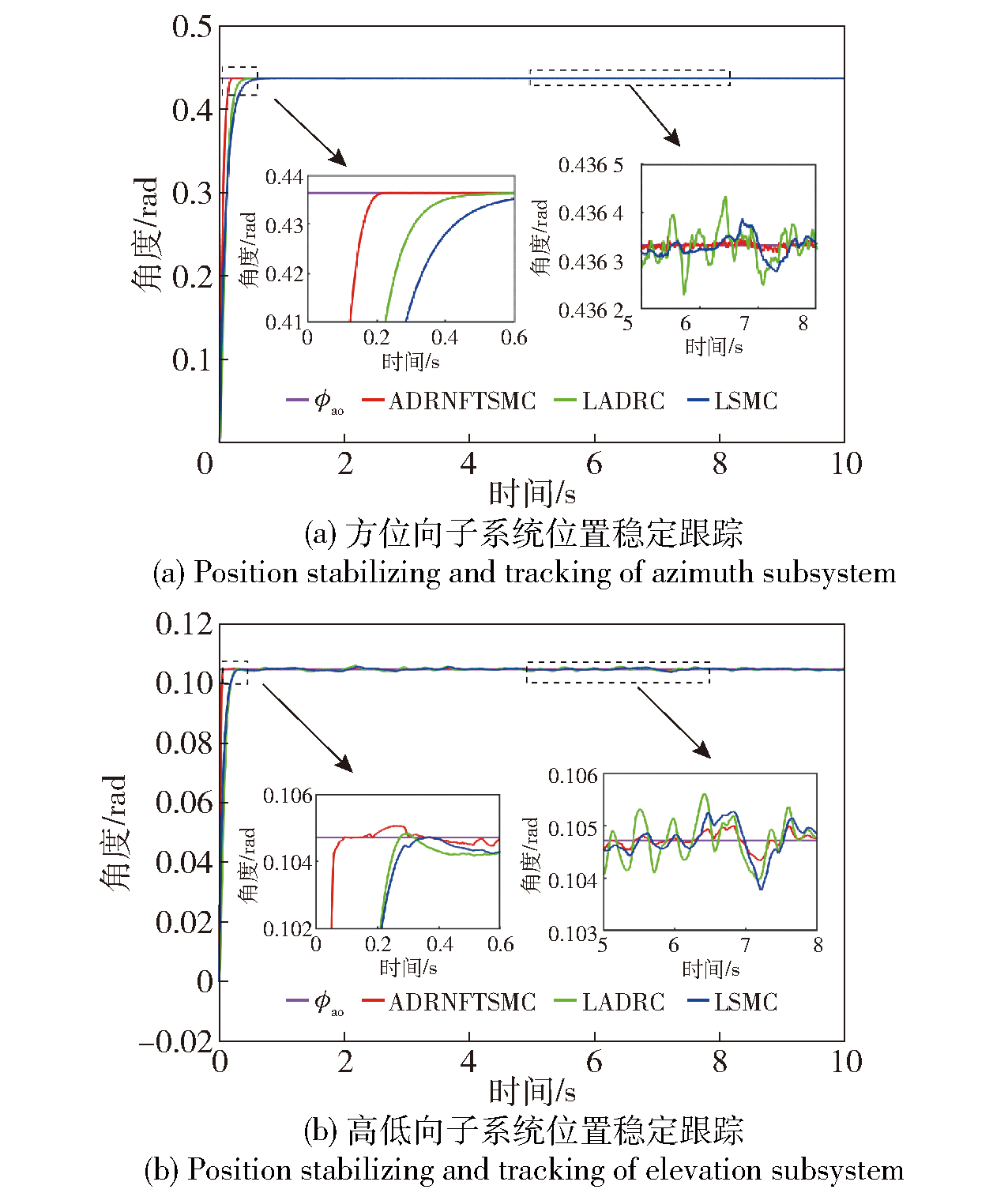
Fig.9 Position stabilizing and tracking of TGCS in Case 1
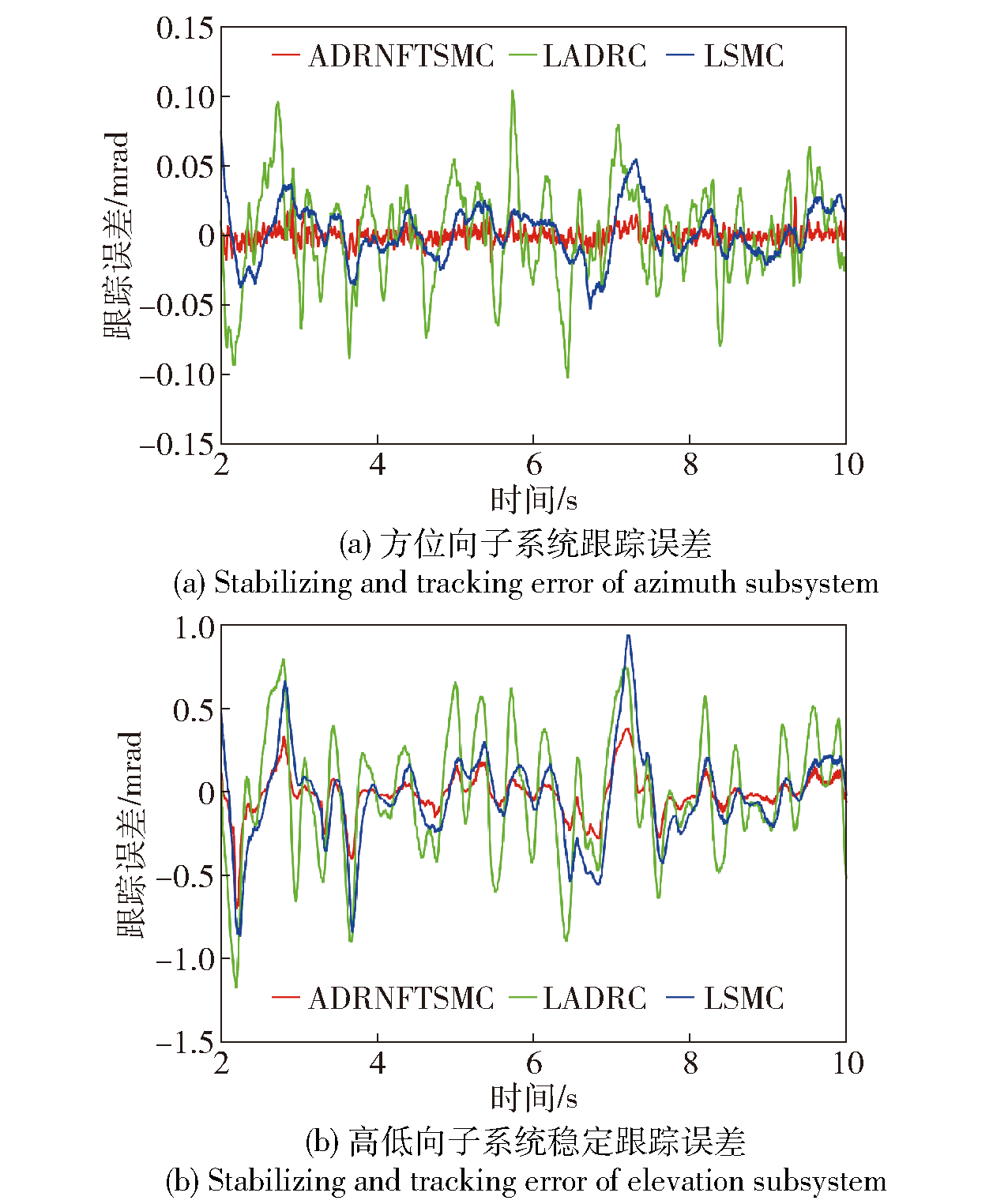
Fig.10 Stabilizing and tracking error of TGCS in Case 1
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | LSMC | ||
| σ/mrad | 方位 | 0.0041 | 0.0279 | 0.0154 |
| 高低 | 0.0858 | 0.2969 | 0.1970 | |
| τ/s | 方位 | 0.2135 | 0.5760 | 0.8750 |
| 高低 | 0.0880 | 0.6470 | 0.7120 | |
Table 2 Comparison of the system simulation results in Case 1
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | LSMC | ||
| σ/mrad | 方位 | 0.0041 | 0.0279 | 0.0154 |
| 高低 | 0.0858 | 0.2969 | 0.1970 | |
| τ/s | 方位 | 0.2135 | 0.5760 | 0.8750 |
| 高低 | 0.0880 | 0.6470 | 0.7120 | |
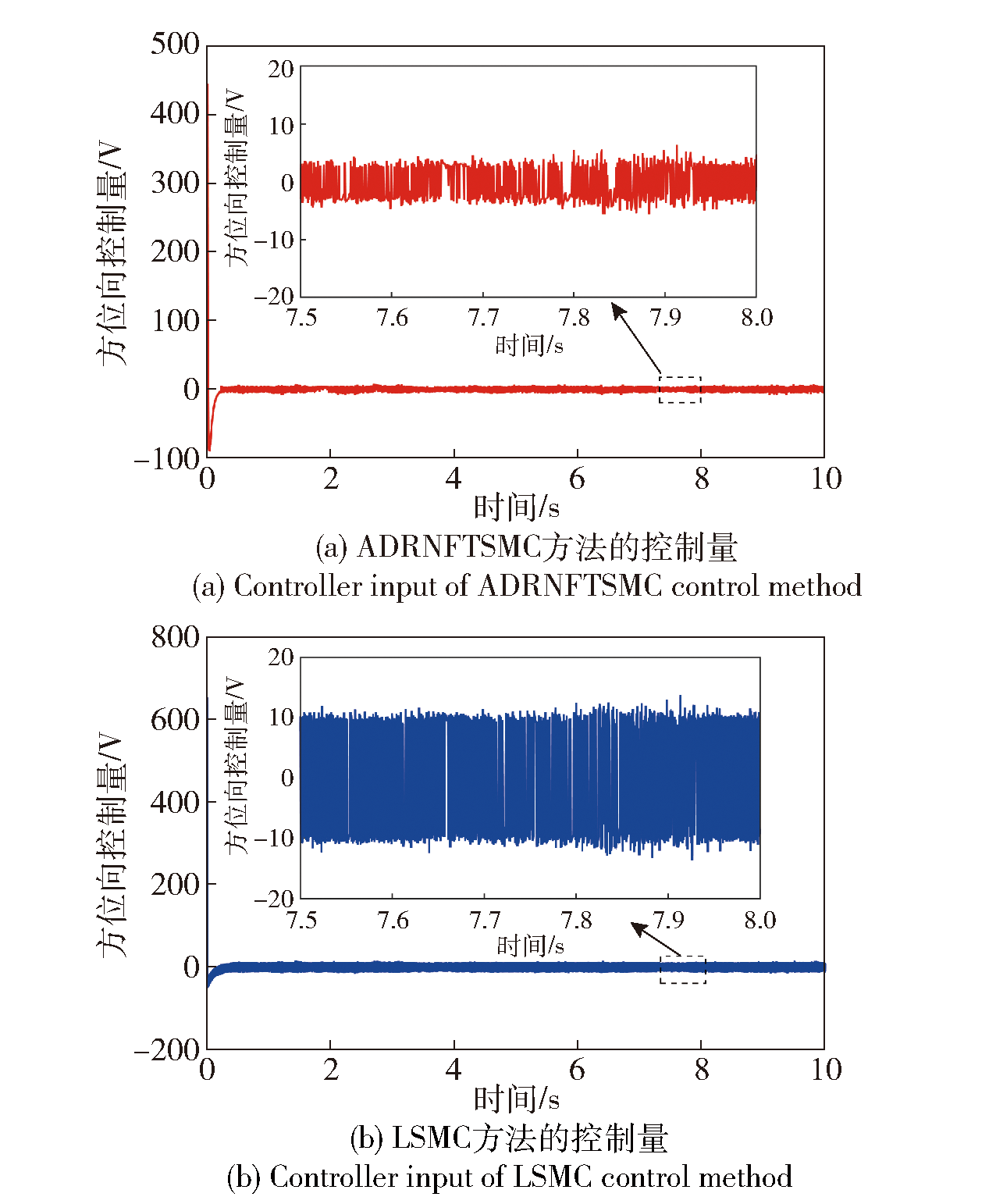
Fig.11 Controller input of azimuth subsystem in Case 1
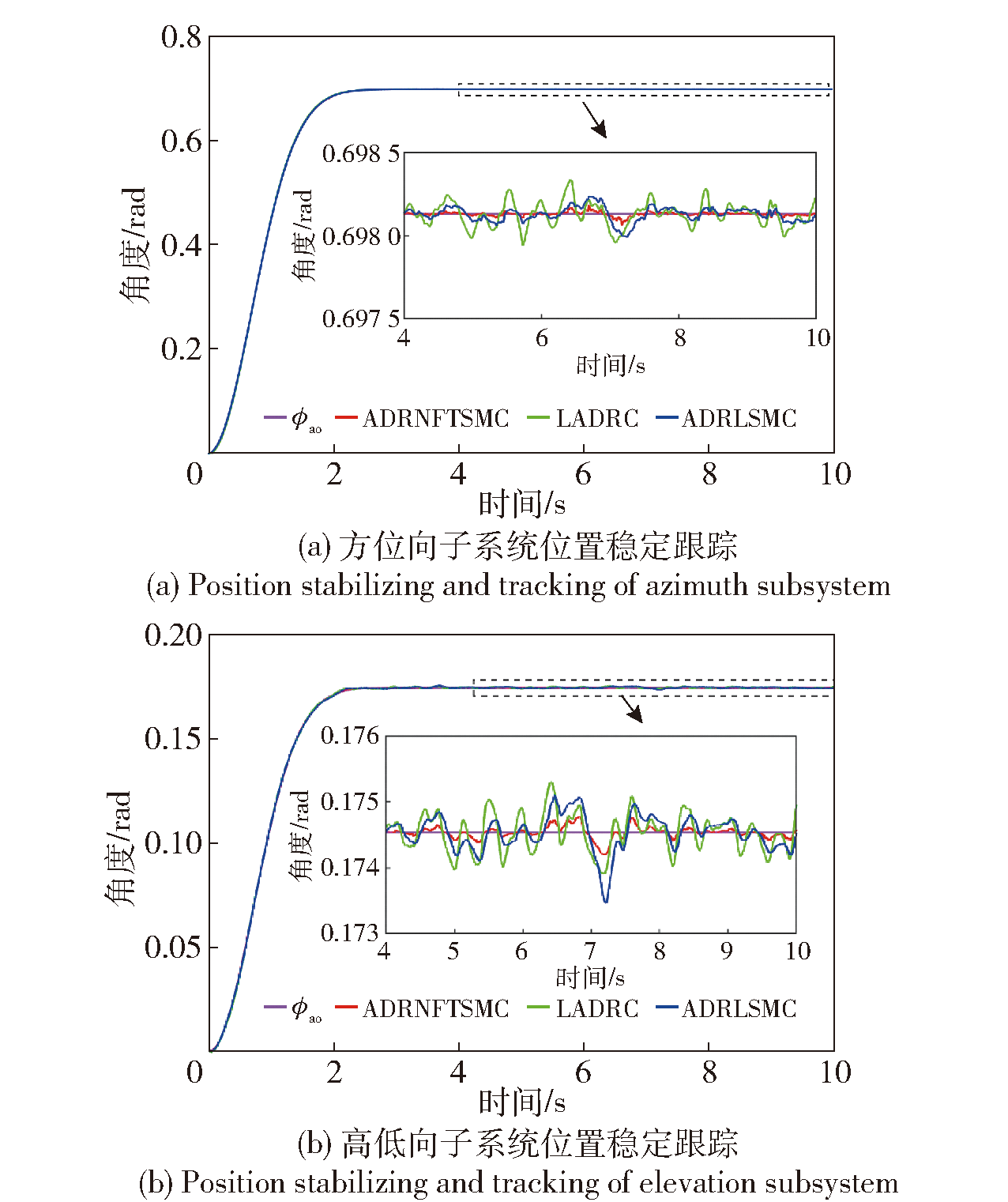
Fig.12 Position stabilizing and tracking of TGCS in Case 2

Fig.13 Stabilizing and tracking error of TGCS in Case 2
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| σ/mrad | 方位 | 0.0079 | 0.0563 | 0.0336 |
| 高低 | 0.0598 | 0.2333 | 0.2090 | |
| τ/s(t=5s) | 方位 | 5.2660 | 5.6070 | 5.6800 |
| τ/s(t=7s) | 7.2840 | 7.4750 | 7.5510 | |
| τ/s(t=7s) | 高低 | 7.1170 | 7.4150 | 7.1540 |
| τ/s(t=9s) | 9.2680 | 9.3320 | 9.3530 | |
Table 3 Comparison of the system simulation results in Case 2
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| σ/mrad | 方位 | 0.0079 | 0.0563 | 0.0336 |
| 高低 | 0.0598 | 0.2333 | 0.2090 | |
| τ/s(t=5s) | 方位 | 5.2660 | 5.6070 | 5.6800 |
| τ/s(t=7s) | 7.2840 | 7.4750 | 7.5510 | |
| τ/s(t=7s) | 高低 | 7.1170 | 7.4150 | 7.1540 |
| τ/s(t=9s) | 9.2680 | 9.3320 | 9.3530 | |
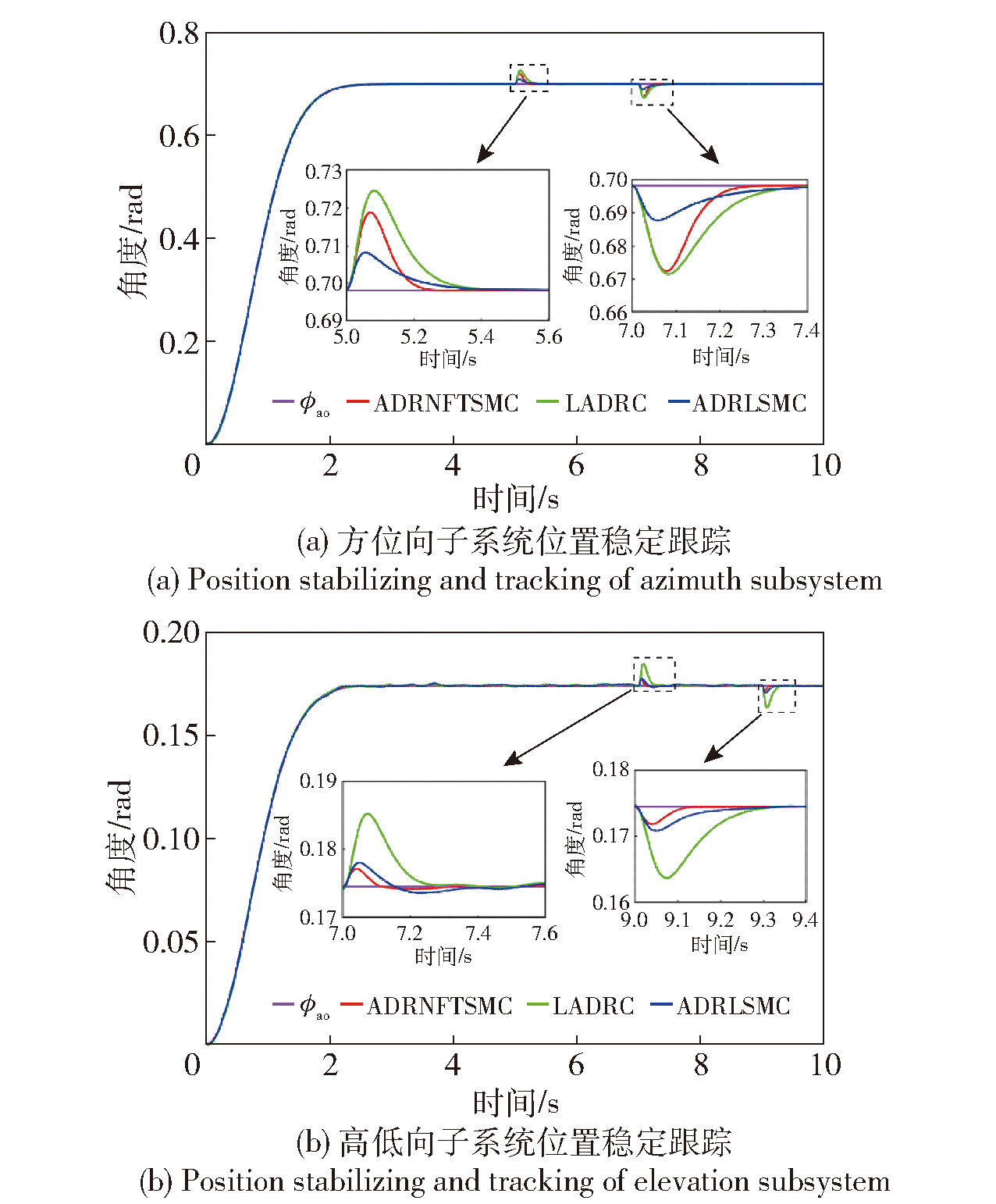
Fig.14 Comparison of the arrival times for position stabilizing and tracking of TGCS in Case 2

Fig.15 Comparison of the tracking errors of TGCS at a speed of 25km/h in Case 3
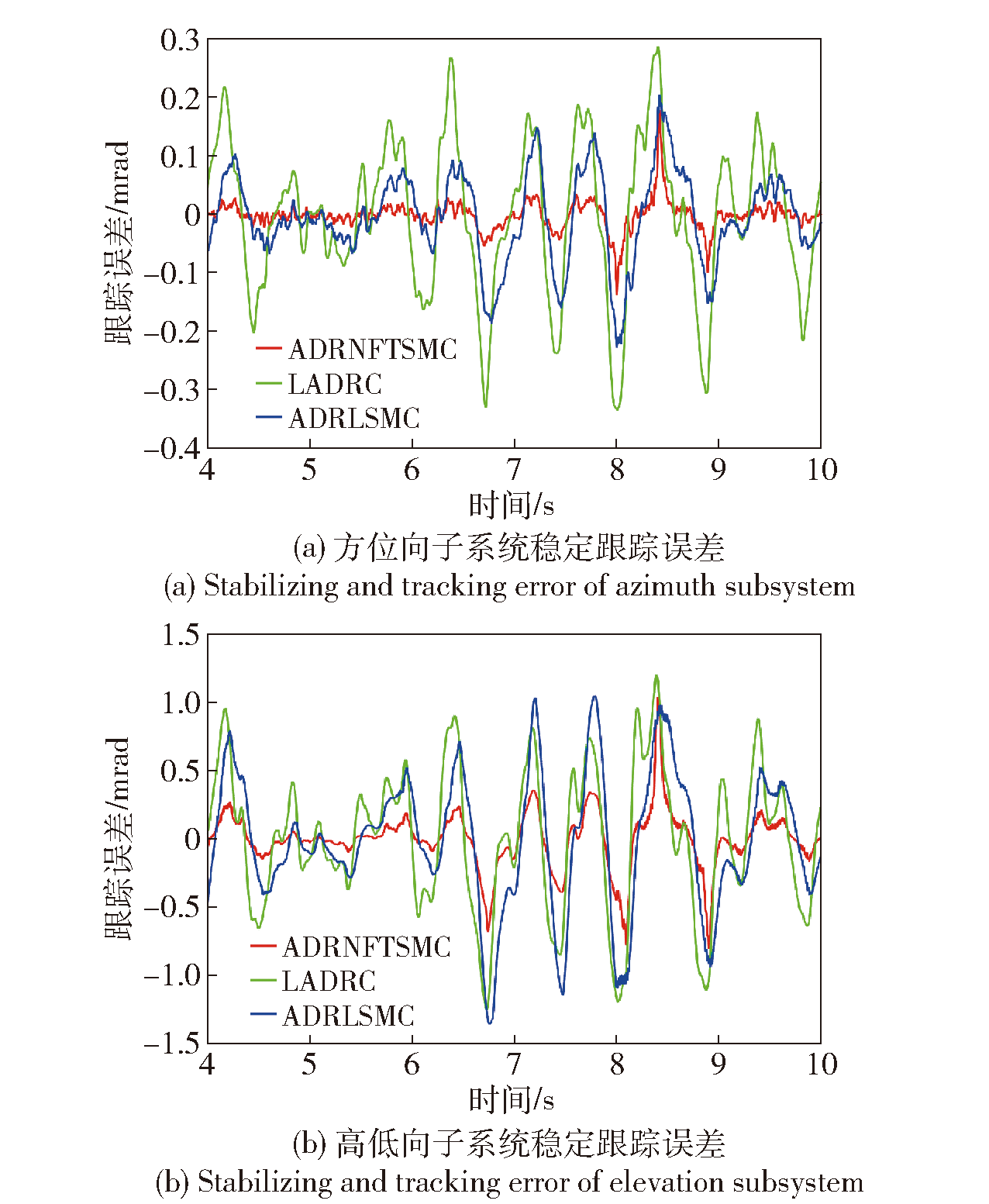
Fig.16 Comparison of the tracking errors of TGCS at a speed of 30km/h in Case 3
| 车速 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| 25km/h | 方位 | 0.0097 | 0.0742 | 0.0439 |
| 高低 | 0.0938 | 0.3126 | 0.2879 | |
| 30km/h | 方位 | 0.0149 | 0.1043 | 0.0595 |
| 高低 | 0.1397 | 0.4207 | 0.3879 | |
Table 4 Comparison of stabilizing and tracking errors of the system after 6 seconds in Case 3 mrad
| 车速 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| 25km/h | 方位 | 0.0097 | 0.0742 | 0.0439 |
| 高低 | 0.0938 | 0.3126 | 0.2879 | |
| 30km/h | 方位 | 0.0149 | 0.1043 | 0.0595 |
| 高低 | 0.1397 | 0.4207 | 0.3879 | |
| [1] |
常天庆, 王钦钊, 张雷, 等. 装甲车辆火控系统[M]. 北京: 北京理工大学出版社, 2020.
|
|
|
|
| [2] |
臧克茂, 马晓军, 李长兵. 现代坦克炮控系统[M]. 北京: 国防工业出版社, 2007.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
王一珉, 杨国来, 王丽群. 坦克炮控系统RBF神经网络自适应鲁棒控制方法研究[J]. 振动与冲击, 2022, 41(24):72-78.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
胡继辉, 侯远龙, 高强, 等. 坦克炮控系统神经网络自适应滑模控制方法[J]. 火力与指挥控制, 2018, 43(6): 118-121,126.
|
|
|
|
| [11] |
|
| [12] |
袁东, 马晓军, 魏曙光, 等. 坦克炮控系统直传式驱动及其死区补偿控制[J]. 电机与控制学报, 2016, 20(5): 111-118.
|
|
|
|
| [13] |
|
| [14] |
田建辉, 钱林方, 徐亚栋, 等. 火力线跟踪与瞄准的任务空间控制方法[J]. 南京理工大学学报(自然科学版), 2011, 35(4): 489-493.
|
|
|
|
| [15] |
袁树森, 邓文翔, 姚建勇, 等. 基于Mworks的坦克随动系统建模与仿真研究[J]. 弹道学报, 2021, 33(1): 35-43.
doi: 10.12115/j.issn.1004-499X(2021)01-006 |
|
doi: 10.12115/j.issn.1004-499X(2021)01-006 |
|
| [16] |
韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [17] |
|
| [18] |
李世华, 王翔宇, 丁世宏, 等. 滑模控制理论与应用研究[M]. 北京: 科学出版社, 2022.
|
|
|
|
| [19] |
|
| [20] |
王超. 坦克行进间非线性动力学建模与主动稳定控制研究[D]. 南京: 南京理工大学, 2021.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1016/j.isatra.2024.01.005 pmid: 38220544 |
| [23] |
赵新运, 于剑桥. 新型迅捷弹箭动力学建模与姿态控制[J]. 兵工学报, 2024, 45(7):2182-2196.
doi: 10.12382/bgxb.2023.0404 |
|
doi: 10.12382/bgxb.2023.0404 |
|
| [24] |
|
| [25] |
高雨轩, 侯远龙, 高强, 等. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4):1071-1085.
|
|
doi: 10.12382/bgxb.2022.0890 |
|
| [26] |
|
| [27] |
|
| [28] |
马晓军, 袁东, 魏曙光. 坦克武器电力传动控制原理与应用[M]. 北京: 国防工业出版社, 2023.
|
|
|
|
| [29] |
|
| [30] |
郑颖. 某集束火箭炮位置伺服系统自抗扰方法研究[D]. 南京: 南京理工大学, 2015.
|
|
|
|
| [31] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7): 1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [32] |
|
| [1] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [2] | LIU Jinrong, LI Wei. Non-magnetic Heating and High-precision Temperature Control of the Alkali-metal Vapor Cell in SERF Atomic Spin Gyroscope [J]. Acta Armamentarii, 2024, 45(9): 3288-3296. |
| [3] | LIN Yubin, HOU Baolin, BAO Dan, ZHAO Wei. Implicit Lyapunov Function-based Variable Gain Super-twisting Sliding Mode Control of an Ammunition Transfer Manipulator [J]. Acta Armamentarii, 2024, 45(8): 2573-2583. |
| [4] | JI Wen, LI Chunna, JIA Xuyi, WANG Gang, GONG Chunlin. A High-spinning Projectile Aerodynamic Modeling Method Combining System Identification and Transfer Learning [J]. Acta Armamentarii, 2024, 45(7): 2197-2208. |
| [5] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [6] | ZHU Weilin, YAO Jianyong, LIU Jiahui, LI Lan, ZHANG Jialin. Active Disturbance Rejection Force Synchronization Control for Pump-controlled Multi-link Erection System [J]. Acta Armamentarii, 2024, 45(6): 1906-1920. |
| [7] | LIN Zhonglin, WANG Haitao, LIU Wenchao, GAN Jinyu, ZHANG Tianhong, HUANG Feng. Aero-engine Compressor Pressure Simulation Method Based on Multi-mode Acceleration and Backstepping Sliding Mode [J]. Acta Armamentarii, 2024, 45(6): 1776-1786. |
| [8] | WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(5): 1384-1401. |
| [9] | WEI Qiaoling, DU Yuxin, ZHOU Chao, WANG Fang. Non-singular Sliding Mode Control of Non-minimum Phase Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(11): 3949-3958. |
| [10] | TIAN Ye, CHEN Guangsong, LIU Taisu. Wear Characteristics of Coordinated Ammunition Ramming Mechanism in Automatic Ammunition Loading System for Artillery [J]. Acta Armamentarii, 2024, 45(11): 4062-4070. |
| [11] | ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control [J]. Acta Armamentarii, 2024, 45(10): 3619-3630. |
| [12] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [13] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [14] | MA Yuemeng, WANG Linwei, SHAO Chuntao, ZHOU Di, WANG Yonghai. Active-Disturbance-Rejection/Robust Attitude Control System Design of Underactuated Vehicle Based on Flap Control [J]. Acta Armamentarii, 2023, 44(5): 1251-1266. |
| [15] | GAO Yuxuan, HOU Yuanlong, GAO Qiang, HOU Runmin. Compound Control Method of ADRC and FNTSM for Airborne Object Tracking System [J]. Acta Armamentarii, 2023, 44(4): 1071-1085. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||