
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (9): 240881-.doi: 10.12382/bgxb.2024.0881
胡据林1, 何洪文1,*( ), 韩雪峰2
), 韩雪峰2
收稿日期:2024-09-20
上线日期:2025-09-24
通讯作者:
基金资助:
HU Julin1, HE Hongwen1,*(), HAN Xuefeng2
Received:2024-09-20
Online:2025-09-24
摘要:
为对履带式动力平台进行评估,提出一种基于微运动片段的多路面三维度工况构建方法,旨在解决履带式车辆工况构建中路面类型多、短行程片段较长及影响因素维度多等问题。通过对采集的履带车辆行驶数据进行清洗,并提取行驶片段的速度、角速度及地面行驶阻力系数等三维度数据,结合K-means聚类方法,将行驶片段分类为铺面路、砂石路和起伏土路3种典型路面。依据短行程片段的最小加权三维变化率,将其切分为微运动片段,并进行特征提取与聚类分析。基于微运动片段马尔可夫转移概率构建三维度循环工况,并提出相应的综合评价体系。构建的工况总时长约2000s,3种路面的平均特征覆盖率达到94.63%,真实反映了履带式车辆的行驶特性,具备较高的代表性,为履带式车辆的仿真和台架测试提供了有效工具。
胡据林, 何洪文, 韩雪峰. 基于微运动片段的履带式车辆多路面-三维度工况构建方法[J]. 兵工学报, 2025, 46(9): 240881-.
HU Julin, HE Hongwen, HAN Xuefeng. A Multiple-road Type, Three-dimensional Driving Cycle Construction Method for Tracked Vehicles Based on Micro-motion Segments[J]. Acta Armamentarii, 2025, 46(9): 240881-.
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 5800 | ir | 6.74 |
| δ | 1.2 | fs/Hz | 100 |
| Rd/m | 0.21 | Tmmax/(N·m) | 750 |
| D/m | 1.77 | Nmmax/(r·min-1) | 3300 |
表1 测试车辆主要参数
Table 1 Main parameters of test vehicle
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 5800 | ir | 6.74 |
| δ | 1.2 | fs/Hz | 100 |
| Rd/m | 0.21 | Tmmax/(N·m) | 750 |
| D/m | 1.77 | Nmmax/(r·min-1) | 3300 |
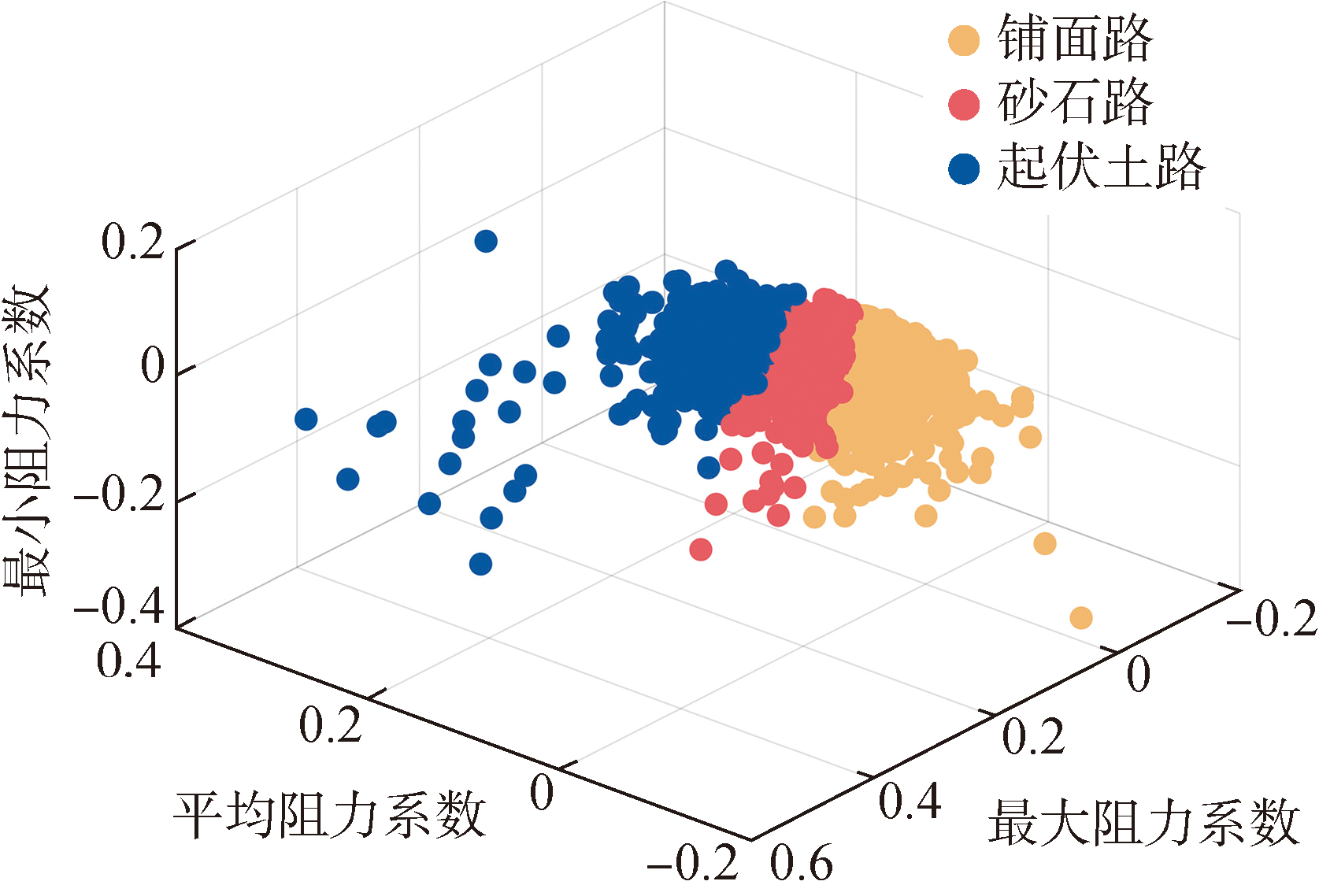
图1 短行程片段路面聚类结果
Fig.1 Road surface clustering results of short-trip segments
| 路面 | 平均速度/ (m·s-1) | 平均加速度/ (m·s-2) | 平均角速度/ (rad·s-1) | 平均阻 力系数 | 片段 数量 |
|---|---|---|---|---|---|
| 铺面路 | 3.72 | 0.176 | 0.055 | 0.015 | 1028 |
| 砂石路 | 2.65 | 0.189 | 0.057 | 0.044 | 776 |
| 起伏土路 | 2.10 | 0.238 | 0.084 | 0.090 | 522 |
表2 短行程片段聚类簇主要参数
Table 2 Main parameters of short-trip segment clusters
| 路面 | 平均速度/ (m·s-1) | 平均加速度/ (m·s-2) | 平均角速度/ (rad·s-1) | 平均阻 力系数 | 片段 数量 |
|---|---|---|---|---|---|
| 铺面路 | 3.72 | 0.176 | 0.055 | 0.015 | 1028 |
| 砂石路 | 2.65 | 0.189 | 0.057 | 0.044 | 776 |
| 起伏土路 | 2.10 | 0.238 | 0.084 | 0.090 | 522 |
| 类别 | 特征值 |
|---|---|
| 速度 | 起始速度vstart/(m·s-1) |
| 结尾速度vend/(m·s-1) | |
| 平均速度 /(m·s-1) | |
| 加速度 | 起始加速度astart/(m·s-2) |
| 结尾加速度aend/(m·s-2) | |
| 平均加速度 /(m·s-2) | |
| 角速度 | 起始角速度wstart/(rad·s-1) |
| 结尾角速度wend/(rad·s-1) | |
| 平均角速度 /(rad·s-1) | |
| 角加速度 | 起始角加速度αstart/(rad·s-2) |
| 结尾角加速度αend/(rad·s-2) | |
| 平均角加速度 /(rad·s-2) | |
| 阻力系数 | 起始阻力系数rstart |
| 结尾阻力系数rend | |
| 平均阻力系数 | |
| 阻力系数变化率 | 起始阻力系数变化率ρstart/s-1 |
| 结尾阻力系数变化率ρend/s-1 | |
| 平均阻力系数变化率 /s-1 |
表3 微运动片段特征
Table 3 Features of micro-motion segments
| 类别 | 特征值 |
|---|---|
| 速度 | 起始速度vstart/(m·s-1) |
| 结尾速度vend/(m·s-1) | |
| 平均速度 /(m·s-1) | |
| 加速度 | 起始加速度astart/(m·s-2) |
| 结尾加速度aend/(m·s-2) | |
| 平均加速度 /(m·s-2) | |
| 角速度 | 起始角速度wstart/(rad·s-1) |
| 结尾角速度wend/(rad·s-1) | |
| 平均角速度 /(rad·s-1) | |
| 角加速度 | 起始角加速度αstart/(rad·s-2) |
| 结尾角加速度αend/(rad·s-2) | |
| 平均角加速度 /(rad·s-2) | |
| 阻力系数 | 起始阻力系数rstart |
| 结尾阻力系数rend | |
| 平均阻力系数 | |
| 阻力系数变化率 | 起始阻力系数变化率ρstart/s-1 |
| 结尾阻力系数变化率ρend/s-1 | |
| 平均阻力系数变化率 /s-1 |
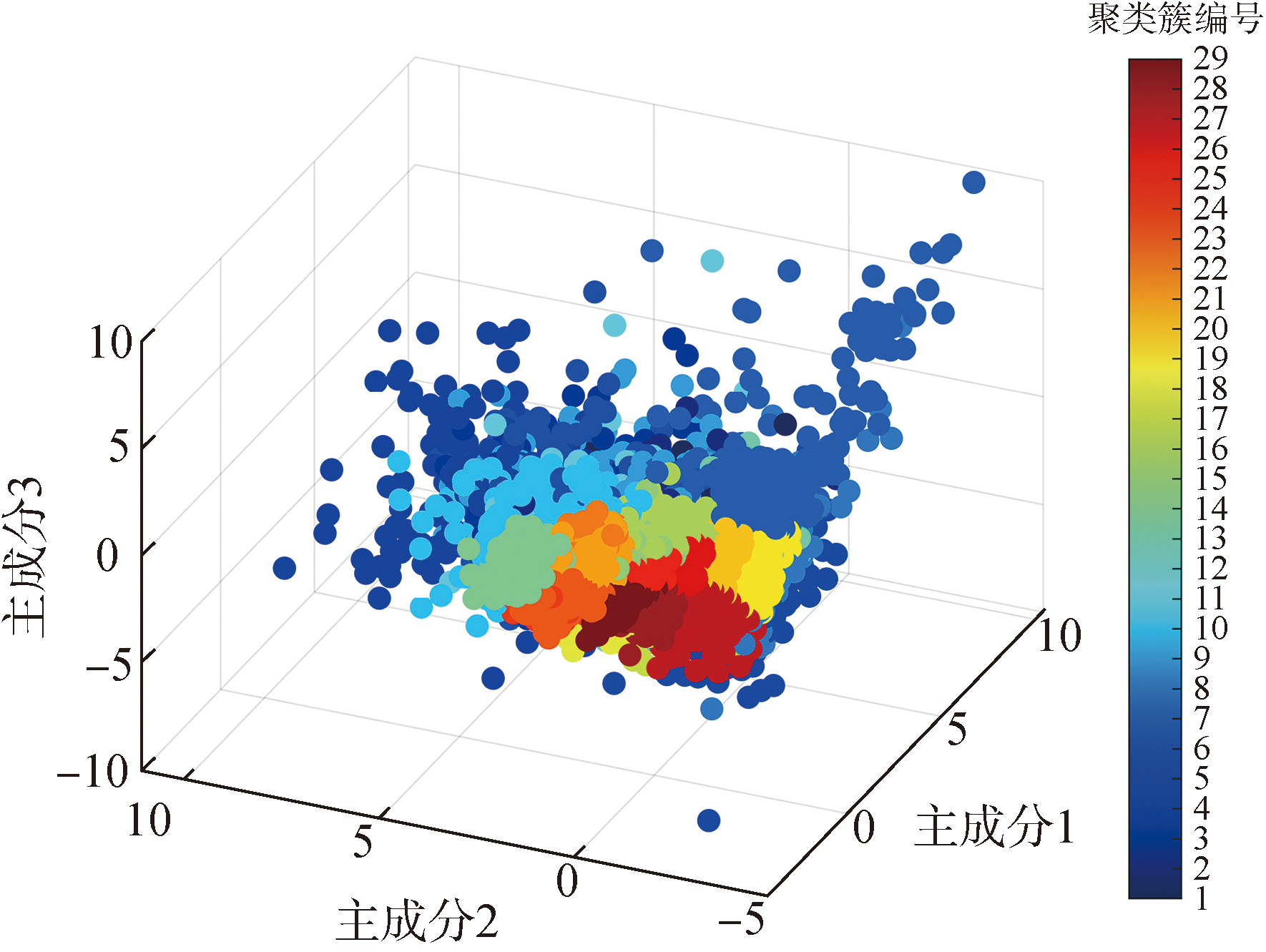
图2 微运动片段聚类结果
Fig.2 Clustering results of micro-motion segments

图3 微运动片段状态转移概率
Fig.3 State transition probabilities of micro-motion segments
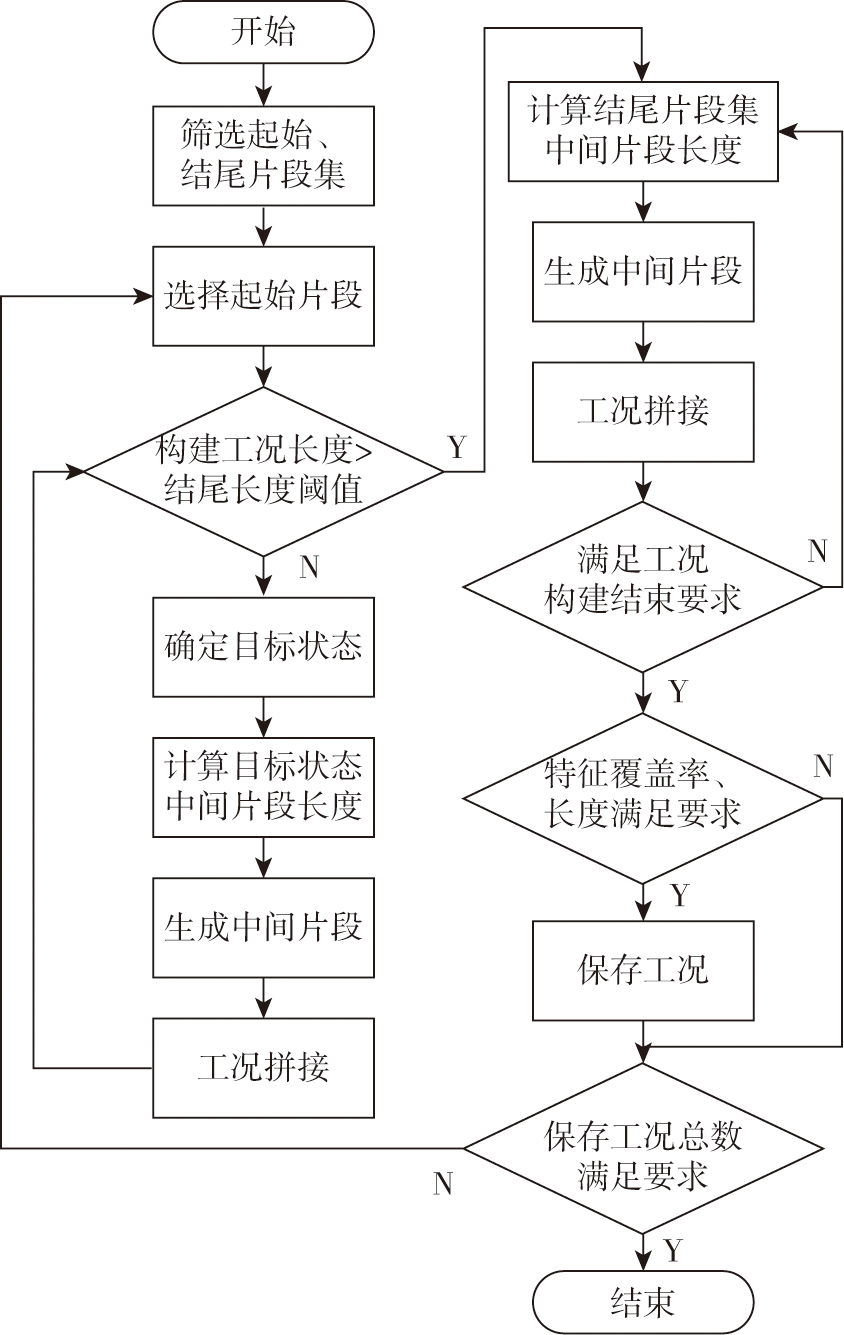
图4 工况构建流程
Fig.4 Flowchart of the driving cycle construction
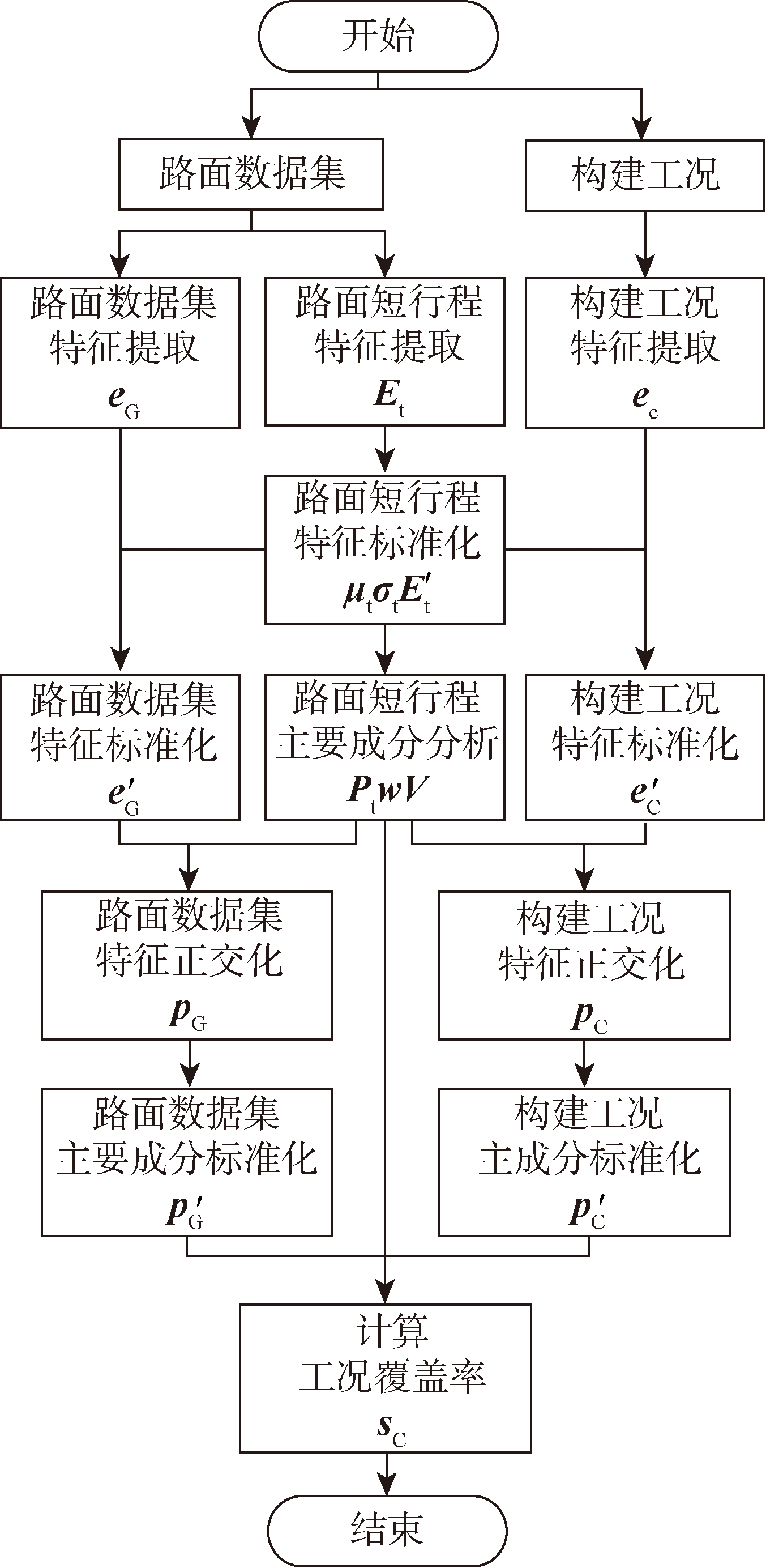
图5 工况评价流程
Fig.5 Flowchart of driving cycle evaluation
| 类别 | 特征值 |
|---|---|
| 速度 | 平均速度 /(m·s-1) |
| 最大速度vmax/(m·s-1) | |
| 速度标准差σv/(m·s-1) | |
| 加速度 | 平均加速度 /(m·s-2) |
| 平均减速度 /(m·s-2) | |
| 最大加速度amax/(m·s-2) | |
| 最小加速度amin/(m·s-2) | |
| 加速度标准差σa/(m·s-2) | |
| 角速度 | 平均转向角速度 /(rad·s-1) |
| 最大转向角速度wmax/(rad·s-1) | |
| 转向角速度标准差σw/(rad·s-1) | |
| 角加速度 | 平均转向角加速度 /(rad·s-2) |
| 平均回正角加速度 /(rad·s-2) | |
| 最大角加速度αmax/(rad·s-2) | |
| 角加速度标准差σα/(rad·s-2) | |
| 侧向加速度 | 平均侧向加速度alat/(m·s-2) |
| 侧向加速度标准差 /(m·s-2) | |
| 阻力系数 | 平均阻力系数 |
| 最大阻力系数rg,max | |
| 最小阻力系数rg,min | |
| 阻力系数标准差 | |
| 阻力系数变化率 | 平均阻力系数变化率 /s-1 |
| 最大阻力系数变化率ρmax/s-1 | |
| 阻力系数变化率标准差σρ/s-1 | |
| 行驶状态比例 | 加速比例pa/% |
| 转向比例ps/% | |
| 上坡比例pu/% |
表4 工况及路面数据集特征值
Table 4 Feature values of driving cycles and road datasets
| 类别 | 特征值 |
|---|---|
| 速度 | 平均速度 /(m·s-1) |
| 最大速度vmax/(m·s-1) | |
| 速度标准差σv/(m·s-1) | |
| 加速度 | 平均加速度 /(m·s-2) |
| 平均减速度 /(m·s-2) | |
| 最大加速度amax/(m·s-2) | |
| 最小加速度amin/(m·s-2) | |
| 加速度标准差σa/(m·s-2) | |
| 角速度 | 平均转向角速度 /(rad·s-1) |
| 最大转向角速度wmax/(rad·s-1) | |
| 转向角速度标准差σw/(rad·s-1) | |
| 角加速度 | 平均转向角加速度 /(rad·s-2) |
| 平均回正角加速度 /(rad·s-2) | |
| 最大角加速度αmax/(rad·s-2) | |
| 角加速度标准差σα/(rad·s-2) | |
| 侧向加速度 | 平均侧向加速度alat/(m·s-2) |
| 侧向加速度标准差 /(m·s-2) | |
| 阻力系数 | 平均阻力系数 |
| 最大阻力系数rg,max | |
| 最小阻力系数rg,min | |
| 阻力系数标准差 | |
| 阻力系数变化率 | 平均阻力系数变化率 /s-1 |
| 最大阻力系数变化率ρmax/s-1 | |
| 阻力系数变化率标准差σρ/s-1 | |
| 行驶状态比例 | 加速比例pa/% |
| 转向比例ps/% | |
| 上坡比例pu/% |

图6 路面路数据集中短行程特征值相关系数
Fig.6 Correlation coefficients of feature values for short-trip segments in road type datasets
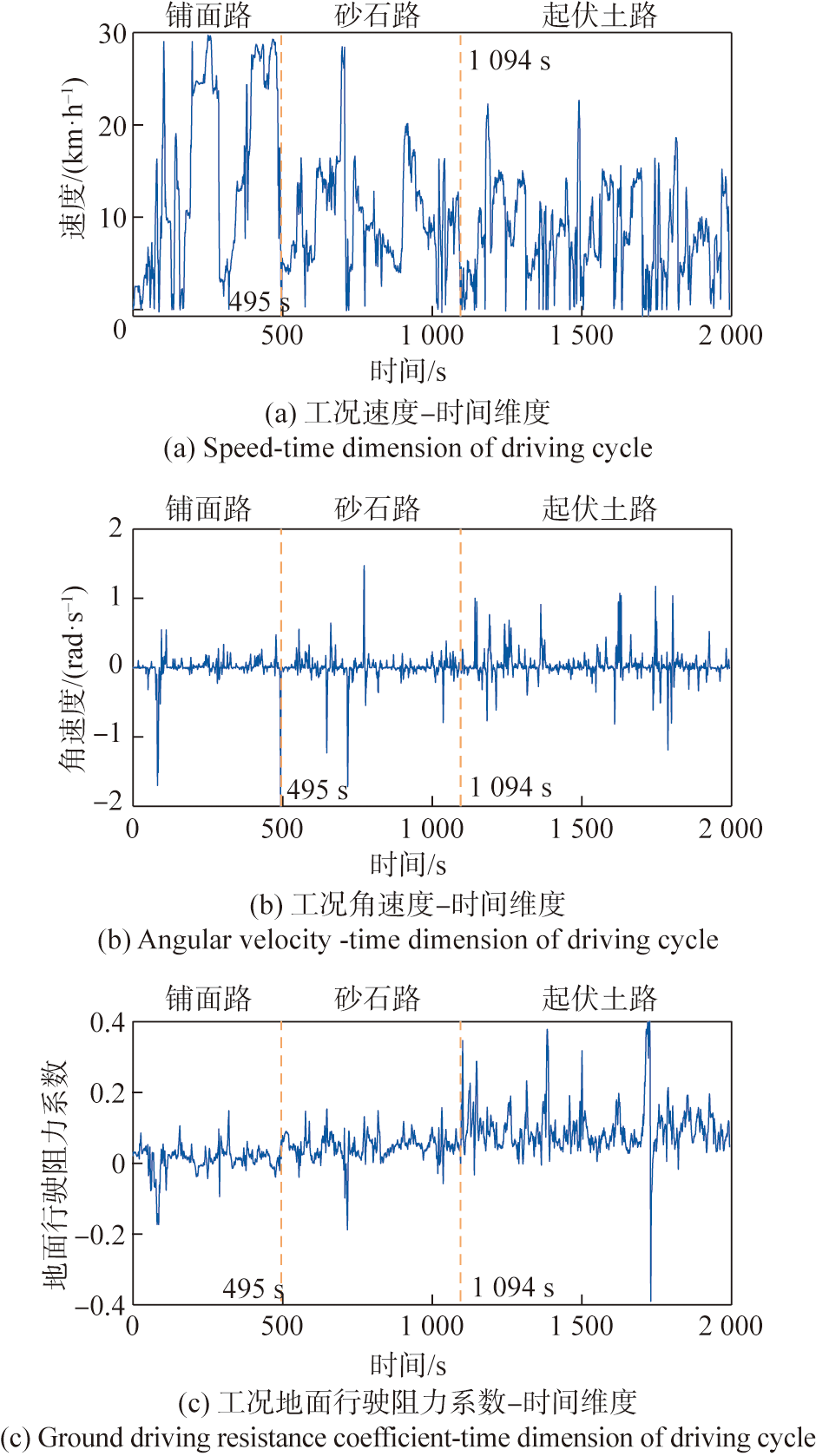
图7 包含3种典型路面的三维度工况构建结果
Fig.7 Three-dimensional driving cycle construction results for three typical road conditions
| 特征值 | 铺面路 | 砂石路 | 起伏土路 |
|---|---|---|---|
| 平均速度/(m·s-1) | 14.686 | 9.767 | 8.050 |
| 最大速度/(m·s-1) | 29.717 | 28.465 | 22.669 |
| 速度标准差/(m·s-1) | 10.127 | 5.040 | 4.691 |
| 平均加速度/(m·s-2) | 0.254 | 0.251 | 0.317 |
| 平均减速度/(m·s-2) | -0.308 | -0.255 | -0.369 |
| 最大加速度/(m·s-2) | 5.147 | 3.306 | 6.173 |
| 最小减速度/(m·s-2) | -8.561 | -9.918 | -5.970 |
| 加速度标准差/(m·s-2) | 0.578 | 0.463 | 0.589 |
| 平均转向角速度/(rad·s-1) | 0.0695 | 0.074 | 0.094 |
| 最大转向角速度/(rad·s-1) | 2.091 | 1.715 | 1.188 |
| 转向角速度标准差/(rad·s-1) | 0.199 | 0.181 | 0.185 |
| 平均转向角加速度/(rad·s-2) | 0.0634 | 0.074 | 0.086 |
| 平均回正角加速度/(rad·s-2) | 0.065 | 0.074 | 0.089 |
| 最大角加速度/(rad·s-2) | 1.623 | 3.332 | 3.517 |
| 角加速度标准差/(rad·s-2) | 0.154 | 0.148 | 0.169 |
| 平均侧向加速度/(m·s-2) | 0.267 | 0.190 | 0.233 |
| 侧向加速度标准差/(m·s-2) | 0.537 | 0.403 | 0.483 |
| 平均地面行驶阻力系数 | 0.012 | 0.047 | 0.096 |
| 最大地面行驶阻力系数 | 0.149 | 0.157 | 0.401 |
| 最小地面行驶阻力系数 | -0.173 | -0.188 | -0.390 |
| 阻力系数标准差 | 0.0364 | 0.033 | 0.066 |
| 平均阻力系数变化率/s-1 | 0.011 | 0.012 | 0.019 |
| 最大阻力系数变化率/s-1 | 0.222 | 0.385 | 0.669 |
| 阻力系数变化率标准差/s-1 | 0.018 | 0.021 | 0.033 |
| 加速比例 | 54.6 | 50.4 | 53.1 |
| 转向比例 | 16.7 | 19.9 | 24.5 |
| 上坡比例 | 60.8 | 51.5 | 39.2 |
| 特征覆盖率/% | 93.70 | 94.00 | 95.75 |
表5 构建工况3种路面特征值
Table 5 Feature values of the constructed driving cycle for three typical road conditions
| 特征值 | 铺面路 | 砂石路 | 起伏土路 |
|---|---|---|---|
| 平均速度/(m·s-1) | 14.686 | 9.767 | 8.050 |
| 最大速度/(m·s-1) | 29.717 | 28.465 | 22.669 |
| 速度标准差/(m·s-1) | 10.127 | 5.040 | 4.691 |
| 平均加速度/(m·s-2) | 0.254 | 0.251 | 0.317 |
| 平均减速度/(m·s-2) | -0.308 | -0.255 | -0.369 |
| 最大加速度/(m·s-2) | 5.147 | 3.306 | 6.173 |
| 最小减速度/(m·s-2) | -8.561 | -9.918 | -5.970 |
| 加速度标准差/(m·s-2) | 0.578 | 0.463 | 0.589 |
| 平均转向角速度/(rad·s-1) | 0.0695 | 0.074 | 0.094 |
| 最大转向角速度/(rad·s-1) | 2.091 | 1.715 | 1.188 |
| 转向角速度标准差/(rad·s-1) | 0.199 | 0.181 | 0.185 |
| 平均转向角加速度/(rad·s-2) | 0.0634 | 0.074 | 0.086 |
| 平均回正角加速度/(rad·s-2) | 0.065 | 0.074 | 0.089 |
| 最大角加速度/(rad·s-2) | 1.623 | 3.332 | 3.517 |
| 角加速度标准差/(rad·s-2) | 0.154 | 0.148 | 0.169 |
| 平均侧向加速度/(m·s-2) | 0.267 | 0.190 | 0.233 |
| 侧向加速度标准差/(m·s-2) | 0.537 | 0.403 | 0.483 |
| 平均地面行驶阻力系数 | 0.012 | 0.047 | 0.096 |
| 最大地面行驶阻力系数 | 0.149 | 0.157 | 0.401 |
| 最小地面行驶阻力系数 | -0.173 | -0.188 | -0.390 |
| 阻力系数标准差 | 0.0364 | 0.033 | 0.066 |
| 平均阻力系数变化率/s-1 | 0.011 | 0.012 | 0.019 |
| 最大阻力系数变化率/s-1 | 0.222 | 0.385 | 0.669 |
| 阻力系数变化率标准差/s-1 | 0.018 | 0.021 | 0.033 |
| 加速比例 | 54.6 | 50.4 | 53.1 |
| 转向比例 | 16.7 | 19.9 | 24.5 |
| 上坡比例 | 60.8 | 51.5 | 39.2 |
| 特征覆盖率/% | 93.70 | 94.00 | 95.75 |
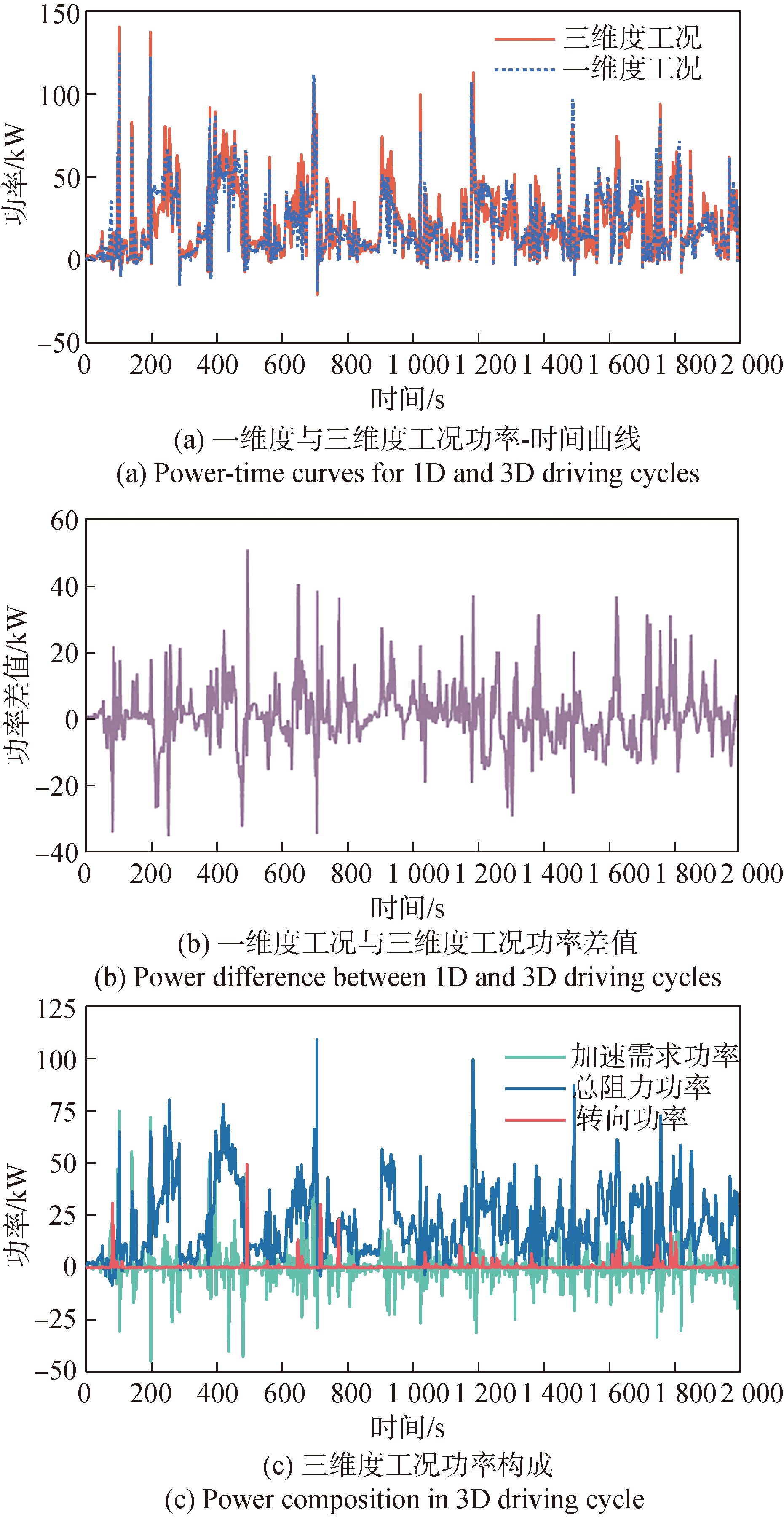
图8 构建工况需求功率-时间关系
Fig.8 Power-time curve for driving cycle
| 工况和误 差降低 | 平均功率/ kW | 最大功率/ kW | 最小功率/ kW | 功率均方差/ kW | 总耗能/ kJ |
|---|---|---|---|---|---|
| 一维度 | 21.01 | 124.71 | -18.83 | 18.65 | 41886 |
| 三维度 | 21.86 | 140.20 | -20.79 | 19.36 | 43584 |
| 原始数据 | 21.57 | 157.19 | -21.09 | 19.06 | |
| 误差降 低/% | 1.25 | 9.85 | 9.29 | 0.57 |
表6 一维度与三维度工况功率特征值
Table 6 Power characteristics of single-dimension and three-dimension driving cycles
| 工况和误 差降低 | 平均功率/ kW | 最大功率/ kW | 最小功率/ kW | 功率均方差/ kW | 总耗能/ kJ |
|---|---|---|---|---|---|
| 一维度 | 21.01 | 124.71 | -18.83 | 18.65 | 41886 |
| 三维度 | 21.86 | 140.20 | -20.79 | 19.36 | 43584 |
| 原始数据 | 21.57 | 157.19 | -21.09 | 19.06 | |
| 误差降 低/% | 1.25 | 9.85 | 9.29 | 0.57 |

图9 一维度与三维度工况EMS运行表现
Fig.9 EMS performance under 1D and 3D driving cycles
| 工况和增 加比例 | 电池最大 输出功率/ kW | 电池最大 充电功率/ kW | 电池平均 功率/ kW | 发动机最 大功率/ kW | 发动机 总耗能/ kJ |
|---|---|---|---|---|---|
| 一维度 | 124.71 | 38.83 | 1.45 | 84.46 | 117004 |
| 三维度 | 140.20 | 40.79 | 1.50 | 126.43 | 121850 |
| 增加比例/% | 12.42 | 49.70 | 2.84 | 5.03 | 4.14 |
表7 一维度与三维度工况EMS运行特征值
Table 7 EMS performance characteristics for 1D and 3D driving cycles
| 工况和增 加比例 | 电池最大 输出功率/ kW | 电池最大 充电功率/ kW | 电池平均 功率/ kW | 发动机最 大功率/ kW | 发动机 总耗能/ kJ |
|---|---|---|---|---|---|
| 一维度 | 124.71 | 38.83 | 1.45 | 84.46 | 117004 |
| 三维度 | 140.20 | 40.79 | 1.50 | 126.43 | 121850 |
| 增加比例/% | 12.42 | 49.70 | 2.84 | 5.03 | 4.14 |
| [1] |
王绪, 李睿, 黄英, 等. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3):907-915.
doi: 10.12382/bgxb.2022.0828 |
|
doi: 10.12382/bgxb.2022.0828 |
|
| [2] |
谭颖琦, 许景懿, 熊光明, 等. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11):2738-2748.
|
|
|
|
| [3] |
孙乐乐, 黄松, 郑长友, 等. 自动驾驶仿真测试场景生成技术研究进展[J]. 计算机工程与应用, 2025, 61(1):59-79.
doi: 10.3778/j.issn.1002-8331.2405-0117 |
|
doi: 10.3778/j.issn.1002-8331.2405-0117 |
|
| [4] |
徐向阳, 胡文浩, 董红磊, 等. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4):610-619.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
郑天雷, 王兆, 保翔, 等. 基于新行驶工况的汽车节能标准体系研究[J]. 中国汽车, 2020(9):44-48.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
邵攀登, 任田园, 李忠玉, 等. 基于短行程V-A矩阵法的西安市某公交线路工况构建[C]// 第19届亚太汽车工程年会暨2017中国汽车工程学会年会论文集. 上海: 中国汽车工程学会, 2017:1394-1397.
|
|
|
|
| [11] |
|
| [12] |
孙文, 荣浚材, 王军年, 等. 带弯道信息的城市复合行驶工况构建方法研究[J]. 汽车工程, 2021, 43(10):1519-1527.
doi: 10.19562/j.chinasae.qcgc.2021.10.014 |
|
|
|
| [13] |
田元武, 杨志文, 王计广, 等. 基于K均值聚类的天津市环卫车行驶工况研究[J]. 河北工业大学学报, 2023, 52(6):90-96.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
陆宏泽, 张付军, 赵长禄, 等. 履带车辆行驶循环的构建方法研究[J]. 兵工学报, 2011, 32(9):1041-1046.
|
|
|
|
| [23] |
陈建宇, 张恒靖. 基于实例的履带车辆行驶工况构建方法对比研究[J]. 现代机械, 2020(2):16-21.
|
|
|
|
| [24] |
|
| [25] |
韩雪峰. 基于强化学习的混合动力履带车辆能量管理研究[D]. 北京: 北京理工大学, 2020.
|
|
|
|
| [26] |
黄祖永. 地面车辆原理(原书第4版)[M].贾振中,李升波,胡晓松,译. 北京: 机械工业出版社, 2018.
|
|
|
| [1] | 王露, 晏江, 尹鹏, 刘彦, 黄风雷. 融合毁伤特征的火力资源优化分配算法[J]. 兵工学报, 2025, 46(8): 240971-. |
| [2] | 栾永超, 张斌, 李宸凯, 褚文博, 赵冬娥. 强烟雾干扰下的枪口子弹初速测量方法[J]. 兵工学报, 2025, 46(3): 240160-. |
| [3] | 邢文松, 龙震海, 黄杰. 基于滞回环数据的42CrMo高强度钢低周扭转疲劳性能分析[J]. 兵工学报, 2025, 46(1): 231163-. |
| [4] | 冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[J]. 兵工学报, 2025, 46(1): 231124-. |
| [5] | 乔新博, 赵永强, 张景程. 基于空间偏振混叠特性的红外偏振视频目标跟踪[J]. 兵工学报, 2024, 45(9): 3274-3287. |
| [6] | 高华, 单春来, 刘军, 张凡凡, 刘朋科. 基于频次与极值外推综合的载荷外推总体方法[J]. 兵工学报, 2024, 45(6): 1942-1953. |
| [7] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [8] | 查冰婷, 徐光博, 秦建新, 张合. 多发多收周视激光引信时刻鉴别方法[J]. 兵工学报, 2024, 45(11): 4145-4154. |
| [9] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [10] | 章斌, 卢洪义, 刘舜, 桑豆豆, 杨禹成. 发动机部件CT图像特征提取与区域生长算法[J]. 兵工学报, 2023, 44(4): 1171-1180. |
| [11] | 王洋, 冯永新, 宋碧雪, 田秉禾. DP-DRCnet卷积神经网络信号调制识别算法[J]. 兵工学报, 2023, 44(2): 545-555. |
| [12] | 王亮, 陈建华, 李烨. 一种基于深度学习的无人艇海上目标识别技术[J]. 兵工学报, 2022, 43(S2): 13-19. |
| [13] | 李恒, 叶祖坤, 查文彬, 王禹林. 基于多传感器信息决策级融合的刀具磨损在线监测[J]. 兵工学报, 2021, 42(9): 2024-2031. |
| [14] | 王振峰, 李飞, 王新宇, 杨建森, 秦也辰. 基于交互式多模型无迹卡尔曼滤波的悬架系统状态估计[J]. 兵工学报, 2021, 42(2): 242-253. |
| [15] | 刘春光, 陈路明, 张运银, 张征, 徐浩轩. 基于改进灰色马尔可夫链的电传动装甲车辆负载需求功率预测[J]. 兵工学报, 2021, 42(10): 2130-2144. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4