
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (11): 4175-4190.doi: 10.12382/bgxb.2024.0485
• • 上一篇
王彬1,2, 张建书1,2,*( ), 段志峰1,2, 岳淇星1,2, 刚宽宽1,2, 苗阳阳1,2
), 段志峰1,2, 岳淇星1,2, 刚宽宽1,2, 苗阳阳1,2
收稿日期:2024-06-19
上线日期:2024-11-26
通讯作者:
基金资助:
WANG Bin1,2, ZHANG Jianshu1,2,*(), DUAN Zhifeng1,2, YUE Qixing1,2, GANG Kuankuan1,2, MIAO Yangyang1,2
Received:2024-06-19
Online:2024-11-26
摘要:
考虑行进间坦克炮控系统受路面颠簸引起的外界扰动和炮控系统工作时火炮俯仰运动不平衡力矩影响,基于第二类Lagrange方法建立行进间坦克炮控系统两轴耦合2自由度动力学模型。针对炮控系统的实际受力和运动状态,建立方位向和高低向驱动系统含有永磁同步电机以及传动机构分别含有齿轮减速箱与滚柱丝杠的行进间坦克炮控系统机电耦合动力学模型。为快速抑制行进间坦克炮控系统内外扰动对目标稳定跟踪的影响,基于非奇异快速终端滑模控制律和线性扩张状态观测器设计具有有限时间收敛特性的行进间坦克稳定跟踪控制器。根据行进间坦克炮控系统对目标的稳定跟踪过程计算炮控系统稳定精度和到位时间,并在不同工况下与传统控制方法进行对比。研究结果表明,新方法响应速度快、抗干扰能力强、稳定精度高,验证了控制器设计的有效性。
中图分类号:
王彬, 张建书, 段志峰, 岳淇星, 刚宽宽, 苗阳阳. 行进间坦克炮控系统动力学建模与稳定控制[J]. 兵工学报, 2024, 45(11): 4175-4190.
WANG Bin, ZHANG Jianshu, DUAN Zhifeng, YUE Qixing, GANG Kuankuan, MIAO Yangyang. Dynamics Modeling and Stability Control of Marching Tank Gun Control System[J]. Acta Armamentarii, 2024, 45(11): 4175-4190.

图1 坦克炮控系统坐标系示意图
Fig.1 TGCS coordinate system

图2 方位向执行机构简化模型
Fig.2 Simplified model of azimuth drive mechanism
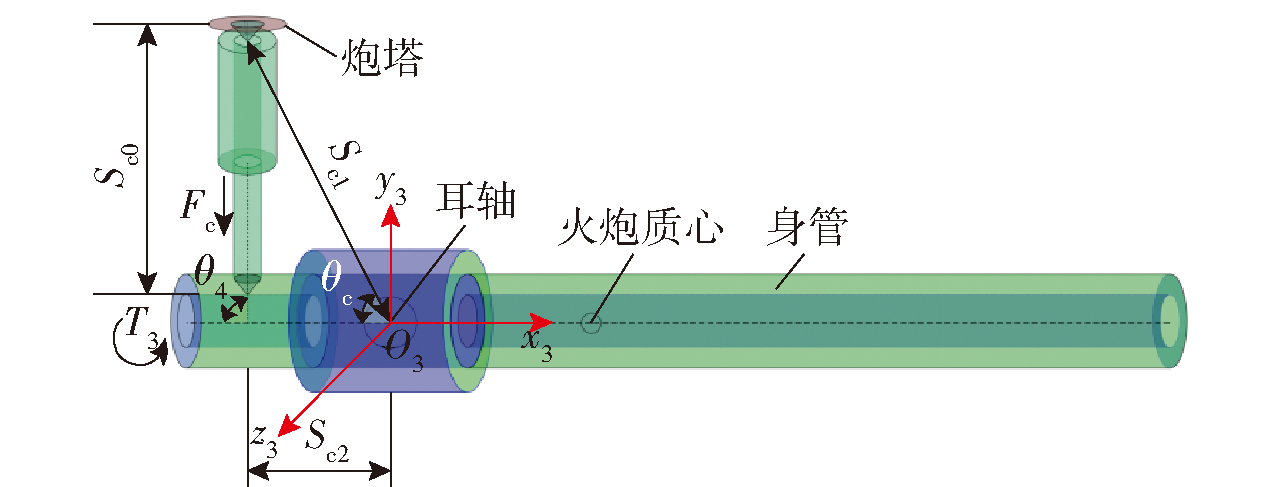
图3 高低向执行机构示意图
Fig.3 Schematic diagram of elevation drive mechanism
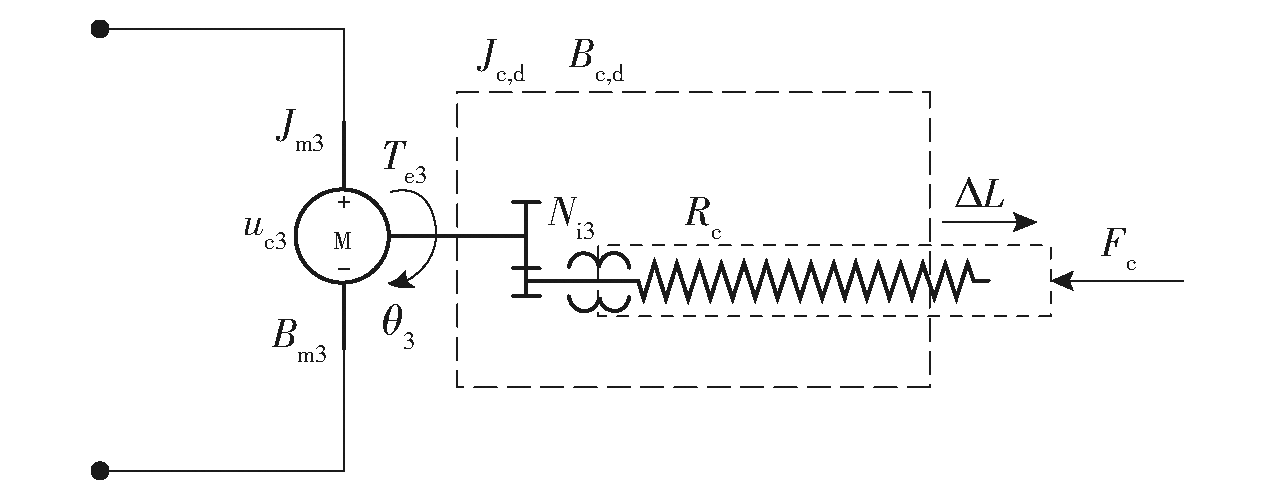
图4 高低向执行机构简化模型
Fig.4 Simplified model of elevation drive mechanism
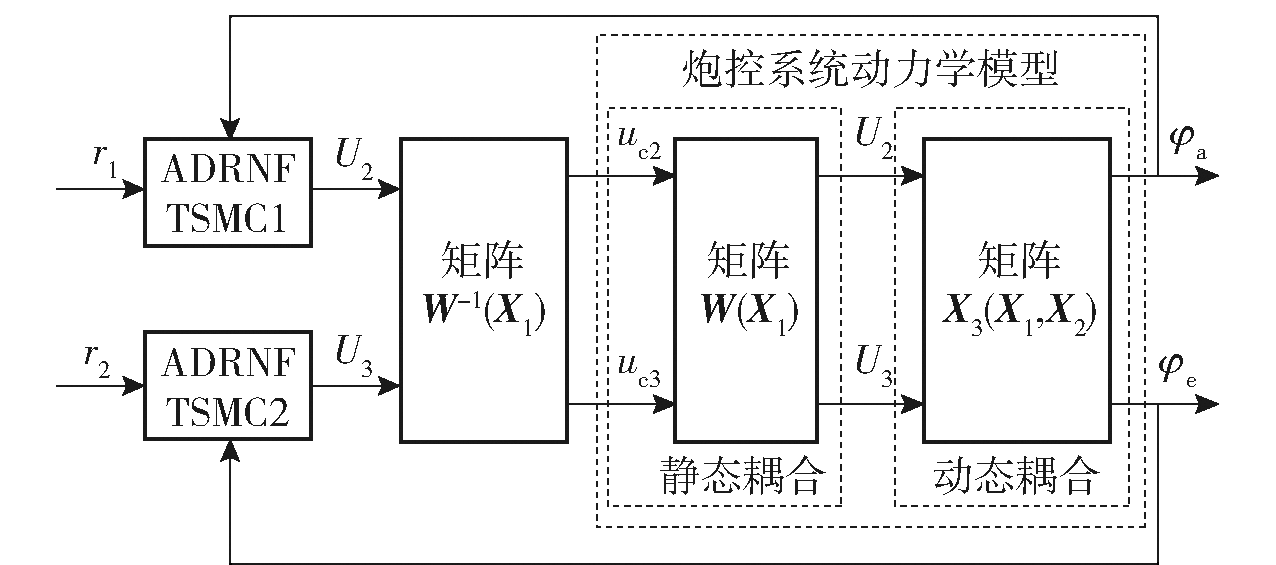
图5 坦克炮控系统解耦结构图
Fig.5 TGCS decoupling structure diagram
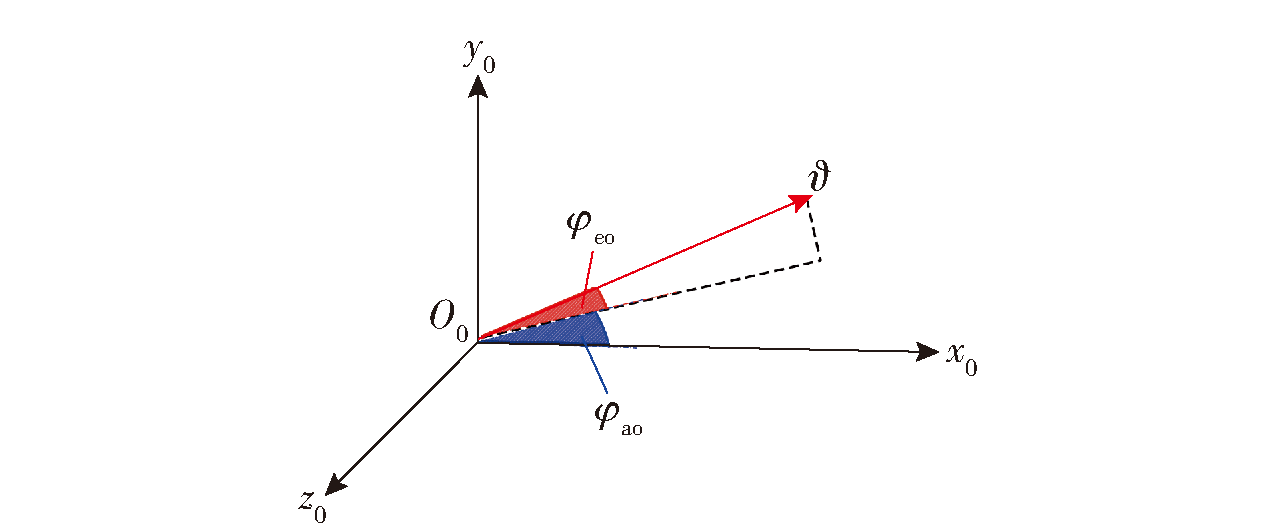
图6 火炮轴线在全局惯性坐标系中的方位示意图
Fig.6 Azimuth of gunaxis in global inertial coordinate system
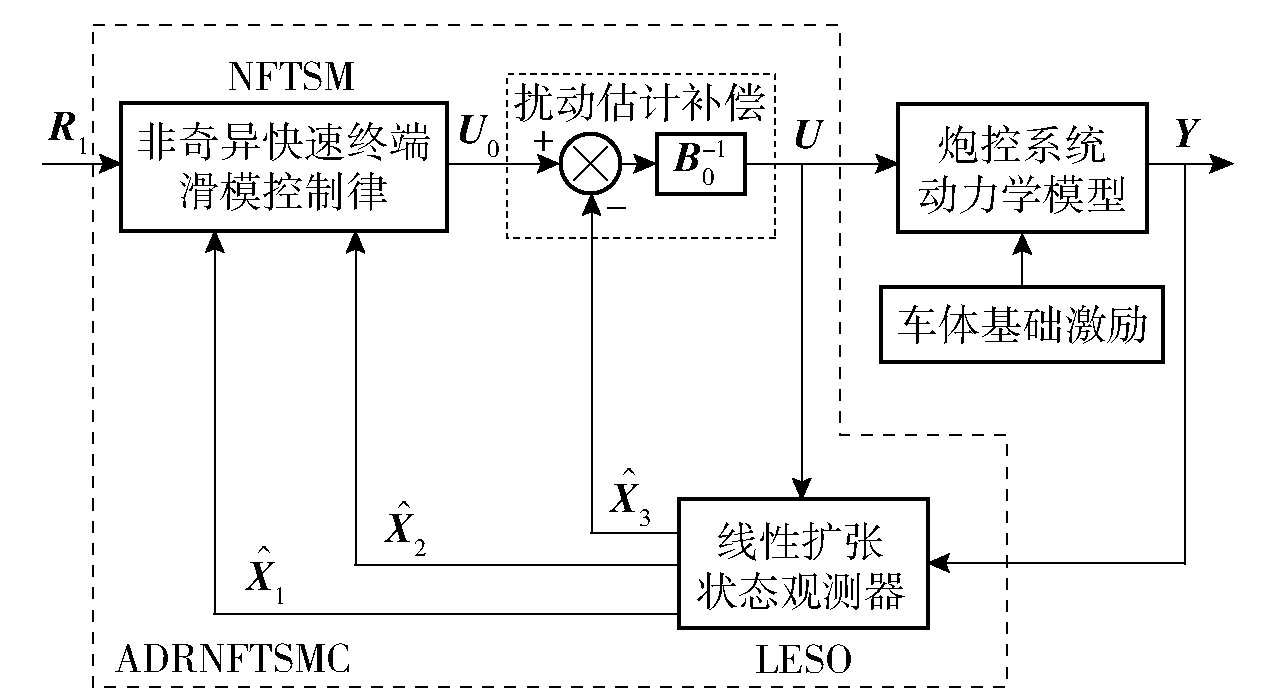
图7 坦克炮控制系统结构图
Fig.7 TGCS structure diagram
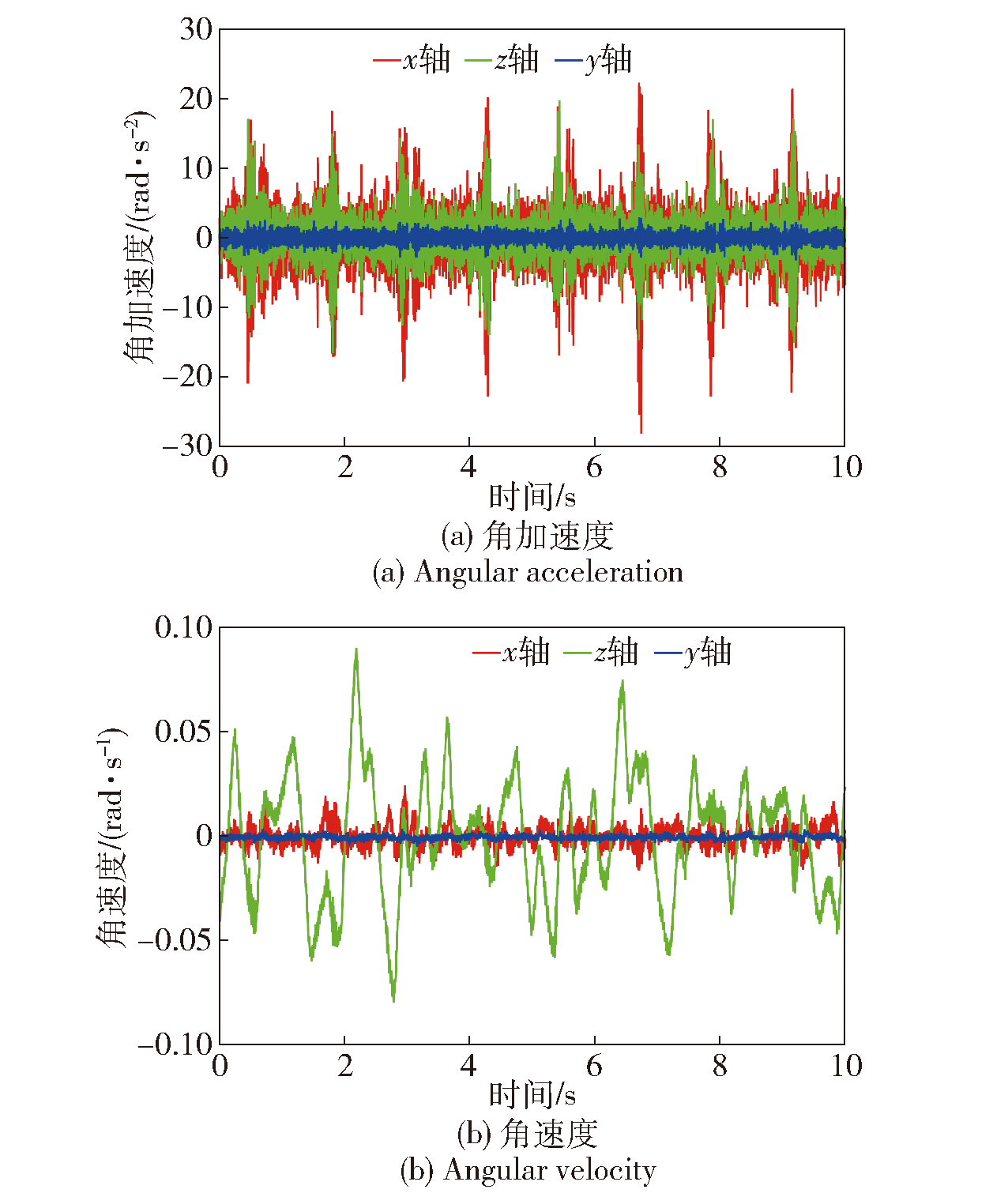
图8 20km/h速度行驶车体基础激励
Fig.8 Fundamental vehicular excitation while marching at a speed of 20km/h
| 统计值 | 坐标轴 | 车速/(km·h-1) | ||
|---|---|---|---|---|
| 20 | 25 | 30 | ||
| x | 3.0387 | 3.1277 | 3.2677 | |
| 角加速度/(rad·s-2) | z | 2.1688 | 2.3016 | 2.3042 |
| y | 0.5773 | 0.6177 | 0.7388 | |
| x | 0.0049 | 0.0051 | 0.0053 | |
| 角速度/(rad·s-1) | z | 0.0285 | 0.0360 | 0.0421 |
| y | 0.0011 | 0.0012 | 0.0014 | |
表1 D级路面不同车速车体基础激励均方根对比
Table 1 Comparison of the RMS fundamental vehicular excitations at different speeds on D-level road
| 统计值 | 坐标轴 | 车速/(km·h-1) | ||
|---|---|---|---|---|
| 20 | 25 | 30 | ||
| x | 3.0387 | 3.1277 | 3.2677 | |
| 角加速度/(rad·s-2) | z | 2.1688 | 2.3016 | 2.3042 |
| y | 0.5773 | 0.6177 | 0.7388 | |
| x | 0.0049 | 0.0051 | 0.0053 | |
| 角速度/(rad·s-1) | z | 0.0285 | 0.0360 | 0.0421 |
| y | 0.0011 | 0.0012 | 0.0014 | |
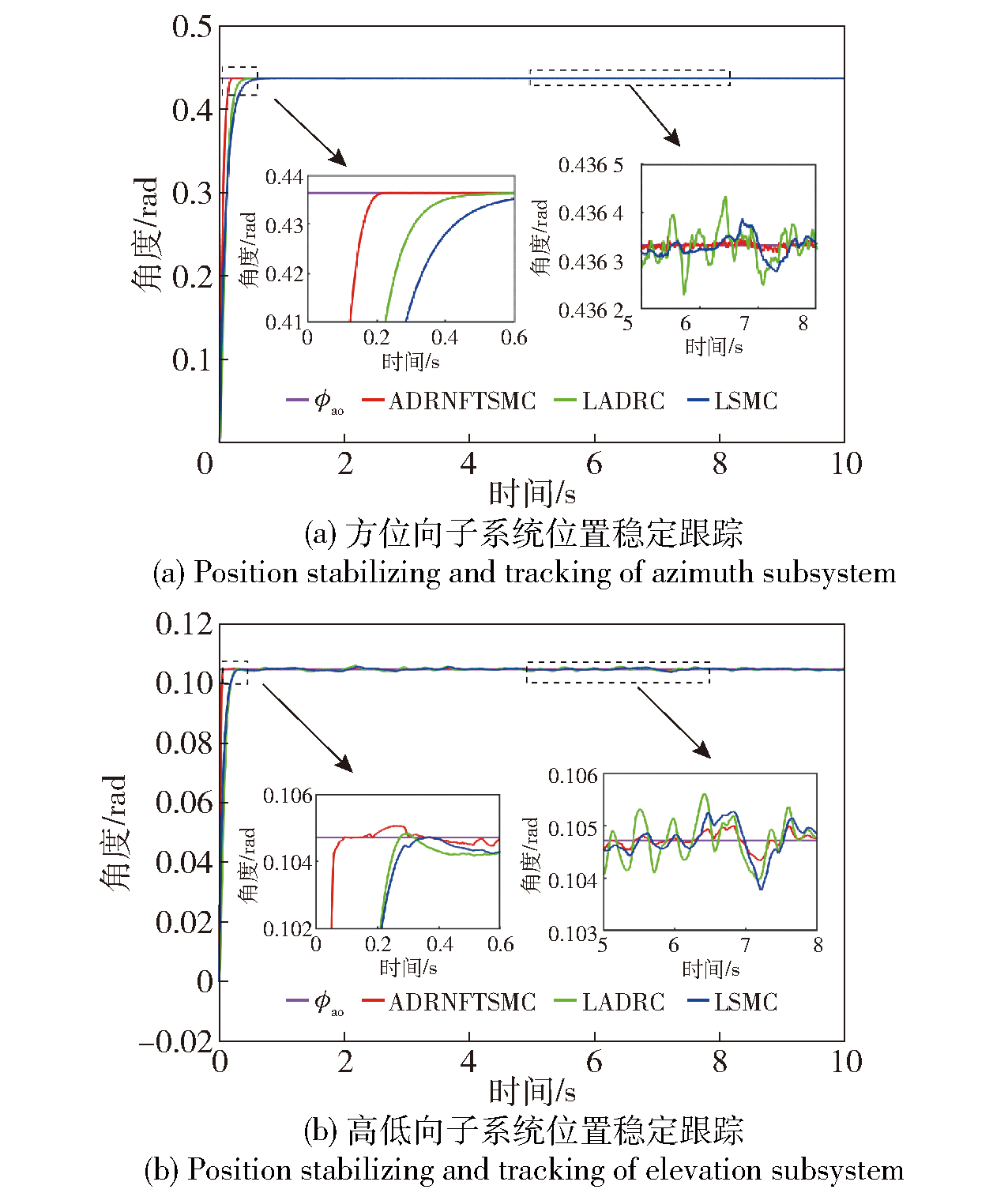
图9 工况1炮控系统位置稳定跟踪
Fig.9 Position stabilizing and tracking of TGCS in Case 1
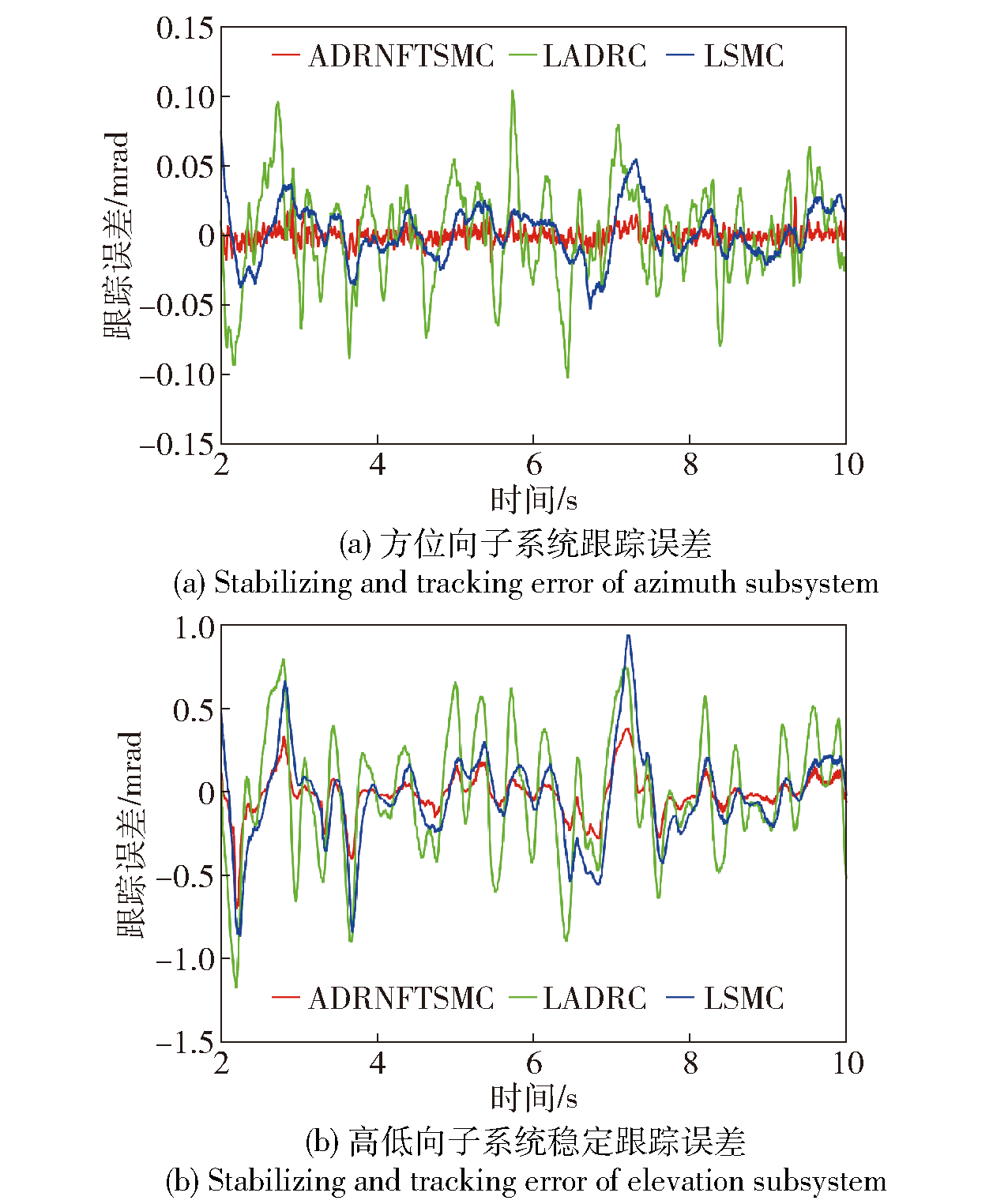
图10 工况1炮控系统稳定跟踪误差
Fig.10 Stabilizing and tracking error of TGCS in Case 1
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | LSMC | ||
| σ/mrad | 方位 | 0.0041 | 0.0279 | 0.0154 |
| 高低 | 0.0858 | 0.2969 | 0.1970 | |
| τ/s | 方位 | 0.2135 | 0.5760 | 0.8750 |
| 高低 | 0.0880 | 0.6470 | 0.7120 | |
表2 工况1系统仿真结果对比
Table 2 Comparison of the system simulation results in Case 1
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | LSMC | ||
| σ/mrad | 方位 | 0.0041 | 0.0279 | 0.0154 |
| 高低 | 0.0858 | 0.2969 | 0.1970 | |
| τ/s | 方位 | 0.2135 | 0.5760 | 0.8750 |
| 高低 | 0.0880 | 0.6470 | 0.7120 | |
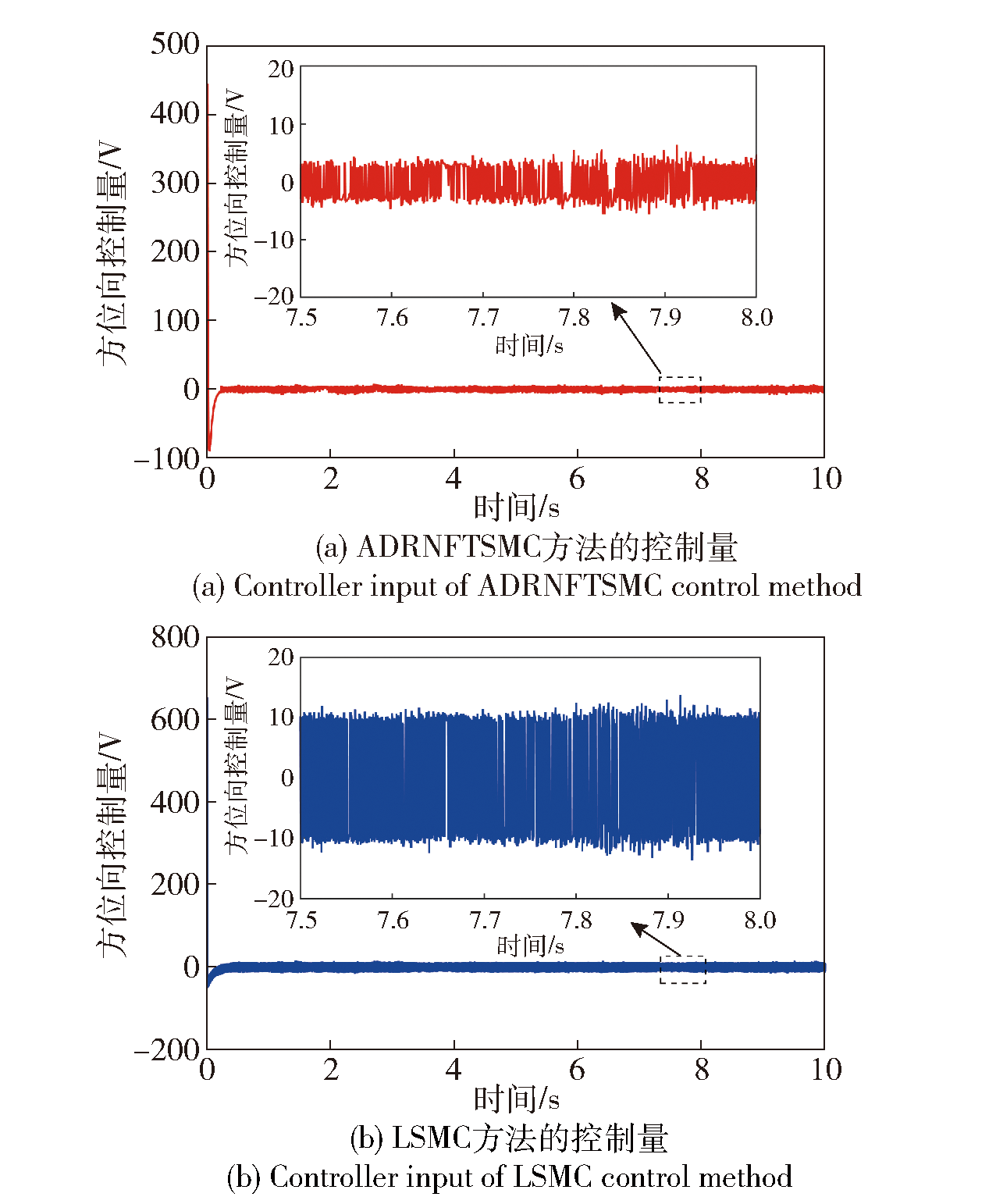
图11 工况1方位向子系统控制量对比
Fig.11 Controller input of azimuth subsystem in Case 1
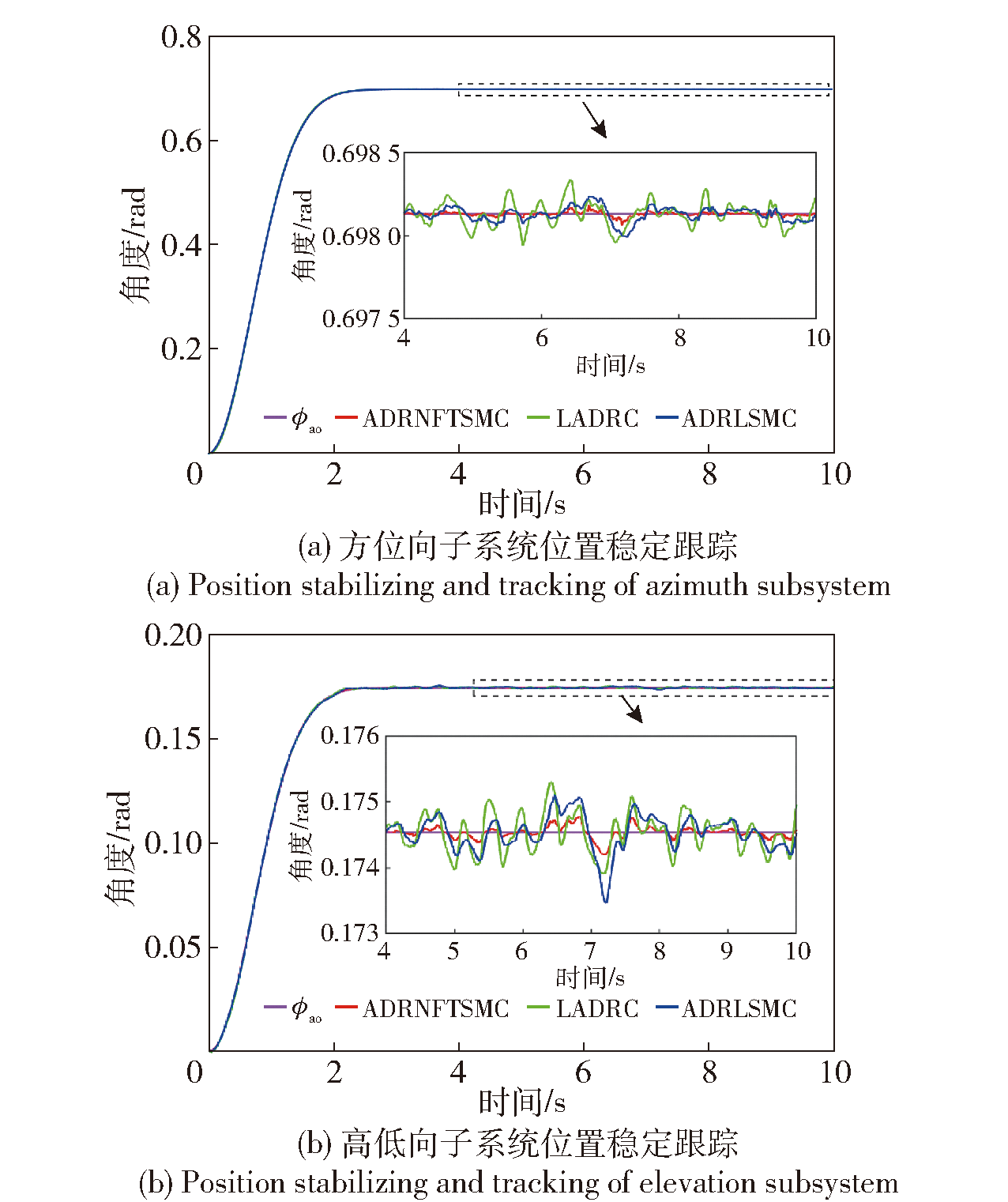
图12 工况2炮控系统位置稳定跟踪
Fig.12 Position stabilizing and tracking of TGCS in Case 2

图13 工况2炮控系统稳定跟踪误差
Fig.13 Stabilizing and tracking error of TGCS in Case 2
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| σ/mrad | 方位 | 0.0079 | 0.0563 | 0.0336 |
| 高低 | 0.0598 | 0.2333 | 0.2090 | |
| τ/s(t=5s) | 方位 | 5.2660 | 5.6070 | 5.6800 |
| τ/s(t=7s) | 7.2840 | 7.4750 | 7.5510 | |
| τ/s(t=7s) | 高低 | 7.1170 | 7.4150 | 7.1540 |
| τ/s(t=9s) | 9.2680 | 9.3320 | 9.3530 | |
表3 工况2系统仿真结果对比
Table 3 Comparison of the system simulation results in Case 2
| 统计值 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| σ/mrad | 方位 | 0.0079 | 0.0563 | 0.0336 |
| 高低 | 0.0598 | 0.2333 | 0.2090 | |
| τ/s(t=5s) | 方位 | 5.2660 | 5.6070 | 5.6800 |
| τ/s(t=7s) | 7.2840 | 7.4750 | 7.5510 | |
| τ/s(t=7s) | 高低 | 7.1170 | 7.4150 | 7.1540 |
| τ/s(t=9s) | 9.2680 | 9.3320 | 9.3530 | |
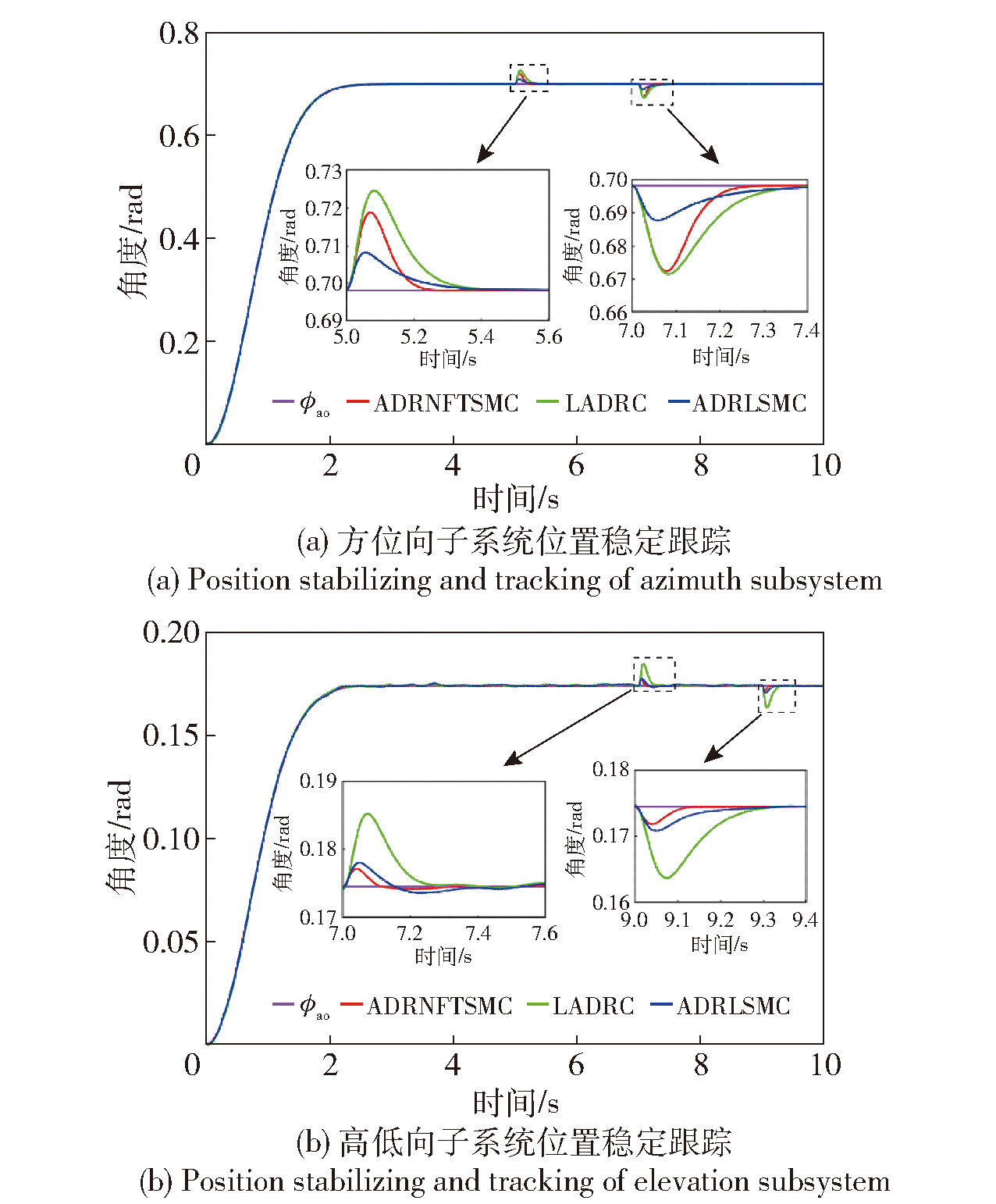
图14 工况2炮控系统位置稳定跟踪到位时间对比
Fig.14 Comparison of the arrival times for position stabilizing and tracking of TGCS in Case 2

图15 工况3车速25km/h炮控系统跟踪误差对比
Fig.15 Comparison of the tracking errors of TGCS at a speed of 25km/h in Case 3
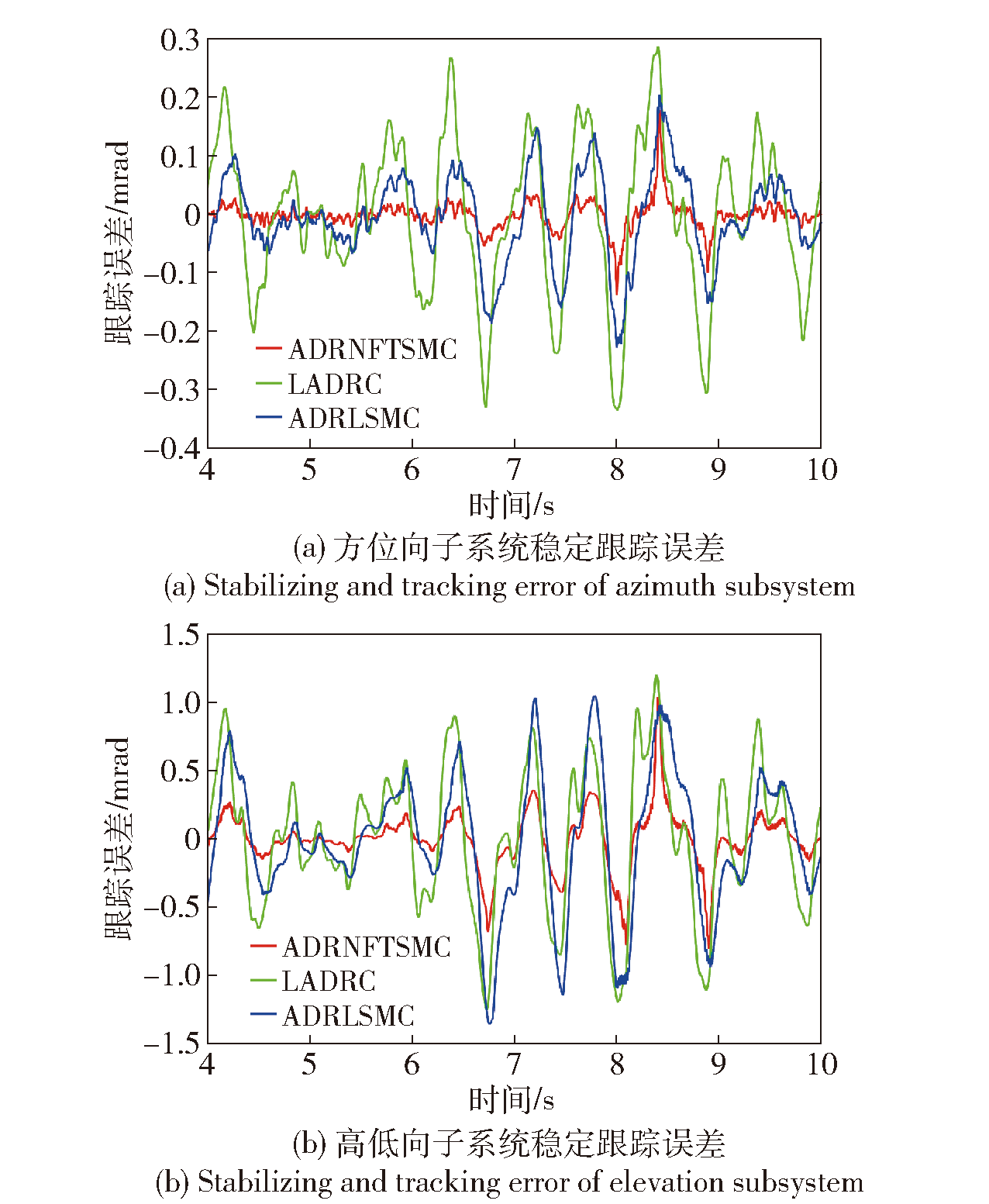
图16 工况3车速30km/h炮控系统跟踪误差对比
Fig.16 Comparison of the tracking errors of TGCS at a speed of 30km/h in Case 3
| 车速 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| 25km/h | 方位 | 0.0097 | 0.0742 | 0.0439 |
| 高低 | 0.0938 | 0.3126 | 0.2879 | |
| 30km/h | 方位 | 0.0149 | 0.1043 | 0.0595 |
| 高低 | 0.1397 | 0.4207 | 0.3879 | |
表4 工况3系统后6s稳定跟踪误差对比
Table 4 Comparison of stabilizing and tracking errors of the system after 6 seconds in Case 3 mrad
| 车速 | 方向 | 控制器 | ||
|---|---|---|---|---|
| ADRNFTSMC | LADRC | ADRLSMC | ||
| 25km/h | 方位 | 0.0097 | 0.0742 | 0.0439 |
| 高低 | 0.0938 | 0.3126 | 0.2879 | |
| 30km/h | 方位 | 0.0149 | 0.1043 | 0.0595 |
| 高低 | 0.1397 | 0.4207 | 0.3879 | |
| [1] |
常天庆, 王钦钊, 张雷, 等. 装甲车辆火控系统[M]. 北京: 北京理工大学出版社, 2020.
|
|
|
|
| [2] |
臧克茂, 马晓军, 李长兵. 现代坦克炮控系统[M]. 北京: 国防工业出版社, 2007.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
王一珉, 杨国来, 王丽群. 坦克炮控系统RBF神经网络自适应鲁棒控制方法研究[J]. 振动与冲击, 2022, 41(24):72-78.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
胡继辉, 侯远龙, 高强, 等. 坦克炮控系统神经网络自适应滑模控制方法[J]. 火力与指挥控制, 2018, 43(6): 118-121,126.
|
|
|
|
| [11] |
|
| [12] |
袁东, 马晓军, 魏曙光, 等. 坦克炮控系统直传式驱动及其死区补偿控制[J]. 电机与控制学报, 2016, 20(5): 111-118.
|
|
|
|
| [13] |
|
| [14] |
田建辉, 钱林方, 徐亚栋, 等. 火力线跟踪与瞄准的任务空间控制方法[J]. 南京理工大学学报(自然科学版), 2011, 35(4): 489-493.
|
|
|
|
| [15] |
袁树森, 邓文翔, 姚建勇, 等. 基于Mworks的坦克随动系统建模与仿真研究[J]. 弹道学报, 2021, 33(1): 35-43.
doi: 10.12115/j.issn.1004-499X(2021)01-006 |
|
doi: 10.12115/j.issn.1004-499X(2021)01-006 |
|
| [16] |
韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [17] |
|
| [18] |
李世华, 王翔宇, 丁世宏, 等. 滑模控制理论与应用研究[M]. 北京: 科学出版社, 2022.
|
|
|
|
| [19] |
|
| [20] |
王超. 坦克行进间非线性动力学建模与主动稳定控制研究[D]. 南京: 南京理工大学, 2021.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1016/j.isatra.2024.01.005 pmid: 38220544 |
| [23] |
赵新运, 于剑桥. 新型迅捷弹箭动力学建模与姿态控制[J]. 兵工学报, 2024, 45(7):2182-2196.
doi: 10.12382/bgxb.2023.0404 |
|
doi: 10.12382/bgxb.2023.0404 |
|
| [24] |
|
| [25] |
高雨轩, 侯远龙, 高强, 等. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4):1071-1085.
|
|
doi: 10.12382/bgxb.2022.0890 |
|
| [26] |
|
| [27] |
|
| [28] |
马晓军, 袁东, 魏曙光. 坦克武器电力传动控制原理与应用[M]. 北京: 国防工业出版社, 2023.
|
|
|
|
| [29] |
|
| [30] |
郑颖. 某集束火箭炮位置伺服系统自抗扰方法研究[D]. 南京: 南京理工大学, 2015.
|
|
|
|
| [31] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7): 1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [32] |
|
| [1] | 江腾耀, 李伟, 雷昱, 胡鑫, 王伟伟. 自行高炮稳定跟踪系统建模与谐振抑制方法[J]. 兵工学报, 2024, 45(9): 3029-3043. |
| [2] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [3] | 刘进容, 李伟. SERF原子自旋陀螺仪中的碱金属气室无磁加热高精度温度控制[J]. 兵工学报, 2024, 45(9): 3288-3296. |
| [4] | 林瑜斌, 侯保林, 鲍丹, 赵伟. 基于隐式Lyapunov函数的弹药传输机械臂变增益超螺旋滑模控制[J]. 兵工学报, 2024, 45(8): 2573-2583. |
| [5] | 赵新运, 于剑桥. 新型迅捷弹箭动力学建模与姿态控制[J]. 兵工学报, 2024, 45(7): 2182-2196. |
| [6] | 朱威霖, 姚建勇, 刘家辉, 黎兰, 张佳林. 泵控多连杆式起竖系统自抗扰力同步控制[J]. 兵工学报, 2024, 45(6): 1906-1920. |
| [7] | 林忠麟, 王海涛, 刘文超, 甘锦裕, 张天宏, 黄峰. 基于多模式加速及反步滑模的航空发动机压气机压力模拟方法[J]. 兵工学报, 2024, 45(6): 1776-1786. |
| [8] | 吴锐, 于会龙, 董昊天, 席军强. 履带式特种车辆精细化动力学建模与仿真[J]. 兵工学报, 2024, 45(5): 1384-1401. |
| [9] | 韦巧玲, 杜雨欣, 周超, 王芳. 非最小相位高超声速飞行器非奇异滑模控制[J]. 兵工学报, 2024, 45(11): 3949-3958. |
| [10] | 田晔, 陈光宋, 刘太素. 火炮装填系统协调输弹机构磨损特性[J]. 兵工学报, 2024, 45(11): 4062-4070. |
| [11] | 周浩, 暴小鹏, 张洪刚. 无人机自抗扰控制的调相补偿改进设计与抑扰实现[J]. 兵工学报, 2024, 45(10): 3619-3630. |
| [12] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [13] | 王治霖, 王江, 祁琪, 范世鹏. 基于LESO的新型自适应鲁棒滚转通道控制算法[J]. 兵工学报, 2023, 44(7): 1920-1929. |
| [14] | 马悦萌, 王琳玮, 邵春涛, 周荻, 王永海. 襟翼控制的欠驱动飞行器自抗扰/鲁棒控制系统设计[J]. 兵工学报, 2023, 44(5): 1251-1266. |
| [15] | 高雨轩, 侯远龙, 高强, 侯润民. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4): 1071-1085. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4