
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (2): 240183-.doi: 10.12382/bgxb.2024.0183
谢景硕1, 韩立金1,2,*( ), 刘辉1,2, 任晓磊1, 侯泓钰1, 商庆一1
), 刘辉1,2, 任晓磊1, 侯泓钰1, 商庆一1
收稿日期:2024-03-13
上线日期:2025-02-28
通讯作者:
基金资助:
XIE Jingshuo1, HAN Lijin1,2,*(), LIU Hui1,2, REN Xiaolei1, HOU Hongyu1, SHANG Qingyi1
Received:2024-03-13
Online:2025-02-28
摘要:
针对串联式四轮腿机器人精确控制姿态的问题,提出一种以无偏差模型预测控制为核心的运动控制框架。所涉及的模型为考虑机身、腿部和车轮的质量分布而建立的合成质心动力学模型,并且基于自抗扰控制思想,将模型的未建模特性视为扰动,建立扩张状态观测器对其进行估计和补偿;为解决姿态调节过程中车轮易滚动导致腿部外展的问题引入关节闭环控制,同时设计额外的车轮控制策略以辅助约束腿部状态。在串联式轮腿机器人上进行了硬件试验,研究结果表明,新的运动控制框架能够准确跟踪期望姿态信号,有效抑制地形扰动和外力扰动,确保机器人的行驶平稳性和抗干扰能力。
中图分类号:
谢景硕, 韩立金, 刘辉, 任晓磊, 侯泓钰, 商庆一. 串联式轮腿机器人姿态控制方法[J]. 兵工学报, 2025, 46(2): 240183-.
XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot[J]. Acta Armamentarii, 2025, 46(2): 240183-.

图1 串联式四轮腿机器人
Fig.1 Serial wheel-legged robot
| 参数 | 数值 |
|---|---|
| 整体质量m/kg | 65 |
| 大腿质量mh/kg | 3 |
| 小腿质量mk/kg | 2.5 |
| 车轮质量mw/kg | 2.5 |
| 大腿长度lh/m | 0.3 |
| 小腿长度lk/m | 0.3 |
表1 系统主要参数
Table 1 Main parameters of the system
| 参数 | 数值 |
|---|---|
| 整体质量m/kg | 65 |
| 大腿质量mh/kg | 3 |
| 小腿质量mk/kg | 2.5 |
| 车轮质量mw/kg | 2.5 |
| 大腿长度lh/m | 0.3 |
| 小腿长度lk/m | 0.3 |
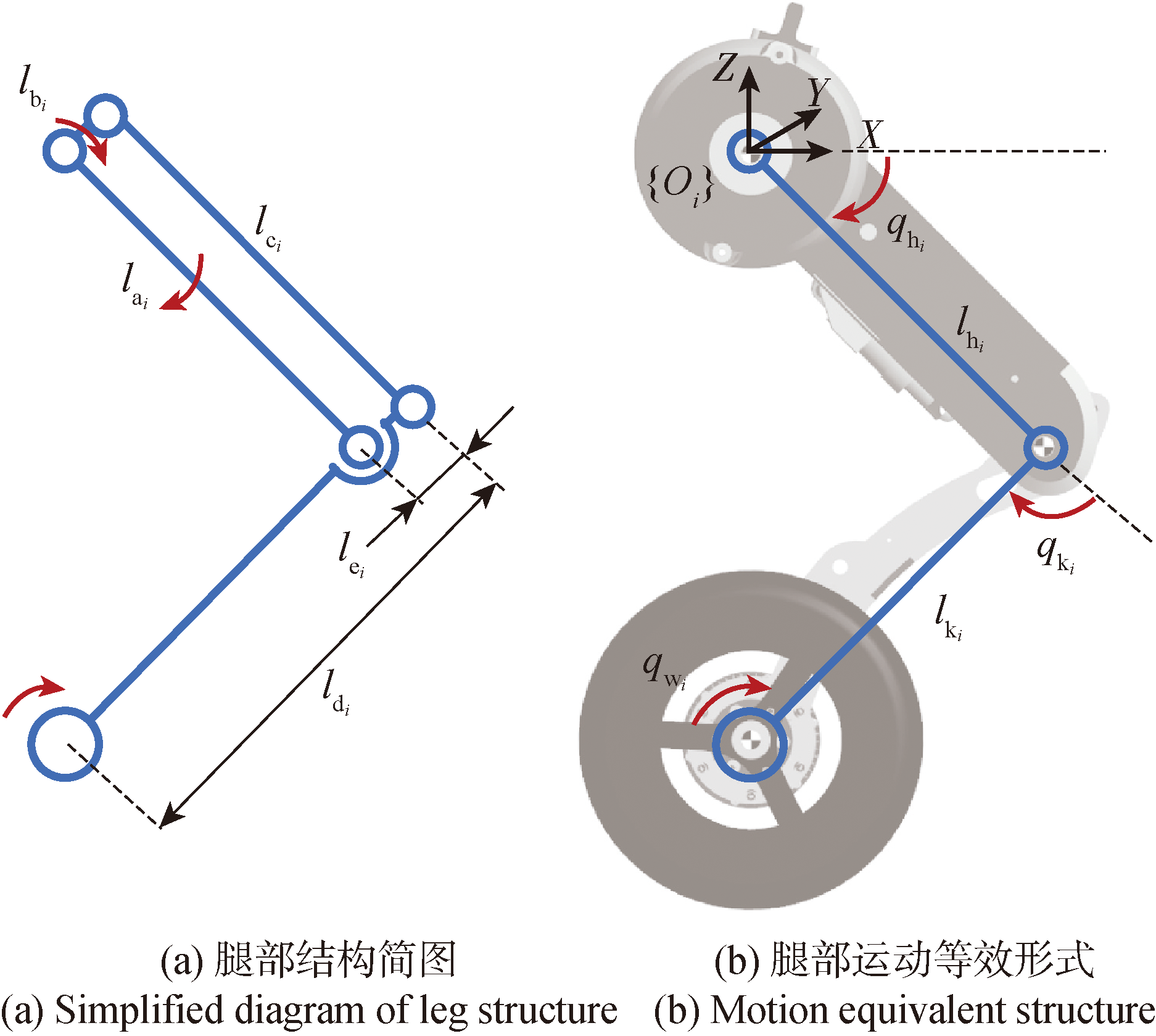
图2 腿部运动学分析示意图
Fig.2 Schematic diagram of leg kinematics analysis

图3 轮腿机器人坐标系定义
Fig.3 Coordinate system of wheel-legged robot

图4 运动控制框图
Fig.4 Motion control framework
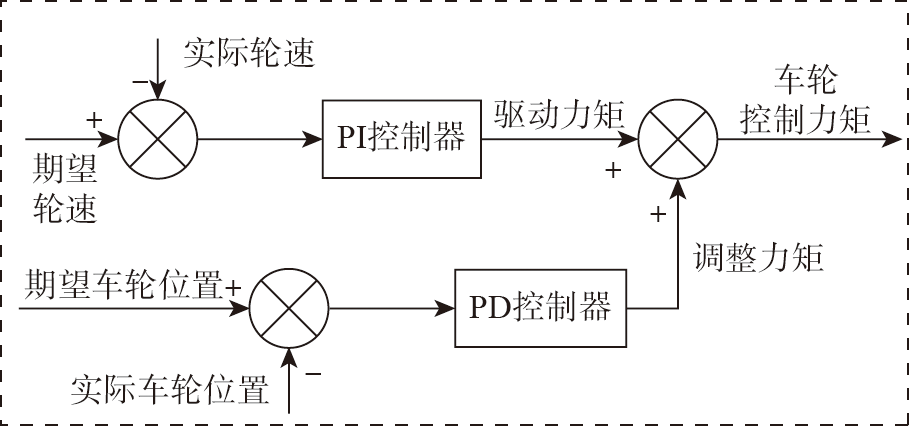
图5 车轮控制策略
Fig.5 Wheel control strategy

图6 调整力矩作用示意图
Fig.6 Schematic diagram of assist torque effect

图7 坡度估计仿真场景
Fig.7 The slope estimation simulation scenes

图8 坡度估计仿真结果
Fig.8 The slope estimation simulation results
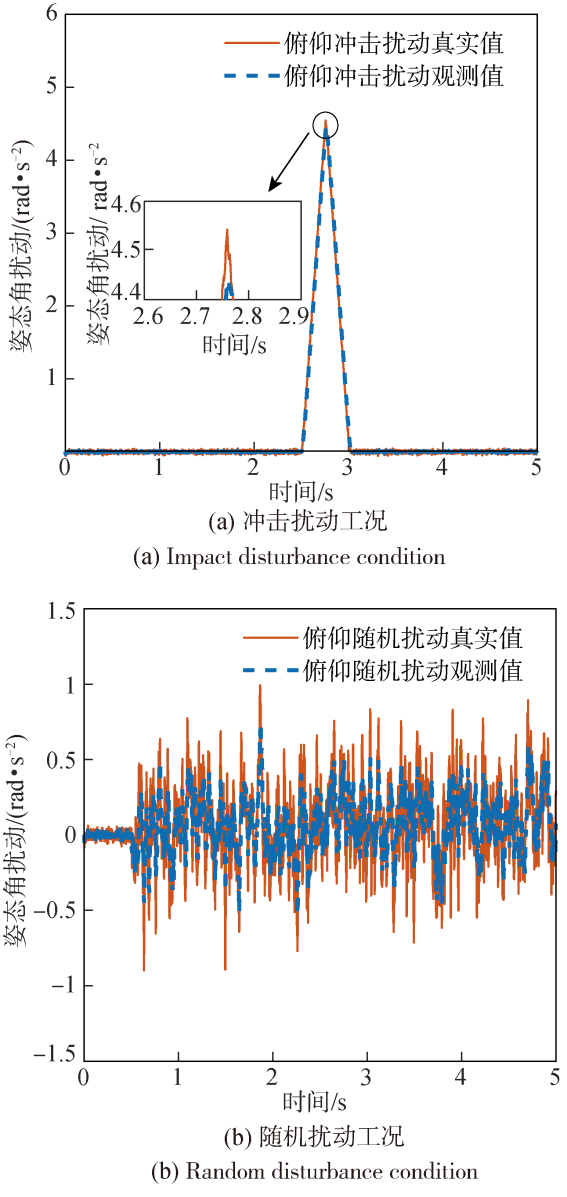
图9 俯仰扰动观测仿真结果
Fig.9 Simulated results of pitch disturbance observer

图10 侧倾扰动观测仿真结果
Fig.10 Simulated results of roll disturbance observer

图11 对比仿真场景
Fig.11 The comparative simulation conditions
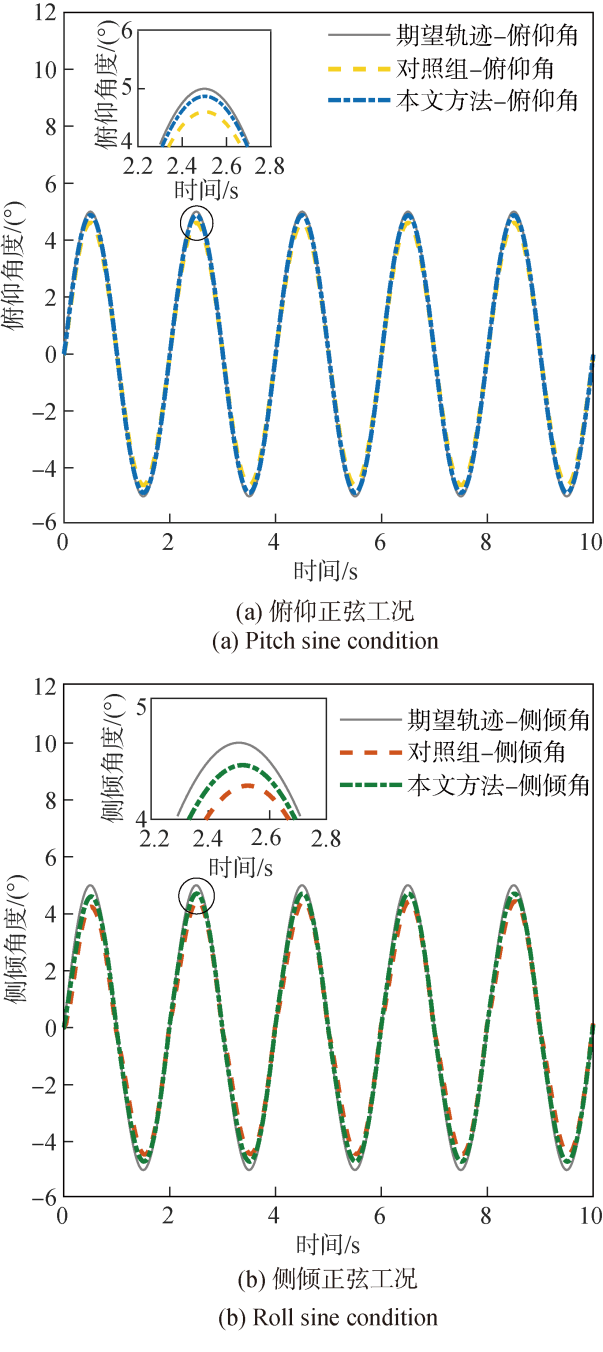
图12 正弦信号激励仿真工况姿态角度
Fig.12 Attitude angles in sine signal simulation
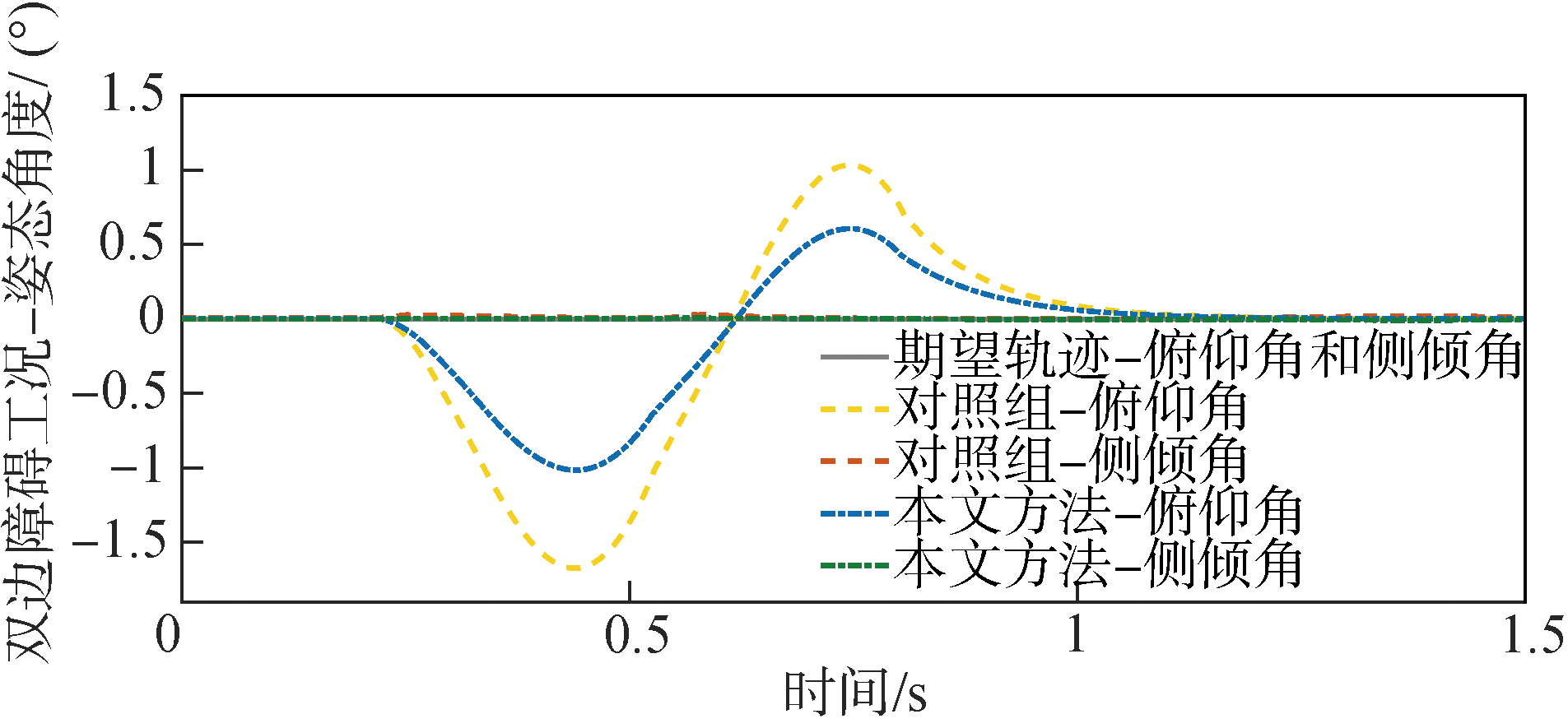
图13 双边障碍仿真工况姿态角度
Fig.13 Attitude angles in bilateral handicap simulation
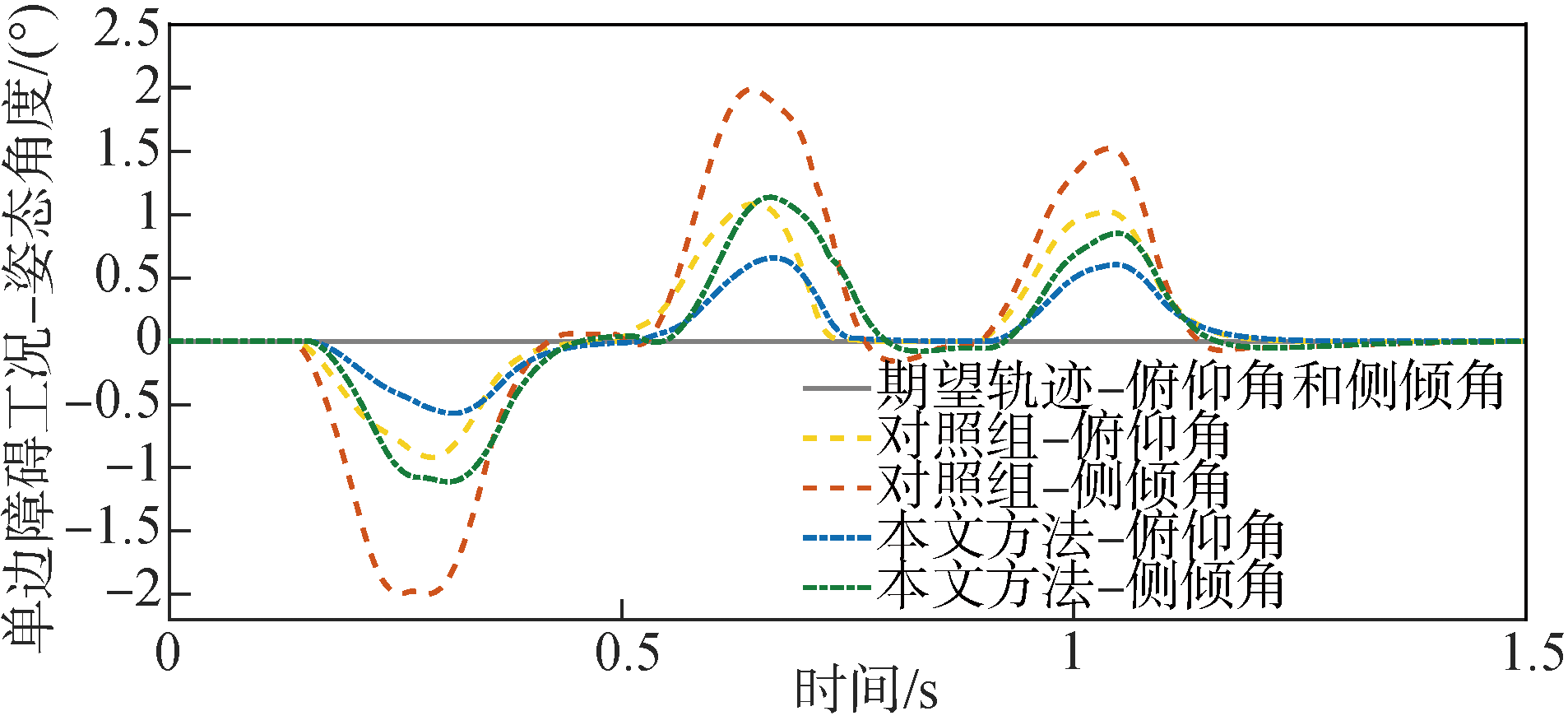
图14 单边障碍仿真工况姿态角度
Fig.14 Attitude angles in unilateral obstacle simulation
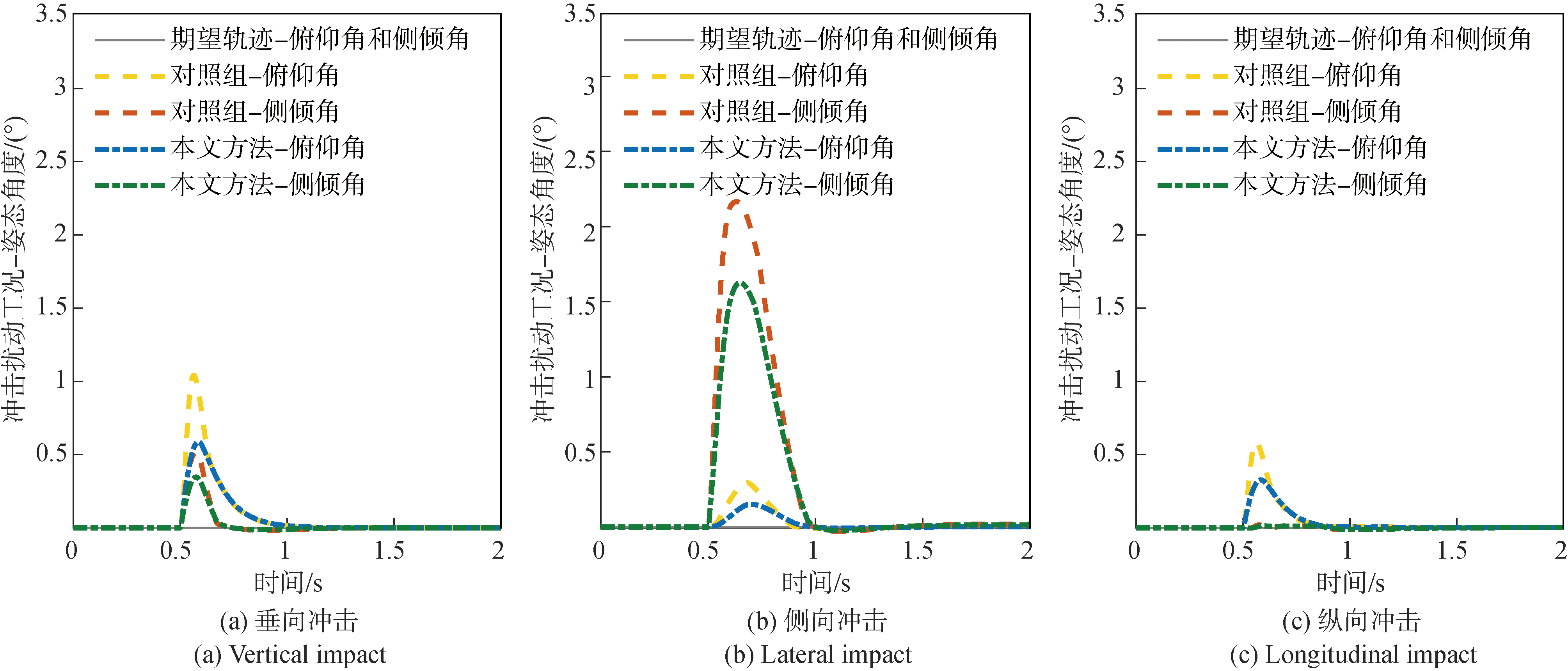
图15 冲击扰动仿真工况姿态角度
Fig.15 Attitude angles in impact disturbance simulation
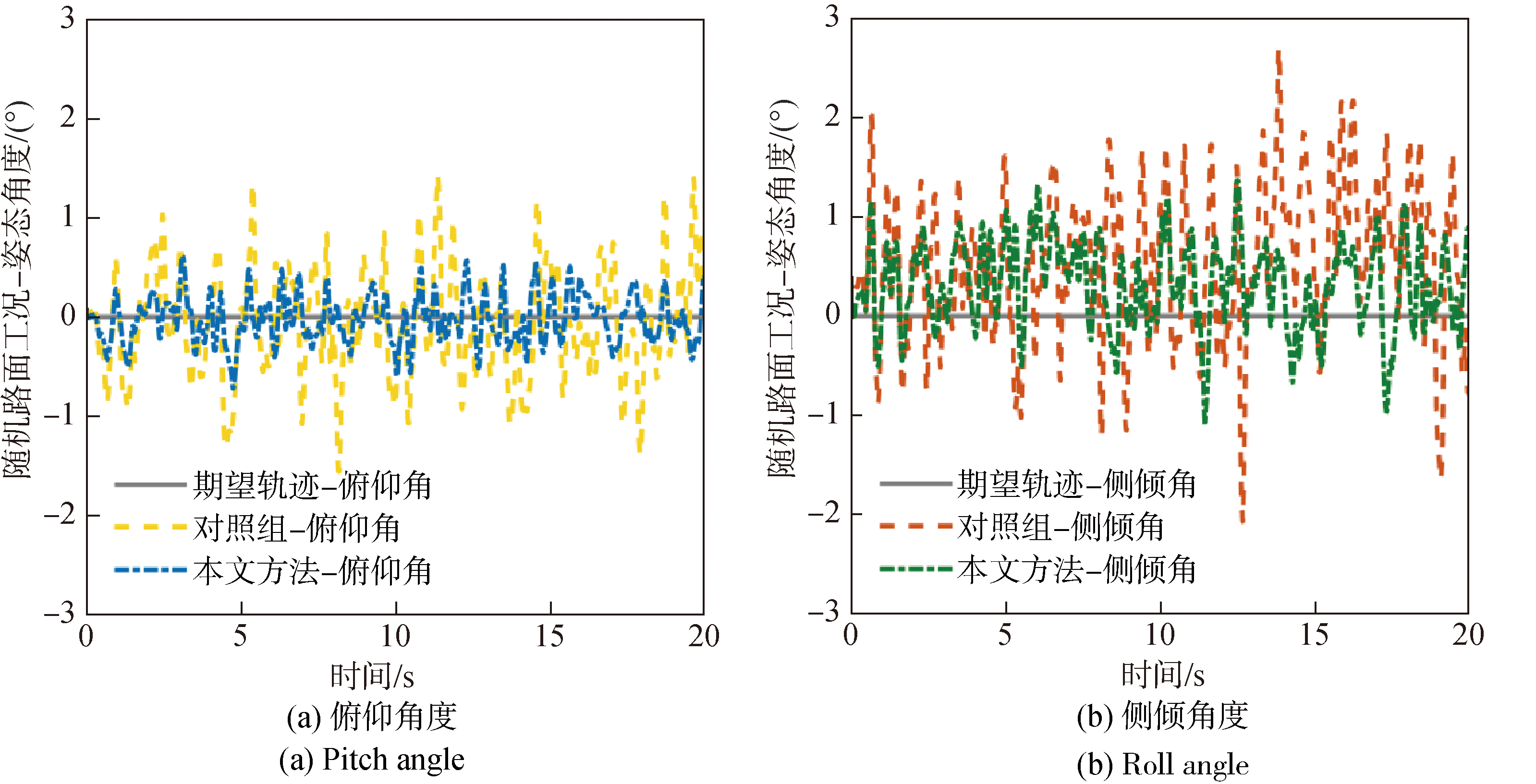
图16 随机路面仿真工况姿态角度
Fig.16 Attitude angles in random road surface simulation

图17 姿态角度均方根误差对比
Fig.17 Comparison of attitude angles RMSEs
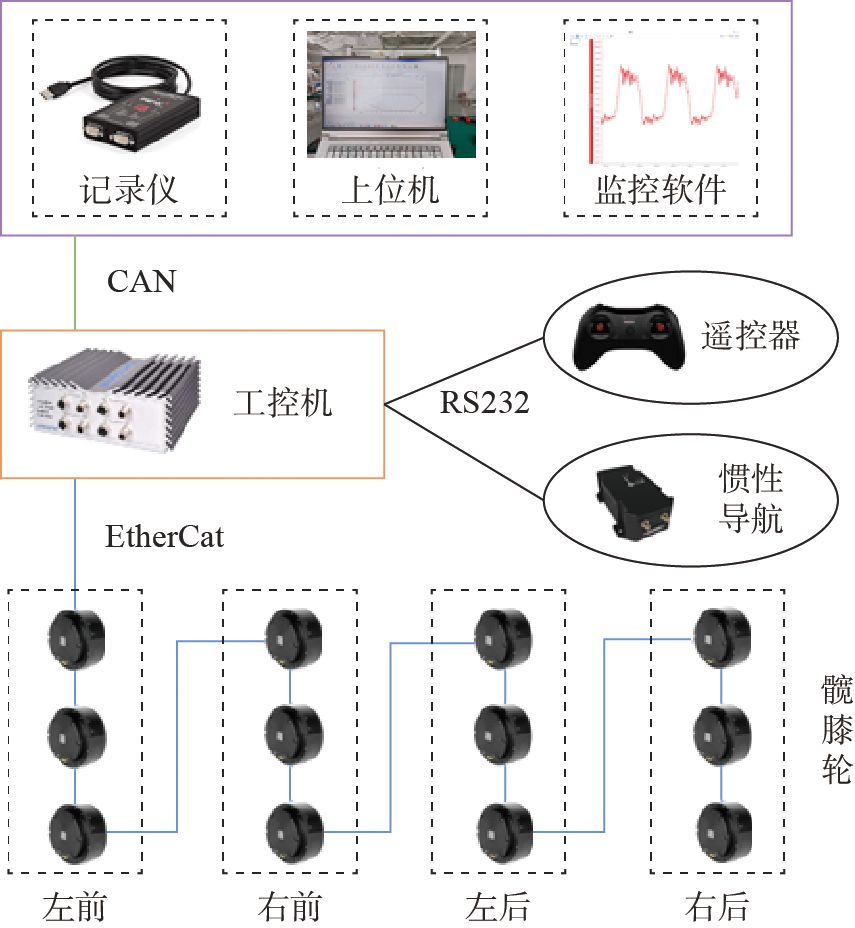
图18 轮腿机器人控制系统通信架构
Fig.18 Communication architecture of wheel-legged robot control system

图19 姿态调节工况俯仰角度
Fig.19 Pitch angle in attitude adjustment experiment
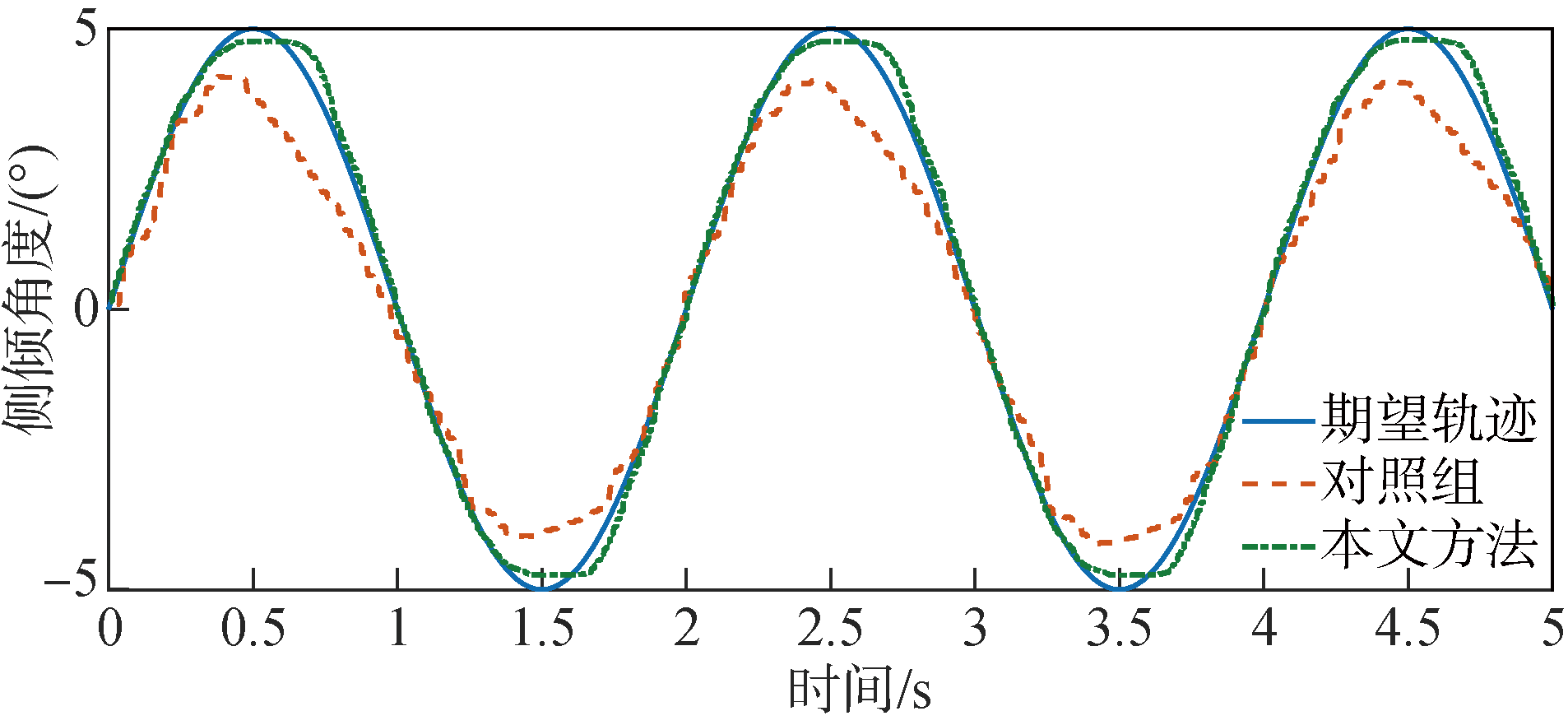
图20 姿态调节工况侧倾角度
Fig.20 Roll angle in attitude adjustment experiment

图21 障碍通过试验过程图
Fig.21 The process of passing through the obstacles
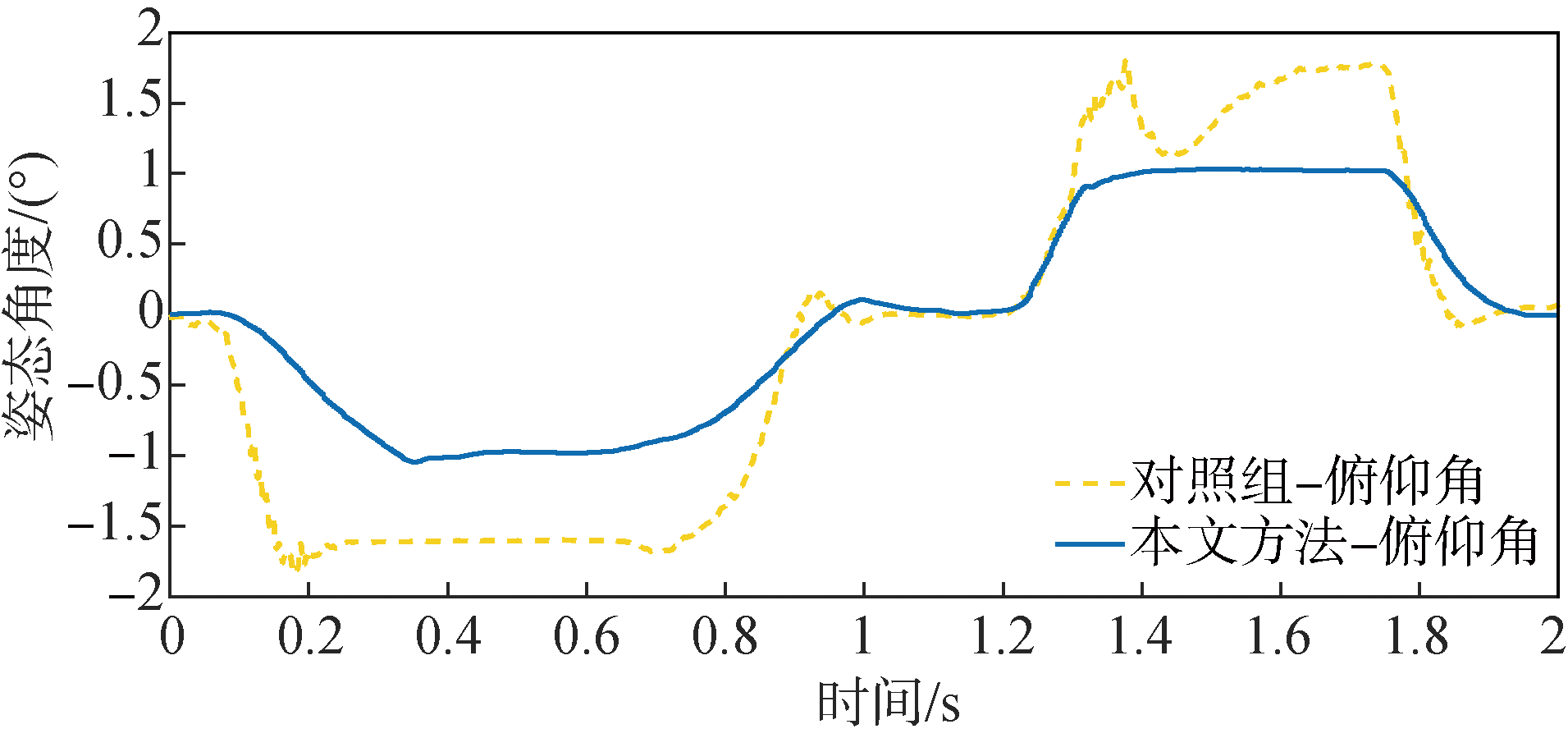
图22 双边障碍工况姿态角度
Fig.22 Attitude angles in bilateral handicap experiment

图23 单边障碍工况姿态角度
Fig.23 Attitude angles in unilateral obstacle experiment

图24 抗外部垂向扰动试验
Fig.24 Experiment for resistance to external vertical disturbance
图25 外部垂向扰动工况姿态角度
Fig.25 Attitude angles in vertical disturbance experiment
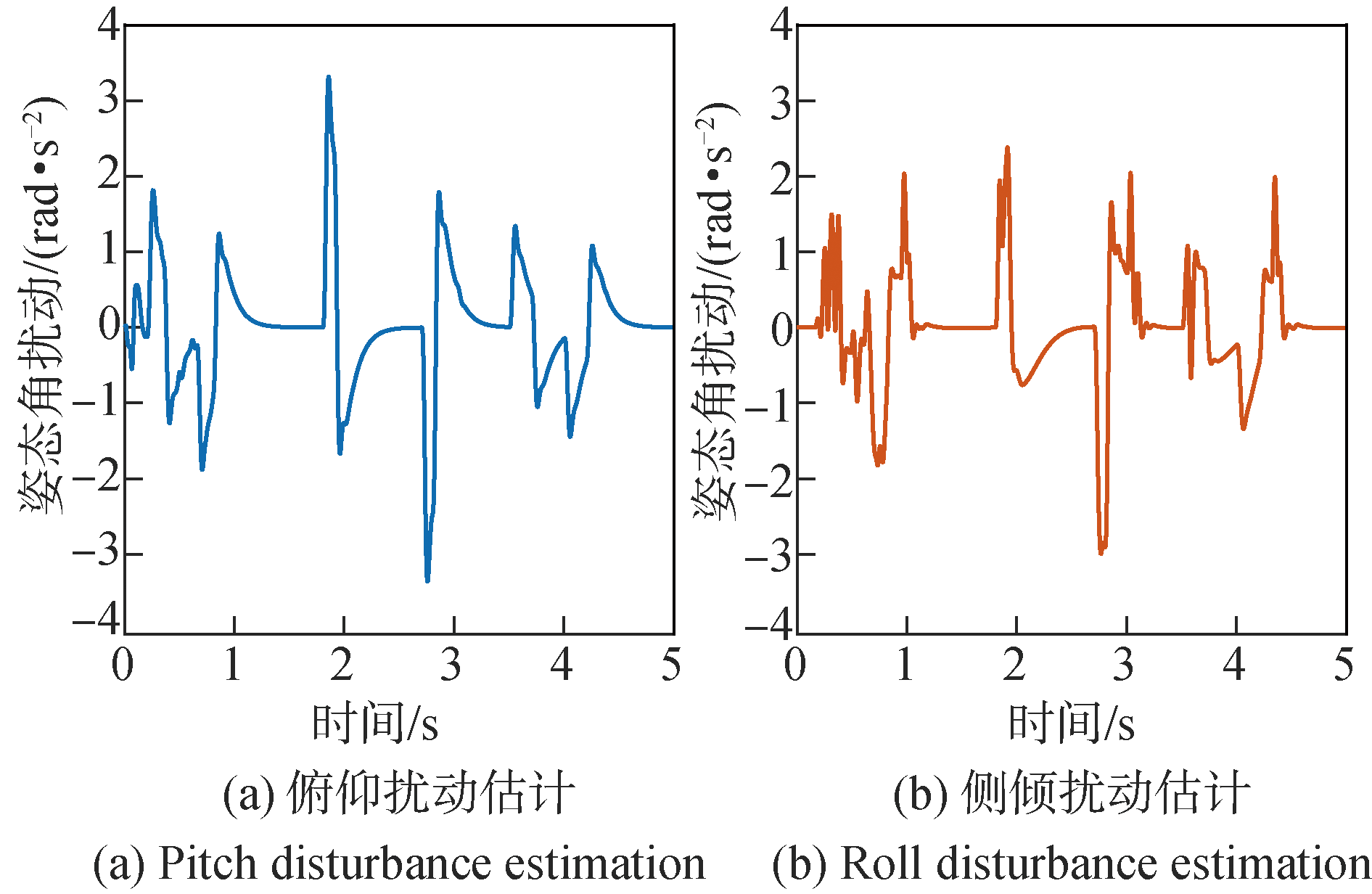
图26 外部垂向扰动工况扰动估计
Fig.26 Disturbance estimation in vertical disturbance experiment

图27 抗外部横向扰动试验
Fig.27 Experiment for resistance to external lateral disturbance
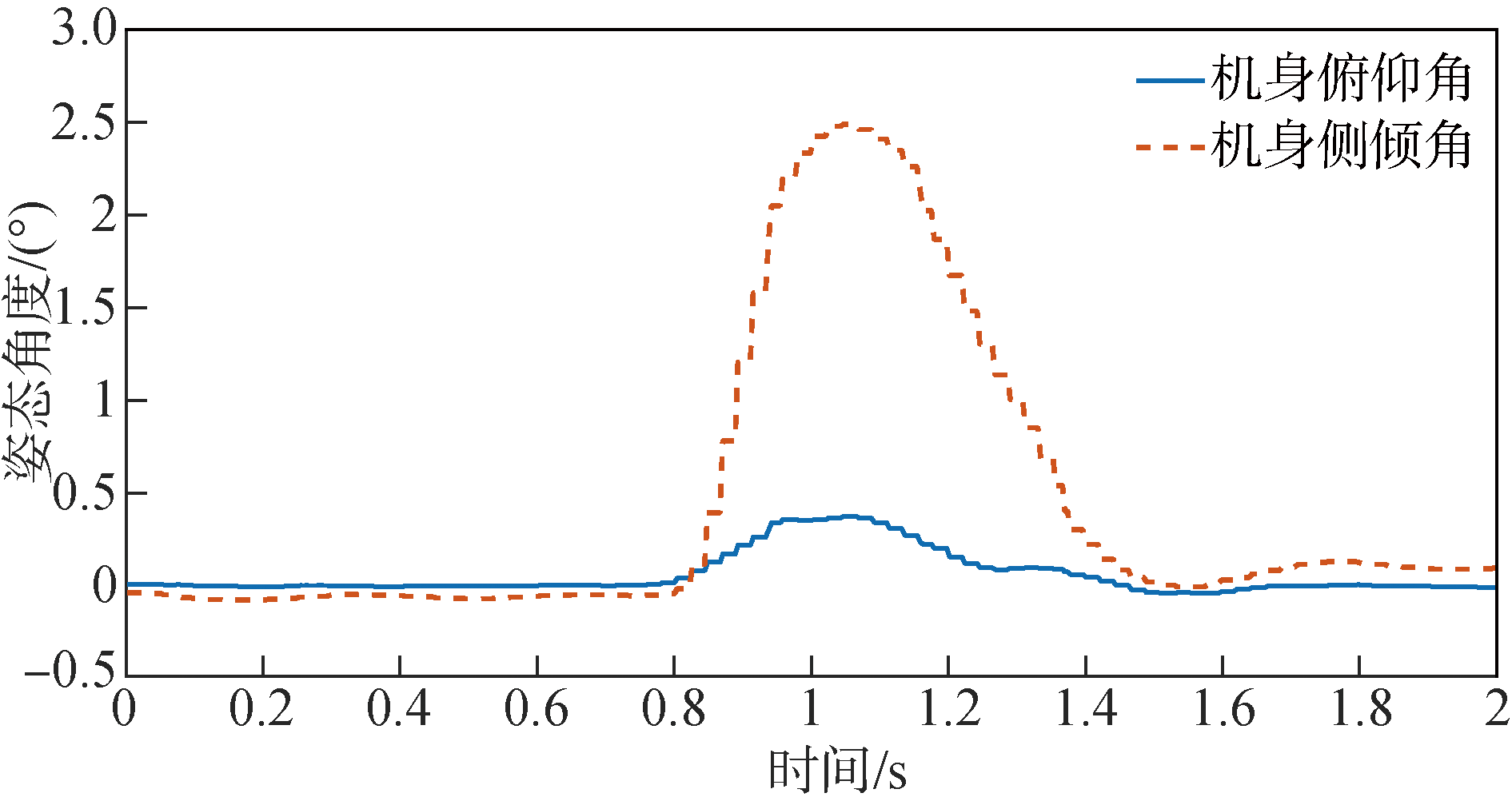
图28 外部横向扰动工况姿态角度
Fig.28 Attitude angles in lateral disturbance experiment
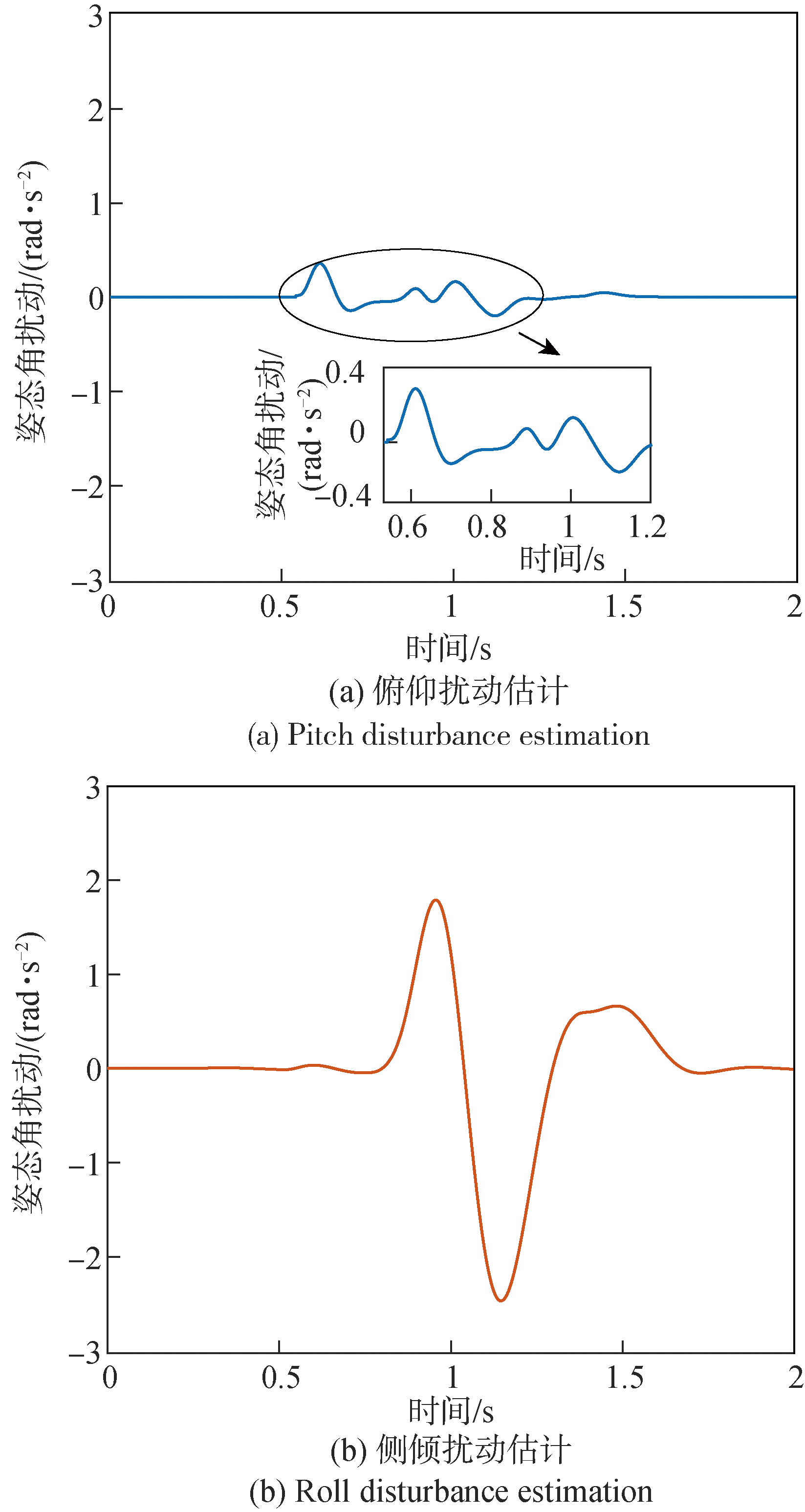
图29 外部横向扰动工况扰动估计
Fig.29 Disturbance estimation in lateral disturbance experiment

图30 抗外部纵向扰动试验
Fig.30 Experiment for resistance to external longitudinal disturbance
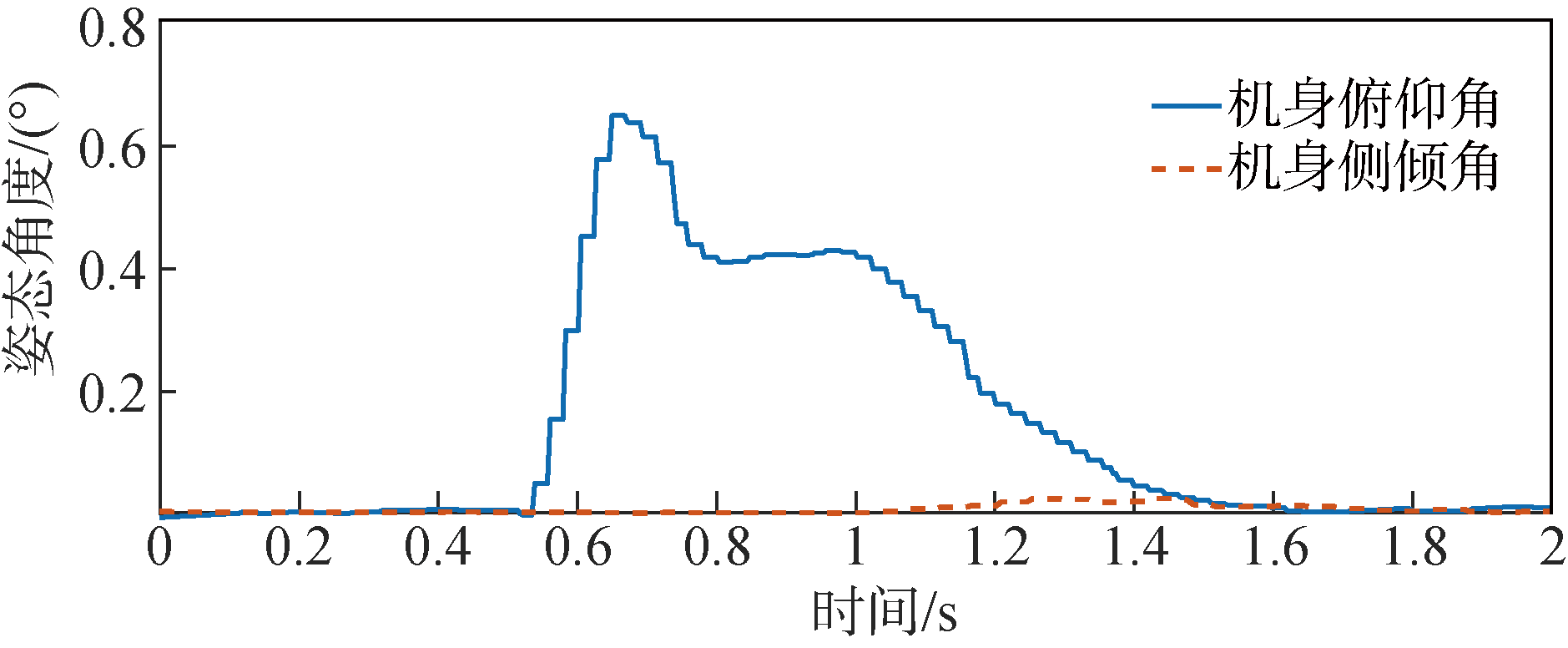
图31 外部纵向扰动工况姿态角度
Fig.31 Attitude angles in longitudinal disturbance experiment
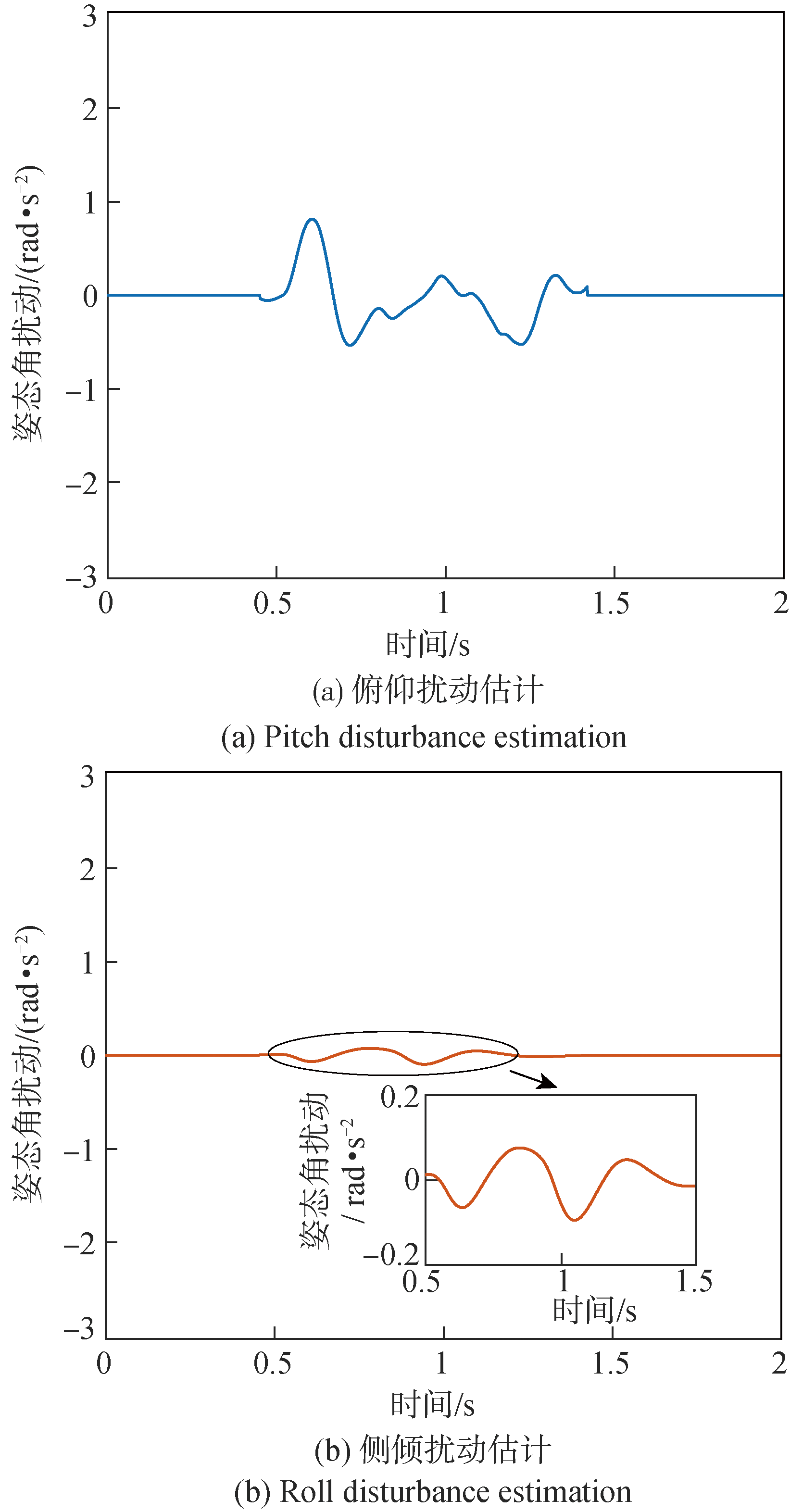
图32 外部纵向扰动工况扰动估计
Fig.32 Disturbance estimation in longitudinal disturbance experiment
| [1] |
|
| [2] |
姜祎, 王挺, 邵沛瑶, 等. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1):247-259.
doi: 10.12382/bgxb.2022.0823 |
|
doi: 10.12382/bgxb.2022.0823 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1016/j.isatra.2020.08.033 pmid: 32950232 |
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
雷涛, 徐康, 汪首坤, 等. 并联六轮腿机器人机身平稳性控制方法研究[J]. 机械工程学报, 2021, 57(21):34-44.
doi: 10.3901/JME.2021.21.034 |
|
doi: 10.3901/JME.2021.21.034 |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [1] | 赵新运, 于剑桥. 新型迅捷弹箭动力学建模与姿态控制[J]. 兵工学报, 2024, 45(7): 2182-2196. |
| [2] | 裴新月, 于勇, 李政, 李佳讯, 于剑桥. 基于神经网络优化直/气复合控制导弹迅捷转弯[J]. 兵工学报, 2024, 45(10): 3564-3576. |
| [3] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [4] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [5] | 刘辉, 刘宝帅, 廖登廷, 韩立金, 崔山. 基于前馈补偿的轮腿式机动平台姿态自适应控制[J]. 兵工学报, 2023, 44(9): 2756-2767. |
| [6] | 王治霖, 王江, 祁琪, 范世鹏. 基于LESO的新型自适应鲁棒滚转通道控制算法[J]. 兵工学报, 2023, 44(7): 1920-1929. |
| [7] | 高强, 侯远龙, 吕明明, 毛斌, 侯润民, 羊书毅, 吴斌. 某新型车载多管负载行进间稳定控制方法[J]. 兵工学报, 2023, 44(3): 736-747. |
| [8] | 高全喜, 可伟, 乔海岩. 基于线性自抗扰的水下运载器控制[J]. 兵工学报, 2023, 44(3): 783-791. |
| [9] | 赵春明, 焦胜海, 王晓飞, 姚跃民, 黄朝东. 柔性充气空间飞行器姿态控制系统设计[J]. 兵工学报, 2022, 43(6): 1346-1354. |
| [10] | 余跃, 王宏伦. 基于深度学习的高超声速飞行器再入预测校正容错制导[J]. 兵工学报, 2020, 41(4): 656-669. |
| [11] | 陈伟, 孙传杰, 李永泽, 拜云山. 基于离线预测控制的旋转尾翼稳定弹解耦控制器设计[J]. 兵工学报, 2018, 39(5): 901-909. |
| [12] | 赵贺伟, 杨秀霞, 沈如松, 胡云安. 弹性高超声速飞行器预设性能精细姿态控制[J]. 兵工学报, 2017, 38(3): 501-511. |
| [13] | 王俭臣, 齐晓慧. 基于气动参数辨识的飞控系统传感器故障估计[J]. 兵工学报, 2015, 36(1): 103-110. |
| [14] | 郑颖, 马大为, 姚建勇, 胡健. 火箭炮位置伺服系统自抗扰控制[J]. 兵工学报, 2014, 35(5): 597-603. |
| [15] | 齐晓慧, 李杰, 韩帅涛. 基于BP 神经网络的自适应自抗扰控制及仿真[J]. 兵工学报, 2013, 34(6): 776-782. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4