
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (12): 4395-4406.doi: 10.12382/bgxb.2023.1009
Previous Articles Next Articles
MEI Zewei1,2, LI Tianren3, ZHU Jialin3, SHAO Xingling2,4,*( ), DING Tianyun1,2, LIU Jun1,2
), DING Tianyun1,2, LIU Jun1,2
Received:2023-10-13
Online:2024-02-05
Contact:
SHAO Xingling
CLC Number:
MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision[J]. Acta Armamentarii, 2024, 45(12): 4395-4406.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Distribution diagram of side ejector motor of variable power aerospace craft

Fig.2 Structure block diagram of trajectory planning method for variable dynamic intelligent decision
Fig.3 Schematic diagram of obstacle
Fig.4 Structure diagram of multi-layer feedforward neural network
Fig.5 Training process of DQN
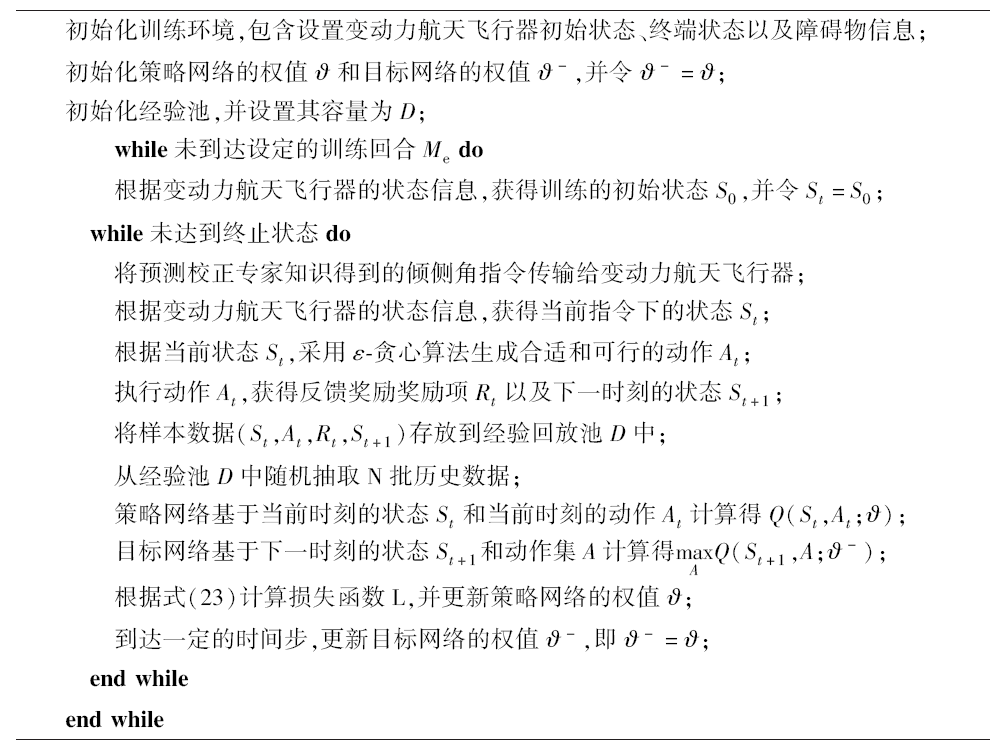
Fig.6 Pseudocodes of DQN-based variable dynamic intelligent decision algorithm
| 参数 | 数值 |
|---|---|
| 奖励值 | R1=200, R2=R3=100, R4=16 |
| 学习率 | 0.001 |
| 折扣因子 | 0.99 |
| 样品批量大小 | 256 |
| 经验池存储容量 | 1×105 |
Table 1 Parameter setting of DQN
| 参数 | 数值 |
|---|---|
| 奖励值 | R1=200, R2=R3=100, R4=16 |
| 学习率 | 0.001 |
| 折扣因子 | 0.99 |
| 样品批量大小 | 256 |
| 经验池存储容量 | 1×105 |
| 参数名称 | 相应数值 |
|---|---|
| 倾侧角最小值/(°) | 0 |
| 倾侧角最大值/(°) | 80 |
| 航向角阈值/(°) | 8 |
| 航程容忍偏差的最小值/km | 10 |
| 马赫容忍偏差的最小值 | 30/vs |
Table 2 Adjustable parameters of simulation
| 参数名称 | 相应数值 |
|---|---|
| 倾侧角最小值/(°) | 0 |
| 倾侧角最大值/(°) | 80 |
| 航向角阈值/(°) | 8 |
| 航程容忍偏差的最小值/km | 10 |
| 马赫容忍偏差的最小值 | 30/vs |
| 算法 | 高度偏 差/km | 经纬度 偏差/(°) | 制导 精度/% |
|---|---|---|---|
| 本文算法 | 0.32 | (-0.0234,-0.0291) | 58.18 |
| 无动力决策算法[ | 0.36 | (0.0321,-0.0824) | 0 |
Table 3 Simulates results in Scenario 1
| 算法 | 高度偏 差/km | 经纬度 偏差/(°) | 制导 精度/% |
|---|---|---|---|
| 本文算法 | 0.32 | (-0.0234,-0.0291) | 58.18 |
| 无动力决策算法[ | 0.36 | (0.0321,-0.0824) | 0 |
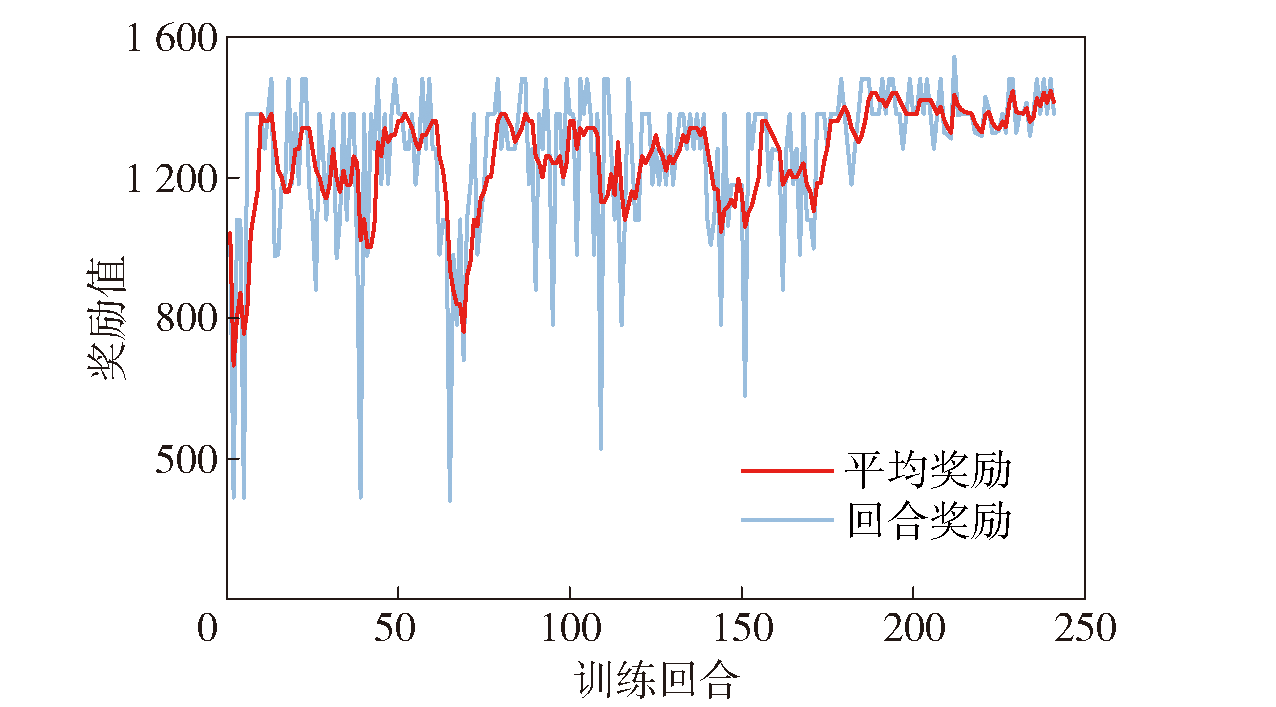
Fig.7 Training reward for providing emergency lateral force within the detection radius
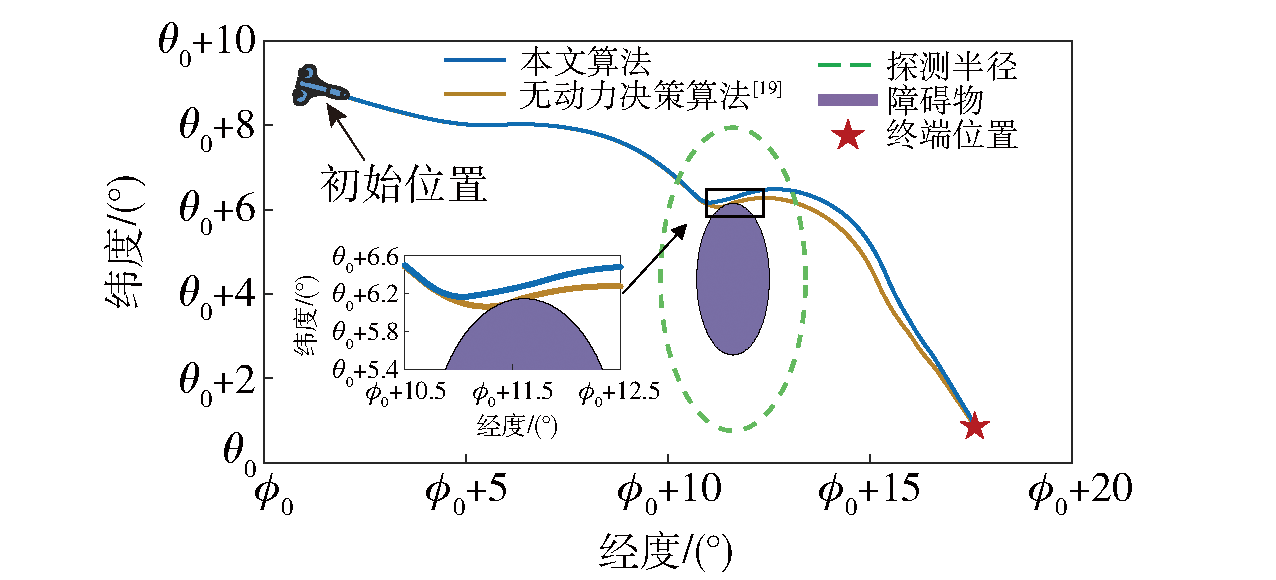
Fig.8 Transverse track path diagram of providing emergency lateral force within the detection radius
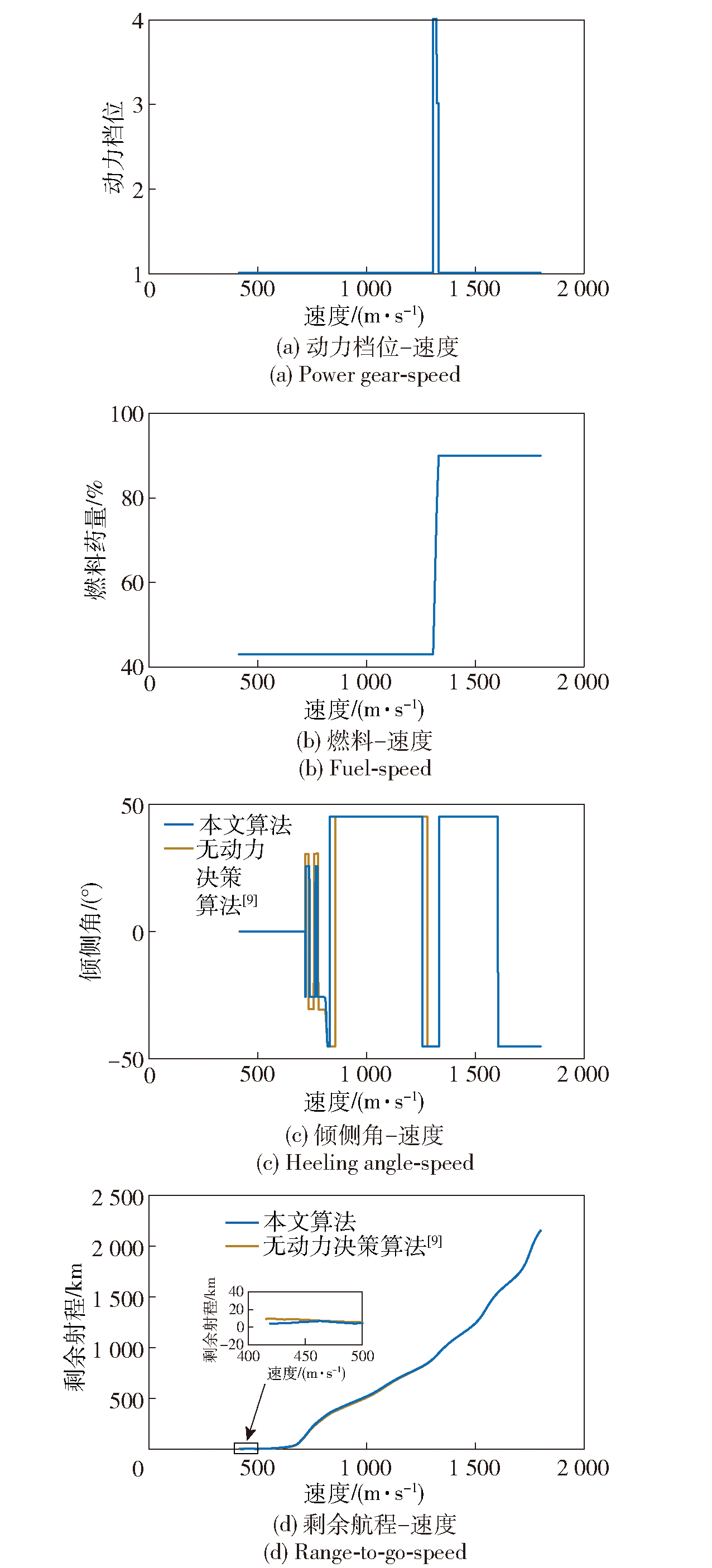
Fig.9 Correlation diagram of providing emergency lateral force within the detection radius
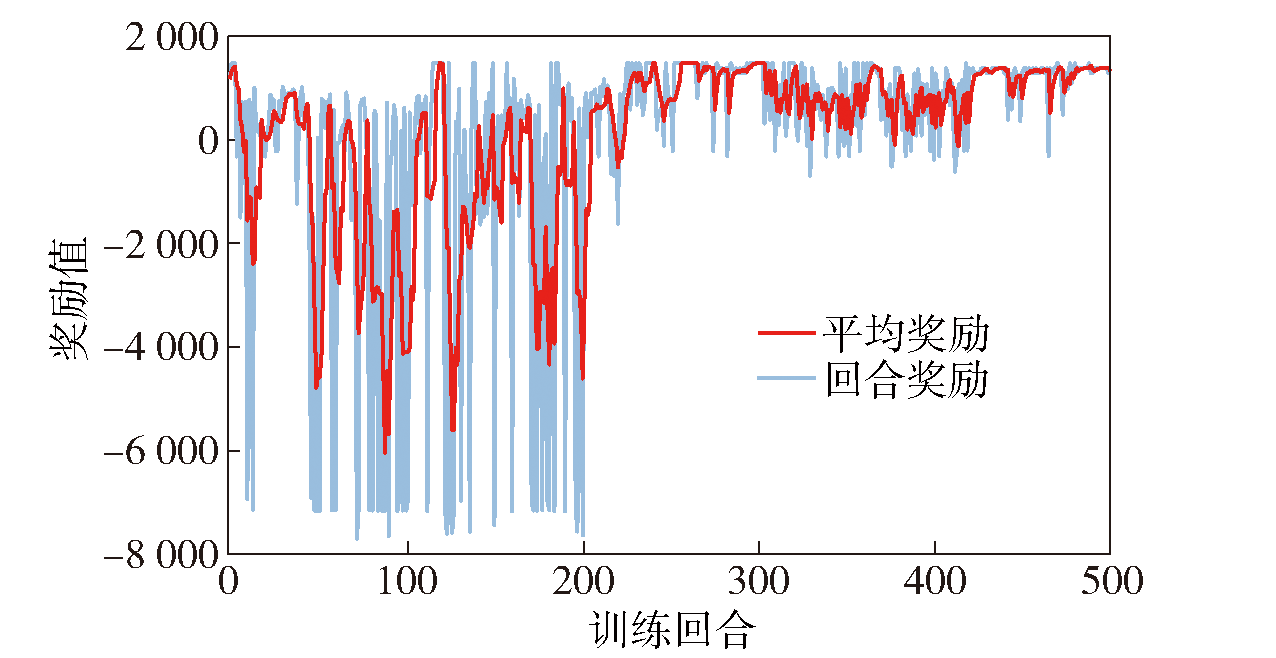
Fig.10 Training reward of providing additional lateral force in flight phase
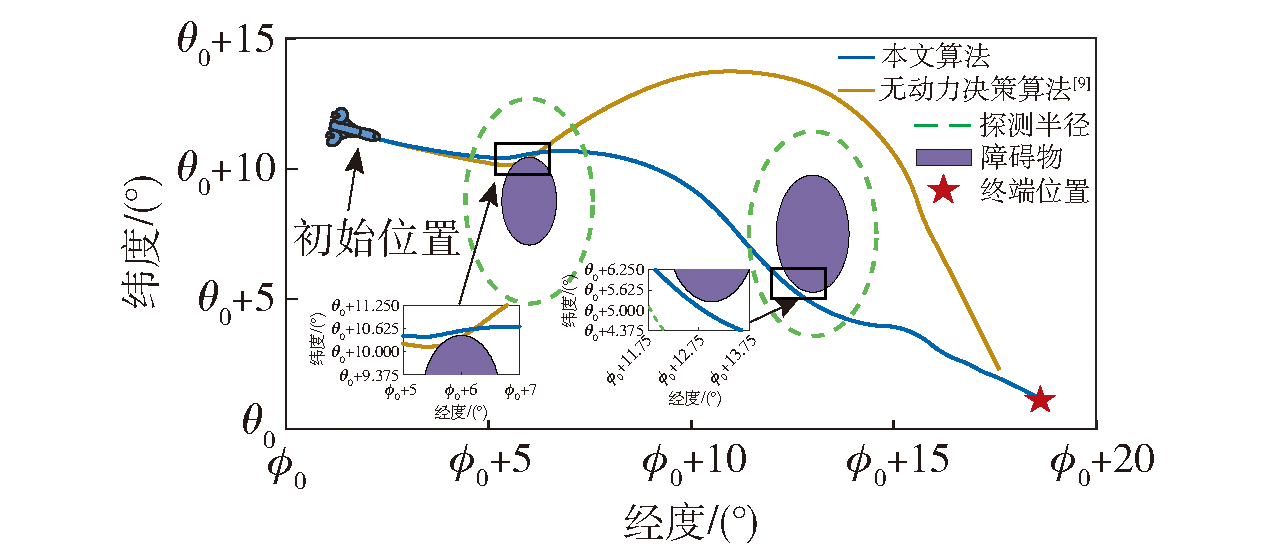
Fig.11 Transverse track path of providing additional lateral force in flight phase
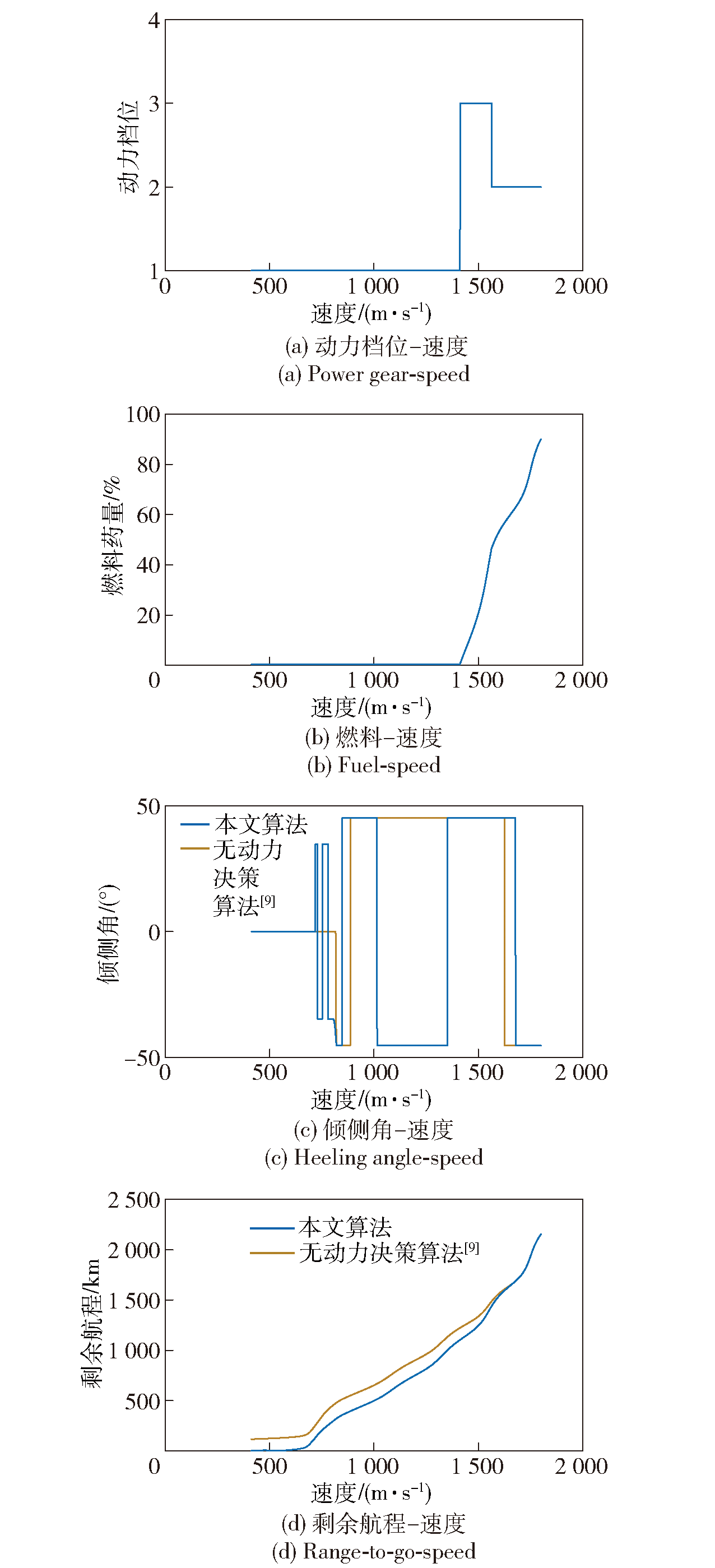
Fig.12 Correlated results of providing additional lateral force in flight phase
| 算法 | 高度偏 差/km | 经纬度 偏差/(°) | 制导 精度/% |
|---|---|---|---|
| 本文算法 | 0.14 | (-0.0038,-0.0201) | 98.06 |
| 无动力决策算法[ | 0.39 | (-1.0353,0.3467) | 0 |
Table 4 Simulated results in Scenario 2
| 算法 | 高度偏 差/km | 经纬度 偏差/(°) | 制导 精度/% |
|---|---|---|---|
| 本文算法 | 0.14 | (-0.0038,-0.0201) | 98.06 |
| 无动力决策算法[ | 0.39 | (-1.0353,0.3467) | 0 |
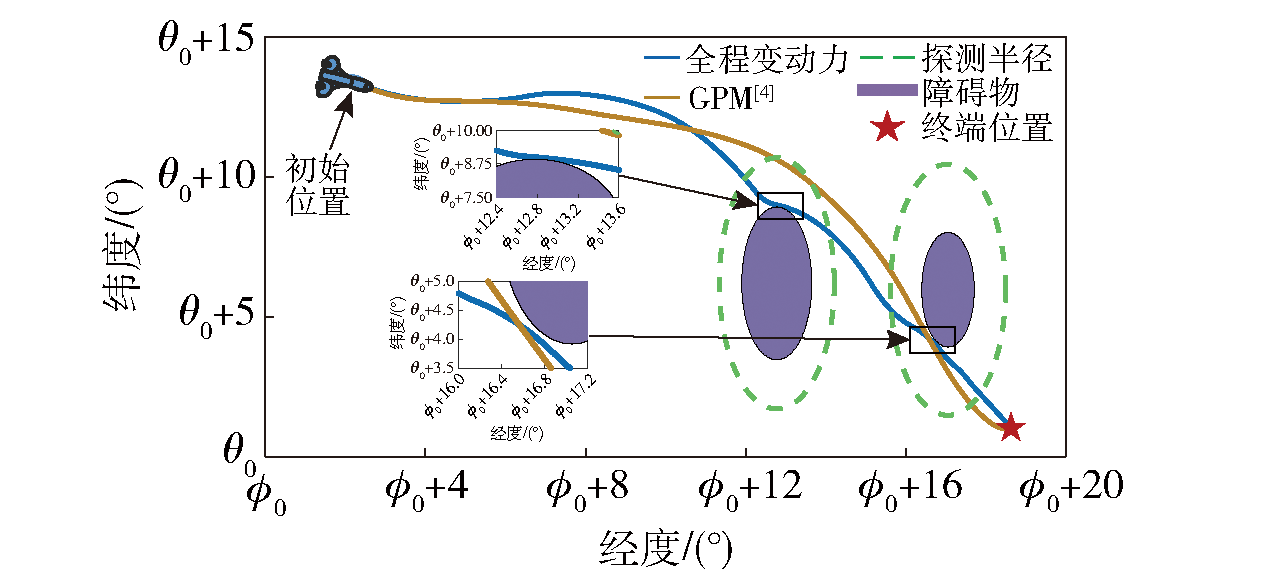
Fig.13 Transverse track paths obtained by the proposed algorithm and GPM
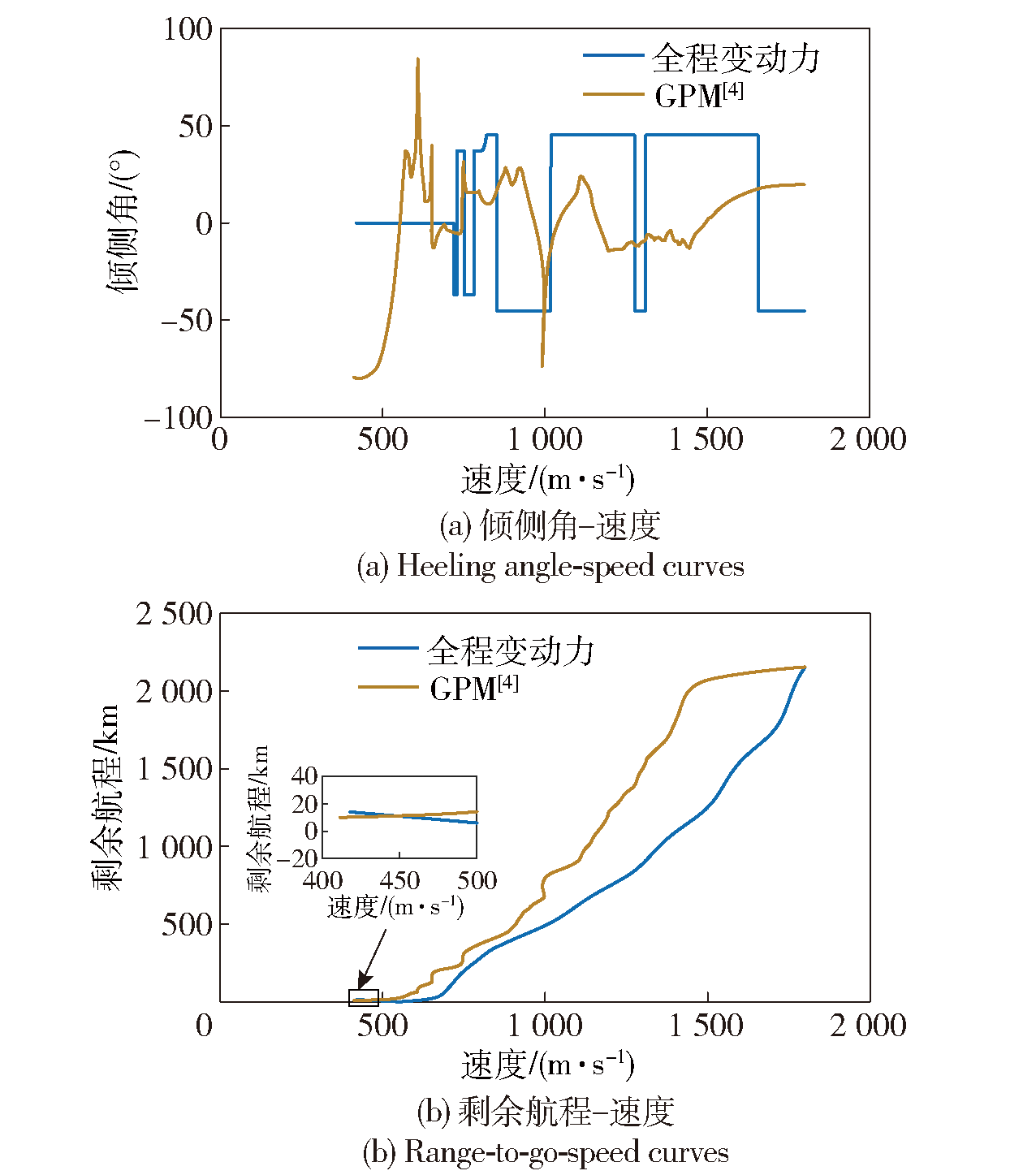
Fig.14 Correlation results obtained by the proposed algorithm and GPM
| [1] |
杜万闪, 周洲, 拜昱, 等. 组合式飞行器多体动力学建模与飞行力学特性[J]. 兵工学报, 2023, 44(8): 2245-2262.
doi: 10.12382/bgxb.2022.0282 |
|
doi: 10.12382/bgxb.2022.0282 |
|
| [2] |
张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7): 1400-1411.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.007 |
|
| [3] |
姜丽敏, 刘海亮, 陈曙暄. 基于姿态反馈实现过载跟踪的飞行器控制方法[J]. 兵工学报, 2022, 43(8): 1835-1844.
doi: 10.12382/bgxb.2021.0111 |
|
doi: 10.12382/bgxb.2021.0111 |
|
| [4] |
周亮, 王昊宇, 尚海滨, 等. 基于高斯伪谱法的天基再入飞行器滑翔轨迹优化设计研究[J]. 空天防御, 2020, 3(3): 89-95.
|
|
|
|
| [5] |
李惠峰, 谢陵. 基于预测校正方法的RLV再入制导律设计[J]. 北京航空航天大学学报, 2009, 35(11): 1344-1348.
|
|
|
|
| [6] |
|
| [7] |
程阳, 程林, 张庆振, 等. 基于在线约束限制的飞行器预测校正制导[J]. 北京航空航天大学学报, 2017, 43(10): 2143-2153.
|
|
|
|
| [8] |
马可, 田江. 主动拦截防护系统探测雷达防弹天线罩设计[J]. 现代雷达, 2021, 43(5): 80-84.
|
|
|
|
| [9] |
田若岑, 张庆振, 郭云鹤, 等. 基于禁飞区规避的高超声速飞行器再入制导律设计[J]. 空天防御, 2022, 5(2): 65-74.
|
|
|
|
| [10] |
章吉力, 刘凯, 樊雅卓, 等. 考虑禁飞区规避的空天飞行器分段预测校正再入制导方法[J]. 宇航学报, 2021, 42(1): 122-131.
|
|
|
|
| [11] |
赵江, 周锐, 张超. 考虑禁飞区规避的预测校正再入制导方法[J]. 北京航空航天大学学报, 2015, 41(5): 864-870.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
付京博, 邵会兵, 詹韬. 基于深度强化学习的飞行器自抗扰控制技术[J]. 计算机仿真, 2022, 39(10): 54-59.
|
|
|
|
| [16] |
黄旭, 柳嘉润, 贾晨辉, 等. 深度确定性策略梯度算法用于无人飞行器控制[J]. 航空学报, 2021, 42(11): 397-407.
|
|
|
|
| [17] |
|
| [18] |
闫斌斌, 李勇, 戴沛, 等. 基于增强学习的变体飞行器自适应变体策略与飞行控制方法研究[J]. 西北工业大学学报, 2019, 37(4): 656-663.
|
|
|
|
| [19] |
汪韧, 惠俊鹏, 俞启东, 等. 基于LSTM模型的飞行器智能制导技术研究[J]. 力学学报, 2021, 53(7): 2047-2057.
|
|
|
|
| [20] |
惠俊鹏, 汪韧, 俞启东. 基于强化学习的再入飞行器“新质”走廊在线生成技术[J]. 航空学报, 2022, 43(9): 623-635.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
doi: 10.1109/TCYB.2019.2914717 pmid: 31180878 |
| [24] |
|
| [1] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [2] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [3] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [4] | DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft [J]. Acta Armamentarii, 2024, 45(11): 3903-3914. |
| [5] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [6] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [7] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [8] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [9] | TANG Chuan-lin,HUANG Chang-qiang,DU Hai-wen,HUANG Han-qiao,DING Da-li,LUO Chang. Study of Trajectory Planning for UCAV Formation Cooperative Attack [J]. Acta Armamentarii, 2014, 35(4): 523-530. |
| [10] | CHEN Guo-da, JI Shi-ming, JIN Ming-sheng, ZHANG Cai. Layering Shaping Mould Gasbag Polishing Trajectory Planning Method for Equal Residual Figure Error [J]. Acta Armamentarii, 2012, 33(6): 724-729. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||