
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (7): 2182-2196.doi: 10.12382/bgxb.2023.0404
赵新运, 于剑桥*( )
)
收稿日期:2023-05-09
上线日期:2023-07-24
通讯作者:
ZHAO Xinyun, YU Jianqiao*()
Received:2023-05-09
Online:2023-07-24
摘要:
为大幅度提高弹箭的超大角度机动能力,提出一种新型迅捷弹箭动力学建模与姿态控制方法。通过在传统直接力/气动力复合控制敏捷弹箭尾部加装一类柔性可控圆伞,设计一种新型弹箭的几何构型,并划分新型迅捷转向的三个阶段。为回避牛顿欧拉力学在多体动力学建模过程中求解复杂约束力带来的一系列问题,以拉格朗日力学为基础,选取弹箭的位置、姿态和伞的姿态作为广义坐标,推导系统的动能,求解系统的广义力,建立以弹箭为主体的铅垂平面4自由度动力学模型。针对具有快时变性、强不确定性、强非线性等特点的柔性力/直接力/气动力复合控制律设计问题,建立系统姿态跟踪误差的状态方程,基于非奇异终端滑模面和双幂次趋近律设计具有有限时间收敛特性的姿态控制器,利用扩张状态观测器消除内外扰动对系统造成的负面影响,抑制抖振。通过仿真验证了新方法的合理性和有效性,并与传统敏捷弹箭进行仿真对比,验证了新方法有利于减小转弯半径、缩短转弯时间、减少能量消耗。
中图分类号:
赵新运, 于剑桥. 新型迅捷弹箭动力学建模与姿态控制[J]. 兵工学报, 2024, 45(7): 2182-2196.
ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile[J]. Acta Armamentarii, 2024, 45(7): 2182-2196.
图1 传统敏捷弹箭弹体配置
Fig.1 Configuration of traditional agile projectile
图2 传统敏捷弹箭掉头转弯
Fig.2 Heading reversal maneuver of traditional agile projectile
图3 新型迅捷弹箭弹体配置
Fig.3 Configuration of novel agile projectile
图4 新型迅捷弹箭掉头转弯
Fig.4 Heading reversal maneuver of novel agile projectile
图5 新型迅捷弹箭受力分析图
Fig.5 Force analysis diagram of novel agile projectile
图6 控制系统原理框图
Fig.6 Schematic diagram of control system
图7 弹箭飞行包络
Fig.7 Projectile flight envelope
| 传统、新型与 效果 | tsim/ s | EuR/ (N·s) | EuT/ (N·s) | Etotal/ (N·s) |
|---|---|---|---|---|
| 传统 | 2.31 | 3732.78 | 40567.50 | 44300.28 |
| 新型 | 2.00 | 13440.31 | 24952.50 | 38392.81 |
| 效果 | -13.27% | 260.06% | -38.49% | -13.34% |
表1 时间与能量消耗
Table 1 Time and energy consumption
| 传统、新型与 效果 | tsim/ s | EuR/ (N·s) | EuT/ (N·s) | Etotal/ (N·s) |
|---|---|---|---|---|
| 传统 | 2.31 | 3732.78 | 40567.50 | 44300.28 |
| 新型 | 2.00 | 13440.31 | 24952.50 | 38392.81 |
| 效果 | -13.27% | 260.06% | -38.49% | -13.34% |
图8 弹道曲线
Fig.8 Curves of trajectory
图9 俯仰角、攻角和弹道倾角变化曲线
Fig.9 Curves of pitch angle, attack of angle and flight path angle
图10 俯仰角速度变化曲线
Fig.10 Curves of pitch angular velocity
图11 法向加速度变化曲线
Fig.11 Curves of normal acceleration
图12 弹道倾角角速度变化曲线
Fig.12 Curves of flight path angular velocity
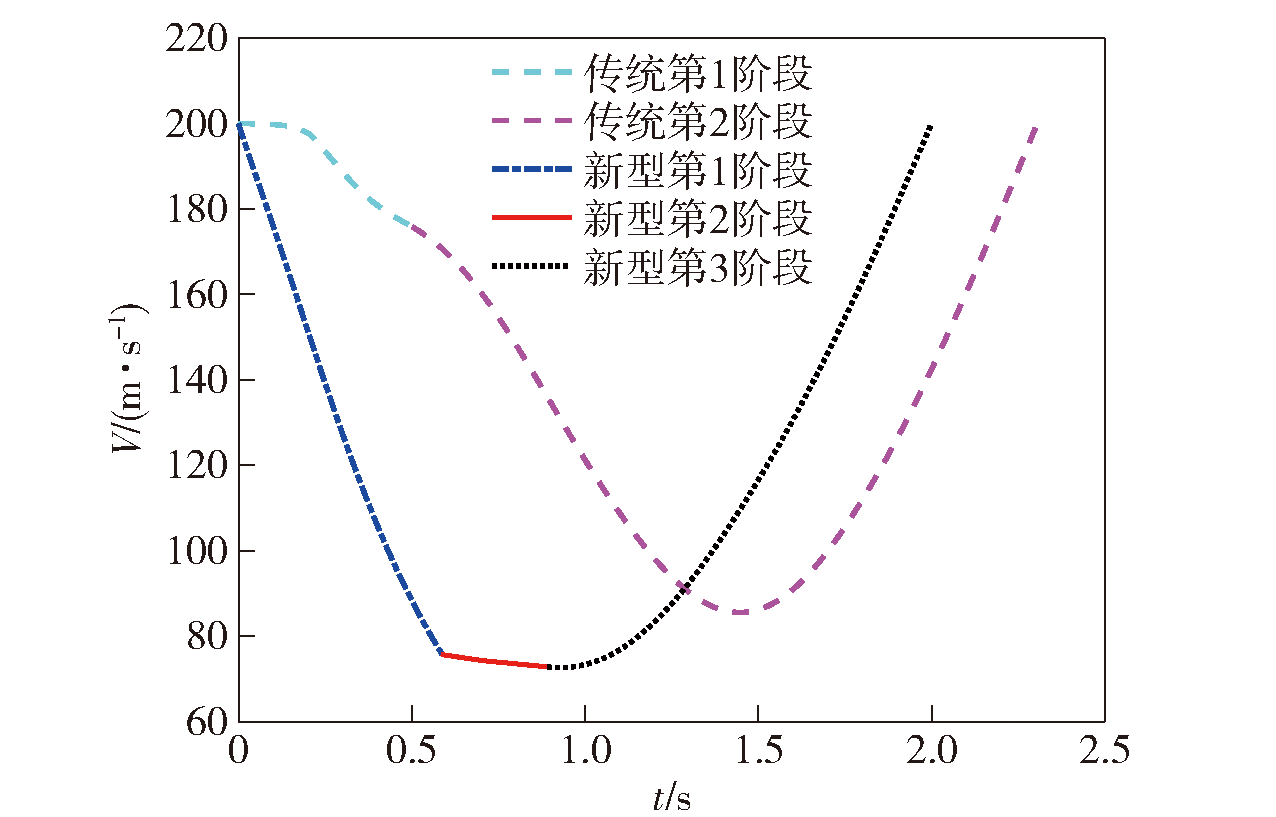
图13 速度曲线
Fig.13 Curves of velocity
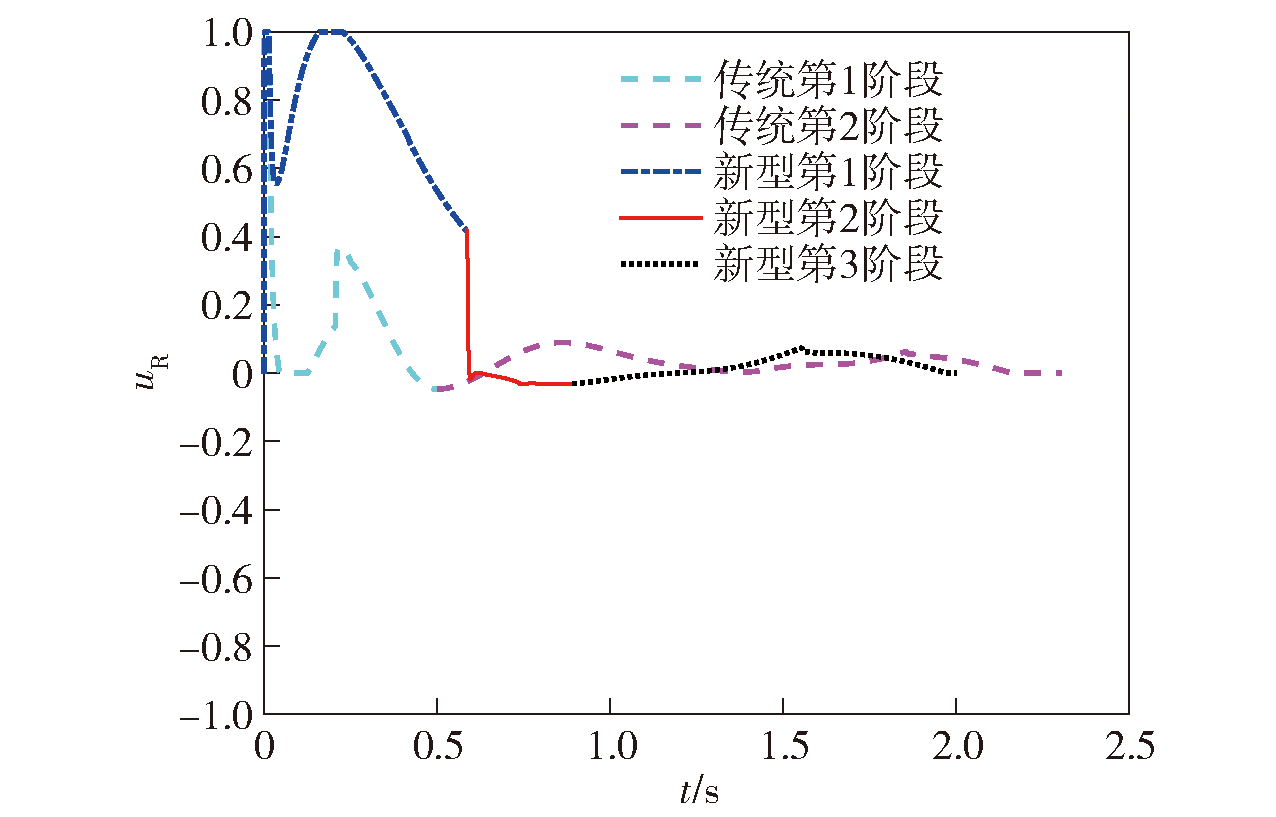
图14 直接力指令曲线
Fig.14 Curves of reaction-jet command
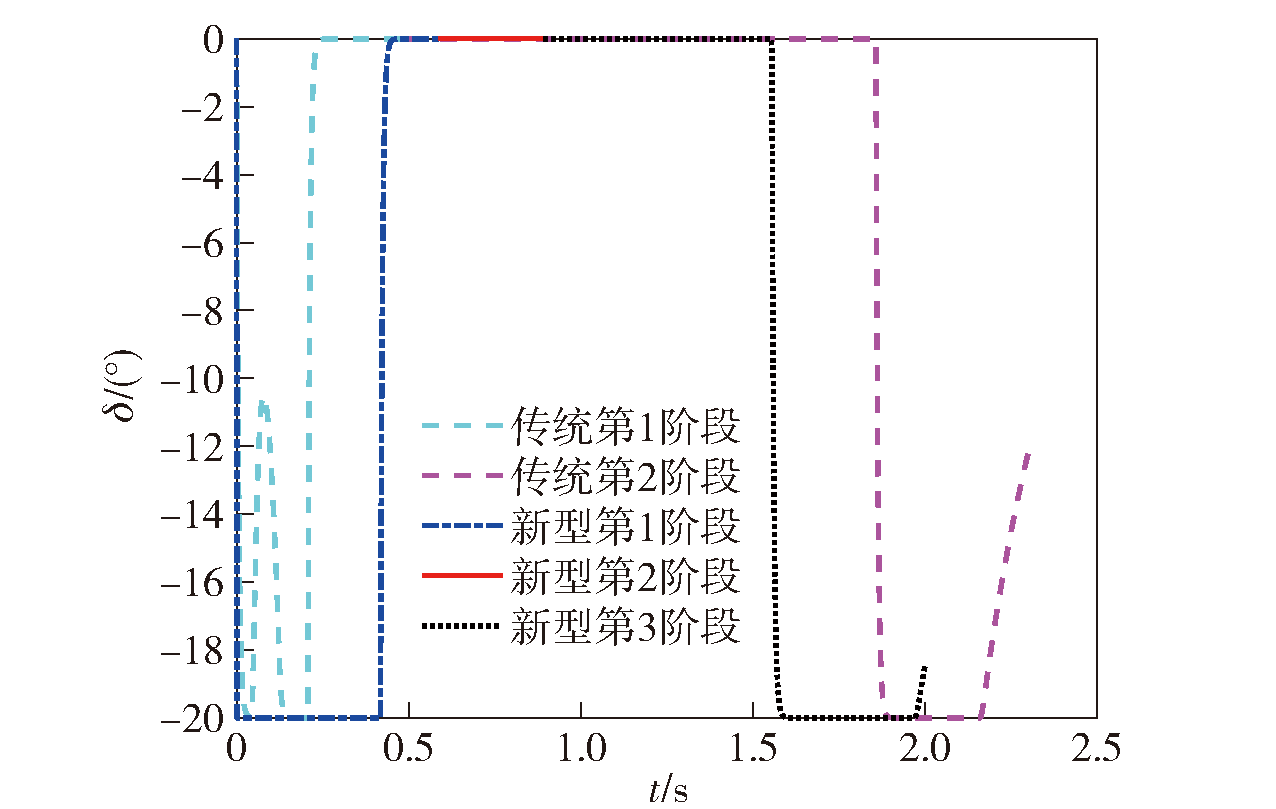
图15 气动舵指令曲线
Fig.15 Curves of elevator deflection command
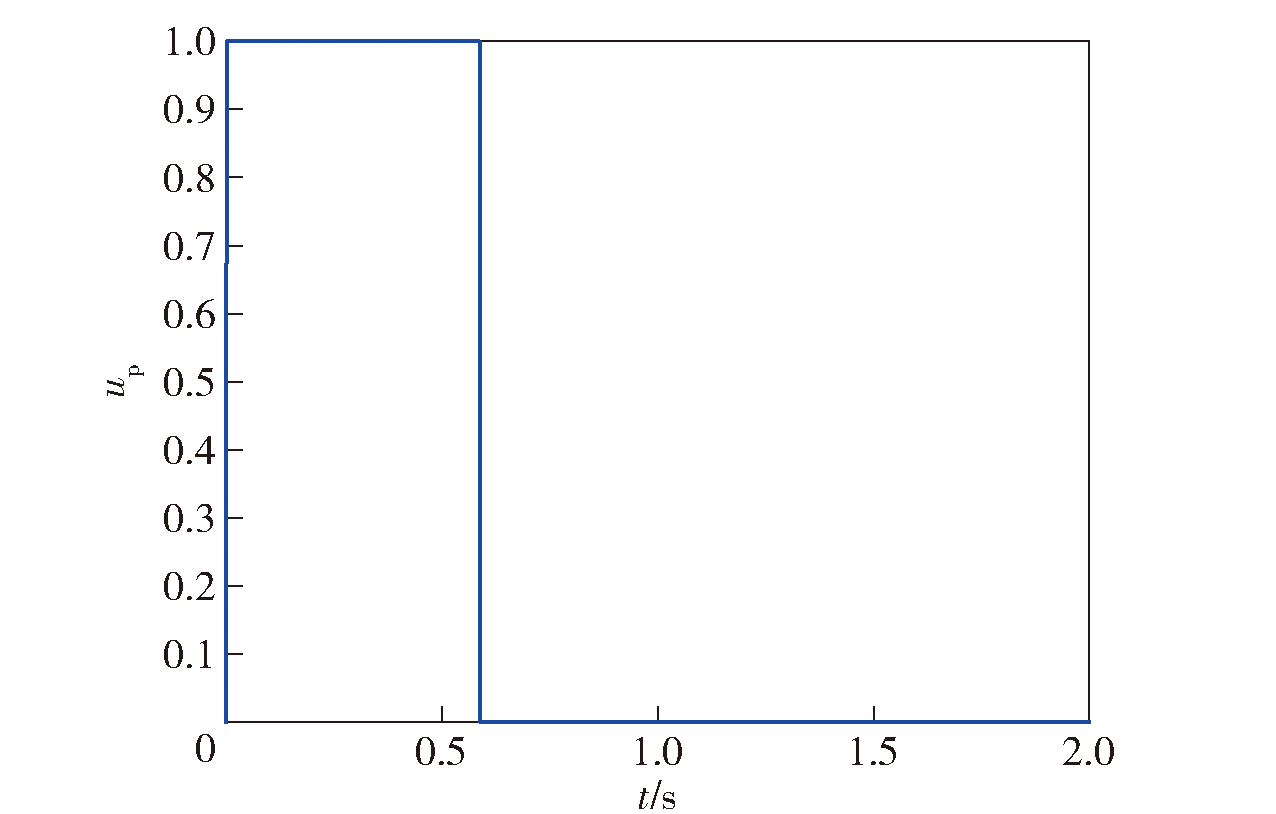
图16 柔性力指令曲线
Fig.16 Curve of flexible force command
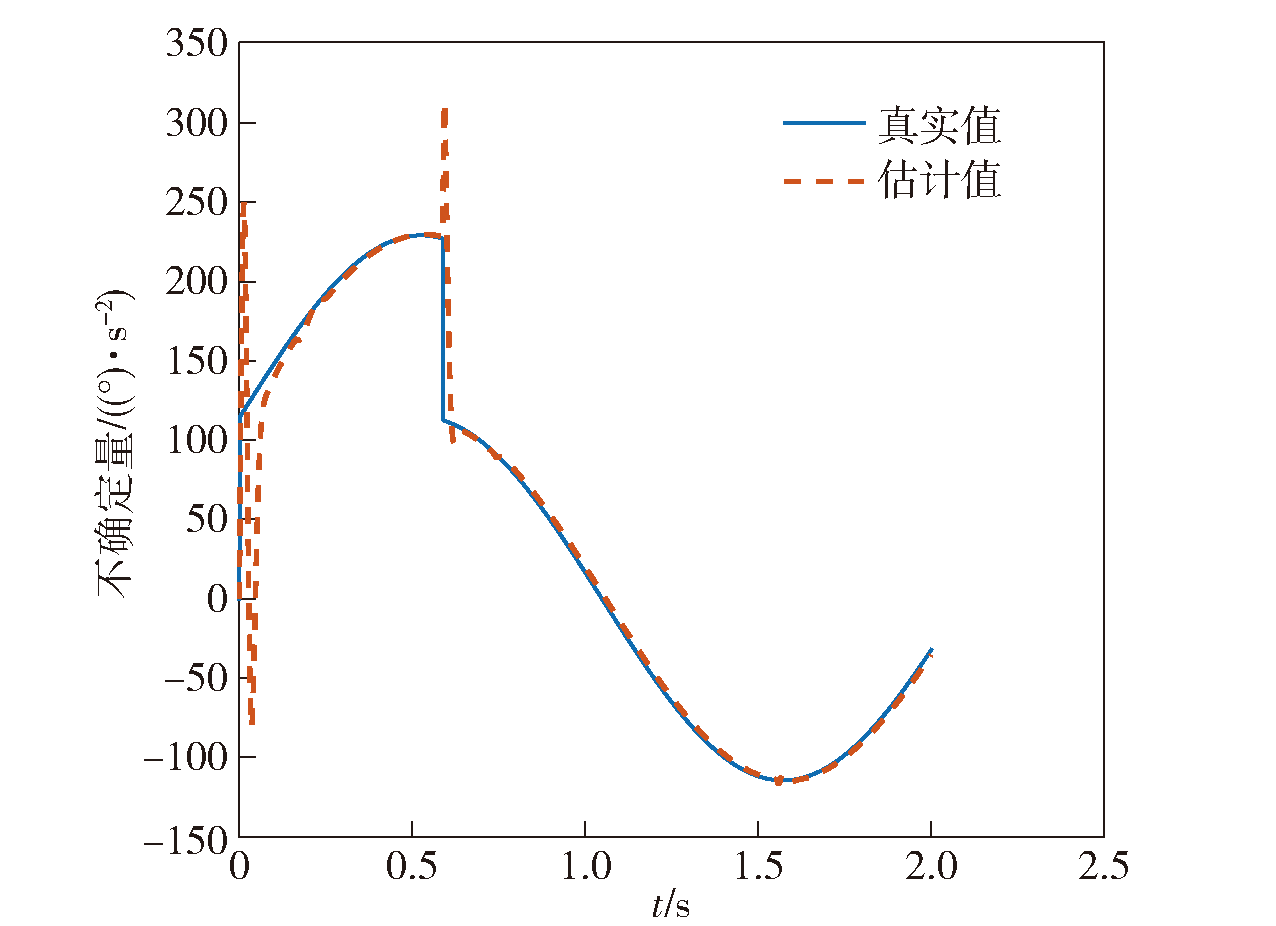
图17 不确定量变化曲线
Fig.17 Curves of uncertainty
| 参数 | 数值 |
|---|---|
| 质量/kg | 102.1573 |
| 转动惯量/(kg·m2) | 69.1467 |
| 特征长度/m | 0.1270 |
| 特征面积/m2 | 0.0127 |
表B1 弹箭结构参数
Table B1 Structural parameters of projectiles
| 参数 | 数值 |
|---|---|
| 质量/kg | 102.1573 |
| 转动惯量/(kg·m2) | 69.1467 |
| 特征长度/m | 0.1270 |
| 特征面积/m2 | 0.0127 |
| 攻角/(°) | Ma | Cnα | Cnδ | Cmα | Cmδ |
|---|---|---|---|---|---|
| 0.3 | 16.094 | 12.307 | -48.106 | -123.266 | |
| 10 | 0.6 | 13.212 | 12.485 | -46.822 | -124.985 |
| 0.8 | 10.875 | 12.124 | -44.777 | -121.278 | |
| 2.0 | 10.015 | 6.520 | -10.279 | -67.076 | |
| 0.3 | 6.578 | 5.690 | -68.927 | -56.992 | |
| 40 | 0.6 | 44.112 | 6.452 | -103.362 | -64.570 |
| 0.8 | 52.443 | 6.976 | -104.679 | -69.683 | |
| 2.0 | 31.581 | 4.864 | -58.786 | -50.008 | |
| 0.3 | 10.796 | 0 | 0 | 0 | |
| 80 | 0.6 | 11.156 | 0 | 0 | 0 |
| 0.8 | 11.529 | 0 | 0 | 0 | |
| 2.0 | 0 | 0 | 0 | 0 |
表B2 弹箭气动参数
Table B2 Aerodynamic coefficients of projectiles
| 攻角/(°) | Ma | Cnα | Cnδ | Cmα | Cmδ |
|---|---|---|---|---|---|
| 0.3 | 16.094 | 12.307 | -48.106 | -123.266 | |
| 10 | 0.6 | 13.212 | 12.485 | -46.822 | -124.985 |
| 0.8 | 10.875 | 12.124 | -44.777 | -121.278 | |
| 2.0 | 10.015 | 6.520 | -10.279 | -67.076 | |
| 0.3 | 6.578 | 5.690 | -68.927 | -56.992 | |
| 40 | 0.6 | 44.112 | 6.452 | -103.362 | -64.570 |
| 0.8 | 52.443 | 6.976 | -104.679 | -69.683 | |
| 2.0 | 31.581 | 4.864 | -58.786 | -50.008 | |
| 0.3 | 10.796 | 0 | 0 | 0 | |
| 80 | 0.6 | 11.156 | 0 | 0 | 0 |
| 0.8 | 11.529 | 0 | 0 | 0 | |
| 2.0 | 0 | 0 | 0 | 0 |
| 伞的攻角/(°) | Ma | CN | CT | Cmp |
|---|---|---|---|---|
| 10 | 0.2 | 0.080 | 0.550 | -0.018 |
| 0.6 | 0.084 | 0.627 | -0.020 | |
| 20 | 0.2 | 0.150 | 0.480 | -0.027 |
| 0.6 | 0.179 | 0.592 | -0.031 | |
| 30 | 0.2 | 0.280 | 0.400 | -0.035 |
| 0.6 | 0.340 | 0.482 | -0.042 | |
| 40 | 0.2 | 0.400 | 0.280 | -0.043 |
| 0.6 | 0.510 | 0.335 | -0.050 |
表B3 伞的气动参数
Table B3 Aerodynamic coefficients of parachute
| 伞的攻角/(°) | Ma | CN | CT | Cmp |
|---|---|---|---|---|
| 10 | 0.2 | 0.080 | 0.550 | -0.018 |
| 0.6 | 0.084 | 0.627 | -0.020 | |
| 20 | 0.2 | 0.150 | 0.480 | -0.027 |
| 0.6 | 0.179 | 0.592 | -0.031 | |
| 30 | 0.2 | 0.280 | 0.400 | -0.035 |
| 0.6 | 0.340 | 0.482 | -0.042 | |
| 40 | 0.2 | 0.400 | 0.280 | -0.043 |
| 0.6 | 0.510 | 0.335 | -0.050 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
刘祥, 李爱军, 郭永, 等. 固定时间收敛的空空导弹直接力/气动力复合控制[J]. 哈尔滨工业大学学报, 2019, 51(9):29-34,42.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
霍鑫, 彭继平, 马克茂, 等. 空空导弹敏捷转弯的分段线性滑模控制设计[J]. 系统工程与电子技术, 2017, 39(10):2278-2284.
|
|
doi: 10.3969/j.issn.1001-506X.2017.10.18 |
|
| [10] |
马悦悦, 唐胜景, 郭杰. 基于改进Terminal滑模的导弹大角度机动控制[J]. 北京航空航天大学学报, 2016, 42(3):472-480.
|
|
|
|
| [11] |
李政, 于剑桥, 赵新运. 空空导弹敏捷转弯固定时间收敛滑模控制[J]. 航空学报, 2023, 44(8):208-221.
|
|
|
|
| [12] |
赵新运, 于剑桥. 导弹敏捷转弯段的新型非奇异终端滑模控制[J]. 宇航学报, 2022, 43(4):454-464.
|
|
|
|
| [13] |
李健, 房冠辉, 吕智慧, 等. 天问一号火星探测器伞系减速分系统设计与验证[J]. 中国科学:技术科学, 2022, 52(2):264-277.
|
|
|
|
| [14] |
董捷, 饶炜, 孙泽洲, 等. 火星伞降段多体动力学特性分析与安全设计研究[J]. 中国科学:技术科学, 2022, 52(8):1175-1185.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
韩晋阳, 白春华, 檀盼龙. 伞降战斗部毁伤试验落点预测方法研究[J]. 兵工学报, 2020, 41(6):1077-1084.
doi: 10.3969/j.issn.1000-1093.2020.06.004 |
|
doi: 10.3969/j.issn.1000-1093.2020.06.004 |
|
| [20] |
|
| [21] |
|
| [22] |
王睿, 周洲, 郭荣化, 等. 太阳能无人机伞降着陆多体动力学仿真与试验[J]. 航空学报, 2022, 43(8): 456-468.
|
|
|
|
| [23] |
|
| [24] |
吴翰, 王正平, 周洲, 等. 无人机伞降回收十二自由度模型建立与仿真[J]. 西北工业大学学报, 2020, 38(1): 68-74.
|
|
|
|
| [25] |
|
| [26] |
唐乾刚, 张青斌, 张晓今, 等. 伞-弹系统九自由度动力学模型[J]. 兵工学报, 2007, 28(4):449-452.
|
|
|
|
| [27] |
唐乾刚, 王昱, 张青斌, 等. 伞-弹动力学及运动学在末敏弹目标识别中的应用[J]. 兵工学报, 2007, 28(7): 796-799.
|
|
|
|
| [28] |
|
| [29] |
王立武, 高庆玉, 许望晶, 等. 嫦娥五号返回器降落伞回收动力学建模与分析[J]. 宇航学报, 2021, 42(8):1051-1056.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
周文雅, 马瑞鑫, 胡欣涵, 等. 圆形降落伞下降轨迹控制研究[J]. 兵器装备工程学报, 2021, 42(1):26-30.
|
|
|
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000.
|
|
|
|
| [42] |
张良总, 杨涛, 吴云, 等. 基于图像测量的Stewart平台双阶控制技术[J]. 光电工程, 2022, 49(8):75-84.
|
|
|
|
| [43] |
吴燕生. 中国运载火箭姿态控制技术发展与展望[J]. 宇航学报, 2023, 44(4):509-518.
|
|
|
|
| [44] |
张科, 陈之光, 赵玉印. 国外高速导弹的头罩防护技术[J]. 红外与激光工程, 2013, 42(1):154-158.
|
|
|
|
| [45] |
|
| [46] |
|
| [47] |
梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38(5):552-557.
|
|
|
|
| [48] |
韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1):85-88.
|
|
|
|
| [49] |
|
| [50] |
doi: 10.1016/j.isatra.2015.07.012 pmid: 26275404 |
| [1] | 林忠麟, 王海涛, 刘文超, 甘锦裕, 张天宏, 黄峰. 基于多模式加速及反步滑模的航空发动机压气机压力模拟方法[J]. 兵工学报, 2024, 45(6): 1776-1786. |
| [2] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [3] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [4] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [5] | 王治霖, 王江, 祁琪, 范世鹏. 基于LESO的新型自适应鲁棒滚转通道控制算法[J]. 兵工学报, 2023, 44(7): 1920-1929. |
| [6] | 高雨轩, 侯远龙, 高强, 侯润民. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4): 1071-1085. |
| [7] | 高强, 侯远龙, 吕明明, 毛斌, 侯润民, 羊书毅, 吴斌. 某新型车载多管负载行进间稳定控制方法[J]. 兵工学报, 2023, 44(3): 736-747. |
| [8] | 董金鲁, 马悦萌, 周荻, 龚晓刚, 张曦, 宋加洪. 临近空间高超声速飞行器的直接力与襟翼复合滑模控制[J]. 兵工学报, 2023, 44(2): 496-506. |
| [9] | 苗双全, 张宝泉, 王明超, 王新伟, 沈宇. 基于扰动观测器的机载光电稳定平台自适应指数时变滑模控制[J]. 兵工学报, 2022, 43(7): 1636-1645. |
| [10] | 薛栋, 刘金, 王欢, 尹晋涛, 江春茂, 袁先士. CG-01高速风洞弹箭模型动稳定性导数实验系统设计[J]. 兵工学报, 2021, 42(11): 2522-2530. |
| [11] | 陈路明, 廖自力, 张征. 基于路面自适应的多轮轮毂电机驱动车辆驱动防滑控制[J]. 兵工学报, 2021, 42(10): 2278-2290. |
| [12] | 聂守成, 钱林方, 陈志群, 卫俞凯, 尹强. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制[J]. 兵工学报, 2020, 41(9): 1745-1751. |
| [13] | 余跃, 王宏伦. 基于深度学习的高超声速飞行器再入预测校正容错制导[J]. 兵工学报, 2020, 41(4): 656-669. |
| [14] | 余磊, 张永励, 袁梦笛, 刘瑞卿. 基于泛函序列时变自回归滑动平均模型的弹箭时变模态参数递推估计方法[J]. 兵工学报, 2020, 41(11): 2189-2197. |
| [15] | 陈升富, 常思江, 吴放. 带有视场角约束的滑模攻击时间控制制导律[J]. 兵工学报, 2019, 40(4): 777-787. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4