
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (4): 1117-1128.doi: 10.12382/bgxb.2022.1089
潘作栋1,2, 周悦1,*( ), 郭威2,3,**(), 徐高飞2, 孙宇2
), 郭威2,3,**(), 徐高飞2, 孙宇2
收稿日期:2022-11-23
上线日期:2024-04-30
通讯作者:
基金资助:
PAN Zuodong1,2, ZHOU Yue1,*(), GUO Wei2,3,**(), XU Gaofei2, SUN Yu2
Received:2022-11-23
Online:2024-04-30
摘要:
针对滩涂履带车在受潮汐影响的滩涂环境中进行长时间勘测作业的需求,提出柯西贝塞尔快速搜索随机树星(Cauchy Bessel Rapidly-exploring Random Tree Star,CB-RRT*)算法进行路径规划。为规划出安全路径,基于全局地图和潮汐数据,并通过滩涂履带车到分界区的距离构建出滩涂预测模型;为提高滩涂履带车移动到目标点需进行多次路径规划的速度,对初始路径的关键树节点使用柯西概率密度函数进行采样缩小采样范围来提高节点的利用率,进而提高算法的收敛性;在重选父节点过程中考虑最大转角约束设定相应系数,并使用连续二次贝塞尔曲线进行拼接的方式来生成路径,达到提高路径平滑度的目的和解决平滑后路径与原路径偏差过大造成的安全性问题。仿真实验结果表明,CB-RRT*算法在静态滩涂环境和动态滩涂环境中,能大大提高算法的收敛性和路径的平滑性,且保证路径长度最优,研究内容可以保证滩涂履带车在各种滩涂环境中进行长时间安全作业。
中图分类号:
潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128.
PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm[J]. Acta Armamentarii, 2024, 45(4): 1117-1128.
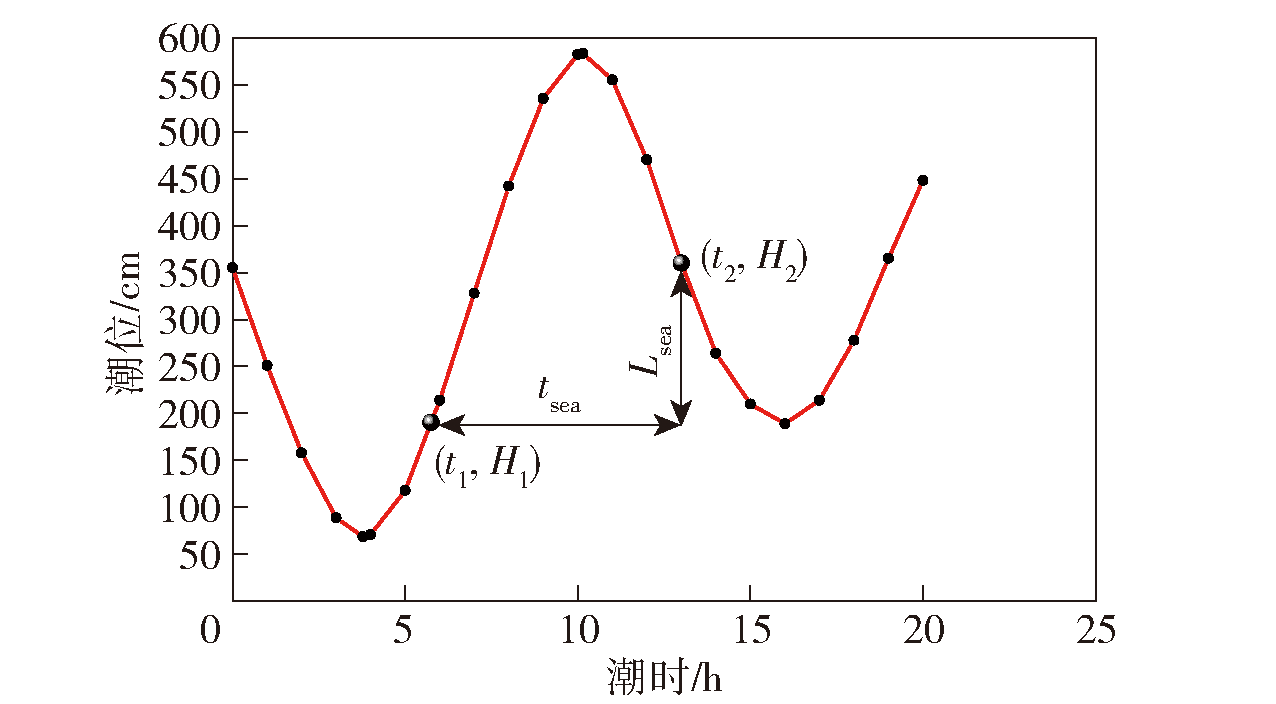
图1 潮汐数据
Fig.1 Tidal data
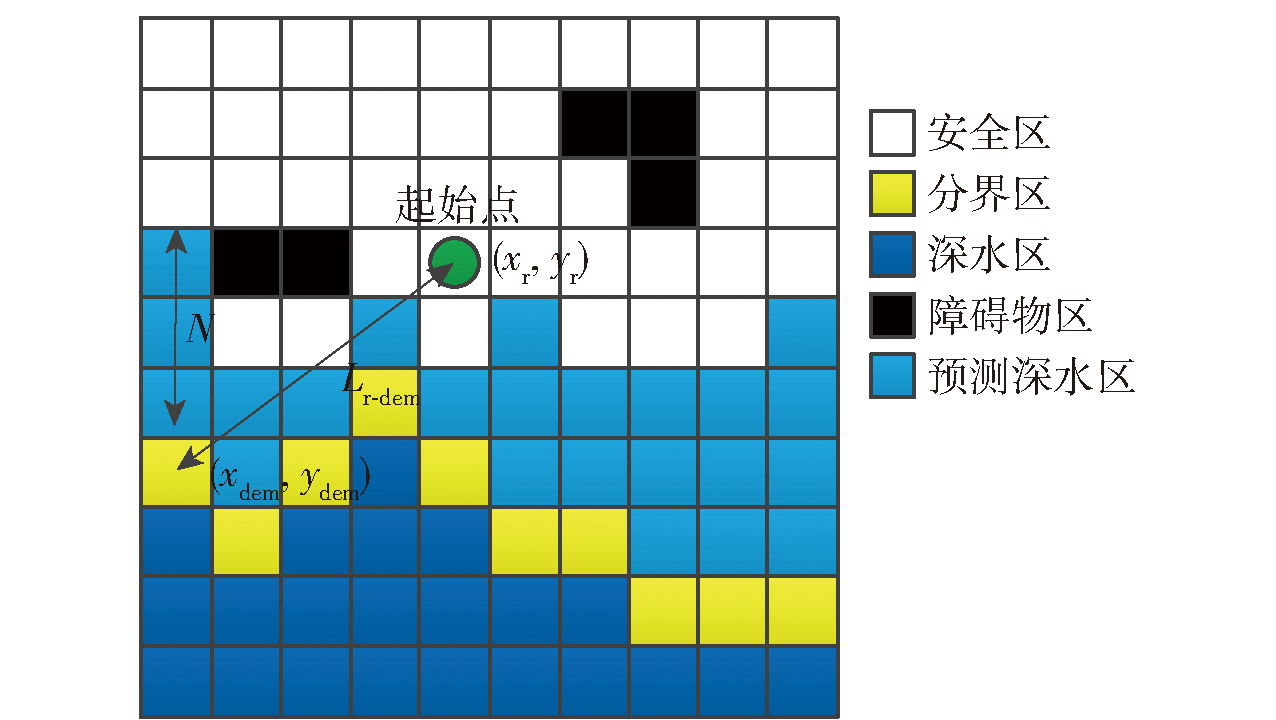
图2 滩涂预测模型
Fig.2 Tidal flat prediction model

图3 CB-RRT*算法流程图
Fig.3 CB-RRT* algorithm flowchart
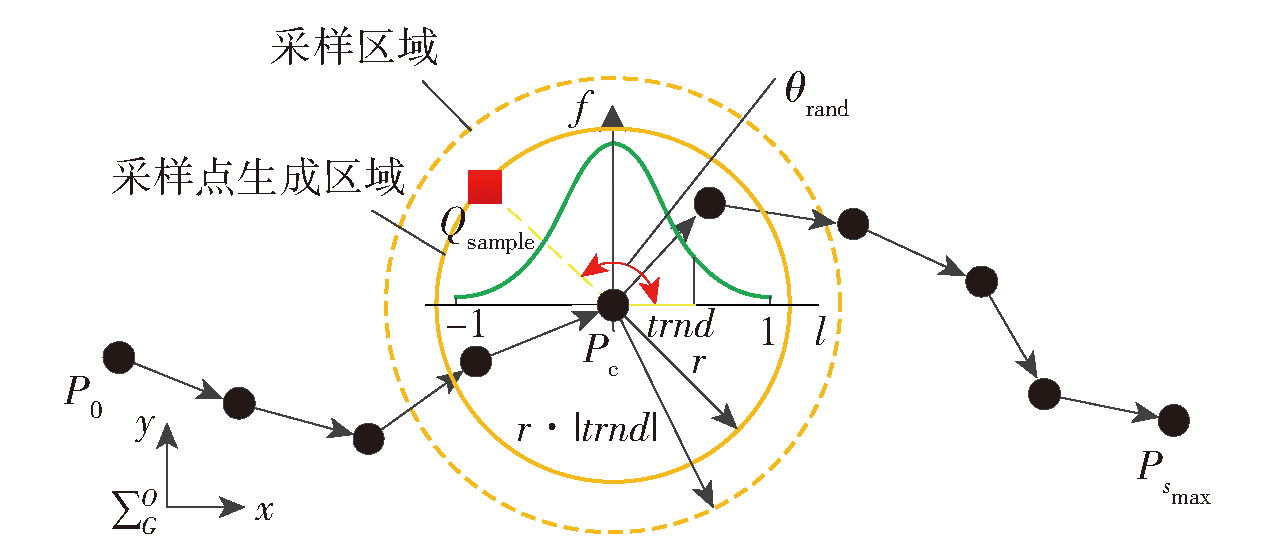
图4 柯西概率密度函数采样
Fig.4 Cauchy probability density function sampling
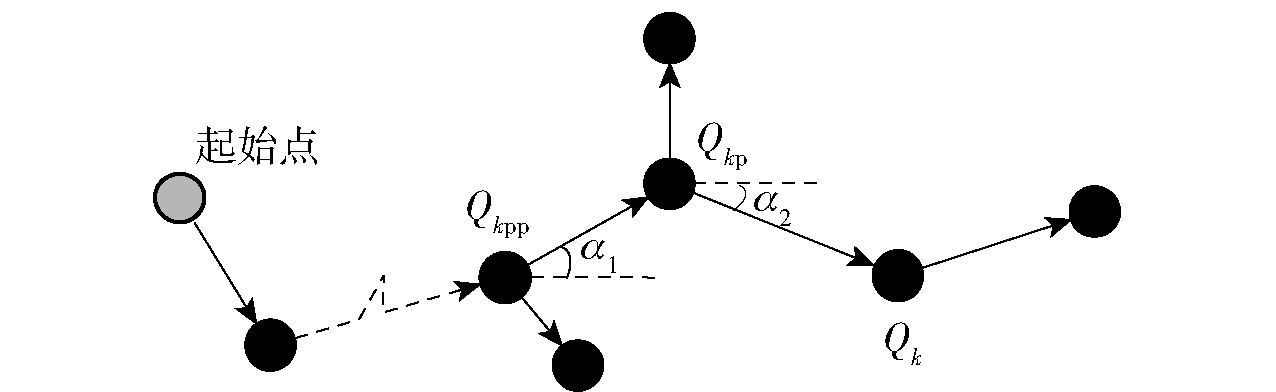
图5 节点角度对应
Fig.5 Node angle correspondence
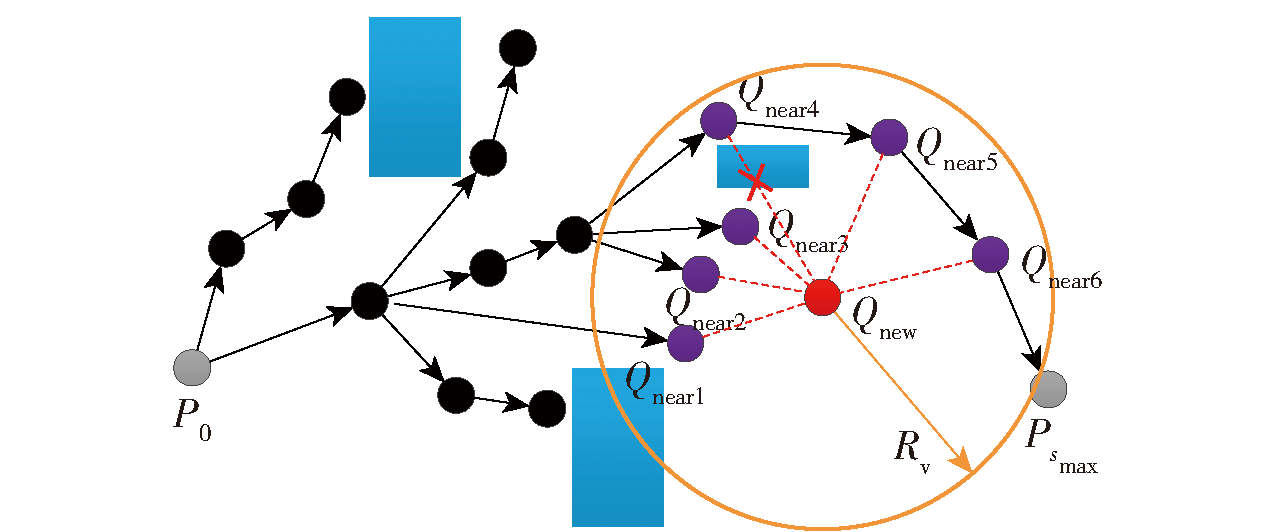
图6 设置新节点的父节点
Fig.6 Setting the parent node of new node
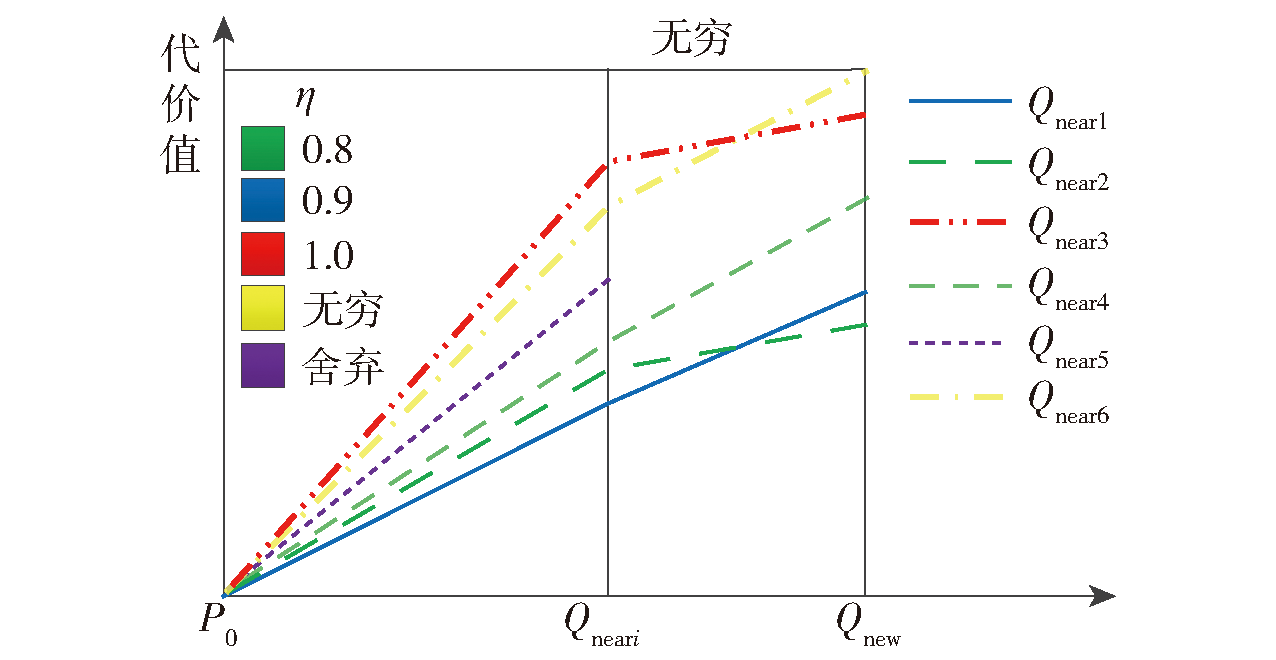
图7 代价函数值
Fig.7 Cost function value
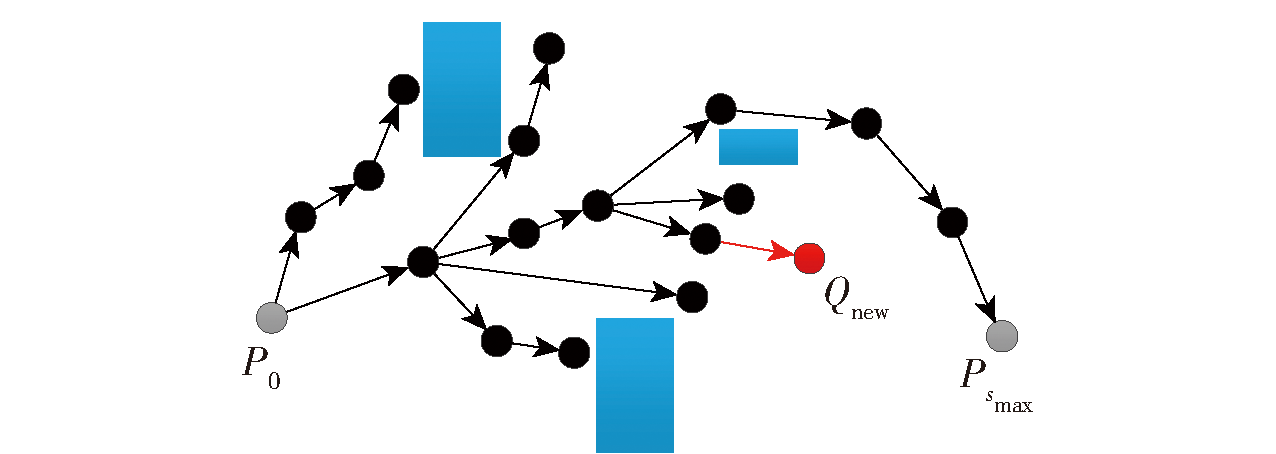
图8 更新父节点
Fig.8 Update parent node
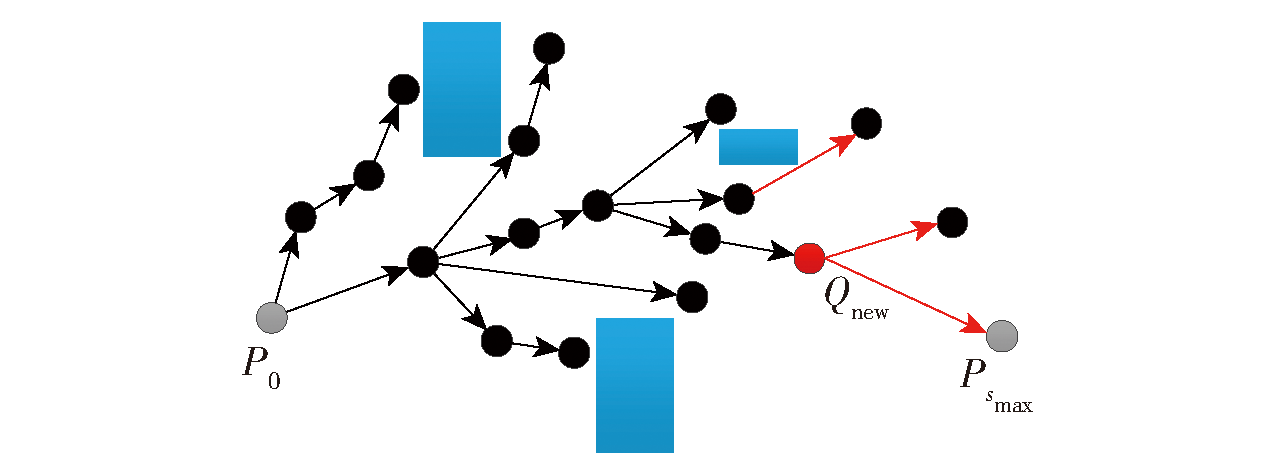
图9 重布线
Fig.9 Rewiring
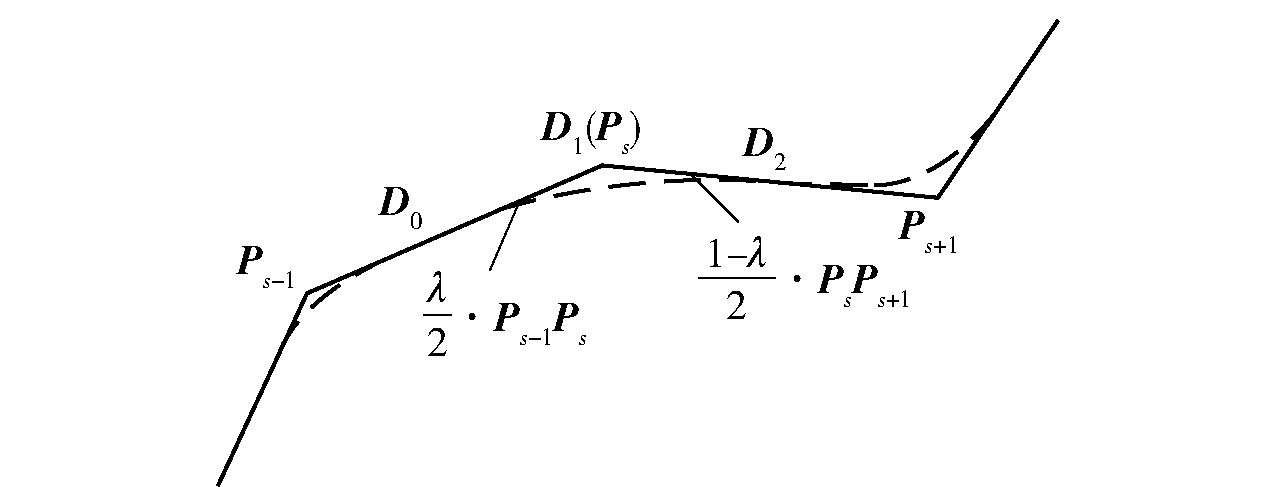
图10 局部路径模型图
Fig.10 Local path model
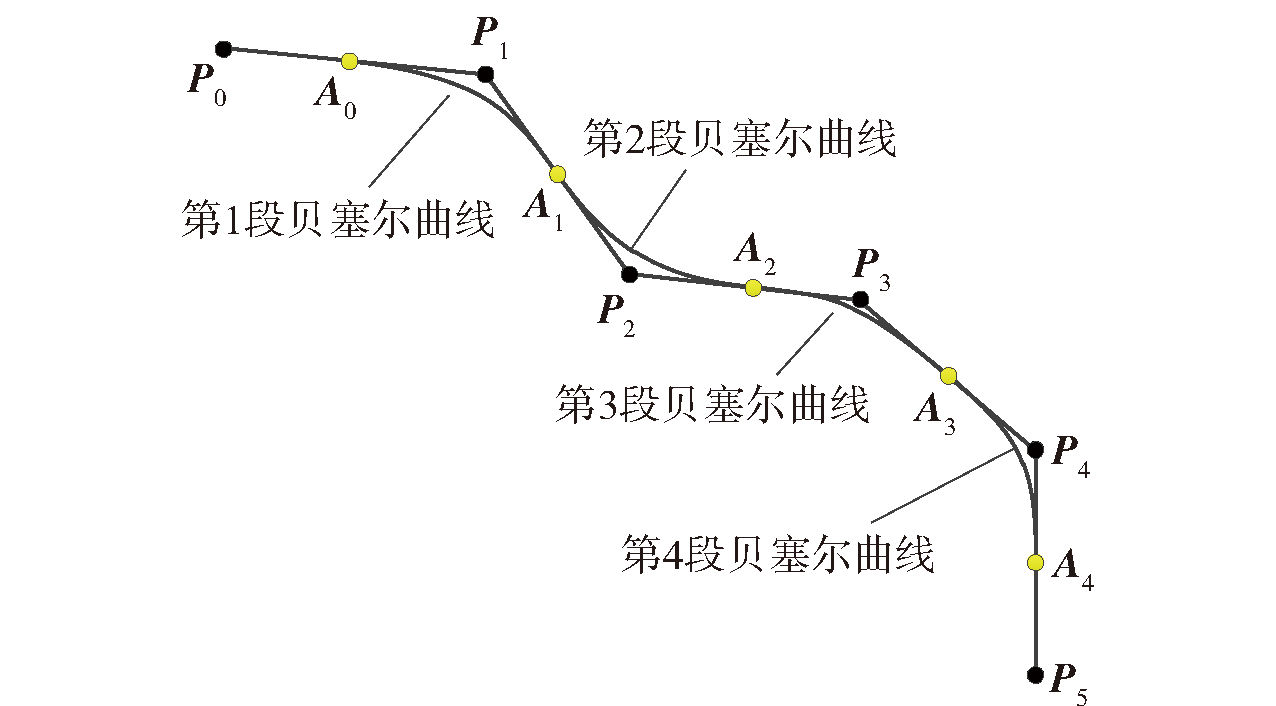
图11 贝塞尔曲线拟合路径
Fig.11 Bezier curve fitting path

图12 最大转角参数实验结果
Fig.12 Experimental results of maximum rotation angle parameter
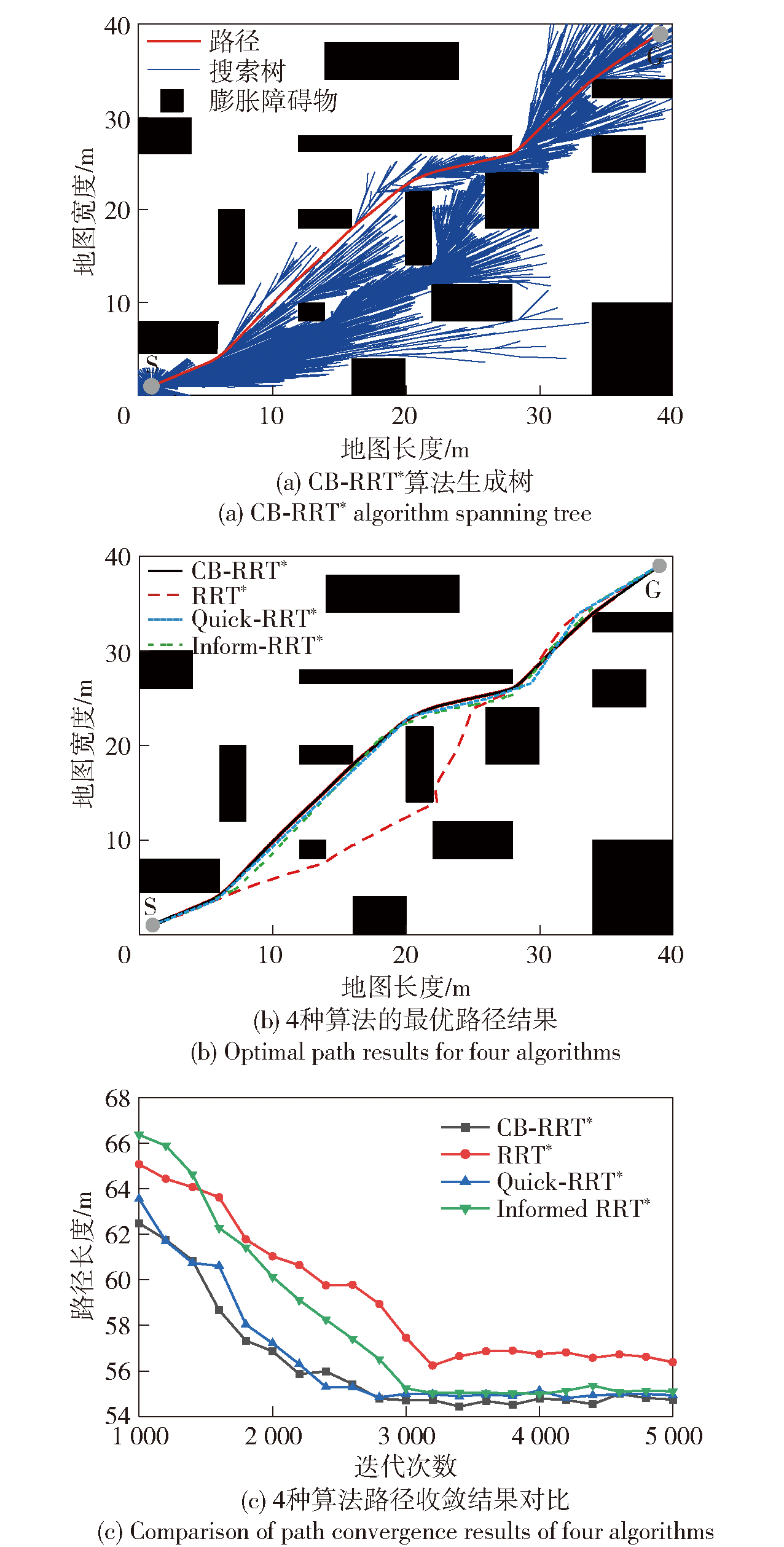
图13 稠密障碍物环境实验结果
Fig.13 Experimental results of dense obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 56.73 | 58.34 | 0.215 |
| Informed RRT* | 55.23 | 55.02 | 0.127 |
| Quick-RRT* | 55.16 | 59.80 | 0.139 |
| CB-RRT* | 54.80 | 56.51 | 0.024 |
表1 稠密障碍物环境中4种算法性能对比
Table 1 Performance comparison of four algorithms in dense obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 56.73 | 58.34 | 0.215 |
| Informed RRT* | 55.23 | 55.02 | 0.127 |
| Quick-RRT* | 55.16 | 59.80 | 0.139 |
| CB-RRT* | 54.80 | 56.51 | 0.024 |
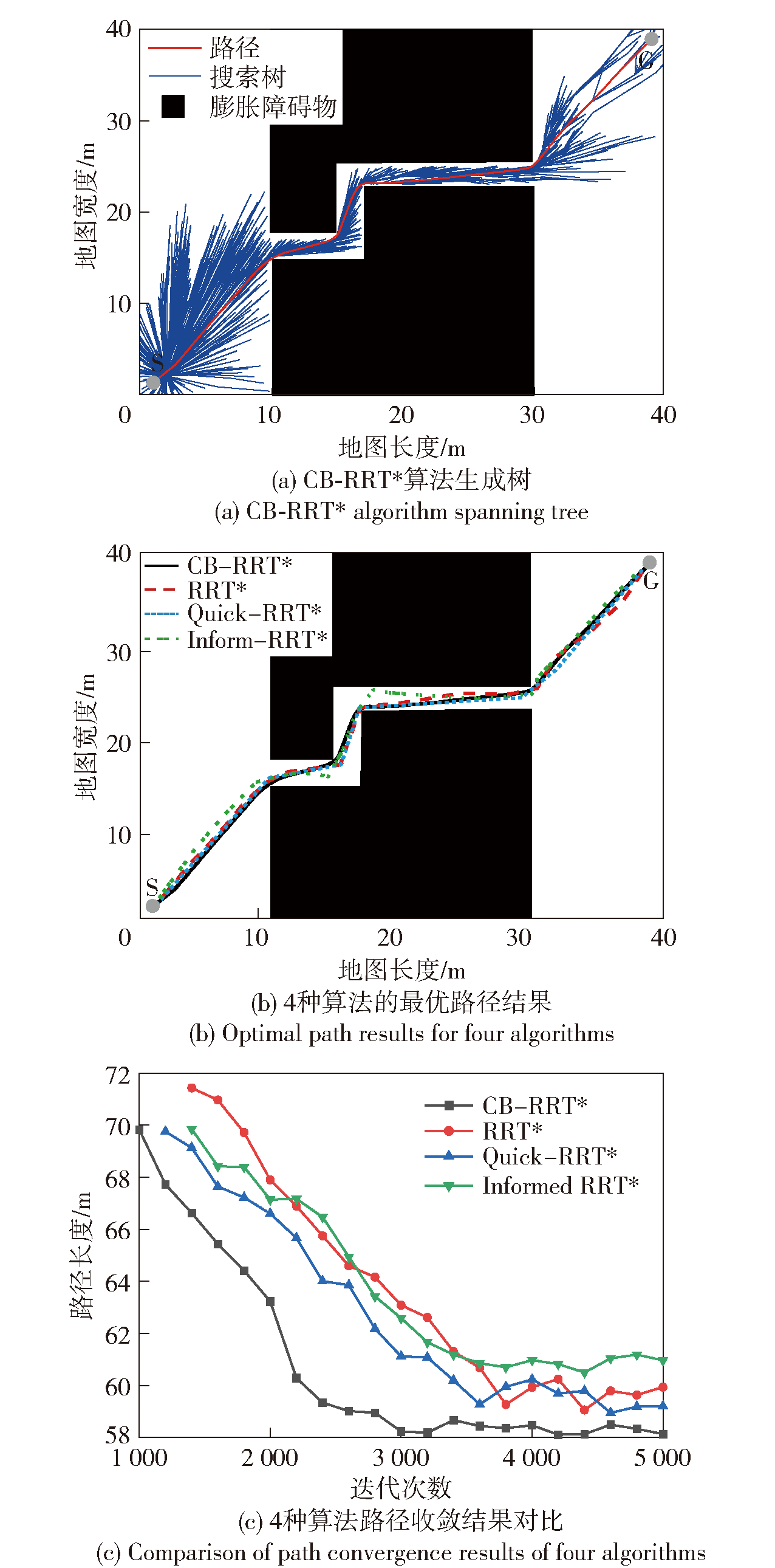
图14 唯一通道环境中实验结果
Fig.14 Experimental results in a single-channel environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 59.13 | 39.38 | 0.149 |
| Informed RRT* | 61.27 | 37.89 | 0.274 |
| Quick-RRT* | 59.22 | 38.86 | 0.116 |
| CB-RRT* | 58.23 | 33.76 | 0.037 |
表2 唯一通道环境中4种算法性能对比
Table 2 Performance comparison of four algorithms in a unique channel environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 59.13 | 39.38 | 0.149 |
| Informed RRT* | 61.27 | 37.89 | 0.274 |
| Quick-RRT* | 59.22 | 38.86 | 0.116 |
| CB-RRT* | 58.23 | 33.76 | 0.037 |
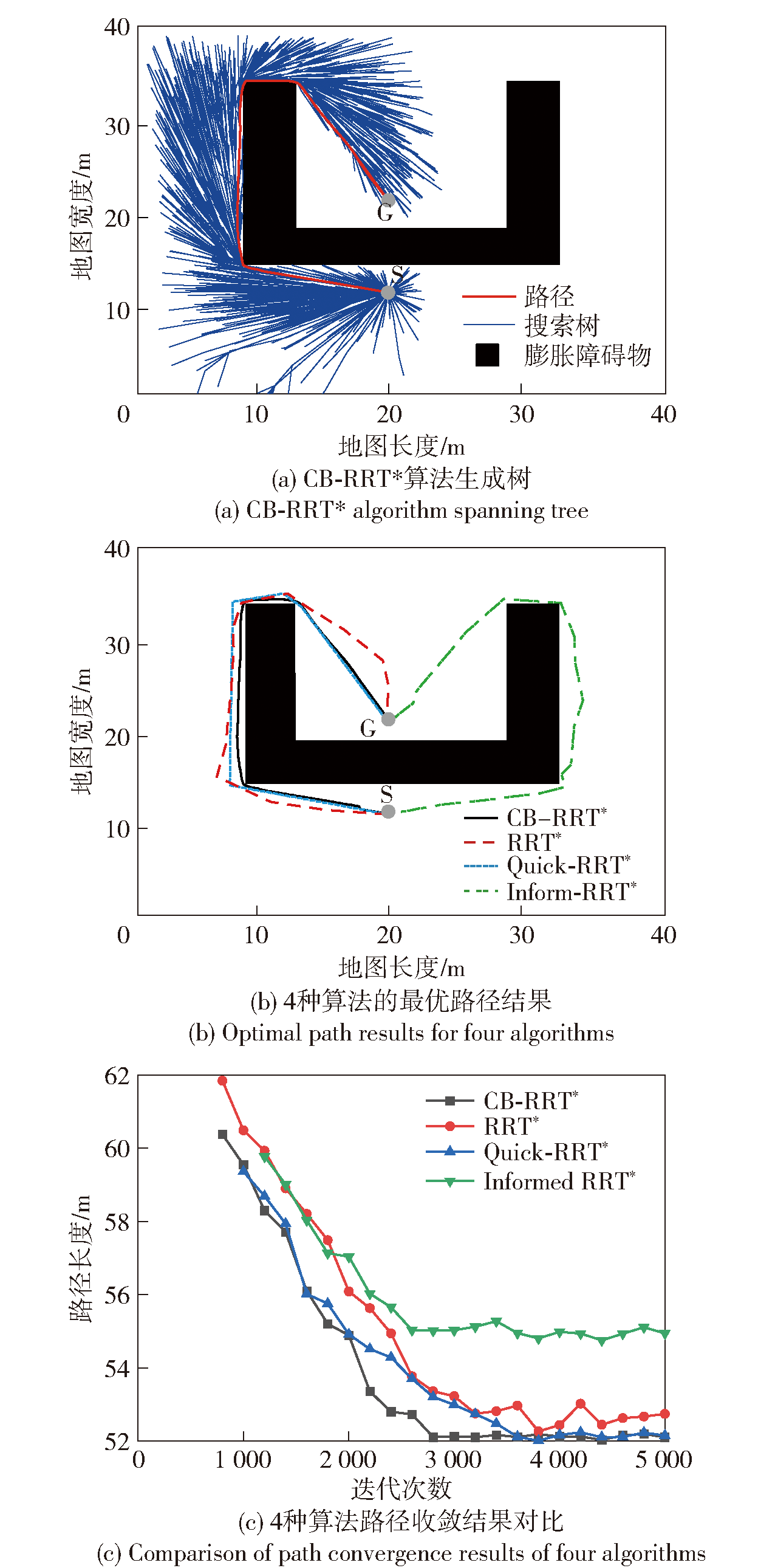
图15 U形障碍物环境中实验结果
Fig.15 Experimental results in U-shaped obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 53.63 | 76.48 | 0.230 |
| Informed RRT* | 55.06 | 69.67 | 0.272 |
| Quick-RRT* | 52.54 | 72.75 | 0.174 |
| CB-RRT* | 52.10 | 71.32 | 0.057 |
表3 U形障碍物环境中4种算法性能对比
Tab.3 Performance comparison of four algorithms in U-shaped obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 53.63 | 76.48 | 0.230 |
| Informed RRT* | 55.06 | 69.67 | 0.272 |
| Quick-RRT* | 52.54 | 72.75 | 0.174 |
| CB-RRT* | 52.10 | 71.32 | 0.057 |
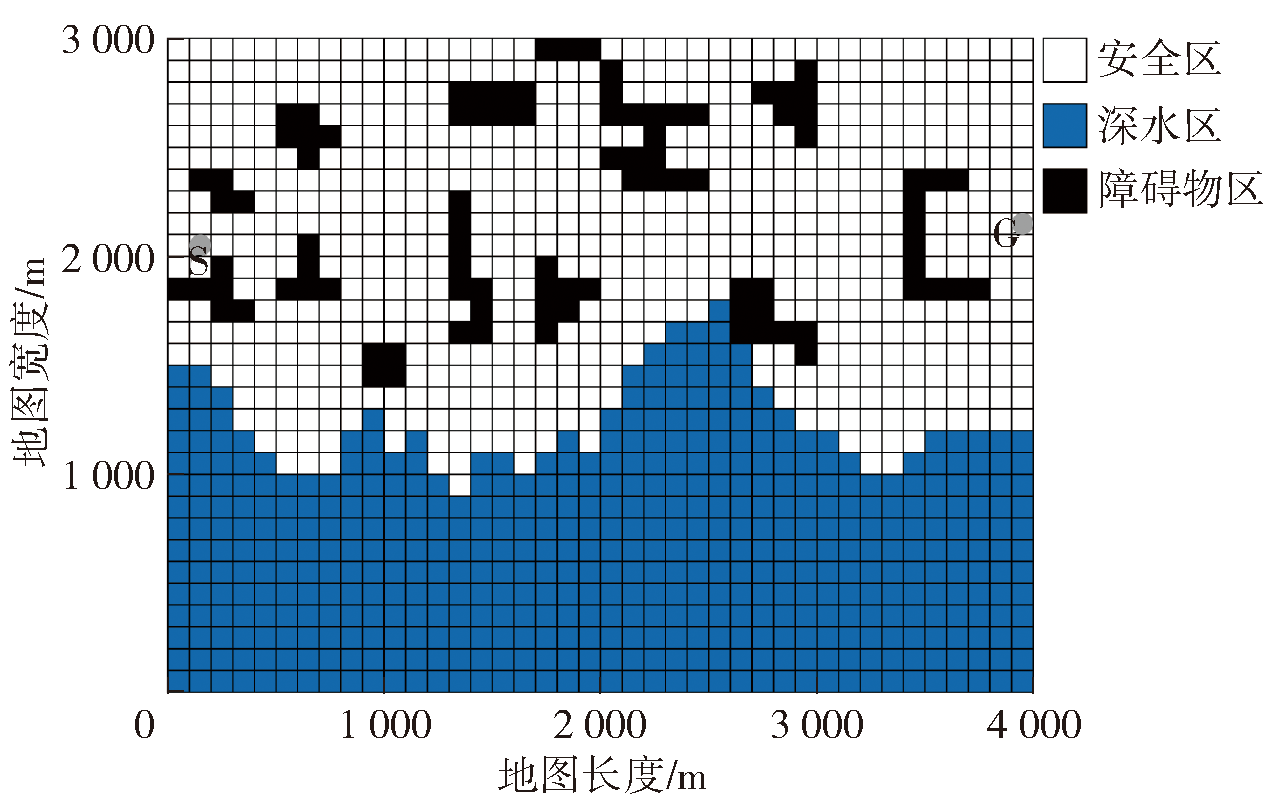
图16 动态滩涂环境
Fig.16 Dynamic tidal flat environment
| 算法 | 路径规划序号 | 长度/m | 时间/s | 曲率 |
|---|---|---|---|---|
| RRT* | 1 | 4229.61 | 96.71 | 0.105 |
| 2 | 1541.34 | 59.60 | 0.114 | |
| Informed RRT* | 1 | 4474.95 | 90.36 | 0.179 |
| 2 | 1736.04 | 64.28 | 0.137 | |
| Quick-RRT* | 1 | 4297.38 | 98.47 | 0.162 |
| 2 | 1640.25 | 63.91 | 0.130 | |
| CB-RRT* | 1 | 4154.26 | 82.04 | 0.047 |
| 2 | 1534.79 | 37.44 | 0.037 |
表4 动态滩涂环境中4中算法性能对比
Table 4 Performance comparison of four algorithms in dynamic tidal flat environment
| 算法 | 路径规划序号 | 长度/m | 时间/s | 曲率 |
|---|---|---|---|---|
| RRT* | 1 | 4229.61 | 96.71 | 0.105 |
| 2 | 1541.34 | 59.60 | 0.114 | |
| Informed RRT* | 1 | 4474.95 | 90.36 | 0.179 |
| 2 | 1736.04 | 64.28 | 0.137 | |
| Quick-RRT* | 1 | 4297.38 | 98.47 | 0.162 |
| 2 | 1640.25 | 63.91 | 0.130 | |
| CB-RRT* | 1 | 4154.26 | 82.04 | 0.047 |
| 2 | 1534.79 | 37.44 | 0.037 |

图17 滩涂环境下4种算法的路径规划结果
Fig.17 Path planning results of four algorithms in tidal flat environment
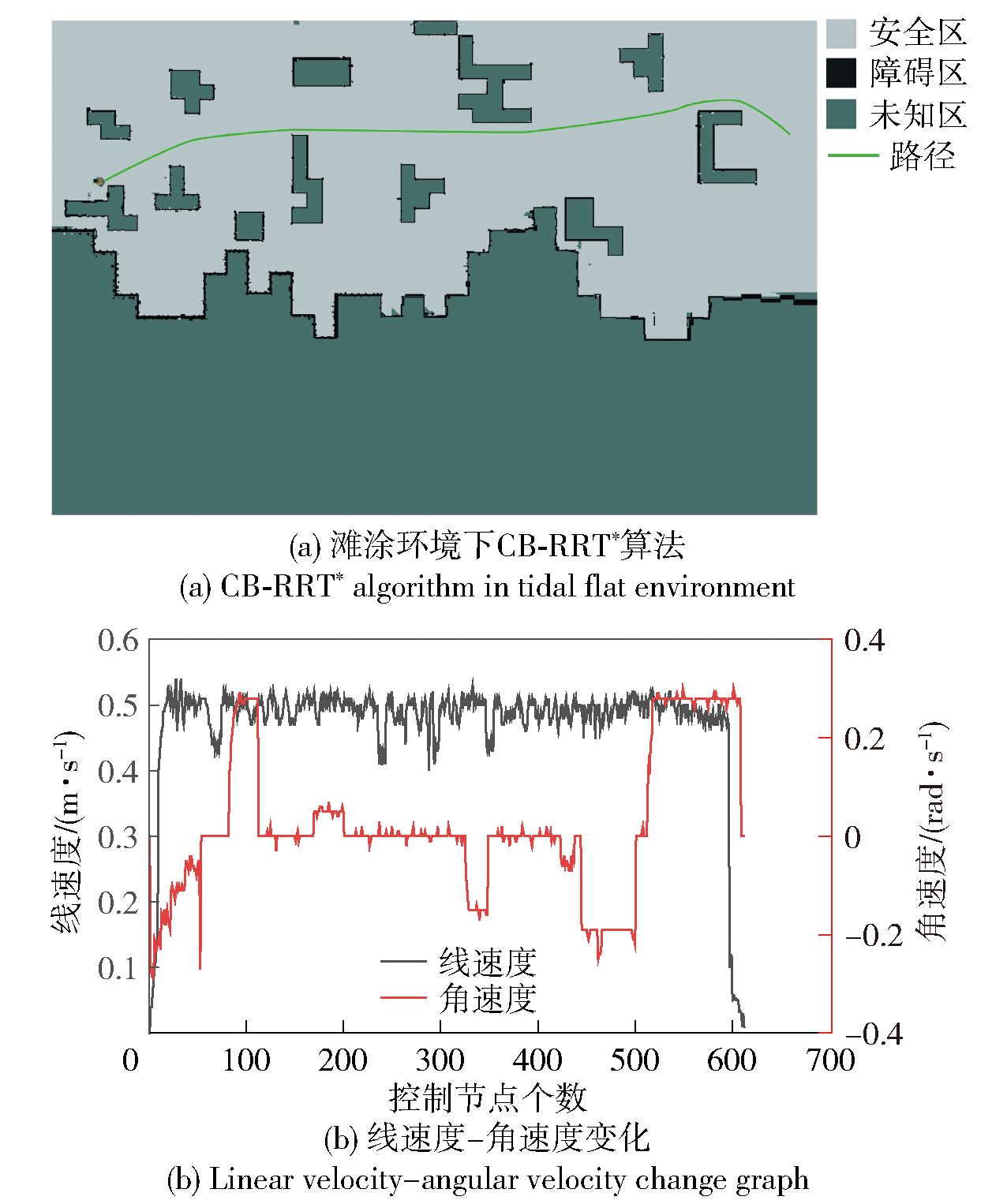
图18 滩涂环境路径规划结果
Fig.18 Result of tidal flat environment path planning
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
李东方, 王超, 邓宏彬, 等. 基于人工势场和RRT算法的机器蛇水下三维避障算法[J]. 兵工学报, 2017, 38(增刊1): 205-214.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
徐唐进, 张安民, 高邈, 等. 动态水深环境下的无人艇路径规划[J]. 测绘科学, 2021, 46(6): 180-189.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
陈秋莲, 蒋环宇, 郑以君. 机器人路径规划的快速扩展随机树算法综述[J]. 计算机工程与应用, 2019, 55(16): 10-17.
doi: 10.3778/j.issn.1002-8331.1905-0061 |
|
|
|
| [12] |
|
| [13] |
|
| [14] |
张卫波, 肖继亮. 改进RRT算法在复杂环境下智能车路径规划中的应用[J]. 中国公路学报, 2021, 34(3): 225-234.
doi: 10.19721/j.cnki.1001-7372.2021.03.017 |
|
|
|
| [15] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
|
|
| [16] |
|
| [17] |
徐岩, 崔媛媛. 基于Q-IGA动态拟合贝塞尔曲线的路径规划[J]. 湖南大学学报(自然科学版), 2020, 47(10): 68-75.
|
|
|
|
| [18] |
谭建豪, 潘豹, 王耀南, 等. 基于改进RRT*FN算法的机器人路径规划[J]. 控制与决策, 2021, 36(8): 1834-1840.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [1] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [2] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [3] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [4] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [5] | 胡致远, 王征, 杨洋, 尹洋. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684. |
| [6] | 郭威, 吴凯, 周悦, 孙洪鸣, 徐高飞, 高森. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6): 1387-1394. |
| [7] | 张韬, 项祺, 郑婉文, 孙宇祥, 周献中. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968. |
| [8] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [9] | 赵鹏程, 宋保维, 毛昭勇, 丁文俊. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608. |
| [10] | 田洪清, 王建强, 黄荷叶, 丁峰. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505. |
| [11] | 邓海鹏, 麻斌, 赵海光, 吕良, 刘宇. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| [12] | 孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10): 2106-2121. |
| [13] | 黄涛, 刘志兵, 王西彬, 潘霖, 闫正虎, 冷寿阳. 刀轴侧倾角对薄壁叶片加工变形的影响[J]. 兵工学报, 2018, 39(3): 577-583. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4