
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (6): 1906-1920.doi: 10.12382/bgxb.2023.0318
Previous Articles Next Articles
ZHU Weilin1, YAO Jianyong1,*( ), LIU Jiahui1, LI Lan2, ZHANG Jialin2
), LIU Jiahui1, LI Lan2, ZHANG Jialin2
Received:2023-04-07
Online:2023-07-04
Contact:
YAO Jianyong
CLC Number:
ZHU Weilin, YAO Jianyong, LIU Jiahui, LI Lan, ZHANG Jialin. Active Disturbance Rejection Force Synchronization Control for Pump-controlled Multi-link Erection System[J]. Acta Armamentarii, 2024, 45(6): 1906-1920.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Two erection schemes
Fig.2 Motion sketch of multi-link erection mechanism
Fig.3 Erection force curves
Fig.4 Schematic diagram of closed pump-controlled hydraulic system
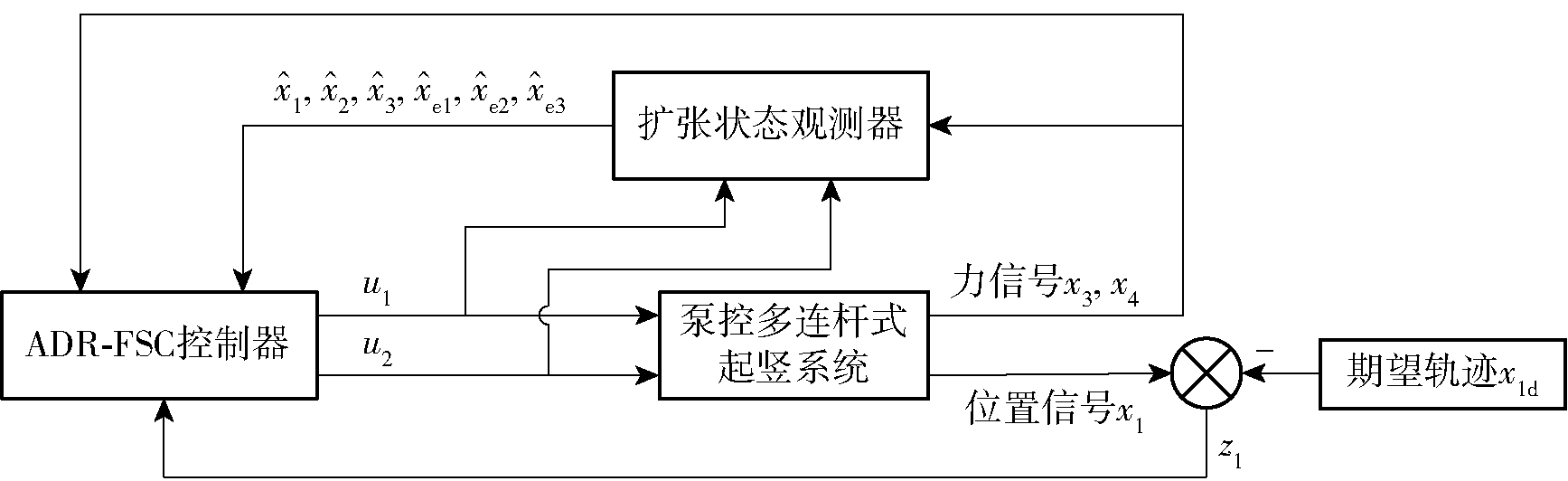
Fig.5 Schematic diagram of ADR-FSC strategy for the pump-controlled multi-link erection system

Fig.6 Experimental platform of multi-link erection system

Fig.7 Electro-hydrostatic actuator
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| J/(kg·m2) | 2.6×105 | V0Z/m3 | 1.075×10-4 |
| kω/(r·min-1·V-1) | 300 | V0F/m3 | 0.0283 |
| Dp/(m3·rev-1) | 1.8×10-4 | Ct/(m3·s-1·Pa-1) | 4.82×10-13 |
| A1Z/m2 | 0.0269 | Cp/(m3·s-1·Pa-1) | 2.56×10-11 |
| A1F/m2 | 0.0068 | Bf/(N·m·s·rad-1) | 80000 |
| A2Z/m2 | 0.0143 | Af/(N·m) | 3500 |
| A2F/m2 | 0.0048 | βe/Pa | 7×108 |
Table 1 Parameters of multi-link erection experiment
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| J/(kg·m2) | 2.6×105 | V0Z/m3 | 1.075×10-4 |
| kω/(r·min-1·V-1) | 300 | V0F/m3 | 0.0283 |
| Dp/(m3·rev-1) | 1.8×10-4 | Ct/(m3·s-1·Pa-1) | 4.82×10-13 |
| A1Z/m2 | 0.0269 | Cp/(m3·s-1·Pa-1) | 2.56×10-11 |
| A1F/m2 | 0.0068 | Bf/(N·m·s·rad-1) | 80000 |
| A2Z/m2 | 0.0143 | Af/(N·m) | 3500 |
| A2F/m2 | 0.0048 | βe/Pa | 7×108 |
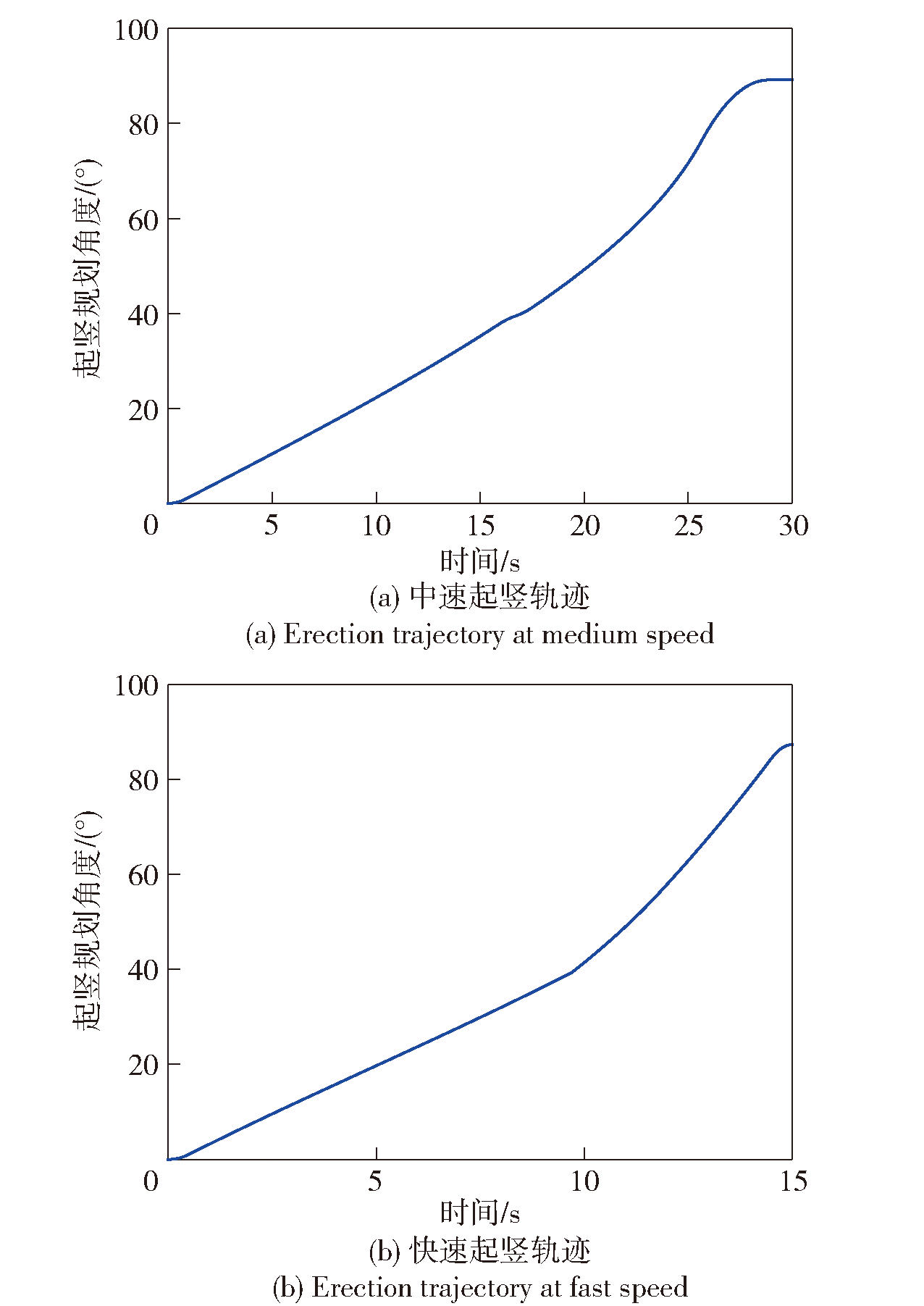
Fig.8 Desired erection trajectory

Fig.9 Tracking performance under ADR-FSC in Case 1
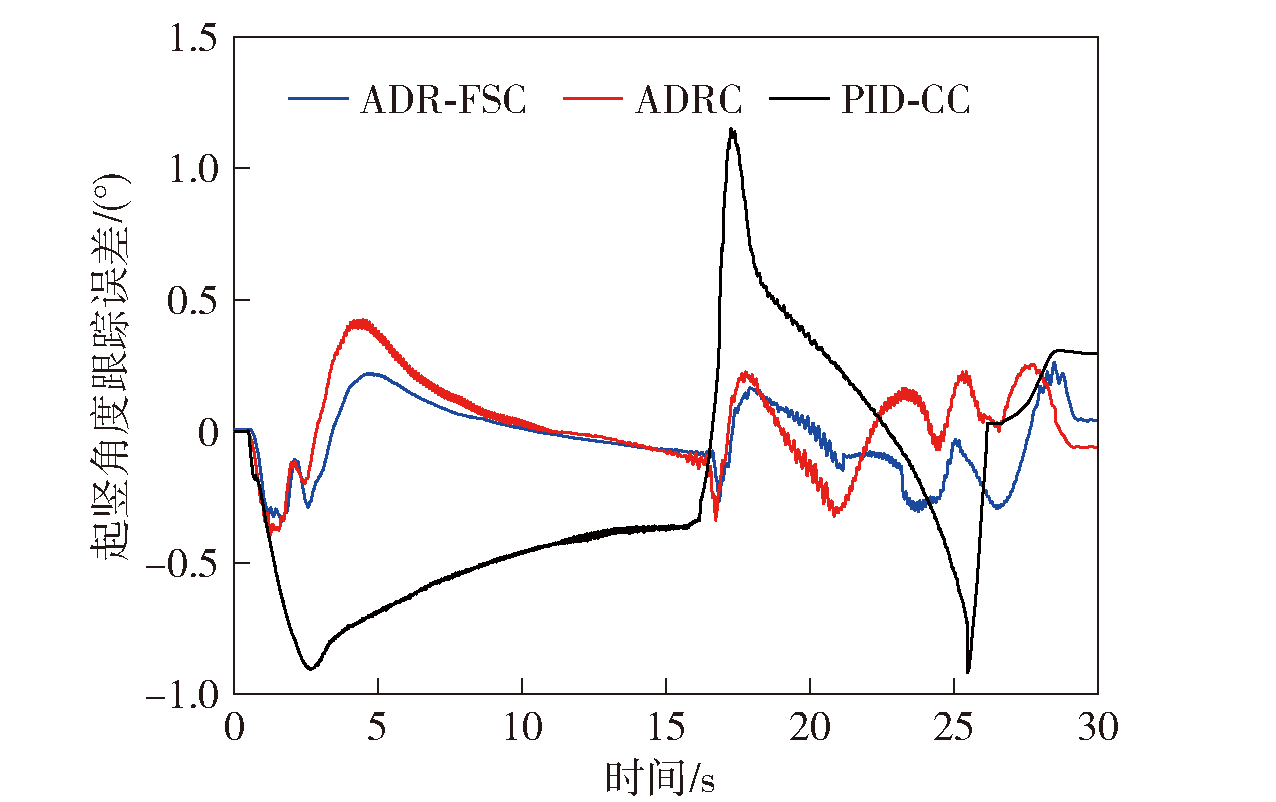
Fig.10 Comparison of tracking errors for the erection angle in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.3144 | 0.1140 | 0.0874 |
| ADR | 0.4328 | 0.1300 | 0.1073 |
| PID-CC | 1.1519 | 0.4255 | 0.2429 |
Table 2 Performance indexes of erection angle tracking in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.3144 | 0.1140 | 0.0874 |
| ADR | 0.4328 | 0.1300 | 0.1073 |
| PID-CC | 1.1519 | 0.4255 | 0.2429 |
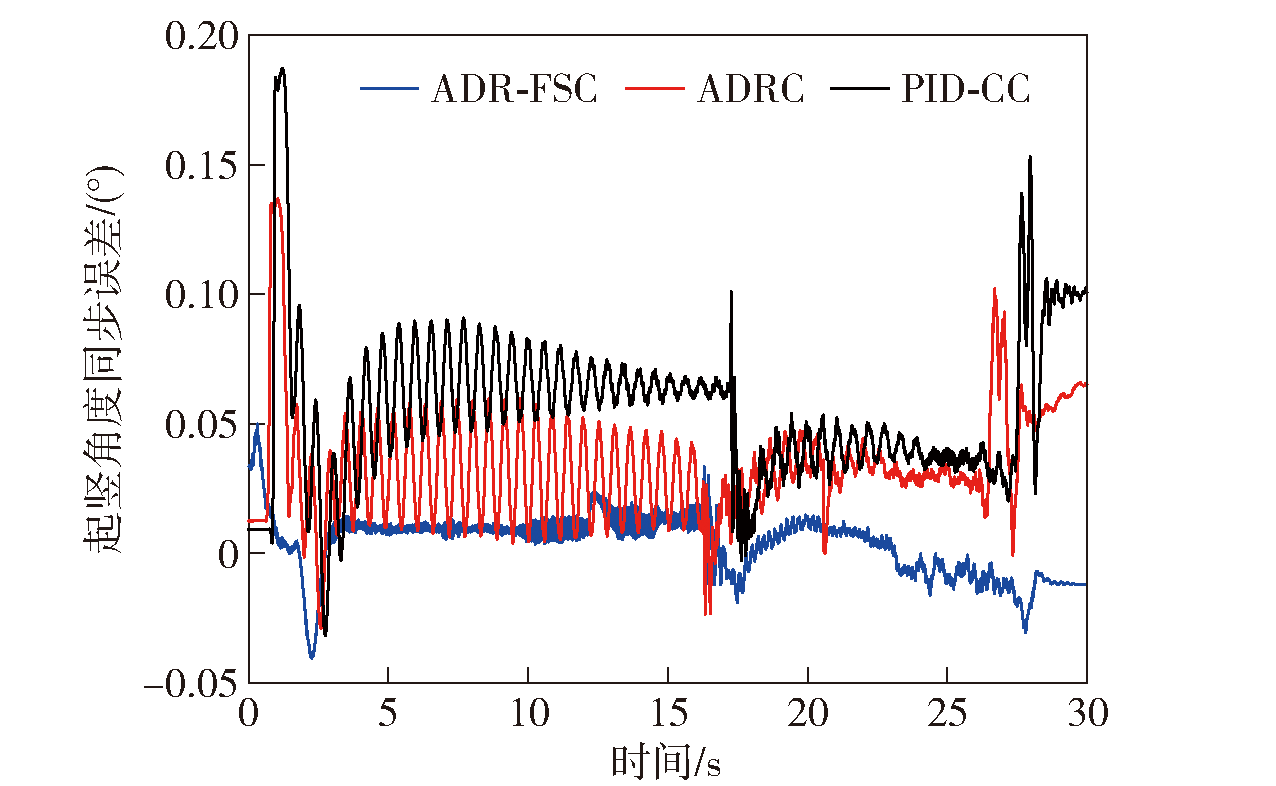
Fig.11 Comparison of synchronization errors for the erection angle in Case 1
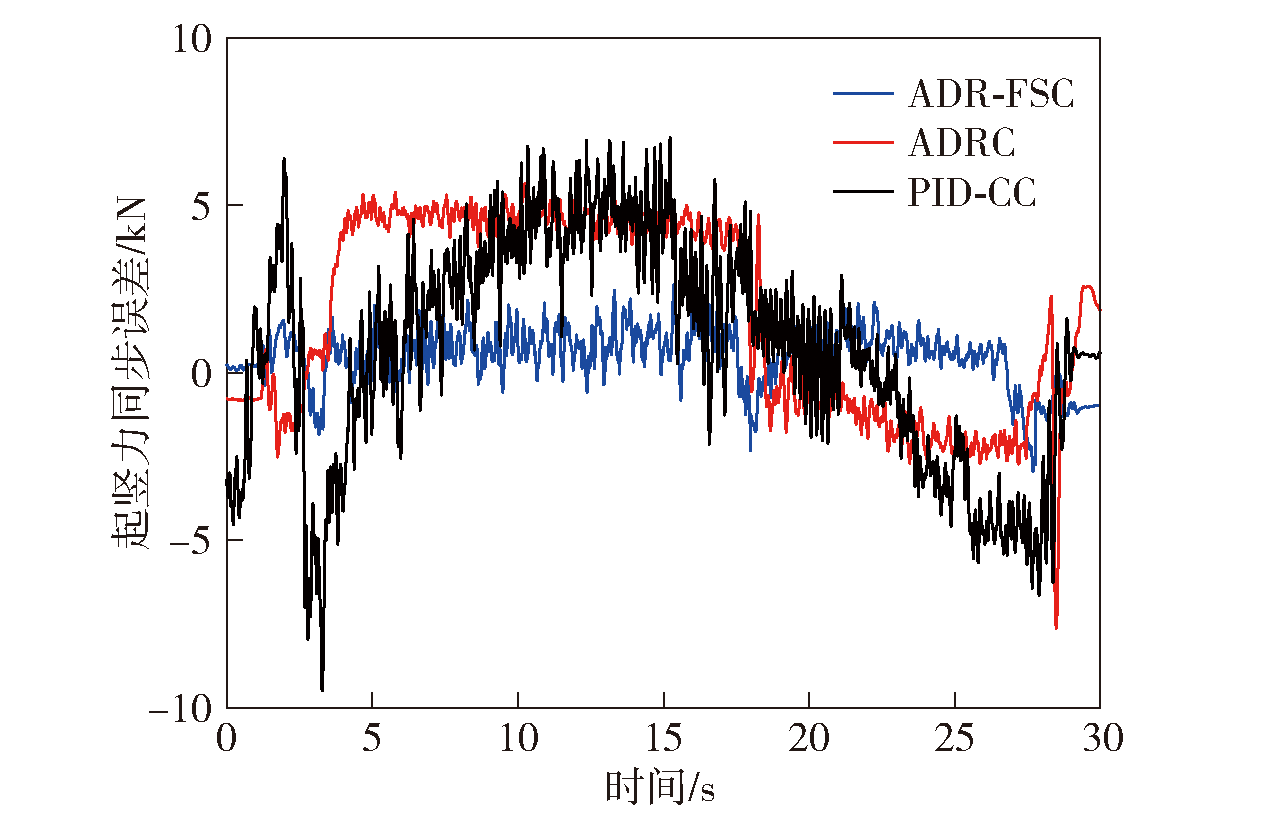
Fig.12 Comparison of synchronization errors for the erection force in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0500 | 0.0107 | 0.0065 |
| ADR | 0.1369 | 0.0344 | 0.0211 |
| PID-CC | 0.1872 | 0.0559 | 0.0288 |
Table 3 Synchronization indexes of erection angle in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0500 | 0.0107 | 0.0065 |
| ADR | 0.1369 | 0.0344 | 0.0211 |
| PID-CC | 0.1872 | 0.0559 | 0.0288 |
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 2944 | 842 | 513 |
| ADR | 7623 | 2895 | 1730 |
| PID-CC | 9495 | 3050 | 1820 |
Table 4 Synchronization indexes of erection force in Case 1
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 2944 | 842 | 513 |
| ADR | 7623 | 2895 | 1730 |
| PID-CC | 9495 | 3050 | 1820 |
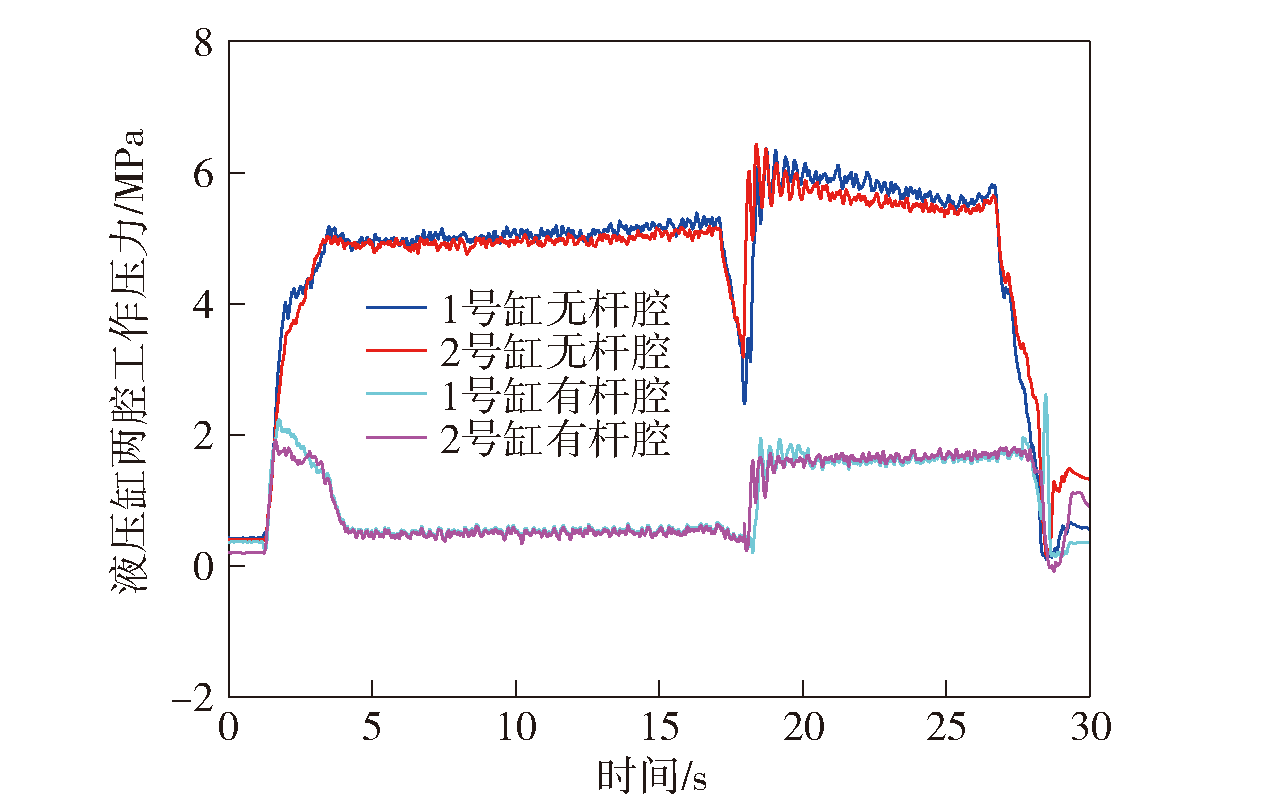
Fig.13 Pressure curves under ADR-FSC in Case 1
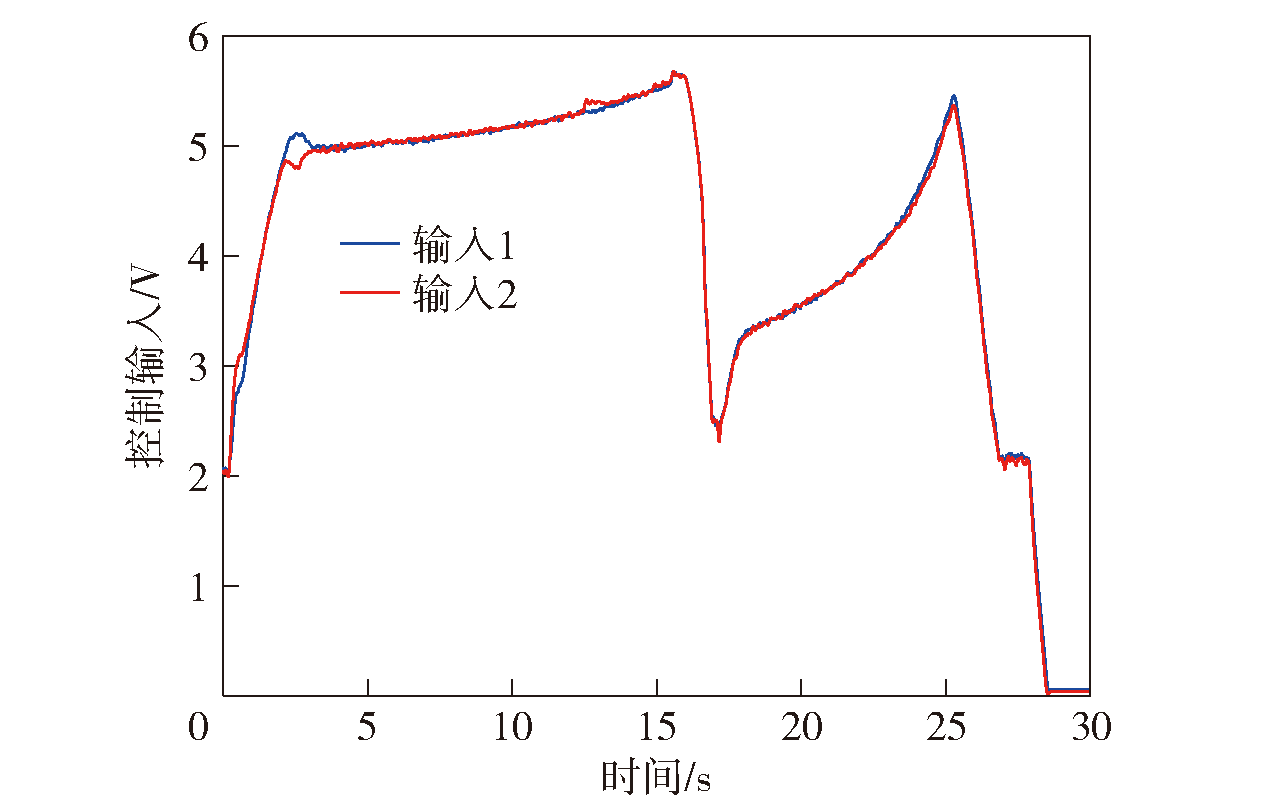
Fig.14 Control inputs of ADR-FSC in Case 1
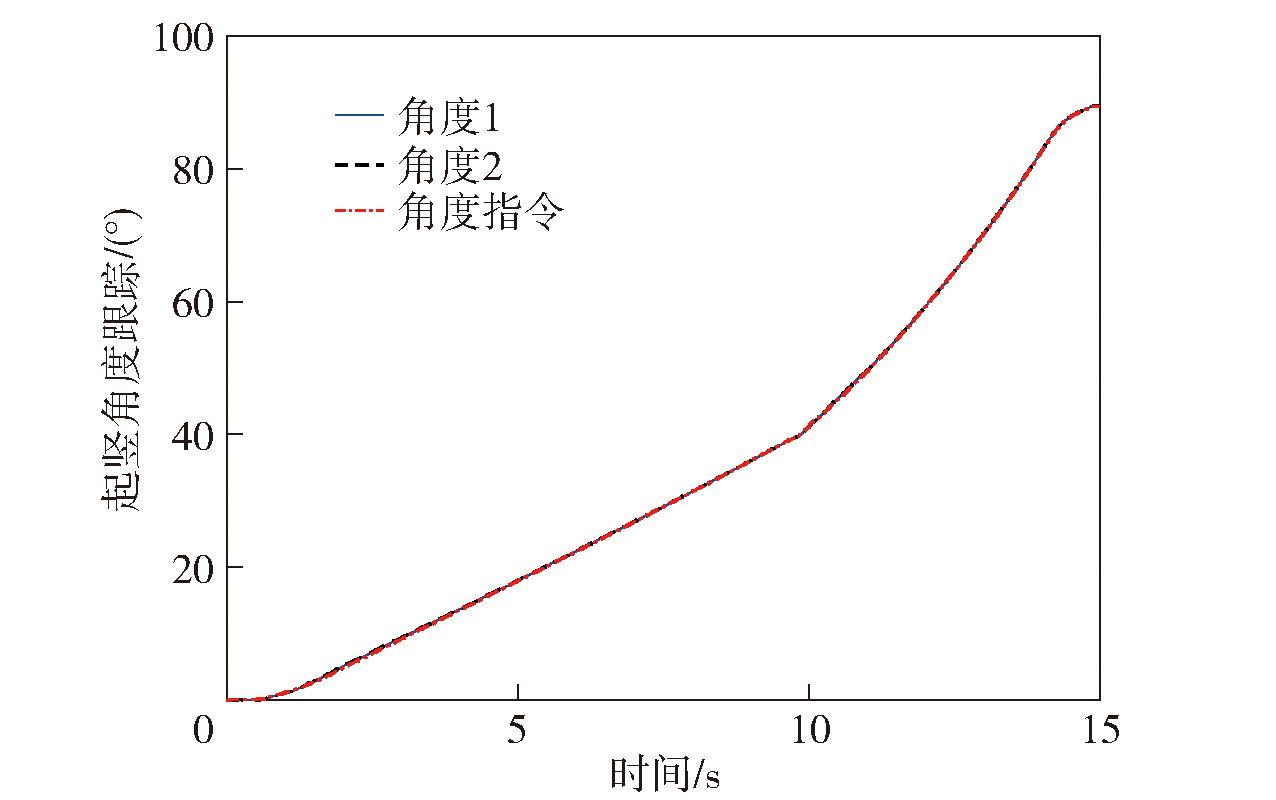
Fig.15 Tracking performance under ADR-FSC in Case 2
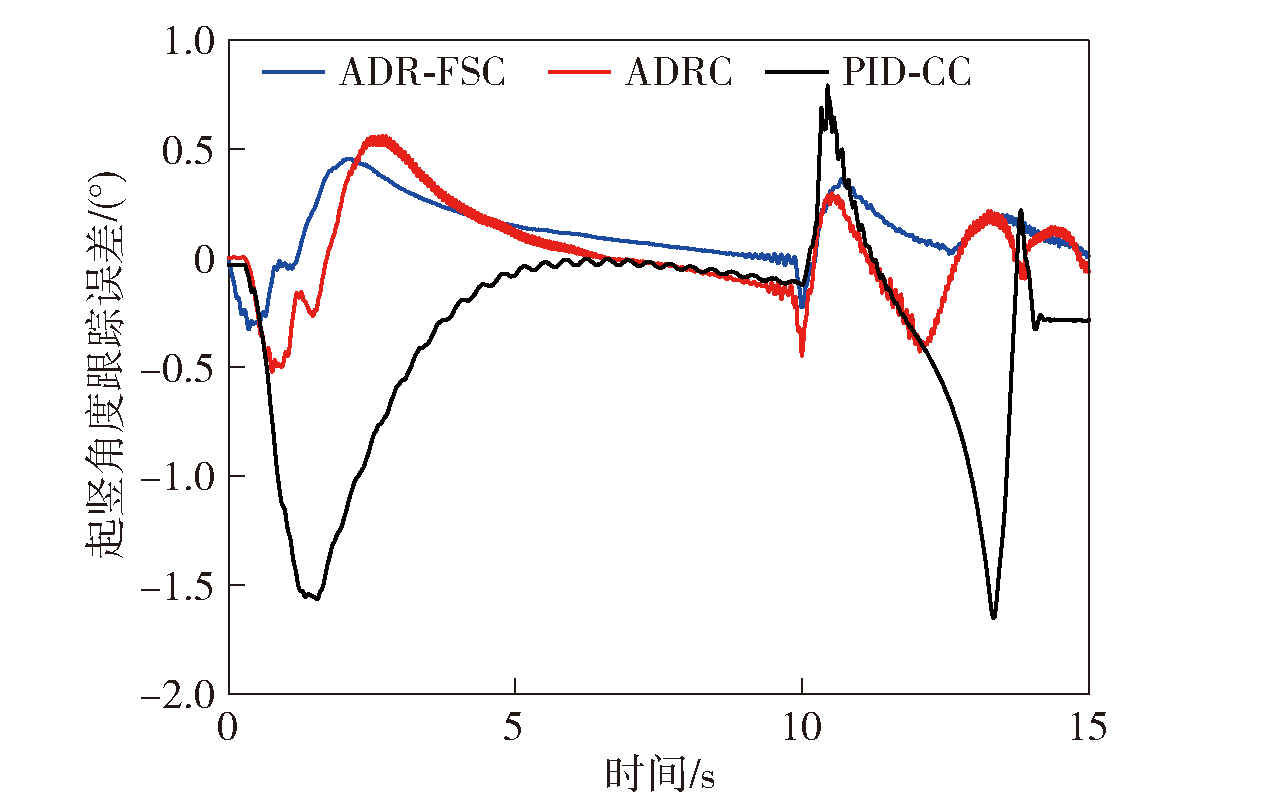
Fig.16 Comparison of tracking errors for the erection angle in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.4573 | 0.1532 | 0.1166 |
| ADR | 0.5607 | 0.1696 | 0.1454 |
| PID-CC | 1.6514 | 0.4334 | 0.4365 |
Tab.5 Performance indexes of erection angle tracking in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.4573 | 0.1532 | 0.1166 |
| ADR | 0.5607 | 0.1696 | 0.1454 |
| PID-CC | 1.6514 | 0.4334 | 0.4365 |
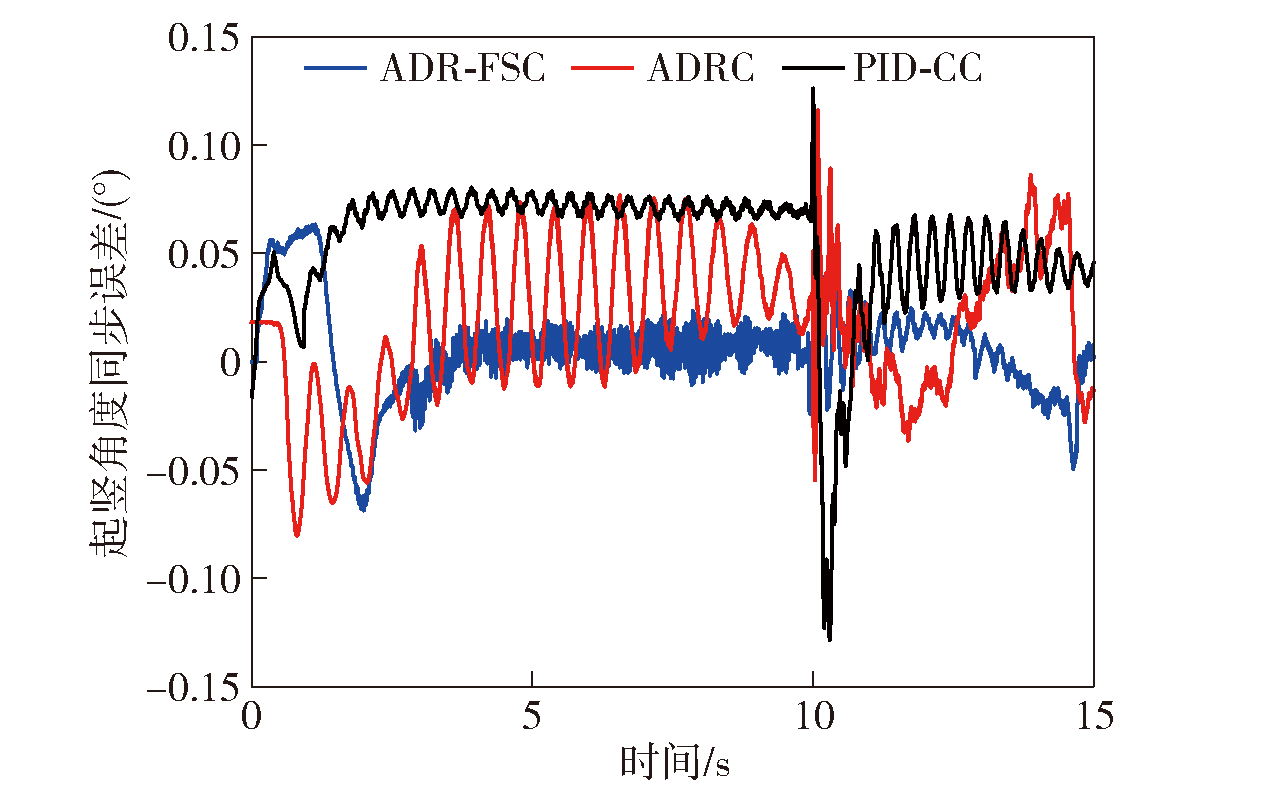
Fig.17 Comparison of synchronization errors for the erection angle in Case 2

Fig.18 Comparison of synchronization errors for the erection force in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0687 | 0.0155 | 0.0158 |
| ADR | 0.1261 | 0.0415 | 0.0221 |
| PID-CC | 0.1385 | 0.0691 | 0.0292 |
Table 6 Synchronization indexes of erection angle in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0687 | 0.0155 | 0.0158 |
| ADR | 0.1261 | 0.0415 | 0.0221 |
| PID-CC | 0.1385 | 0.0691 | 0.0292 |
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 4210 | 871 | 560 |
| ADR | 6746 | 3712 | 1794 |
| PID-CC | 9262 | 3869 | 1954 |
Table 7 Synchronization indexes of erection force in Case 2
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 4210 | 871 | 560 |
| ADR | 6746 | 3712 | 1794 |
| PID-CC | 9262 | 3869 | 1954 |
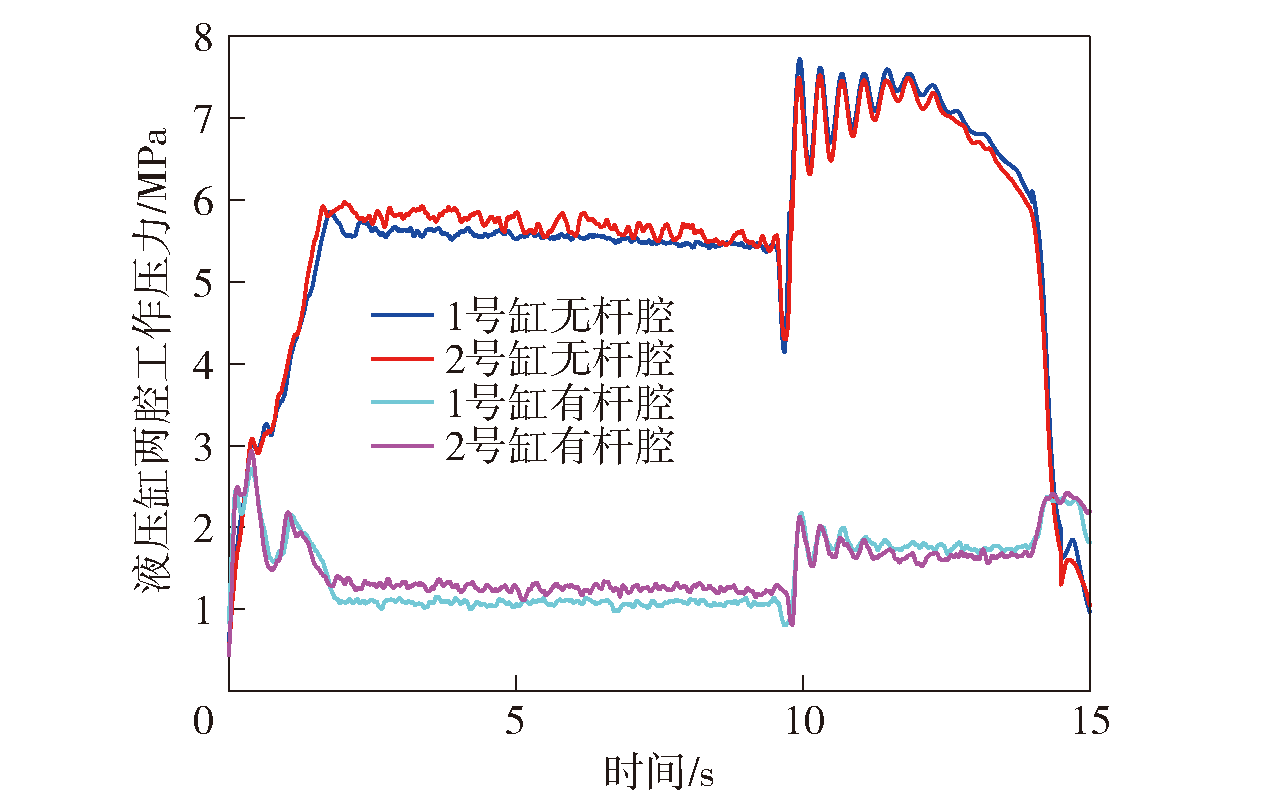
Fig.19 Pressure curves under ADR-FSC in Case 2
| [1] |
冯江涛, 高钦和, 邵亚军, 等. 导弹液压起竖系统流量压力复合控制策略研究[J]. 兵工学报, 2018, 39(2): 209-216.
doi: 10.3969/j.issn.1000-1093.2018.02.001 |
|
|
|
| [2] |
周伯俊, 于传强, 刘志浩, 等. 基于高压储能的特种车辆快速起竖技术与验证[J]. 兵工学报, 2022, 43(7): 1488-1497.
doi: 10.12382/bgxb.2021.0461 |
|
doi: 10.12382/bgxb.2021.0461 |
|
| [3] |
|
| [4] |
郝云晓, 夏连鹏, 权龙, 等. 闭式泵控液气储能重载举升机构特性研究[J]. 机械工程学报, 2019, 55(16): 213-219.
doi: 10.3901/JME.2019.16.213 |
|
doi: 10.3901/JME.2019.16.213 |
|
| [5] |
陈革新, 赵鹏辉, 刘小胜, 等. 电液伺服闭式泵控系统位置前馈补偿控制研究[J]. 液压与气动, 2019(12): 28-32.
doi: 10.11832/j.issn.1000-4858.2019.12.004 |
|
|
|
| [6] |
|
| [7] |
|
| [8] |
李良, 谢建, 黄建招. 动态面滑模控制在大型液压起竖系统中的应用研究[J]. 兵工学报, 2014, 35(2): 235-240.
doi: 10.3969/j.issn.1000-1093.2014.02.015 |
|
doi: 10.3969/j.issn.1000-1093.2014.02.015 |
|
| [9] |
李良, 谢建, 黄建招. 起竖系统建模及动态面自适应滑模控制[J]. 系统工程与电子技术, 2014, 36(2): 337-342.
|
|
|
|
| [10] |
杜文正, 吴鹏, 张金星, 等. 高阶滑模控制在液压起竖系统中的应用[J]. 机床与液压, 2016, 44(21): 69-73.
|
|
|
|
| [11] |
朱成, 陈谋. 应用干扰观测器的导弹发射车起竖装置鲁棒控制[J]. 应用科学学报, 2014, 32(3): 319-324.
|
|
|
|
| [12] |
杨俊, 黄书舟, 曾乐. 大型起竖装备液压系统及其鲁棒切换控制策略[J]. 中国机械工程, 2019, 30(22): 2698-2703.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
张兵, 蒋子良, 黄华, 等. 电液双缸系统同步控制[J]. 液压与气动, 2021(2): 30-35.
doi: 10.11832/j.issn.1000-4858.2021.02.005 |
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
刘琪, 卢红, 张新宝, 等. 龙门移动式双驱进给系统定位误差补偿方法[J]. 华中科技大学学报, 2021, 49(12): 22-27.
|
|
|
|
| [20] |
王建红, 陈耀忠, 陈桂, 等. 基于交叉耦合控制的双电机同步控制系统研究[J]. 南京理工大学学报, 2017, 41(6): 693-697.
|
|
|
|
| [21] |
|
| [22] |
|
| [1] | MA Yuemeng, WANG Linwei, SHAO Chuntao, ZHOU Di, WANG Yonghai. Active-Disturbance-Rejection/Robust Attitude Control System Design of Underactuated Vehicle Based on Flap Control [J]. Acta Armamentarii, 2023, 44(5): 1251-1266. |
| [2] | GAO Yuxuan, HOU Yuanlong, GAO Qiang, HOU Runmin. Compound Control Method of ADRC and FNTSM for Airborne Object Tracking System [J]. Acta Armamentarii, 2023, 44(4): 1071-1085. |
| [3] | SUN Hao, SUN Qinglin, SUN Mingwei, CHEN Zengqiang. Parafoil-based UAV Recovery System Under Random Initial Conditions [J]. Acta Armamentarii, 2023, 44(3): 718-727. |
| [4] | LI Dian-qi, DUAN Yong. Implementation of Active Disturbance Rejection Control of Robot by Tracking Differentiator [J]. Acta Armamentarii, 2016, 37(9): 1721-1729. |
| [5] | LI Wei, YANG Gang, CHEN Teng-fei, HAN Chong-wei. Research on Gun Pointing Control of a Full Closed-loop Aiming System [J]. Acta Armamentarii, 2015, 36(9): 1811-1818. |
| [6] | ZHENG Ying, MA Da-wei, YAO Jian-yong, HU Jian. Linear Active Disturbance Rejection Control for Two-axis Coupling Position Servo System of Rocket Launcher [J]. Acta Armamentarii, 2015, 36(6): 987-993. |
| [7] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming, HE Bin. AUV's Depth Control Based on Reconstructive Fault-tolerant Control [J]. Acta Armamentarii, 2015, 36(4): 723-730. |
| [8] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming. AUV’s Bottom Following Control Method Based on ADRC [J]. Acta Armamentarii, 2015, 36(10): 1943-1948. |
| [9] | QI Xiao-hui, LI Jie, HAN Shuai-tao . Adaptive Active Disturbance Rejection Control and Its Simulation Based on BP Neural Network [J]. Acta Armamentarii, 2013, 34(6): 776-782. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||