
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (5): 240549-.doi: 10.12382/bgxb.2024.0549
所属专题: 蓝色智慧·兵器科学与技术
闫啸家1, 朱惠民1, 孙世岩1,*( ), 石章松1, 姜尚2
), 石章松1, 姜尚2
收稿日期:2024-07-04
上线日期:2025-05-07
通讯作者:
基金资助:
YAN Xiaojia1, ZHU Huimin1, SUN Shiyan1,*(), SHI Zhangsong1, JIANG Shang2
Received:2024-07-04
Online:2025-05-07
摘要:
针对无人机光电平台受到严重非线性因素影响,从而导致目标定位精度显著降低的问题,提出一种基于改进变异萤火虫优化粒子滤波(Improved Mutant Firefly Algorithm-Particle Filter,IMFA-PF)算法,用于无人机对地面目标精确定位。首先,建立无人机光电平台目标观测的状态方程和测量方程;利用IMFA-PF算法对目标地理位置进行估计,通过引入多重变异策略和弹力机制来改变粒子之间的相互作用模式,解决由严重非线性因素以及过度优化导致的粒子退化问题;通过一维非线性不稳定仿真系统和实测飞行实验验证了该算法的有效性。实验结果表明,所提算法能够改善粒子分布受观测非线性的影响,有效解决粒子退化的问题,与已有算法相比具有更好的鲁棒性和定位精度。
中图分类号:
闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-.
YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning[J]. Acta Armamentarii, 2025, 46(5): 240549-.

图1 基本坐标系示意图
Fig.1 Basic coordinate systems
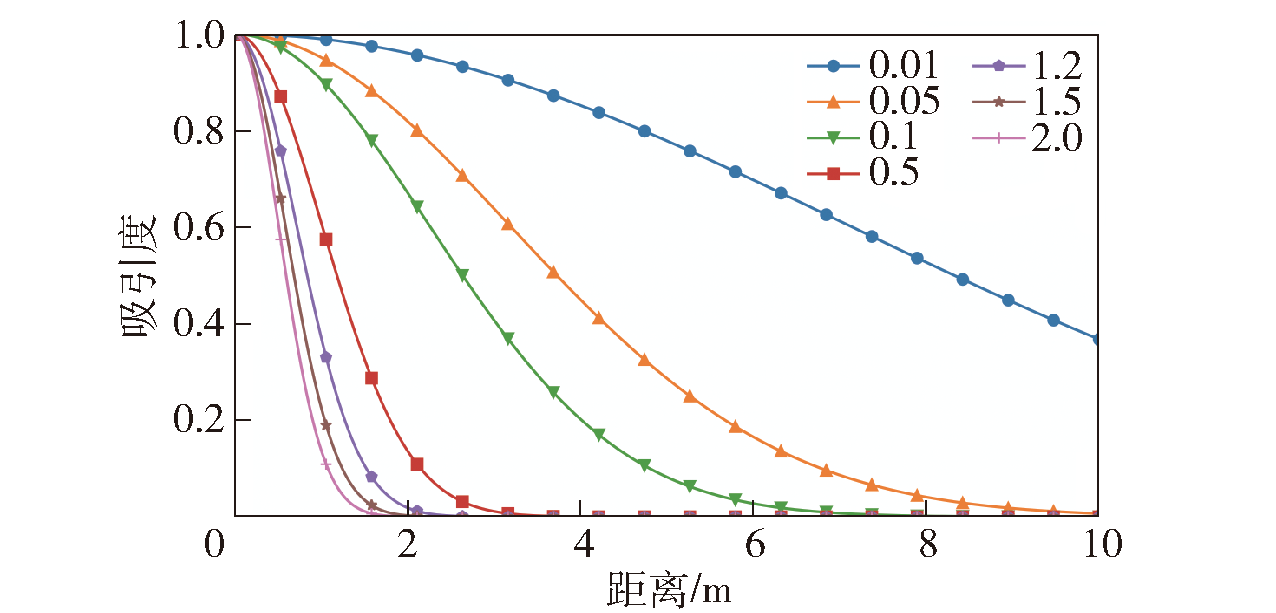
图2 不同光强衰减系数的粒子吸引度变化曲线
Fig.2 Variation of particle attraction for different light intensity attenuation coefficients
| 各滤波方法 | α | λ | fmin | fmax | εs | Ni | β0 | γ | rj | ρth | k | F |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BAPF | 0.5 | 0.5 | 0 | 2 | ||||||||
| SFA-PF | 0.5 | 10 | 1 | 0.01 | 1 | 0.6 | 1 | |||||
| IMFA-PF | 0.1 | 10 | 0.6 | 1 | 0.5 |
表1 不同算法参数设置
Table 1 Parameter settings for different algorithms
| 各滤波方法 | α | λ | fmin | fmax | εs | Ni | β0 | γ | rj | ρth | k | F |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BAPF | 0.5 | 0.5 | 0 | 2 | ||||||||
| SFA-PF | 0.5 | 10 | 1 | 0.01 | 1 | 0.6 | 1 | |||||
| IMFA-PF | 0.1 | 10 | 0.6 | 1 | 0.5 |

图3 系统滤波状态估计
Fig.3 System filter state estimation
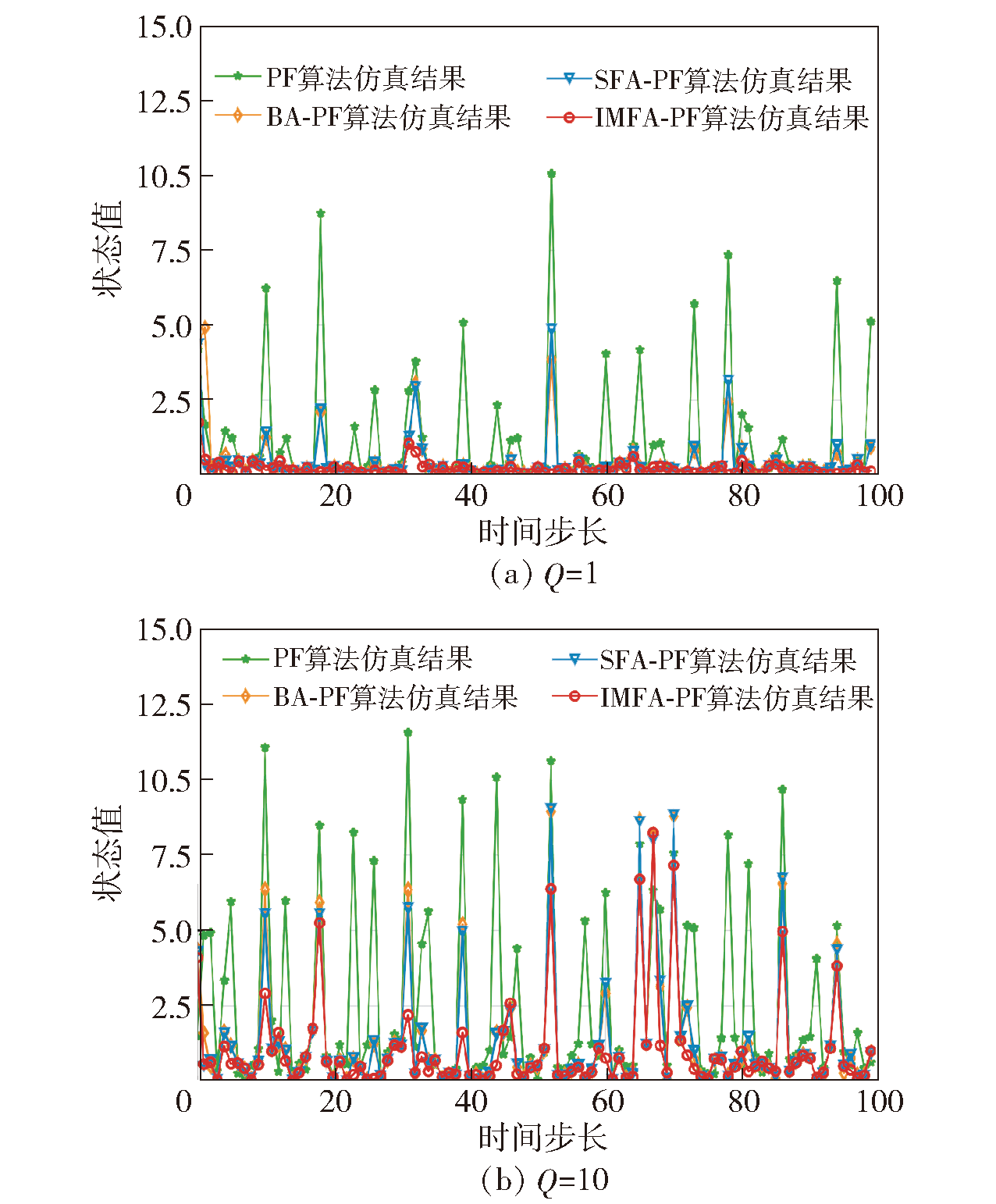
图4 估计误差绝对值
Fig.4 Absolute value of estimation error

图5 不同时刻粒子分布
Fig.5 Particle distributions at different moments
| 滤波算法 | RMSEmean/m | RMSEvar/m | Tmean/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 200 | 50 | 100 | 200 | 50 | 100 | 200 | |
| PF | 4.1681 | 3.7164 | 3.5702 | 0.2642 | 0.3028 | 0.0935 | 0.0879 | 0.0936 | 0.1154 |
| BA-PF | 2.9312 | 2.5331 | 2.4170 | 0.0906 | 0.0693 | 0.0742 | 0.1117 | 0.1421 | 0.2132 |
| SFA-FA | 2.2711 | 2.1028 | 2.0057 | 0.0842 | 0.0730 | 0.0704 | 0.1313 | 0.1759 | 0.2698 |
| IMFA-PF | 2.0693 | 1.9371 | 1.9022 | 0.0791 | 0.0734 | 0.0699 | 0.1549 | 0.2037 | 0.3214 |
表2 不同PF算法仿真结果比较
Table 2 Comparison of simulated results of different PF algorithms
| 滤波算法 | RMSEmean/m | RMSEvar/m | Tmean/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 200 | 50 | 100 | 200 | 50 | 100 | 200 | |
| PF | 4.1681 | 3.7164 | 3.5702 | 0.2642 | 0.3028 | 0.0935 | 0.0879 | 0.0936 | 0.1154 |
| BA-PF | 2.9312 | 2.5331 | 2.4170 | 0.0906 | 0.0693 | 0.0742 | 0.1117 | 0.1421 | 0.2132 |
| SFA-FA | 2.2711 | 2.1028 | 2.0057 | 0.0842 | 0.0730 | 0.0704 | 0.1313 | 0.1759 | 0.2698 |
| IMFA-PF | 2.0693 | 1.9371 | 1.9022 | 0.0791 | 0.0734 | 0.0699 | 0.1549 | 0.2037 | 0.3214 |

图6 实测飞行实验系统和飞行航线
Fig.6 Test flight experimental systems and flight paths
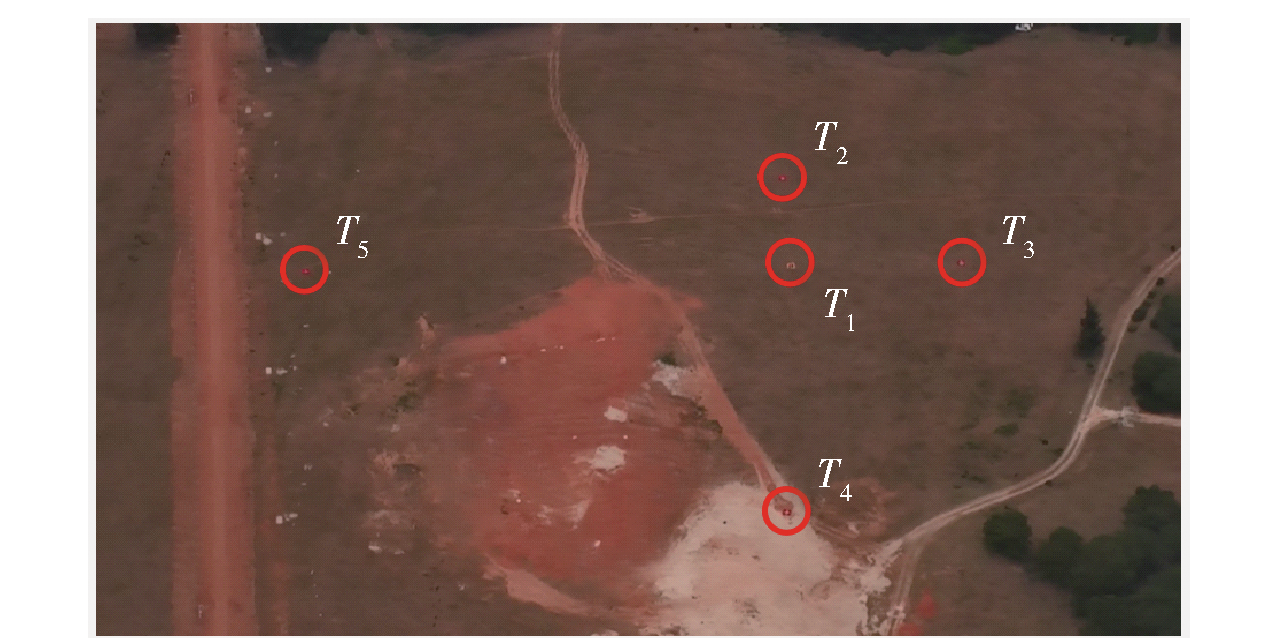
图7 无人机的成像图像
Fig.7 Imaging of UAVs

图8 PF与IMFA-PF算法实测结果对比(N=50)
Fig.8 Measured results of PF and IMFA-PF algorithm (N=50)

图9 PF与IMFA-PF算法实测结果对比(N=500)
Fig.9 Measured results of PF and IMFA-PF algorithm (N=500)
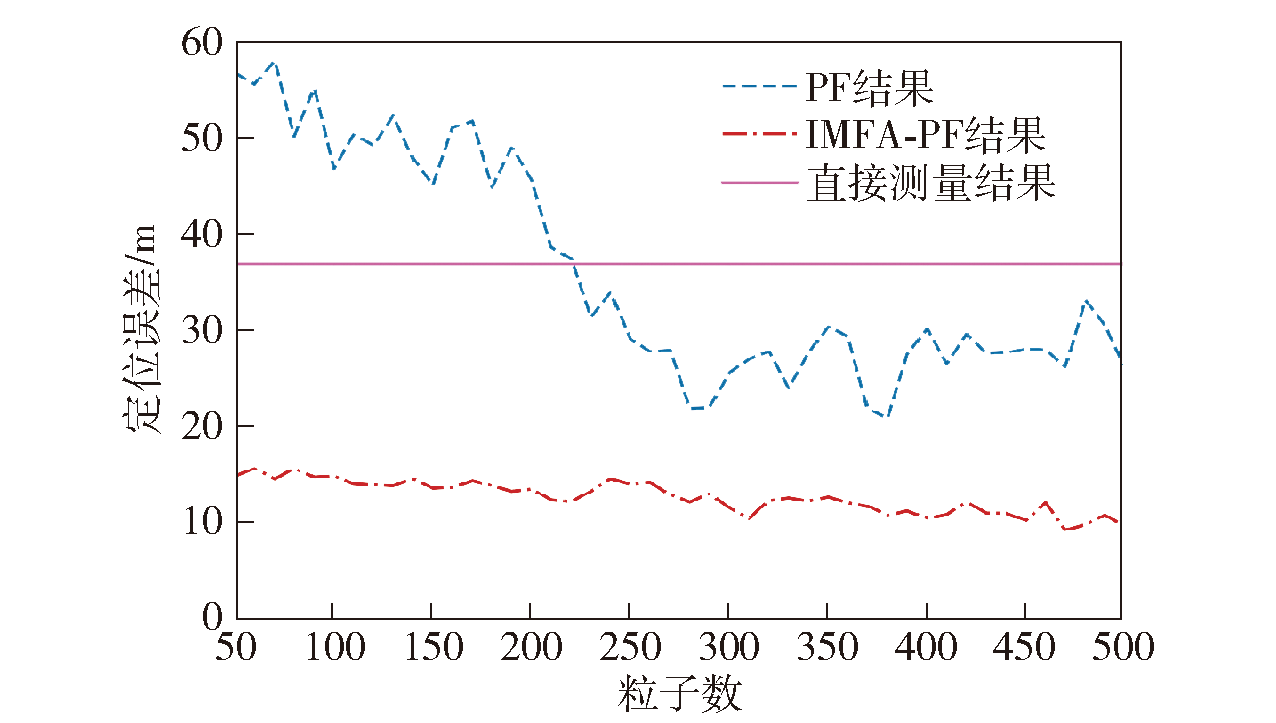
图10 最终定位误差曲线图
Fig.10 Final positioning error curve
| 算法 | 性能指标 | 目标 | ||||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||
| PF | 平均RMSE/m | 29.21 | 29.45 | 31.69 | 34.54 | 35.97 |
| 运算时间/s | 0.926 | |||||
| BA-PF | 平均RMSE/m | 17.33 | 17.99 | 17.46 | 18.97 | 19.31 |
| 运算时间/s | 1.024 | |||||
| SFA-FA | 平均RMSE/m | 14.20 | 15.63 | 15.44 | 17.69 | 18.14 |
| 运算时间/s | 1.309 | |||||
| IMFA-PF | 平均RMSE/m | 10.82 | 10.69 | 11.34 | 12.46 | 12.90 |
| 运算时间/s | 1.554 | |||||
表3 不同算法定位精度和运算时间
Table 3 Positioning accuracies and computation times of different algorithms
| 算法 | 性能指标 | 目标 | ||||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||
| PF | 平均RMSE/m | 29.21 | 29.45 | 31.69 | 34.54 | 35.97 |
| 运算时间/s | 0.926 | |||||
| BA-PF | 平均RMSE/m | 17.33 | 17.99 | 17.46 | 18.97 | 19.31 |
| 运算时间/s | 1.024 | |||||
| SFA-FA | 平均RMSE/m | 14.20 | 15.63 | 15.44 | 17.69 | 18.14 |
| 运算时间/s | 1.309 | |||||
| IMFA-PF | 平均RMSE/m | 10.82 | 10.69 | 11.34 | 12.46 | 12.90 |
| 运算时间/s | 1.554 | |||||
| [1] |
|
| [2] |
吴岸平, 郭正, 侯中喜, 等. 不确定环境下无人机区域目标搜索及载荷参数影响[J]. 国防科技大学学报, 2020, 42(4):35-42.
|
|
|
|
| [3] |
王东振, 张岳, 赵宇, 等. 基于RRT-Dubins的无人机航迹优化方法[J]. 兵工学报, 2024, 45(8):2761-2773.
doi: 10.12382/bgxb.2023.0611 |
|
doi: 10.12382/bgxb.2023.0611 |
|
| [4] |
任双, 周洁, 高嵩, 等. 基于注意力机制的无人机集群协同分群控制算法[J]. 电子学报, 2023, 51(7):1898-1905.
doi: 10.12263/DZXB.20221378 |
|
|
|
| [5] |
宫远强, 张业鹏, 马万鹏, 等. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9):2661-2671.
doi: 10.12382/bgxb.2022.1181 |
|
|
|
| [6] |
朱惠民, 贾正荣, 王航宇, 等. 针对不同视场辅助信标的无人机目标定位方法[J]. 国防科技大学学报, 2019, 41(3):125-136.
|
|
|
|
| [7] |
|
| [8] |
陈晨, 关棒磊, 尚洋, 等. 受限观测条件下光电对地定位的全局最优化方法[J]. 光学学报, 2023, 43(12):144-152.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1109/TIP.2022.3157450 pmid: 35286258 |
| [14] |
田丹, 陈钰坤. 基于改进ORB算法的遥感图像匹配[J]. 沈阳大学学报(自然科学版), 2024, 36(1):34-39.
|
|
|
|
| [15] |
唐大全, 柳向阳, 邓伟栋, 等. 基于迭代无迹卡尔曼滤波的小型无人机目标定位方法[J]. 指挥控制与仿真, 2019, 41(1):104-108.
doi: 10.3969/j.issn.1673-3819.2019.01.021 |
|
|
|
| [16] |
陈丹琪, 金国栋, 谭力宁, 等. 基于非线性最小二乘法的无人机机载光电平台目标定位[J]. 光电工程, 2019, 46(9):84-92.
|
|
|
|
| [17] |
白冠冰, 宋悦铭, 左羽佳, 等. 机载光电平台的对地多目标定位[J]. 光学精密工程, 2020, 28(10):2323-2336.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
吴学礼, 高锋, 甄然. 一种基于改进萤火虫算法优化粒子滤波的轨迹预测的方法:201910587699.9[P].2019-07-02.
|
|
|
|
| [22] |
李美红, 尹健, 徐劲祥. 基于EKF的机载光电吊舱目标定位研究[J]. 弹箭与制导学报, 2016, 36(6):157-161.
|
|
|
|
| [23] |
文尚胜, 丘志强, 许函铭, 等. 基于差分算法优化的自复位粒子滤波算法[J]. 华南理工大学学报(自然科学版), 2023, 51(3):133-145.
doi: 10.12141/j.issn.1000-565X.220368 |
|
|
|
| [24] |
陈志敏, 田梦楚, 吴盘龙, 等. 基于蝙蝠算法的粒子滤波法研究[J]. 物理学报, 2017, 66(5):47-56.
|
|
|
|
| [25] |
田梦楚, 柳林燕, 陈志敏, 等. 基于弹性机制的萤火虫优化粒子滤波算法[J]. 控制与决策, 2024, 39(2):420-428.
|
|
|
| [1] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [2] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [3] | 何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-. |
| [4] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [5] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [6] | 曾照洋, 彭文胜, 李云凯, 徐明. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3): 240322-. |
| [7] | 刘聪, 李百庆, 张宗卫, 单泽众. 水平来流作用下无人机旋翼多维气动特征研究[J]. 兵工学报, 2025, 46(3): 240316-. |
| [8] | 张奉林, 董轶昊, 辛建社, 郭丽萍, 谷雪晨, 曲家琦. 基于粒子群的小型无人机低过载压缩空气发射参数选择和优化算法[J]. 兵工学报, 2025, 46(2): 240014-. |
| [9] | 杨绪祺, 谭启凡, 苏航, 谭浩. 面向无人机视觉制导的自适应目标跟踪方法[J]. 兵工学报, 2025, 46(2): 240284-. |
| [10] | 侯鹏, 葛玉雪, 裴扬, 岳源, 艾俊强. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2): 240212-. |
| [11] | 孙海文, 韩啸, 陈婷, 李丹, 李烨, 靳子荣. 无人机蜂群攻击意图判断方法研究[J]. 兵工学报, 2024, 45(S2): 25-35. |
| [12] | 姚雨, 宋春林, 邵江琦. 无人机航拍军事车辆实时检测及定位算法[J]. 兵工学报, 2024, 45(S1): 354-360. |
| [13] | 胡明哲, 李旭光, 任智颖, 曾帅. 基于改进启发函数的A*算法的无人机三维路径规划[J]. 兵工学报, 2024, 45(S1): 302-307. |
| [14] | 李茂, 赵明韬, 沙世超, 李霄, 华卫红. 无人机激光中继重定向能量传输装置的聚焦策略及效果分析[J]. 兵工学报, 2024, 45(S1): 316-321. |
| [15] | 潘子双, 苏析超, 韩维, 柳文林, 郁大照, 汪节. 基于动态一致性联盟算法的异构无人机集群协同作战联盟组建[J]. 兵工学报, 2024, 45(9): 3177-3190. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4