
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3382-3393.doi: 10.12382/bgxb.2023.0763
所属专题: 群体协同与自主技术
王康, 司鹏, 陈莉, 李忠新*( ), 吴志林**()
), 吴志林**()
收稿日期:2023-08-18
上线日期:2023-11-02
通讯作者:
基金资助:
WANG Kang, SI Peng, CHEN Li, LI Zhongxin*(), WU Zhilin**()
Received:2023-08-18
Online:2023-11-02
摘要:
针对传统沙猫群(SCSO)算法全局搜索能力不足、易陷入局部最优等问题,提出一种改进沙猫群(LVSCSO)算法。该算法引入非线性调整机制,更好地体现出SCSO算法的搜寻和攻击过程;同时引入自适应莱维飞行机制,有效提高了算法的全局搜索能力和跳出局部最优的能力。采用栅格法构建无人机野外环境模型和复杂城市环境模型,以综合航迹长度、飞行高度和飞行转角的适应度函数为衡量指标,进行了算法的仿真验证。研究结果表明:在野外环境模型下,相较于传统SCSO算法和粒子群优化算法,该改进算法分别提升56.40%和22.06%;在复杂城市环境模型下,相较于传统SCSO算法和粒子群优化算法,该改进算法分别提升了56.33%和61.80%;新的LVSCSO算法在航迹规划上具有有效性和优越性。
中图分类号:
王康, 司鹏, 陈莉, 李忠新, 吴志林. 基于改进沙猫群算法的无人机三维航迹规划[J]. 兵工学报, 2023, 44(11): 3382-3393.
WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm[J]. Acta Armamentarii, 2023, 44(11): 3382-3393.
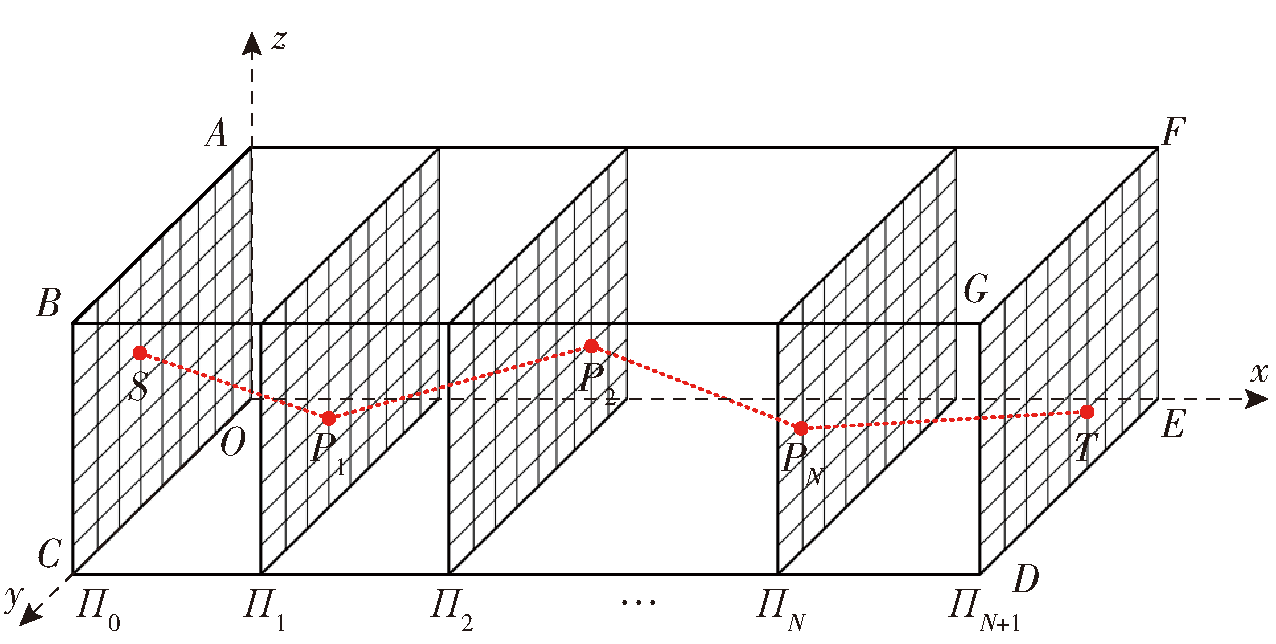
图1 栅格法环境建模
Fig.1 Environment modeling by raster method
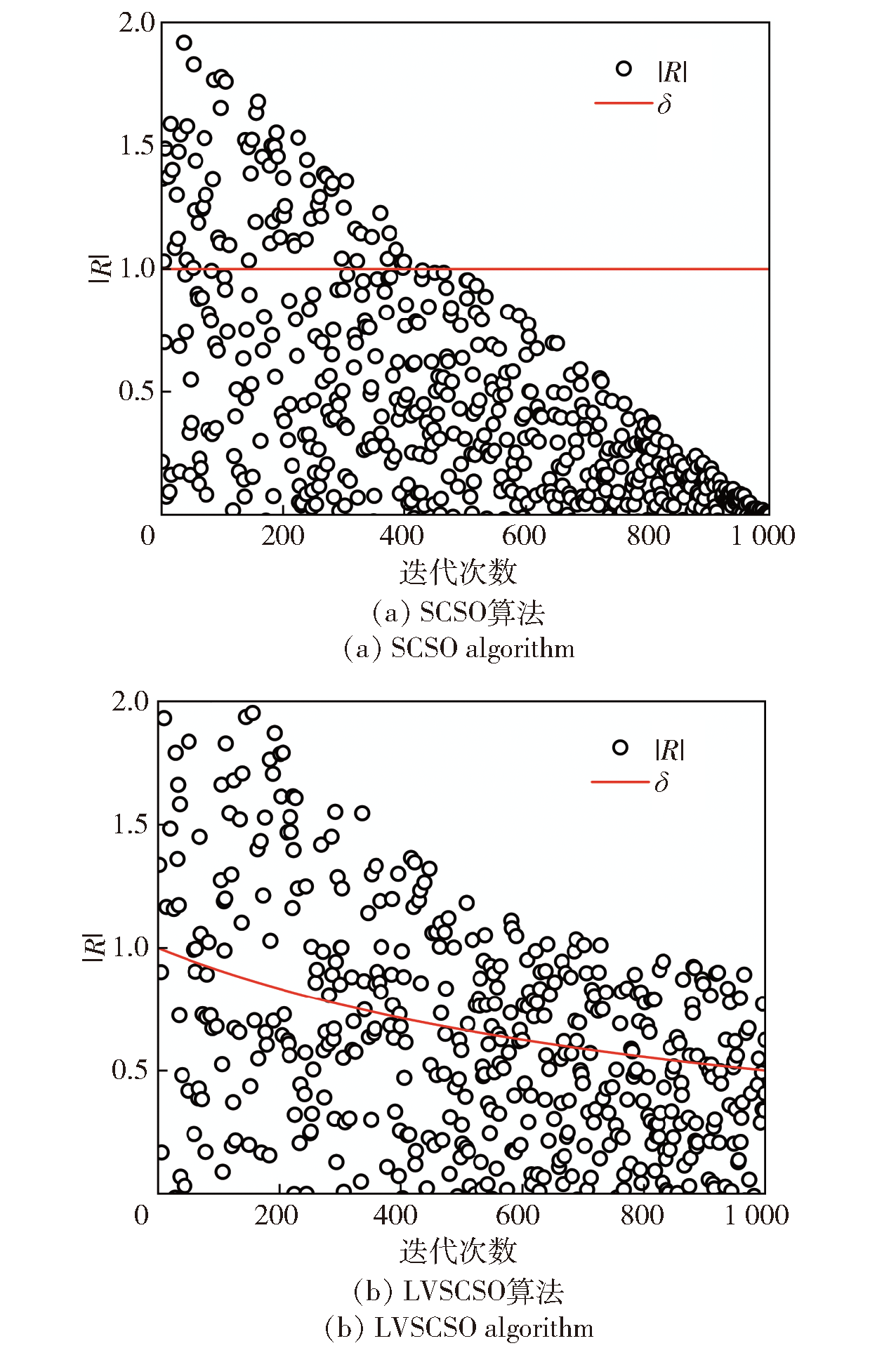
图2 |R|值随迭代次数的变化曲线
Fig.2 Variation curve of |R| value with the number of iterations
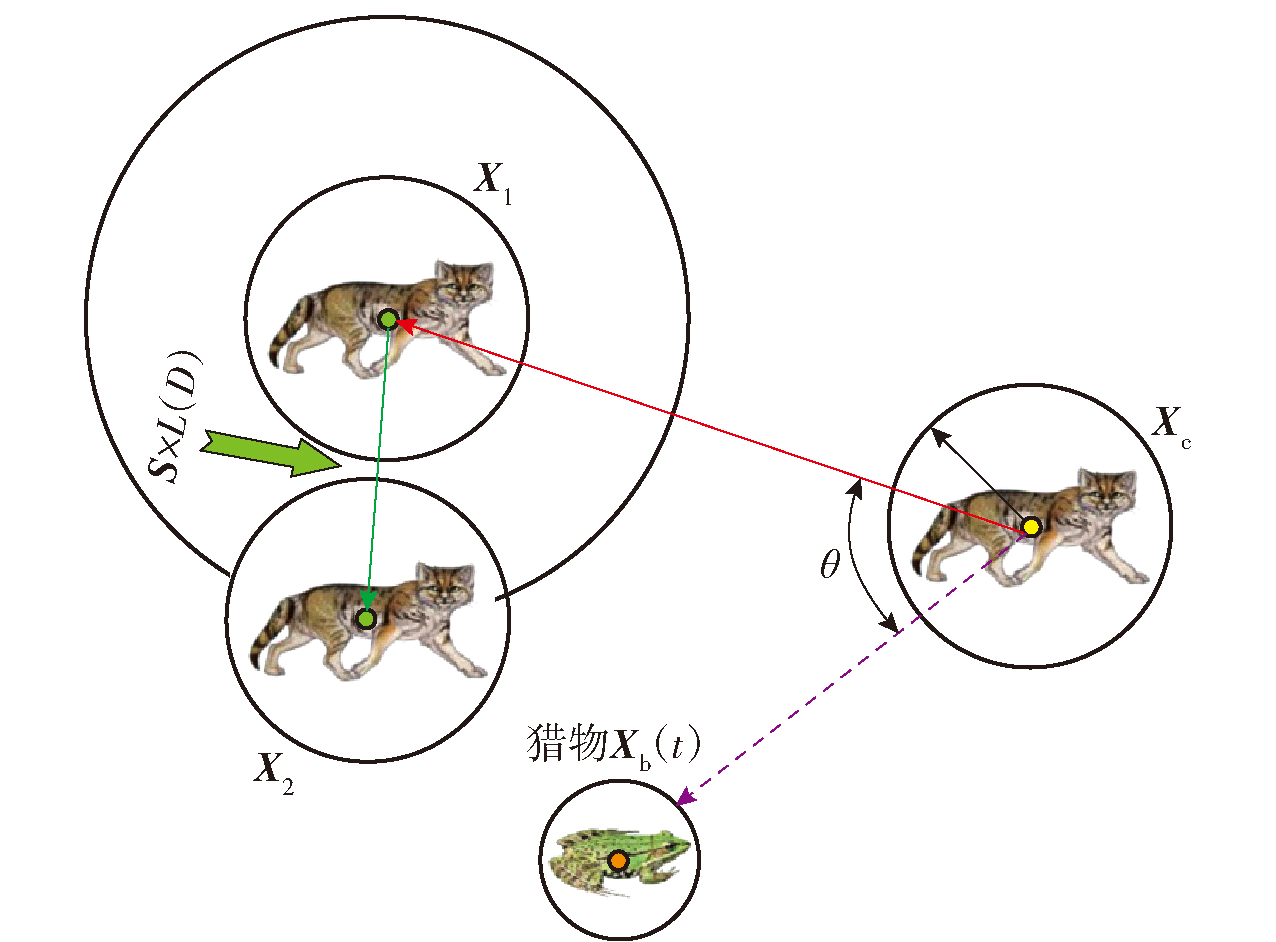
图3 迭代更新示意图
Fig.3 Schematic diagram of iterative update
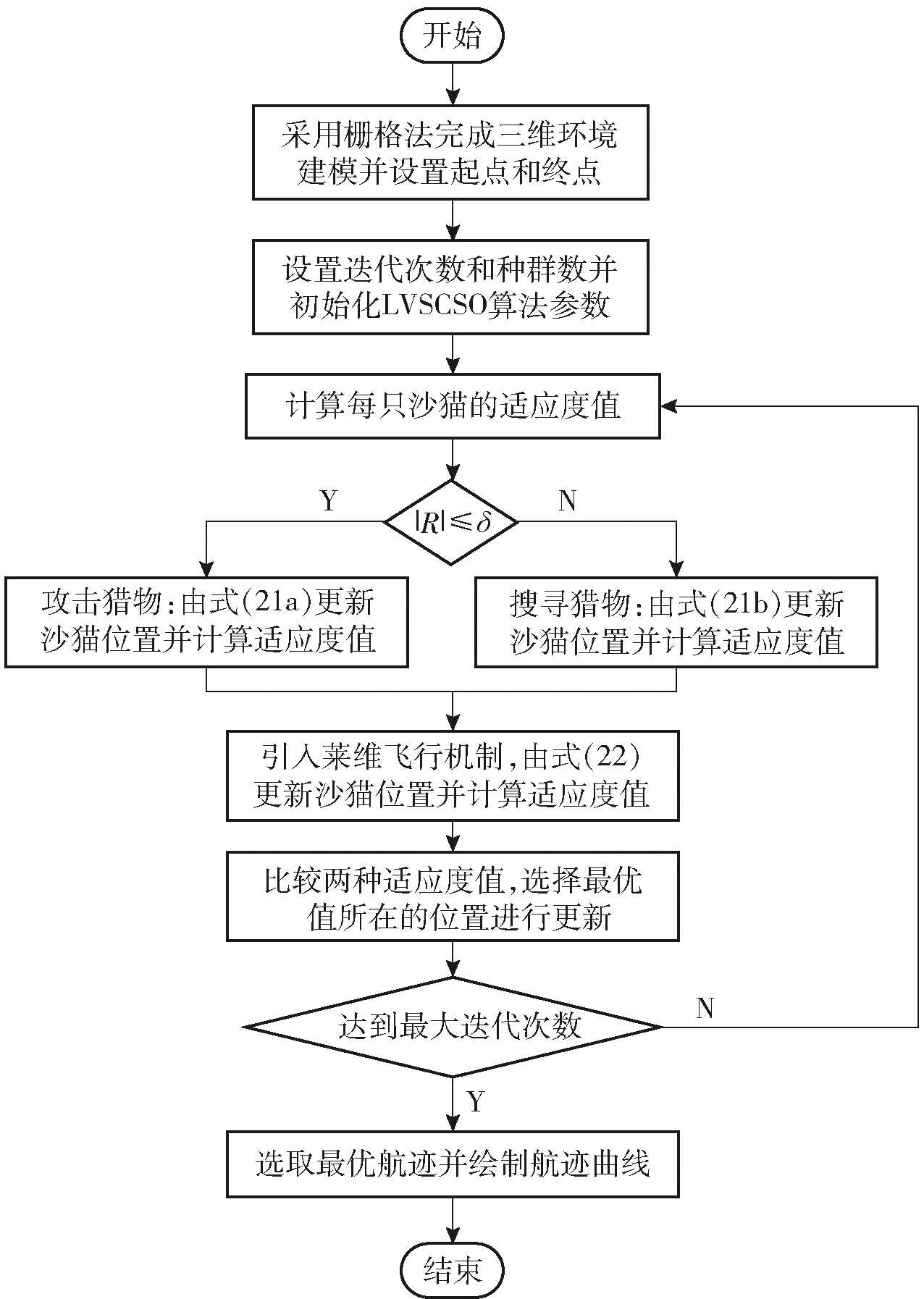
图4 LVSCSO算法流程图
Fig.4 Flow chart of LVSCSO algorithm
| 算法 | 参数 | 取值 | 算法 | 参数 | 取值 |
|---|---|---|---|---|---|
| LVSCSO | rG | [2,0] | ω | 0.5 | |
| R | [-rG,rG] | PSO | c1 | 2 | |
| SCSO | rG | [2,0] | c2 | 2 | |
| R | [-rG,rG] |
表1 各算法参数取值
Table 1 Parameter values of each algorithm
| 算法 | 参数 | 取值 | 算法 | 参数 | 取值 |
|---|---|---|---|---|---|
| LVSCSO | rG | [2,0] | ω | 0.5 | |
| R | [-rG,rG] | PSO | c1 | 2 | |
| SCSO | rG | [2,0] | c2 | 2 | |
| R | [-rG,rG] |
| 模型 | 山体中心 (xmassi, ymassi)/ km | 山体坡度 (xm,di, ym,di) | 山体 高度 hi/ km | 威胁中心 (xmeni, ymeni)/ km | 威胁 半径 Rmeni/ km | |
|---|---|---|---|---|---|---|
| 模型1 | (37,10) | (7.2,8) | 4 | (10,10) | 6 | |
| (27,9) | (6.4,5) | 3.5 | (28,35) | 5 | ||
| (12,25) | (8,9.6) | 5 | (20,45) | 4.5 | ||
| (39,32) | (6,10) | 6 | (35,45) | 4 | ||
| (13,40) | (4.7,6) | 3 | (25,15) | 5.5 | ||
| (40,10) | (6,7) | 5.5 | (18,7) | 5 | ||
| (10,17) | (6,8) | 4 | (43,35) | 5 | ||
| 模型2 | (35,25) | (9,8.8) | 6 | (15,45) | 4.5 | |
| (15,30) | (8,10) | 6 | (35,45) | 4 | ||
| (25,40) | (5,7) | 4.5 | (28,15) | 5.5 | ||
| (35,12) | (7,7) | 6 | (13,10) | 5.5 | ||
| (25,15) | (6.6,8) | 3 | (32,35) | 5 | ||
| 模型3 | (12,23) | (8.8,7) | 6 | (15,40) | 4.5 | |
| (23,34) | (8,9) | 5 | (40,25) | 4 | ||
| (35,41) | (5,7.6) | 4 | (25,15) | 6 |
表2 山体模型参数和威胁模型参数
Table 2 Parameters of mountain model and threat model
| 模型 | 山体中心 (xmassi, ymassi)/ km | 山体坡度 (xm,di, ym,di) | 山体 高度 hi/ km | 威胁中心 (xmeni, ymeni)/ km | 威胁 半径 Rmeni/ km | |
|---|---|---|---|---|---|---|
| 模型1 | (37,10) | (7.2,8) | 4 | (10,10) | 6 | |
| (27,9) | (6.4,5) | 3.5 | (28,35) | 5 | ||
| (12,25) | (8,9.6) | 5 | (20,45) | 4.5 | ||
| (39,32) | (6,10) | 6 | (35,45) | 4 | ||
| (13,40) | (4.7,6) | 3 | (25,15) | 5.5 | ||
| (40,10) | (6,7) | 5.5 | (18,7) | 5 | ||
| (10,17) | (6,8) | 4 | (43,35) | 5 | ||
| 模型2 | (35,25) | (9,8.8) | 6 | (15,45) | 4.5 | |
| (15,30) | (8,10) | 6 | (35,45) | 4 | ||
| (25,40) | (5,7) | 4.5 | (28,15) | 5.5 | ||
| (35,12) | (7,7) | 6 | (13,10) | 5.5 | ||
| (25,15) | (6.6,8) | 3 | (32,35) | 5 | ||
| 模型3 | (12,23) | (8.8,7) | 6 | (15,40) | 4.5 | |
| (23,34) | (8,9) | 5 | (40,25) | 4 | ||
| (35,41) | (5,7.6) | 4 | (25,15) | 6 |
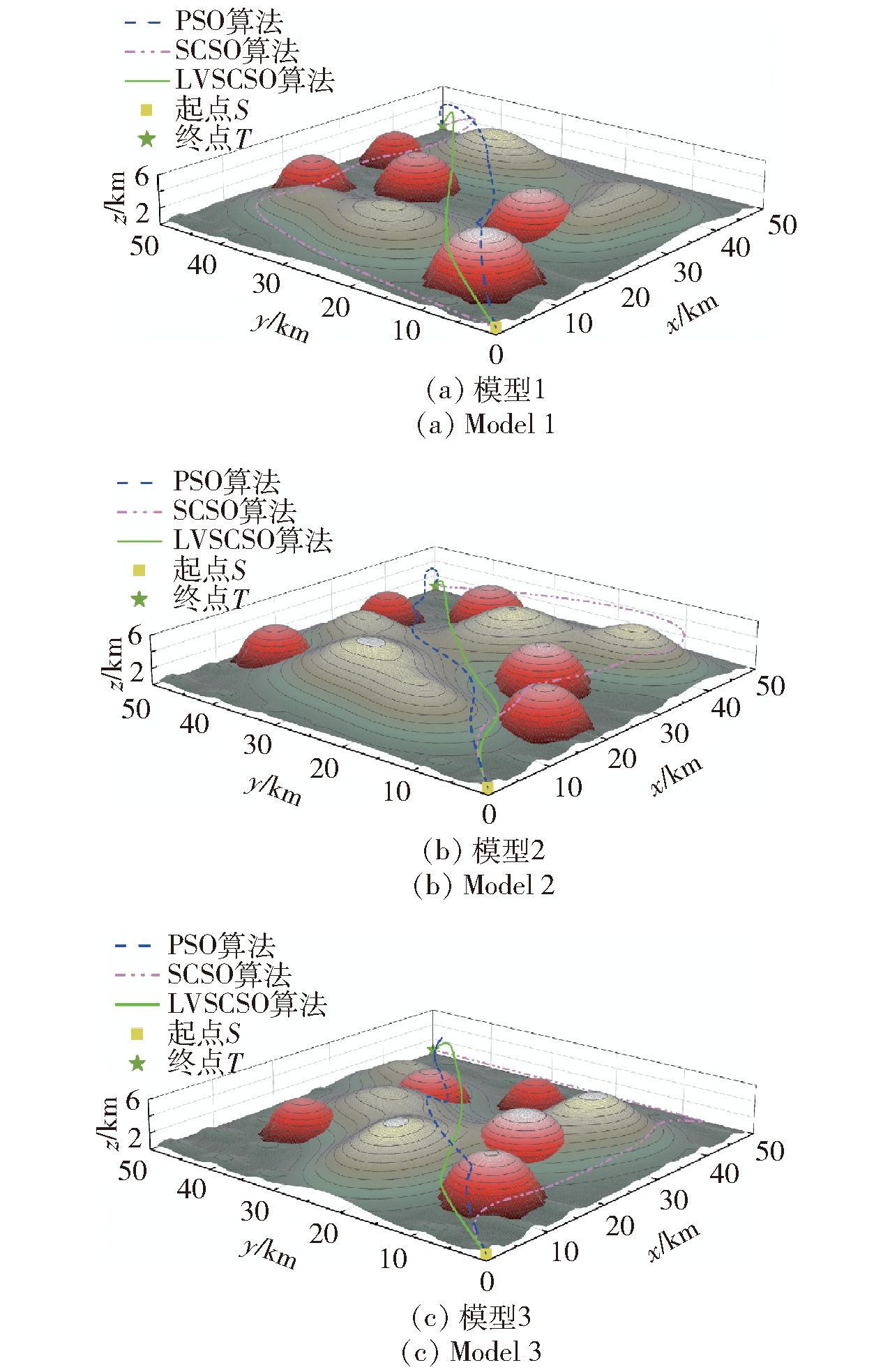
图5 3种野外环境模型下的航迹规划对比
Fig.5 Comparison of flight path planning in three wilderness environment models

图6 3种野外环境模型下的航迹规划对比俯视图
Fig.6 Contrast top view of flight path planning in three wilderness environment models
| 模型 | 最优值及平均值 | LVSCSO算法 | SCSO算法 | PSO算法 |
|---|---|---|---|---|
| 模型1 | 最优值 | 0.2135 | 0.6051 | 0.3395 |
| 平均值 | 0.2725 | 0.6431 | 0.3718 | |
| 模型2 | 最优值 | 0.1705 | 0.6230 | 0.3137 |
| 平均值 | 0.2921 | 0.6675 | 0.3527 | |
| 模型3 | 最优值 | 0.1960 | 0.5981 | 0.3243 |
| 平均值 | 0.2779 | 0.6218 | 0.3565 | |
| 总平均值 | 0.2808 | 0.6441 | 0.3603 |
表3 3种野外环境模型下的适应度函数值
Table 3 Fitness function values of three wilderness environment models
| 模型 | 最优值及平均值 | LVSCSO算法 | SCSO算法 | PSO算法 |
|---|---|---|---|---|
| 模型1 | 最优值 | 0.2135 | 0.6051 | 0.3395 |
| 平均值 | 0.2725 | 0.6431 | 0.3718 | |
| 模型2 | 最优值 | 0.1705 | 0.6230 | 0.3137 |
| 平均值 | 0.2921 | 0.6675 | 0.3527 | |
| 模型3 | 最优值 | 0.1960 | 0.5981 | 0.3243 |
| 平均值 | 0.2779 | 0.6218 | 0.3565 | |
| 总平均值 | 0.2808 | 0.6441 | 0.3603 |
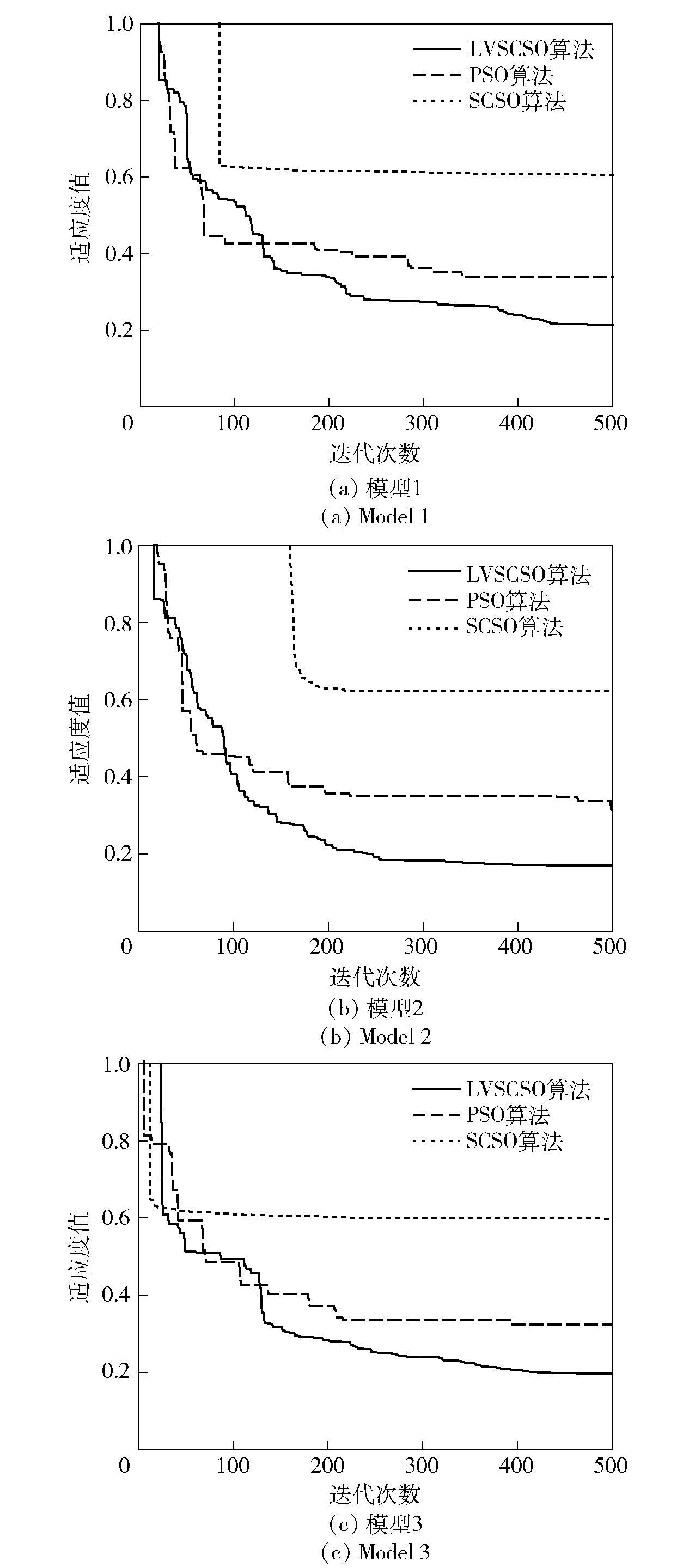
图7 3种野外环境模型下的适应度函数迭代曲线
Fig.7 Iterative curves of fitness function in three wilderness environment models
| 模型 | 中心位置/ m | 高度/ m | 半径/ m | 中心位置/ m | 高度/ m | 半径/ m | |
|---|---|---|---|---|---|---|---|
| (400,400) | 350 | 60 | (180,450) | 400 | 75 | ||
| (100,700) | 600 | 80 | (500,100) | 550 | 100 | ||
| 模型1 | (500,580) | 450 | 65 | (400,750) | 500 | 70 | |
| (800,120) | 600 | 120 | (800,450) | 900 | 90 | ||
| (600,850) | 580 | 80 | (790,880) | 620 | 88 | ||
| (400,300) | 450 | 70 | (400,800) | 580 | 62 | ||
| (150,400) | 410 | 70 | (800,120) | 630 | 118 | ||
| 模型2 | (180,600) | 550 | 85 | (600,450) | 880 | 83 | |
| (450,100) | 600 | 99 | (600,800) | 600 | 90 | ||
| (800,550) | 550 | 70 | (800,900) | 550 | 80 | ||
| (300,300) | 350 | 66 | (380,800) | 600 | 76 | ||
| (220,480) | 520 | 78 | (750,120) | 450 | 118 | ||
| 模型3 | (120,680) | 530 | 82 | (780,400) | 760 | 70 | |
| (500,100) | 580 | 99 | (560,900) | 620 | 76 | ||
| (500,480) | 560 | 80 | (720,790) | 750 | 90 |
表4 建筑物模型参数
Table 4 Building model parameters
| 模型 | 中心位置/ m | 高度/ m | 半径/ m | 中心位置/ m | 高度/ m | 半径/ m | |
|---|---|---|---|---|---|---|---|
| (400,400) | 350 | 60 | (180,450) | 400 | 75 | ||
| (100,700) | 600 | 80 | (500,100) | 550 | 100 | ||
| 模型1 | (500,580) | 450 | 65 | (400,750) | 500 | 70 | |
| (800,120) | 600 | 120 | (800,450) | 900 | 90 | ||
| (600,850) | 580 | 80 | (790,880) | 620 | 88 | ||
| (400,300) | 450 | 70 | (400,800) | 580 | 62 | ||
| (150,400) | 410 | 70 | (800,120) | 630 | 118 | ||
| 模型2 | (180,600) | 550 | 85 | (600,450) | 880 | 83 | |
| (450,100) | 600 | 99 | (600,800) | 600 | 90 | ||
| (800,550) | 550 | 70 | (800,900) | 550 | 80 | ||
| (300,300) | 350 | 66 | (380,800) | 600 | 76 | ||
| (220,480) | 520 | 78 | (750,120) | 450 | 118 | ||
| 模型3 | (120,680) | 530 | 82 | (780,400) | 760 | 70 | |
| (500,100) | 580 | 99 | (560,900) | 620 | 76 | ||
| (500,480) | 560 | 80 | (720,790) | 750 | 90 |
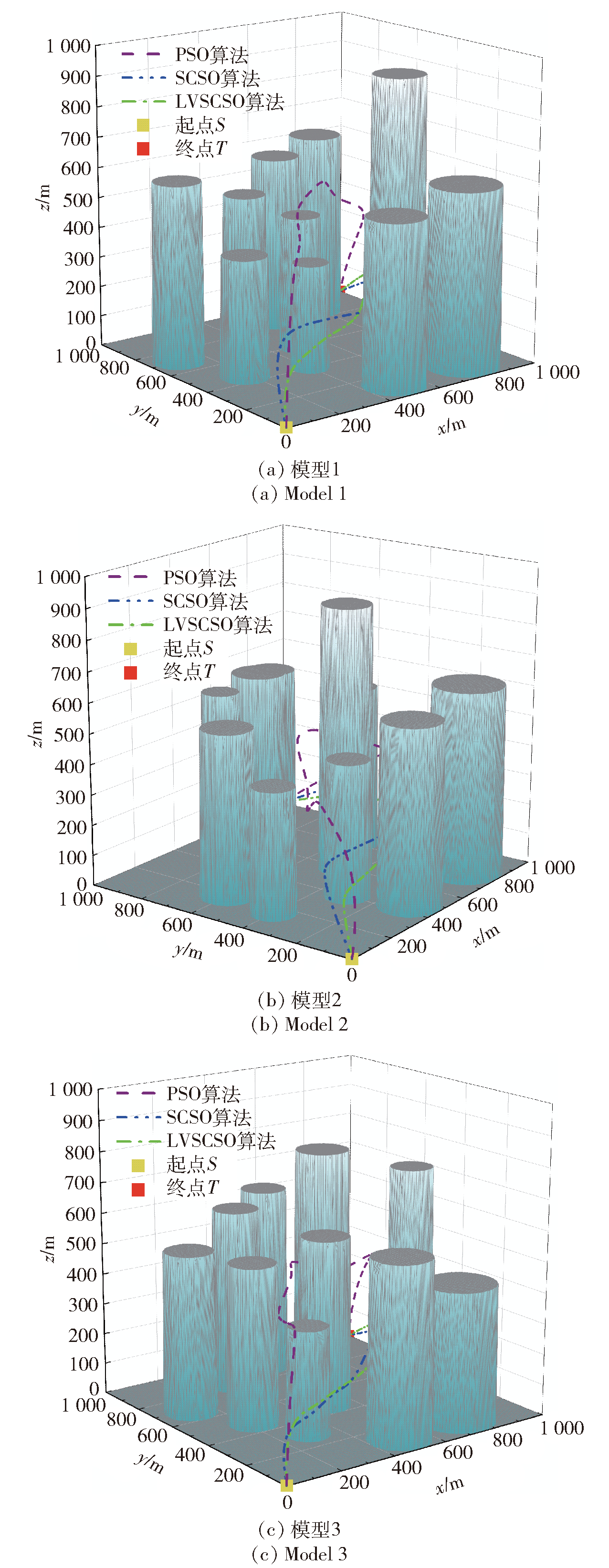
图8 3种城市环境模型下的航迹规划对比
Fig.8 Comparison of flight path planning in three urban environment models
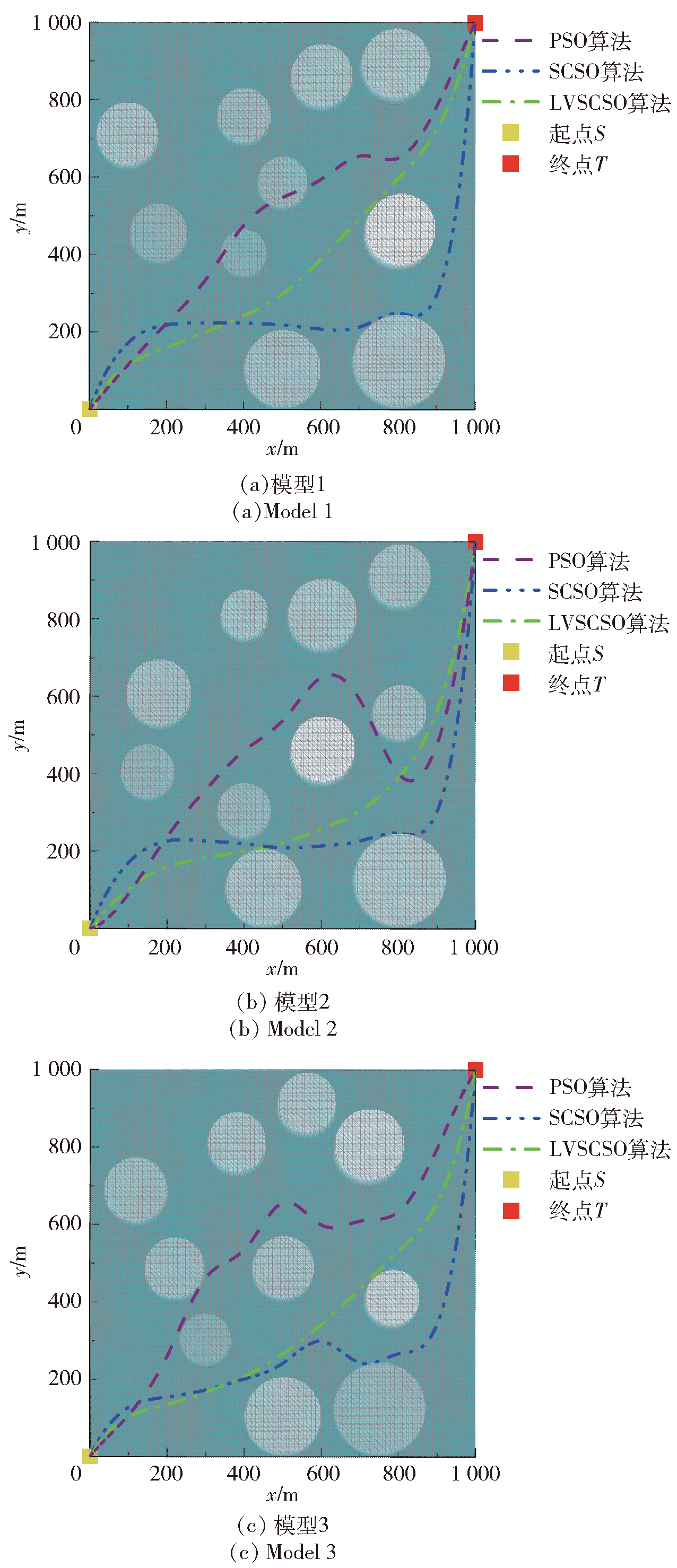
图9 3种城市环境模型下的航迹规划对比俯视图
Fig.9 Contrast top view of flight path planning in three urban environment models
| 模型 | 最优值及平均值 | LVSCSO算法 | SCSO算法 | PSO算法 |
|---|---|---|---|---|
| 模型1 | 最优值 | 0.1096 | 0.2841 | 0.4156 |
| 平均值 | 0.1643 | 0.3510 | 0.4905 | |
| 模型2 | 最优值 | 0.1099 | 0.2792 | 0.4640 |
| 平均值 | 0.1909 | 0.4690 | 0.5346 | |
| 模型3 | 最优值 | 0.1236 | 0.3056 | 0.4242 |
| 平均值 | 0.2387 | 0.5403 | 0.5298 | |
| 总平均值 | 0.1980 | 0.4534 | 0.5183 |
表5 3种城市环境模型下的适应度函数值
Table 5 Fitness function values of three urban environment models
| 模型 | 最优值及平均值 | LVSCSO算法 | SCSO算法 | PSO算法 |
|---|---|---|---|---|
| 模型1 | 最优值 | 0.1096 | 0.2841 | 0.4156 |
| 平均值 | 0.1643 | 0.3510 | 0.4905 | |
| 模型2 | 最优值 | 0.1099 | 0.2792 | 0.4640 |
| 平均值 | 0.1909 | 0.4690 | 0.5346 | |
| 模型3 | 最优值 | 0.1236 | 0.3056 | 0.4242 |
| 平均值 | 0.2387 | 0.5403 | 0.5298 | |
| 总平均值 | 0.1980 | 0.4534 | 0.5183 |
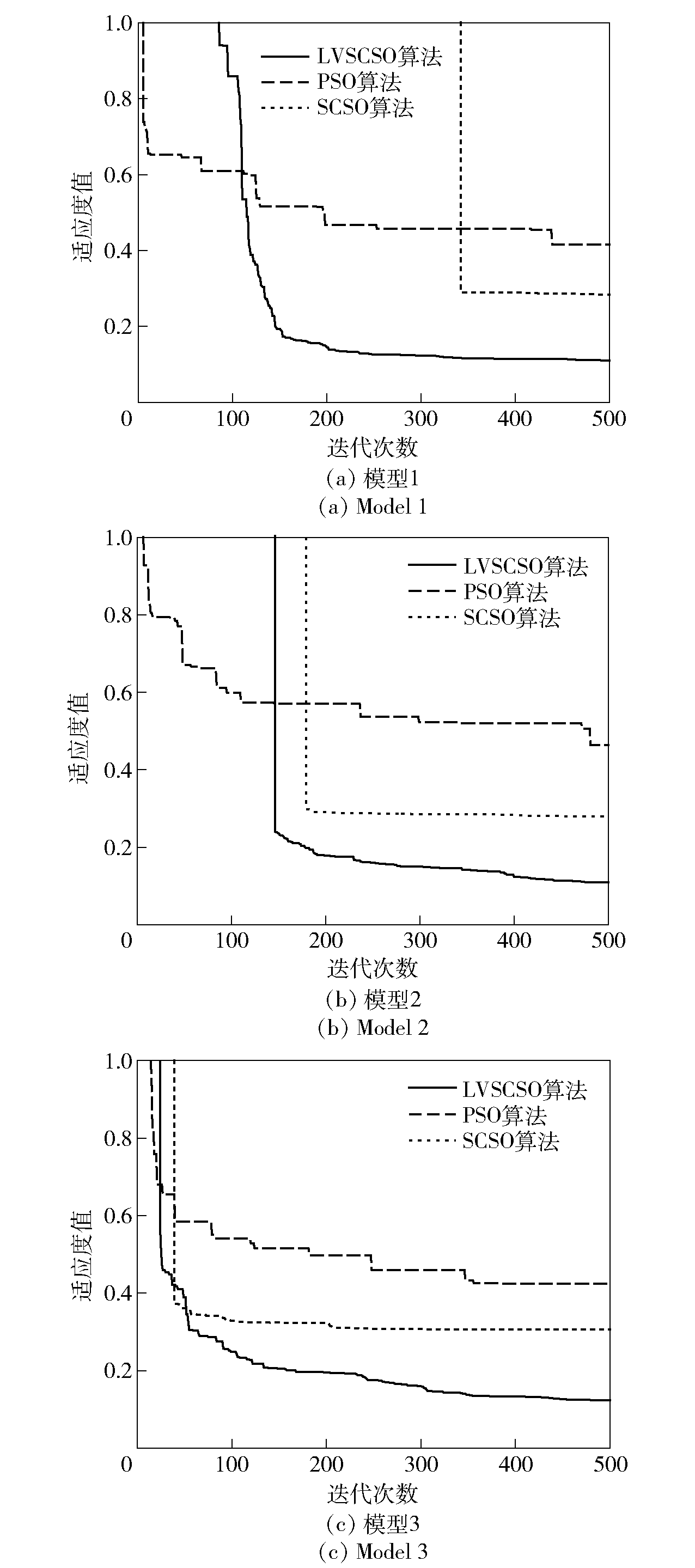
图10 3种城市环境模型下的适应度函数迭代曲线
Fig.10 Iterative curves of fitness function in three urban environment models
| [1] |
李昌玺, 孙玉彪, 范泽昊, 等. 无人作战平台发展现状及趋势[J]. 中国电子科学研究院学报, 2023, 18(3):274-279.
|
|
|
|
| [2] |
张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41(7):254-264.
|
|
|
|
| [3] |
王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5):1461-1468.
doi: 10.12305/j.issn.1001-506X.2023.05.22 |
|
doi: 10.12305/j.issn.1001-506X.2023.05.22 |
|
| [4] |
张飞凯, 黄永忠, 李连茂, 等. 基于Dijkstra算法的货运索道路径规划方法[J]. 山东大学学报(工学版), 2022, 52(6):176-182.
|
|
|
|
| [5] |
张韬, 项祺, 郑婉文, 等. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4):960-968.
doi: 10.12382/bgxb.2021.0209 |
|
|
|
| [6] |
胡铮, 徐斌. 融合A*算法与人工势场法的动态路径规划[J]. 组合机床与自动化加工技术, 2023(7):46-49.
|
|
|
|
| [7] |
黄翼虎, 于亚楠. 基于改进Dijkstra算法的防冲突最短路径规划研究[J]. 计算机与现代化, 2022(8):20-24.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
doi: 10.1109/MCI.2006.329691 URL |
| [11] |
胡致远, 王征, 杨洋, 等. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7):1676-1684.
doi: 10.12382/bgxb.2021.0215 |
|
doi: 10.12382/bgxb.2021.0215 |
|
| [12] |
赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10):2598-2608.
|
|
|
|
| [13] |
黄鹤, 吴琨, 王会峰, 等. 基于改进飞蛾扑火算法的无人机低空突防路径规划[J]. 中国惯性技术学报, 2021, 29 (2):256-263.
|
|
|
|
| [14] |
郭威, 吴凯, 周悦, 等. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6):1387-1394.
doi: 10.12382/bgxb.2021.0342 |
|
doi: 10.12382/bgxb.2021.0342 |
|
| [15] |
doi: 10.1007/s00366-022-01604-x |
| [16] |
doi: 10.1016/j.advengsoft.2023.103423 URL |
| [17] |
doi: 10.1016/j.advengsoft.2023.103411 URL |
| [18] |
doi: 10.3390/math11102340 URL |
| [19] |
董惠敏, 安海鹏, 张楚. 基于栅格法的人字齿有限元接触精确建模方法[J]. 华中科技大学学报(自然科学版), 2022, 50(3):87-93.
|
|
|
|
| [20] |
熊光明, 于全富, 胡秀中, 等. 考虑平台特性的多层建筑物内履带式无人平台运动规划[J]. 兵工学报, 2023, 44 (3):841-850.
doi: 10.12382/bgxb.2021.0800 |
|
doi: 10.12382/bgxb.2021.0800 |
|
| [21] |
王磊. 海洋环境下水下机器人快速路径规划研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
|
|
|
|
| [22] |
张舒然. 基于群智算法的无人机航迹规划研究[D]. 成都: 电子科技大学, 2020.
|
|
|
|
| [23] |
doi: 10.3390/s21041224 URL |
| [24] |
张昀普, 单甘霖. 道路约束下多传感器协同地面目标跟踪的管理方法[J]. 兵工学报, 2022, 43(3):542-555.
doi: 10.12382/bgxb.2021.0122 |
|
doi: 10.12382/bgxb.2021.0122 |
|
| [25] |
宋志强, 夏庆锋, 陈少博, 等. 基于改进球面向量粒子群优化的UAV航迹规划[J]. 电光与控制, 2023, 30(4):56-60.
|
|
|
|
| [26] |
蔺文轩, 谢文俊, 张鹏, 等. 基于分组优化改进粒子群算法的无人机三维路径规划[J]. 火力与指挥控制, 2023, 48(1): 20-25,32.
|
|
|
|
| [27] |
苟进展, 吴宇, 邓嘉宁. 基于群智能-一致性理论的无人机编队全过程飞行航迹规划方法[J]. 控制与决策, 2023, 38 (5) :1464-1472.
|
|
|
|
| [28] |
刘晓琴. 基于GRU的四旋翼无人机飞行姿态估计[D]. 桂林: 桂林电子科技大学, 2021.
|
|
|
| [1] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [2] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [5] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [6] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [7] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [8] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [9] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [10] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [11] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [12] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [13] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [14] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [15] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4