
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (5): 1251-1266.doi: 10.12382/bgxb.2022.0035
马悦萌1, 王琳玮1, 邵春涛2, 周荻1,*( ), 王永海3
), 王永海3
收稿日期:2022-01-10
上线日期:2022-07-10
通讯作者:
基金资助:
MA Yuemeng1, WANG Linwei1, SHAO Chuntao2, ZHOU Di1,*(), WANG Yonghai3
Received:2022-01-10
Online:2022-07-10
摘要:
针对含不稳定内动态的襟翼控制欠驱动高超声速飞行器现有控制策略普遍存在的机动性能不足、工程应用困难等问题,设计欠驱动飞行器的自抗扰/鲁棒控制系统。提出一种基于通道级联的欠驱动控制策略,令偏航通道作为滚转通道的内回路,利用±1.5°的侧滑角合法波动范围,提升滚转角的指令跟踪速度。结合自抗扰与鲁棒控制理论设计自动驾驶仪,该自动驾驶仪不仅适用于过载反馈/欠驱动的非最小相位对象,还在摆脱自抗扰系统对关键模型参数依赖的同时减小了鲁棒控制器的降阶难度,有广阔的工程应用前景。为验证方案有效性,以参数存在±20%随机摄动的欠驱动高超声速飞行器模型为对象进行了1000次蒙特卡洛仿真,结果表明新的欠驱动策略能够在保证侧滑角不越界的同时提高滚转通道的响应速度,自抗扰/鲁棒控制系统在面对模型摄动与复合干扰时均有较好的鲁棒性。
马悦萌, 王琳玮, 邵春涛, 周荻, 王永海. 襟翼控制的欠驱动飞行器自抗扰/鲁棒控制系统设计[J]. 兵工学报, 2023, 44(5): 1251-1266.
MA Yuemeng, WANG Linwei, SHAO Chuntao, ZHOU Di, WANG Yonghai. Active-Disturbance-Rejection/Robust Attitude Control System Design of Underactuated Vehicle Based on Flap Control[J]. Acta Armamentarii, 2023, 44(5): 1251-1266.

图1 级联欠驱动策略系统示意图
Fig.1 Diagram of cascade underactuated strategy system

图2 俯仰通道控制系统设计图
Fig.2 Block diagram of pitch channel control system design

图3 俯仰通道内回路降阶示意图
Fig.3 Diagram of order reduction of inner loop controller in pitch channel

图4 俯仰通道内回路闭环系统阶跃响应
Fig.4 Step response of closed-loop system of inner loop controller in pitch channel

图5 俯仰通道内回路闭环系统奇异值
Fig.5 Singular value of closed-loop system of inner loop controller in pitch channel

图6 内回路闭环等效系统bode图
Fig.6 Bode diagram of equivalent closed-loop system of inner loop controller

图7 内回路闭环等效系统零极点图
Fig.7 Zero pole diagram of equivalent closed-loop system of inner loop controller

图8 俯仰通道外回路降阶示意图
Fig.8 Diagram of order reduction of outer loop controller in pitch channel

图9 俯仰通道外回路闭环系统阶跃响应
Fig.9 Step response of closed-loop system of external loop in pitch channel

图10 俯仰通道外回路闭环系统奇异值
Fig.10 Singular value of closed-loop system of external loop in pitch channel

图11 滚转-偏航通道控制系统框图
Fig.11 Block diagram of roll-yaw channel control system design

图12 偏航通道闭环等效系统bode图
Fig.12 Bode diagram of equivalent closed-loop system in yaw channel

图13 偏航通道闭环等效系统零极点图
Fig.13 Zero-pole diagram of equivalent closed-loop system in yaw channel

图14 滚转通道鲁棒控制器降阶示意图
Fig.14 Diagram of order reduction of robust controller in roll channel

图15 滚转通道闭环系统阶跃响应
Fig.15 Step response of closed-loop system in roll channel

图16 滚转通道闭环系统奇异值
Fig.16 Singular value of closed loop system in roll channel
| a1 | a2 | a3 | a4 | a5 | a6 |
|---|---|---|---|---|---|
| 0 | 149.1 | 143.6 | 1.656 | 0.168 | 0.933 |
表1 俯仰通道气动参数
Table 1 Aerodynamic parameters of pitch channel
| a1 | a2 | a3 | a4 | a5 | a6 |
|---|---|---|---|---|---|
| 0 | 149.1 | 143.6 | 1.656 | 0.168 | 0.933 |
| b1 | b2 | b4 | b6 | b7 |
|---|---|---|---|---|
| 18.30 | 152.8 | 0.648 | -0.933 | 3 |
表2 偏航通道气动参数
Table 2 Aerodynamic parameters of yaw channel
| b1 | b2 | b4 | b6 | b7 |
|---|---|---|---|---|
| 18.30 | 152.8 | 0.648 | -0.933 | 3 |
| c1 | c2 | c3 | c4 |
|---|---|---|---|
| 1.0982 | -10 | 0. 849 | 0 |
表3 滚转通道气动参数
Table 3 Aerodynamic parameters of roll channel
| c1 | c2 | c3 | c4 |
|---|---|---|---|
| 1.0982 | -10 | 0. 849 | 0 |
| 参数位置 | 名称 | 数值 |
|---|---|---|
| β1 | 100 | |
| NESO1(俯仰通道) | β2 | 10000 |
| δ1 | 0.01 | |
| μ1 | 0.5 | |
| β1 | 100 | |
| NESO2(俯仰通道) | β2 | 10000 |
| δ2 | 0.01 | |
| μ2 | 0.5 |
表4 俯仰通道控制系统仿真参数
Table 4 Controller parameters of pitch channel
| 参数位置 | 名称 | 数值 |
|---|---|---|
| β1 | 100 | |
| NESO1(俯仰通道) | β2 | 10000 |
| δ1 | 0.01 | |
| μ1 | 0.5 | |
| β1 | 100 | |
| NESO2(俯仰通道) | β2 | 10000 |
| δ2 | 0.01 | |
| μ2 | 0.5 |
| 参数位置 | 名称 | 数值 |
|---|---|---|
| NESO1 (滚转与偏航通道) | β1 | 100 |
| β2 | 100 | |
| β3 | 10000 | |
| δ3 | 0.01 | |
| μ3 | 0.5 | |
| NESO2 (滚转与偏航通道) | β1 | 1000 |
| β2 | 10000 | |
| δ4 | 0.01 | |
| μ4 | 0.5 | |
| NESO3 (滚转与偏航通道) | β1 | 100 |
| β2 | 10000 | |
| δ5 | 0.01 | |
| μ5 | 0.5 |
表5 滚转-偏航通道控制系统仿真参数
Table 5 Controller parameters of roll-yaw channel
| 参数位置 | 名称 | 数值 |
|---|---|---|
| NESO1 (滚转与偏航通道) | β1 | 100 |
| β2 | 100 | |
| β3 | 10000 | |
| δ3 | 0.01 | |
| μ3 | 0.5 | |
| NESO2 (滚转与偏航通道) | β1 | 1000 |
| β2 | 10000 | |
| δ4 | 0.01 | |
| μ4 | 0.5 | |
| NESO3 (滚转与偏航通道) | β1 | 100 |
| β2 | 10000 | |
| δ5 | 0.01 | |
| μ5 | 0.5 |

图17 滚转角响应曲线
Fig.17 Roll angle response curve

图18 侧滑角响应曲线
Fig.18 Sideslip angle response curve

图19 纵向过载响应曲线
Fig.19 Longitudinal overload response curve

图20 副翼偏角响应曲线
Fig.20 Aileron deflection angle response curve

图21 升降舵偏角响应曲线
Fig.21 Elevator angle response curve

图22 标称系统滚转-偏航通道复合扰动观测结果
Fig.22 Observation results of compound disturbance in roll-yaw channel of nominal system
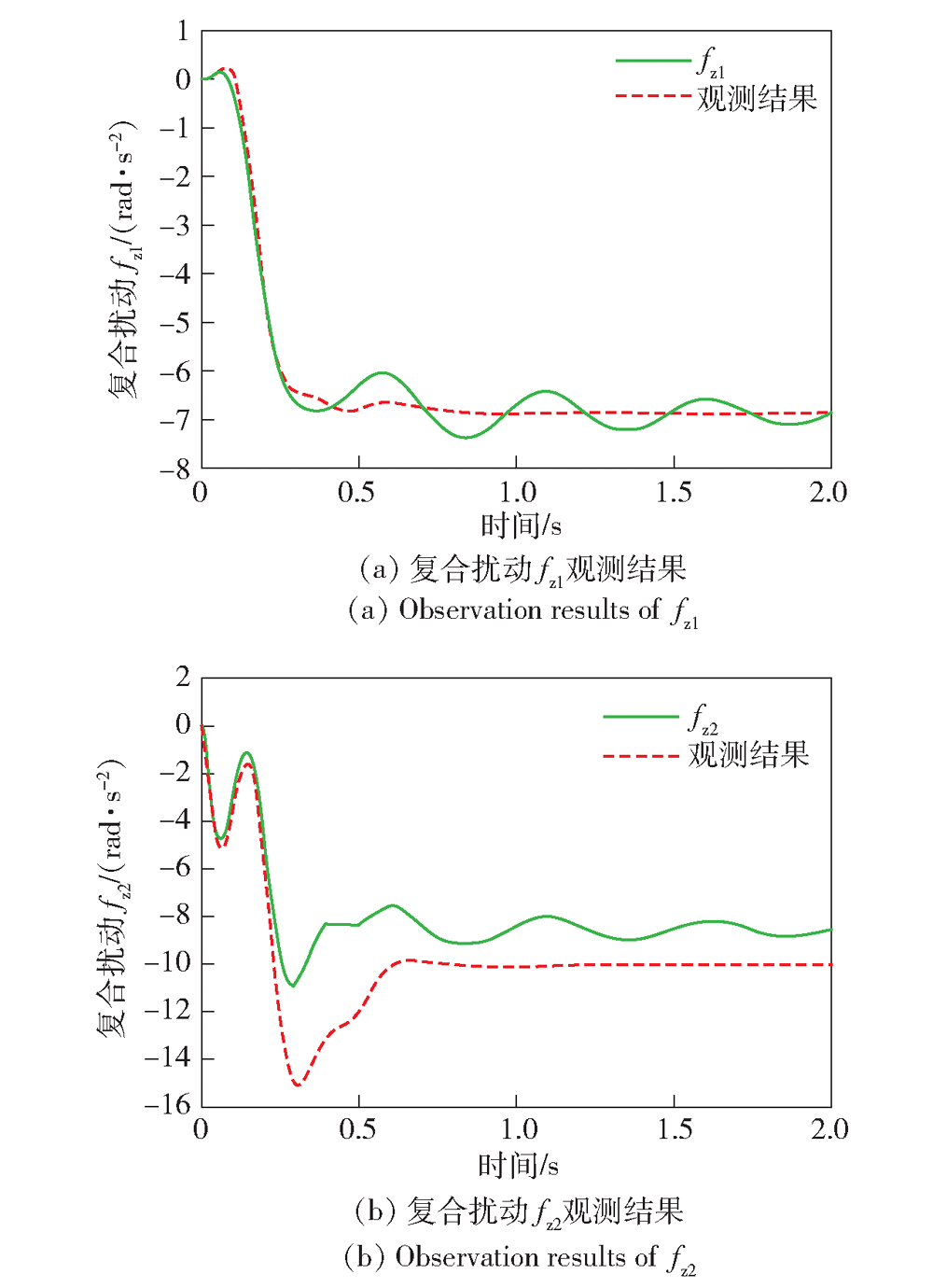
图23 标称系统俯仰通道复合扰动观测结果
Fig.23 Observation results of compound disturbance in pitch channel of nominal system
| [1] |
赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展[J]. 宇航学报, 2020, 41(10):1239-1250.
|
|
|
|
| [2] |
邓帆, 任怀宇, 李绪国, 等. 采用不同气动控制舵面的临近空间高超声速滑翔飞行器舵效研究[J]. 空气动力学学报, 2014, 32(2):240-245.
|
|
|
|
| [3] |
|
| [4] |
王靓玥, 郭延宁, 马广富, 等. 航天器姿态控制输入饱和问题综述[J]. 宇航学报, 2021, 42(1):11-21.
|
|
|
|
| [5] |
|
| [6] |
doi: 10.1016/j.ast.2021.106854 URL |
| [7] |
史丽楠, 李惠峰, 张冉. 滑翔再入飞行器横侧向耦合姿态控制策略[J]. 北京航空航天大学学报, 2016, 42(1):120-129.
|
|
|
|
| [8] |
doi: 10.1016/j.automatica.2012.04.006 URL |
| [9] |
doi: 10.1109/TIE.2017.2760246 URL |
| [10] |
|
| [11] |
doi: 10.1007/s11071-017-4041-9 |
| [12] |
孙向宇, 晁涛, 王松艳, 等. 考虑通道耦合因素的制导控制一体化设计方法[J]. 宇航学报, 2016, 37(8):936-945.
|
|
|
|
| [13] |
谭诗利, 雷虎民, 王鹏飞. 应用跟踪微分器的高超声速飞行器的反演控制[J]. 宇航学报, 2019, 40(6):673-683.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
doi: 10.1109/TNNLS.2016.2516948 URL |
| [17] |
牛毅可. 高超声速飞行器横侧向欠驱动控制技术研究[D]. 南京: 南京航空航天大学, 2017.
|
|
|
|
| [18] |
周荻, 董金鲁. 带襟翼的飞行器非线性控制系统分析和设计[J]. 兵工学报, 2017, 38(7):77-84.
|
|
|
|
| [19] |
赵志良. 自抗扰控制设计与理论分析[M]. 北京: 科学出版社, 2019:180-184.
|
|
|
|
| [20] |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1):19-23.
|
|
|
|
| [21] |
doi: 10.1109/TIE.2012.2232254 URL |
| [22] |
王洋, 周军. 基于干扰补偿的BTT导弹自动驾驶仪抗尖峰滑模控制器设计[J]. 控制与决策, 2018, 33(6): 1062-1068.
|
|
|
|
| [23] |
|
| [1] | 王治霖, 王江, 祁琪, 范世鹏. 基于LESO的新型自适应鲁棒滚转通道控制算法[J]. 兵工学报, 2023, 44(7): 1920-1929. |
| [2] | 高铁锁, 江涛, 傅杨奥骁, 丁明松, 刘庆宗, 董维中, 许勇, 李鹏. 不同尺度飞行器周围等离子体分布及电磁波传输效应[J]. 兵工学报, 2023, 44(6): 1809-1819. |
| [3] | 高雨轩, 侯远龙, 高强, 侯润民. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4): 1071-1085. |
| [4] | 孙昊, 孙青林, 孙明玮, 陈增强. 随机初值条件下基于翼伞的无人机回收方法[J]. 兵工学报, 2023, 44(3): 718-727. |
| [5] | 董金鲁, 马悦萌, 周荻, 龚晓刚, 张曦, 宋加洪. 临近空间高超声速飞行器的直接力与襟翼复合滑模控制[J]. 兵工学报, 2023, 44(2): 496-506. |
| [6] | 王琛, 田振国, 沈振兴. 等离子体环境下高超声速飞行器的流-固耦合机制[J]. 兵工学报, 2023, 44(10): 3038-3046. |
| [7] | 袁树森, 邓文翔, 姚建勇, 杨国来. 全电坦克双向稳定系统自适应积分鲁棒控制[J]. 兵工学报, 2023, 44(1): 140-155. |
| [8] | 杨春伟, 刘炳琪, 王继平, 邵节, 韩治国. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(S2): 78-86. |
| [9] | 宋金超, 赵良玉. 自旋火箭弹横滚隔离系统的自抗扰控制[J]. 兵工学报, 2022, 43(7): 1510-1518. |
| [10] | 赵春明, 焦胜海, 王晓飞, 姚跃民, 黄朝东. 柔性充气空间飞行器姿态控制系统设计[J]. 兵工学报, 2022, 43(6): 1346-1354. |
| [11] | 张文清, 邹佳运, 张小川, 韩梅, 邹司宸. 具有全向控制的水下碟形滑翔机自抗扰控制[J]. 兵工学报, 2022, 43(3): 626-636. |
| [12] | 张晚晴, 余文斌, 李静琳, 陈万春. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7): 1400-1411. |
| [13] | 于哲峰, 胥建宇, 罗跃, 杨鹰, 刘进博, 兰京川. 高超声速飞行器烧蚀后退量时序提取及基于神经网络的预测[J]. 兵工学报, 2021, 42(6): 1230-1237. |
| [14] | 岳彬, 马文, 呼卫军. 高超声速飞行器的自适应容错控制[J]. 兵工学报, 2021, 42(3): 521-529. |
| [15] | 蔺君, 何英姿, 黄盘兴. 带推力高超声速飞行器非连续点火再入轨迹研究[J]. 兵工学报, 2020, 41(7): 1307-1316. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4