
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (1): 165-175.doi: 10.12382/bgxb.2022.0811
所属专题: 特种车辆理论与技术
陈渐伟, 于传强*( ), 刘志浩, 唐圣金(), 张志浩, 舒洪斌
), 刘志浩, 唐圣金(), 张志浩, 舒洪斌
收稿日期:2022-09-13
上线日期:2022-12-27
通讯作者:
作者简介:唐圣金(1985—),男,副教授,博士生导师。E-mail: tangshengjin27@126.com;
基金资助:
CHEN Jianwei, YU Chuanqiang*(), LIU Zhihao, TANG Shengjin(), ZHANG Zhihao, SHU Hongbin
Received:2022-09-13
Online:2022-12-27
摘要:
多轴特种车辆的动力学模型具有强非线性,精细化的物理建模需要准确的模型参数和动力学方程以映射车辆动力学的特性。在无精确的车辆先验物理参数信息和动力学函数关系条件下,为提高车辆动力学建模的保真度,针对某型五轴特种车辆的横向动力学行为,提出了一种基于神经网络的数据建模方法。网络框架主体呈闭环结构,网络输出的状态信息同时作为输入用于预测下一时刻的状态,实现了数据建模递归更新;针对闭环网络模型,设计了闭环结构的训练策略, 在网络模型中引入中间变量,使得网络在训练阶段仍然保持闭环结构;网络模块采用循环门控单元(Gate Recurrent Unit)和全连接网络(Full Neural Networks)的组合方式;数据集由经过实车验证的Trucksim仿真模型生成,分析结果表明:在无精确车辆先验信息条件下,物理建模难以准确预测出车辆的状态信息,数据模型具有更好的保真度。闭环训练方法可以使得闭环结构的网络具有更好的保真度,对于横向速度和横摆角速度预测的最大绝对值误差仅为0.079km/h和0.342°/s,相比于开环训练的结果,最大误差降低了58.40%和49.48%。
中图分类号:
陈渐伟, 于传强, 刘志浩, 唐圣金, 张志浩, 舒洪斌. 多轴特种车辆的数据建模方法及横向动力学应用[J]. 兵工学报, 2023, 44(1): 165-175.
CHEN Jianwei, YU Chuanqiang, LIU Zhihao, TANG Shengjin, ZHANG Zhihao, SHU Hongbin. Data Modeling of Multi-Axle Special Vehicles and Lateral Dynamics Applications[J]. Acta Armamentarii, 2023, 44(1): 165-175.

图1 单轨模型
Fig.1 Single track model
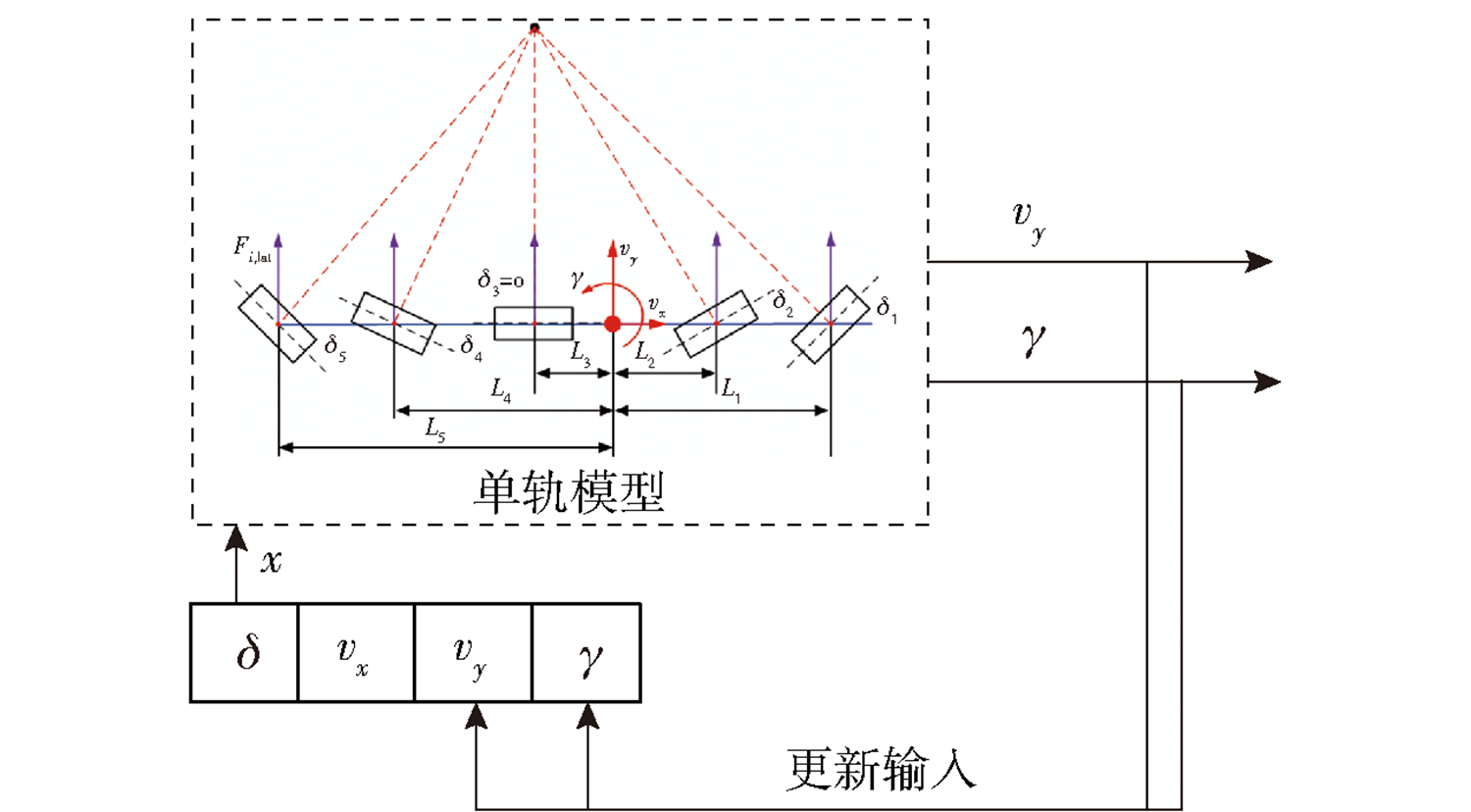
图2 物理模型更新过程
Fig.2 Update process of the physical model
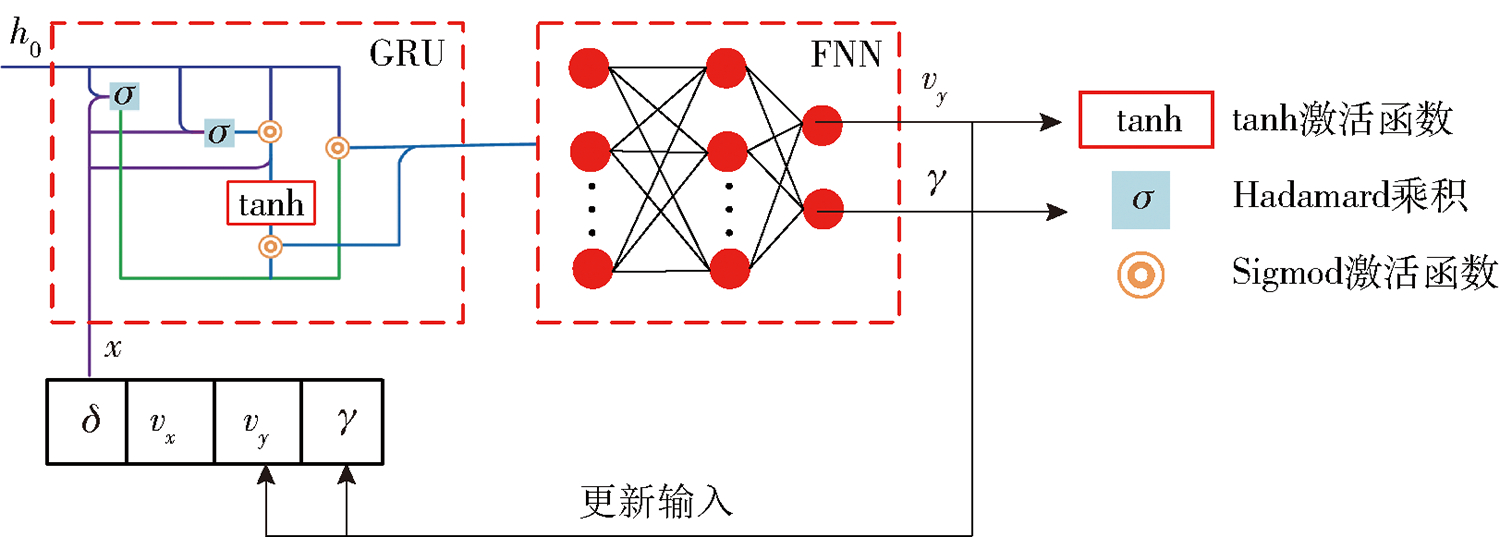
图3 闭环网络模型
Fig.3 Closed-loop network model
| 超参数 | 数值 |
|---|---|
| GRU层数 | 1 |
| 输出层维度 | 150 |
| 输入序列长度 | 1 |
表1 GRU模块参数
Table 1 GRU module parameters
| 超参数 | 数值 |
|---|---|
| GRU层数 | 1 |
| 输出层维度 | 150 |
| 输入序列长度 | 1 |
| 超参数 | 数值 |
|---|---|
| FNN层数 | 2 |
| 第1层维度 | 150×150 |
| 第1层激活函数 | Tanh激活函数 |
| 第2层维度 | 150×2 |
| 第2层激活函数 | 无 |
表2 FNN模块参数
Table 2 FNN module parameters
| 超参数 | 数值 |
|---|---|
| FNN层数 | 2 |
| 第1层维度 | 150×150 |
| 第1层激活函数 | Tanh激活函数 |
| 第2层维度 | 150×2 |
| 第2层激活函数 | 无 |
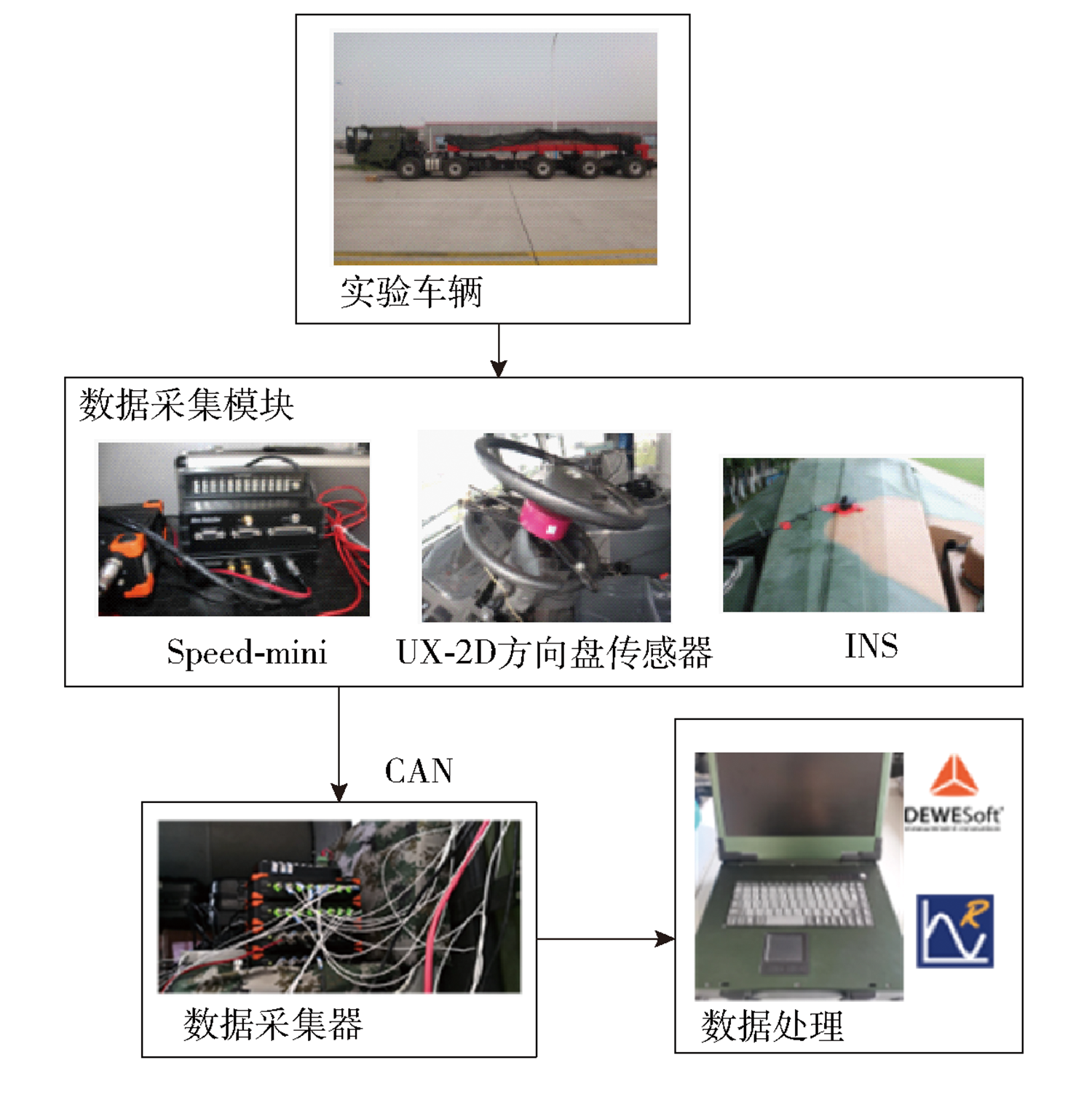
图4 实验平台
Fig.4 Experimental platform
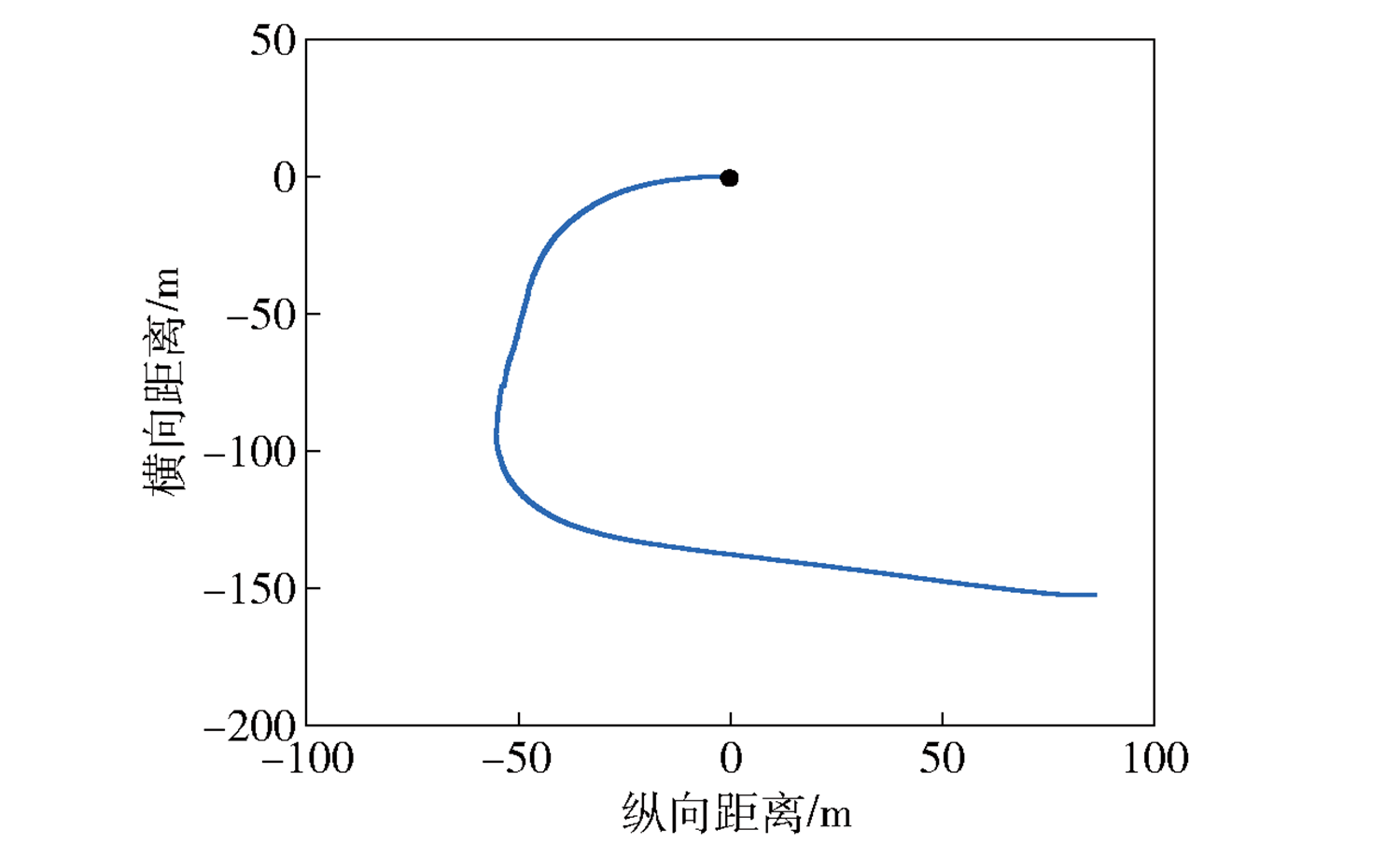
图5 实验路径
Fig.5 Experimental path
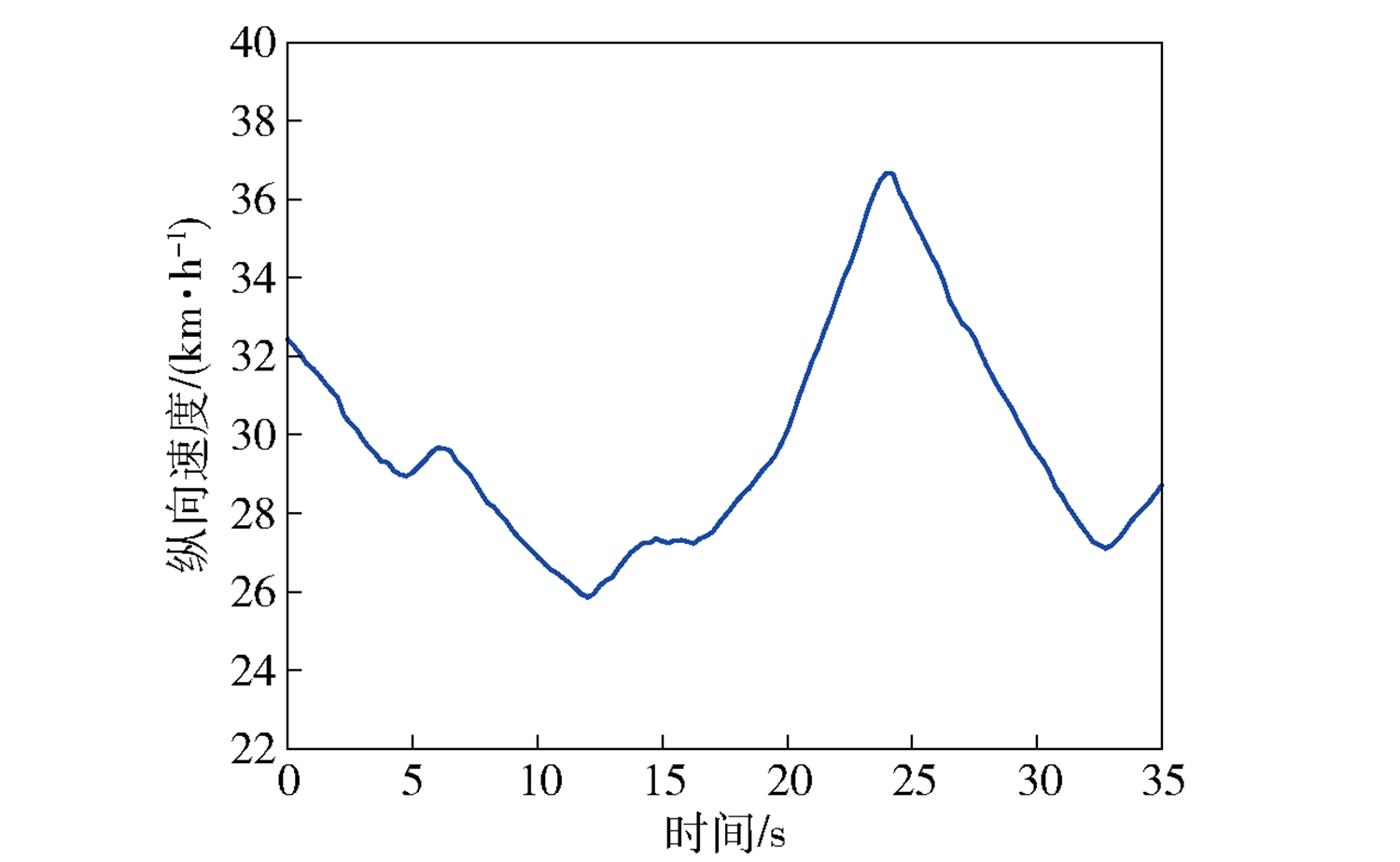
图6 实验纵向速度
Fig.6 Experimental longitudinal velocity
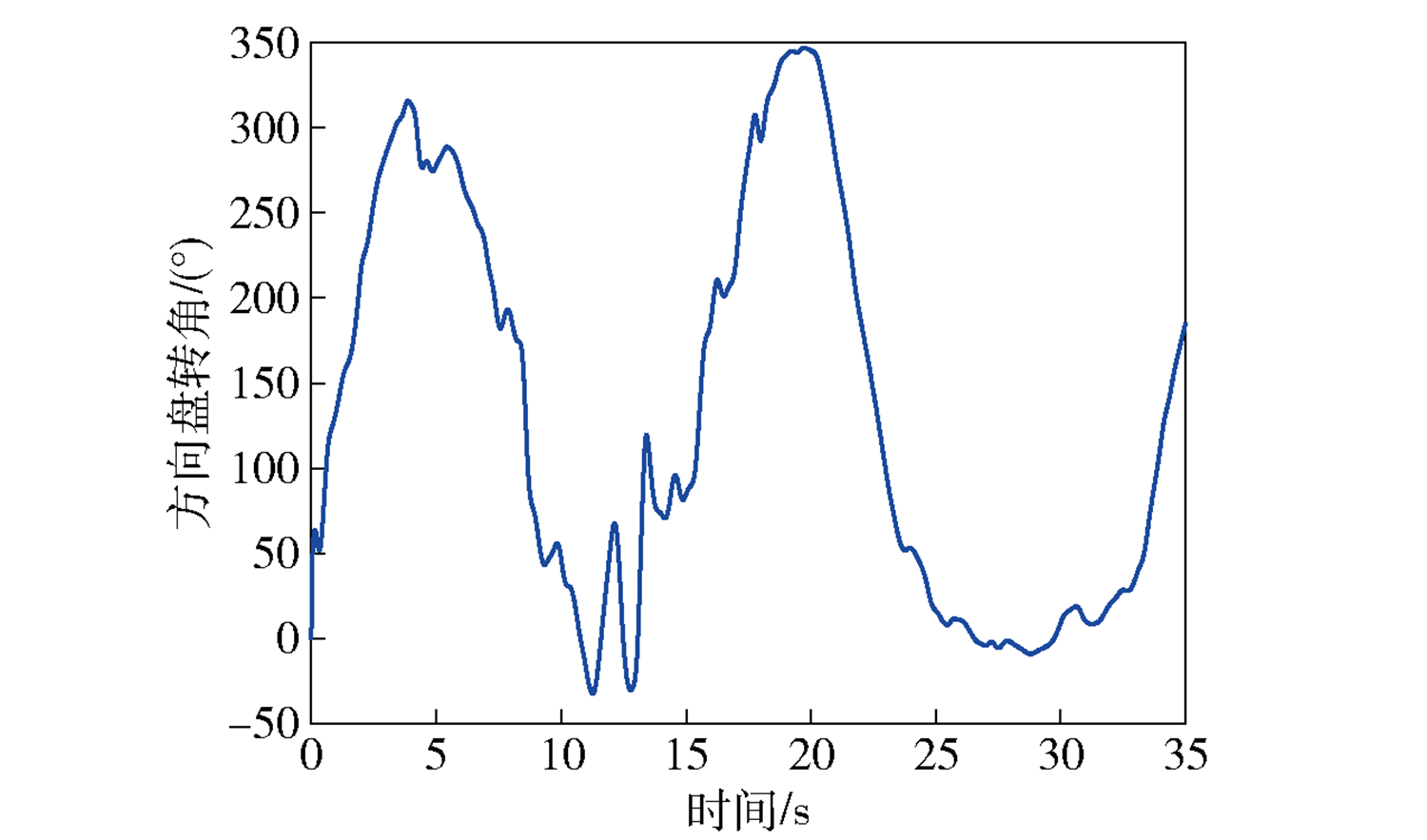
图7 实验方向盘转角
Fig.7 The experimental steering wheel angle
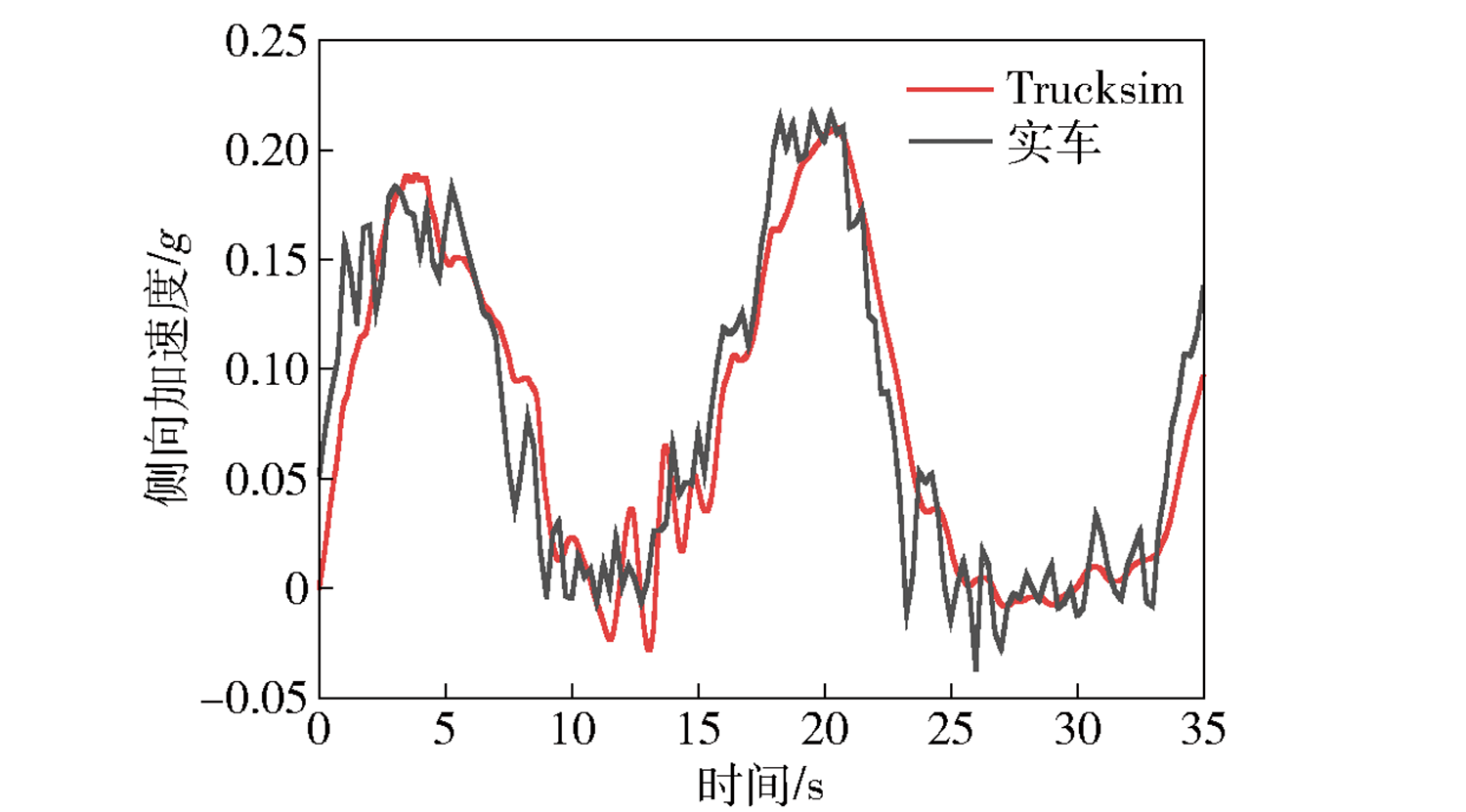
图8 侧向加速度验证
Fig.8 Lateral acceleration verification
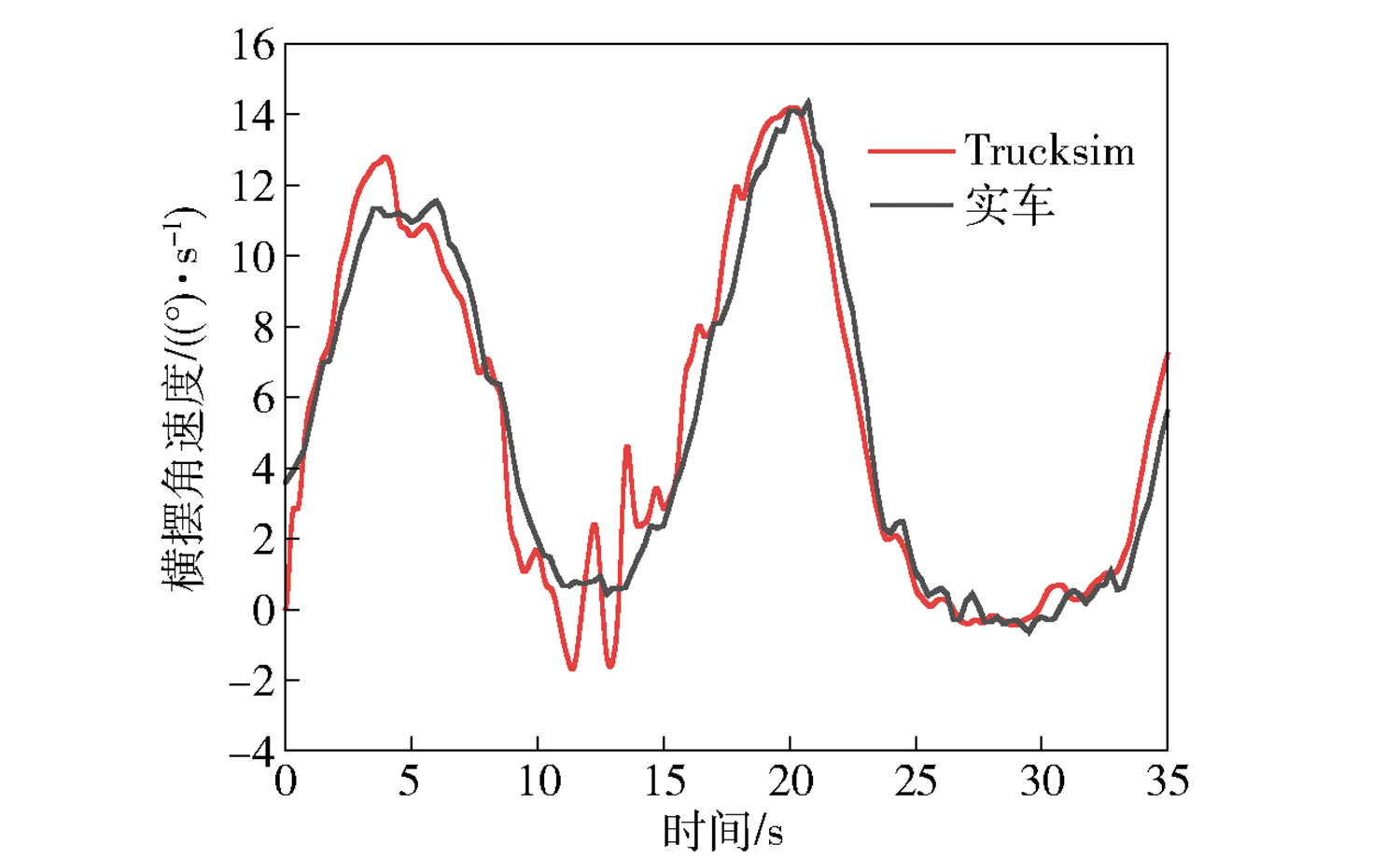
图9 横摆角速度验证
Fig.9 Yaw rate verification
| 工况 | 均方根误差 | 最大误差 |
|---|---|---|
| 侧向加速度/g | 0.0023 | 0.0735 |
| 横摆角速度/(°·s-1) | 0.0359 | 3.6006 |
表3 Trucksim模型误差
Table 3 Trucksim model error
| 工况 | 均方根误差 | 最大误差 |
|---|---|---|
| 侧向加速度/g | 0.0023 | 0.0735 |
| 横摆角速度/(°·s-1) | 0.0359 | 3.6006 |
| 参数 | 数值 |
|---|---|
| 簧载质量ms/kg | 50200 |
| 转向系传动比τ | 24.6 |
| 绕z轴转动惯量Iz/(kg·m2) | 734251 |
| 绕侧倾轴转动惯量Ix/(kg·m2) | 230700 |
| 质心高度hc/m | 1.4 |
| 轮胎半径rw/m | 0.55 |
| 悬架等效侧倾刚度Ks/(N·m/rad) | 2000000 |
| 悬架等效阻尼系数Cs/(N·m·s/rad) | 120000 |
表4 Trucksim仿真车辆参数
Table 4 Trucksim simulated vehicle parameters
| 参数 | 数值 |
|---|---|
| 簧载质量ms/kg | 50200 |
| 转向系传动比τ | 24.6 |
| 绕z轴转动惯量Iz/(kg·m2) | 734251 |
| 绕侧倾轴转动惯量Ix/(kg·m2) | 230700 |
| 质心高度hc/m | 1.4 |
| 轮胎半径rw/m | 0.55 |
| 悬架等效侧倾刚度Ks/(N·m/rad) | 2000000 |
| 悬架等效阻尼系数Cs/(N·m·s/rad) | 120000 |
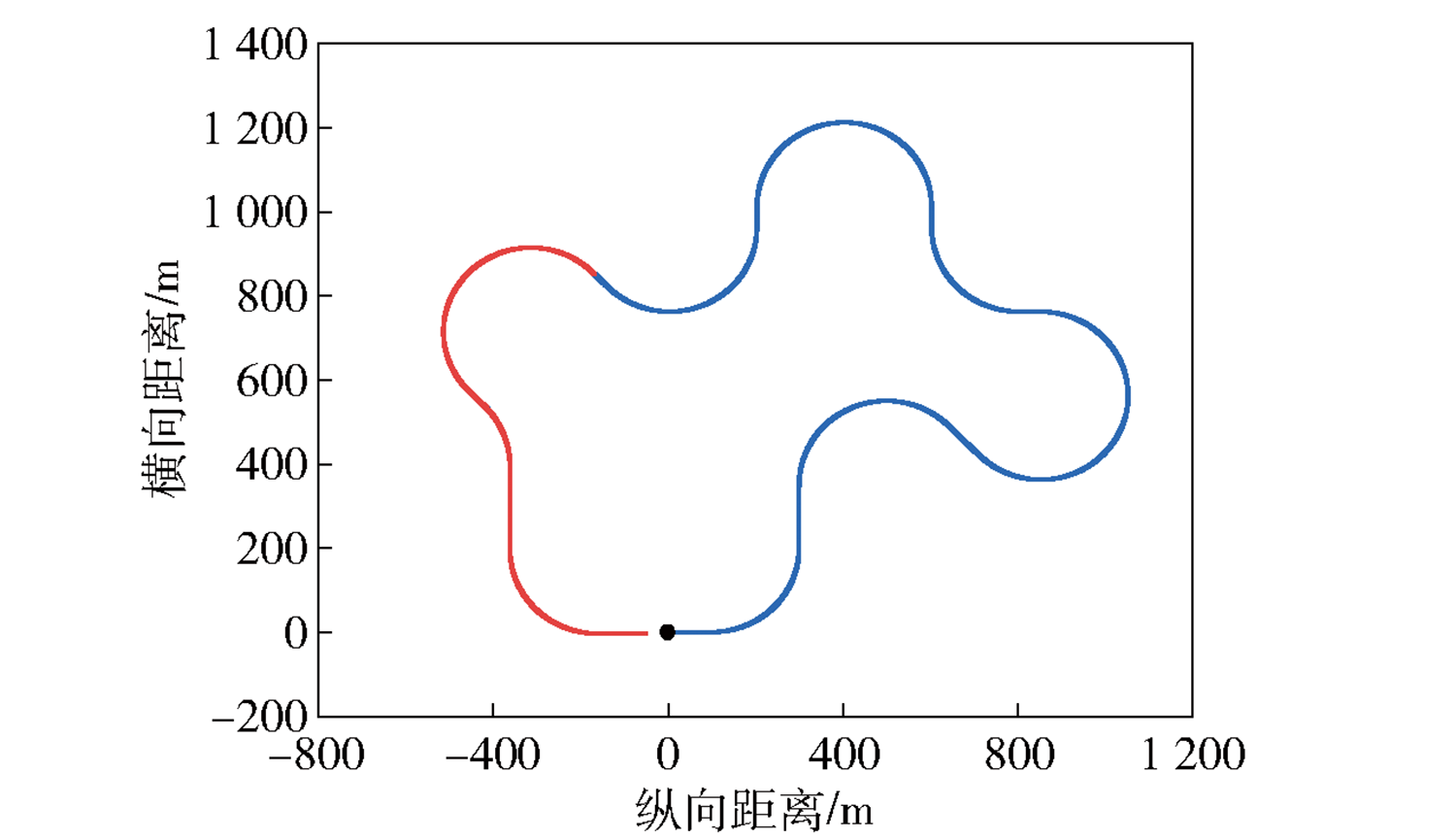
图10 数据集行驶路线
Fig.10 Driving path in dataset
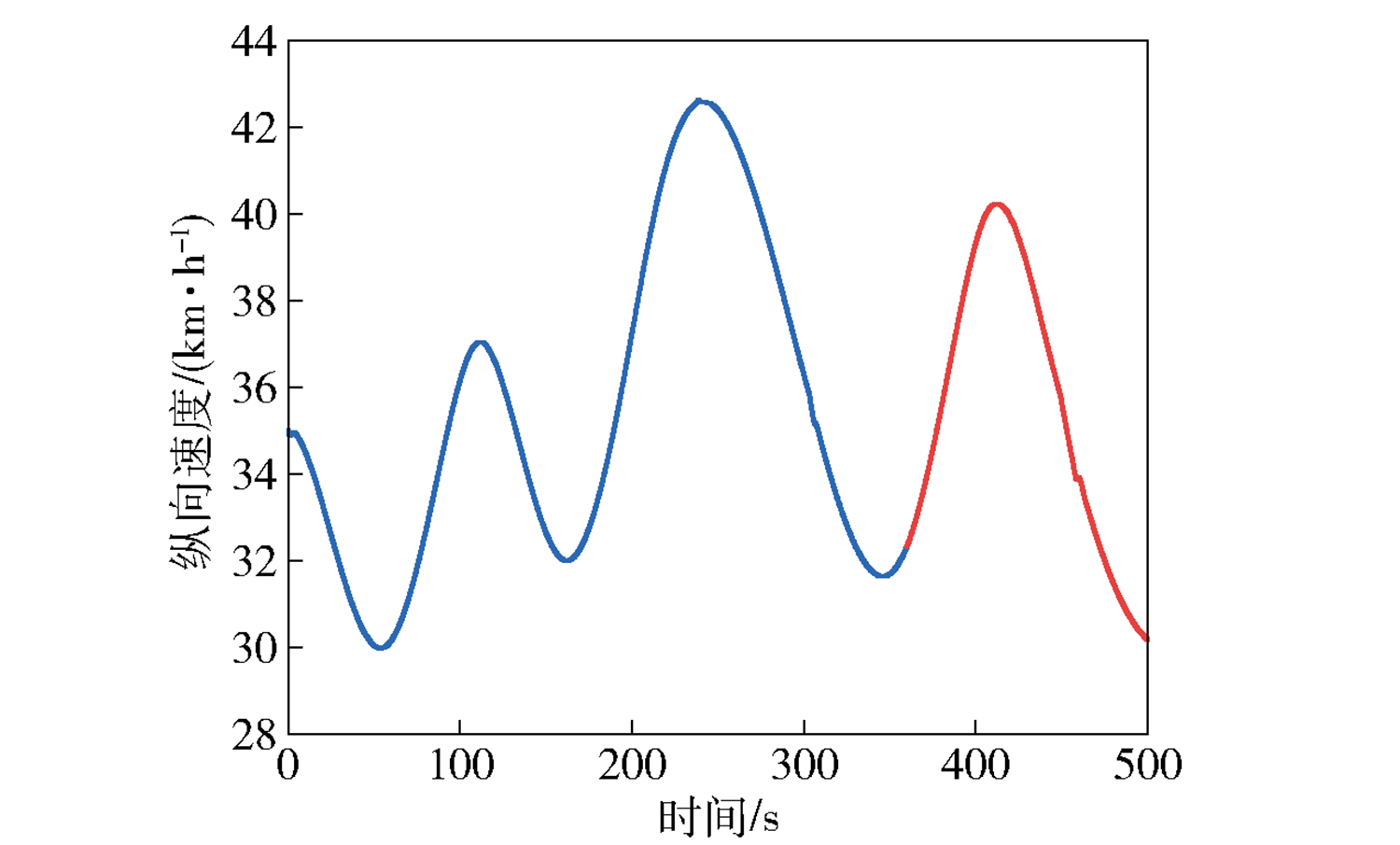
图11 数据集行驶速度
Fig.11 Longitudinal velocity in Dataset
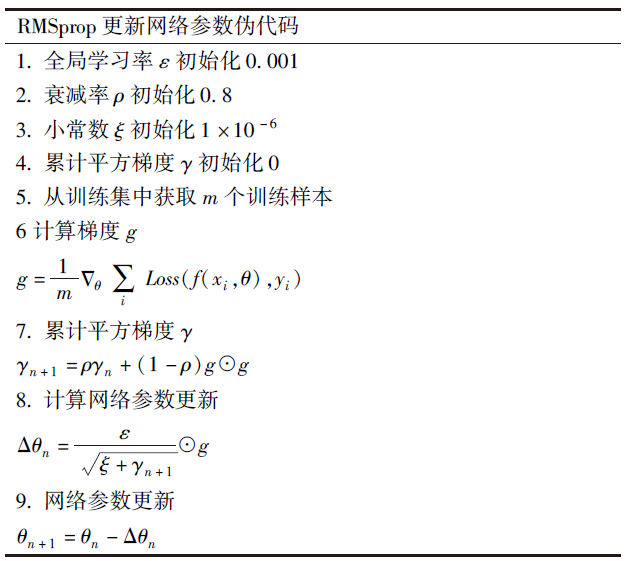
图12 RMSprop优化器更新策略
Fig.12 RMSprop optimizer update strategy
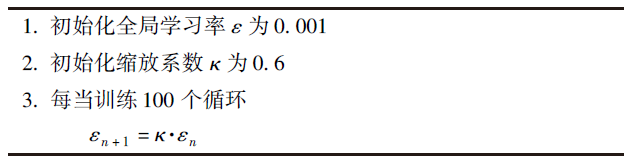
图13 全局学习率动态更新策略
Fig.13 Dynamic update strategy of global learning rate

图14 闭环训练
Fig.14 Training in closed structure
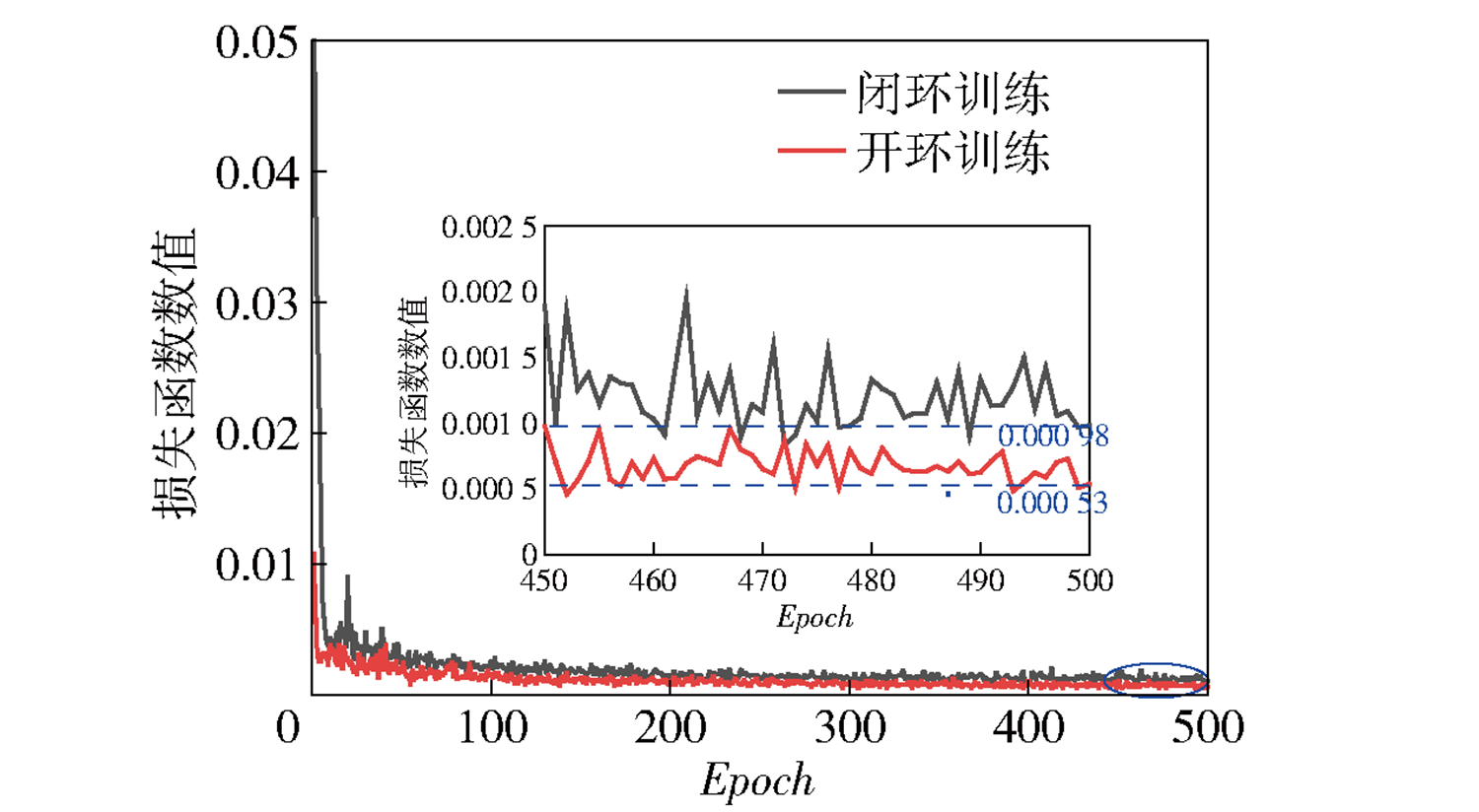
图15 损失函数变化对比
Fig.15 Comparison of loss function changes
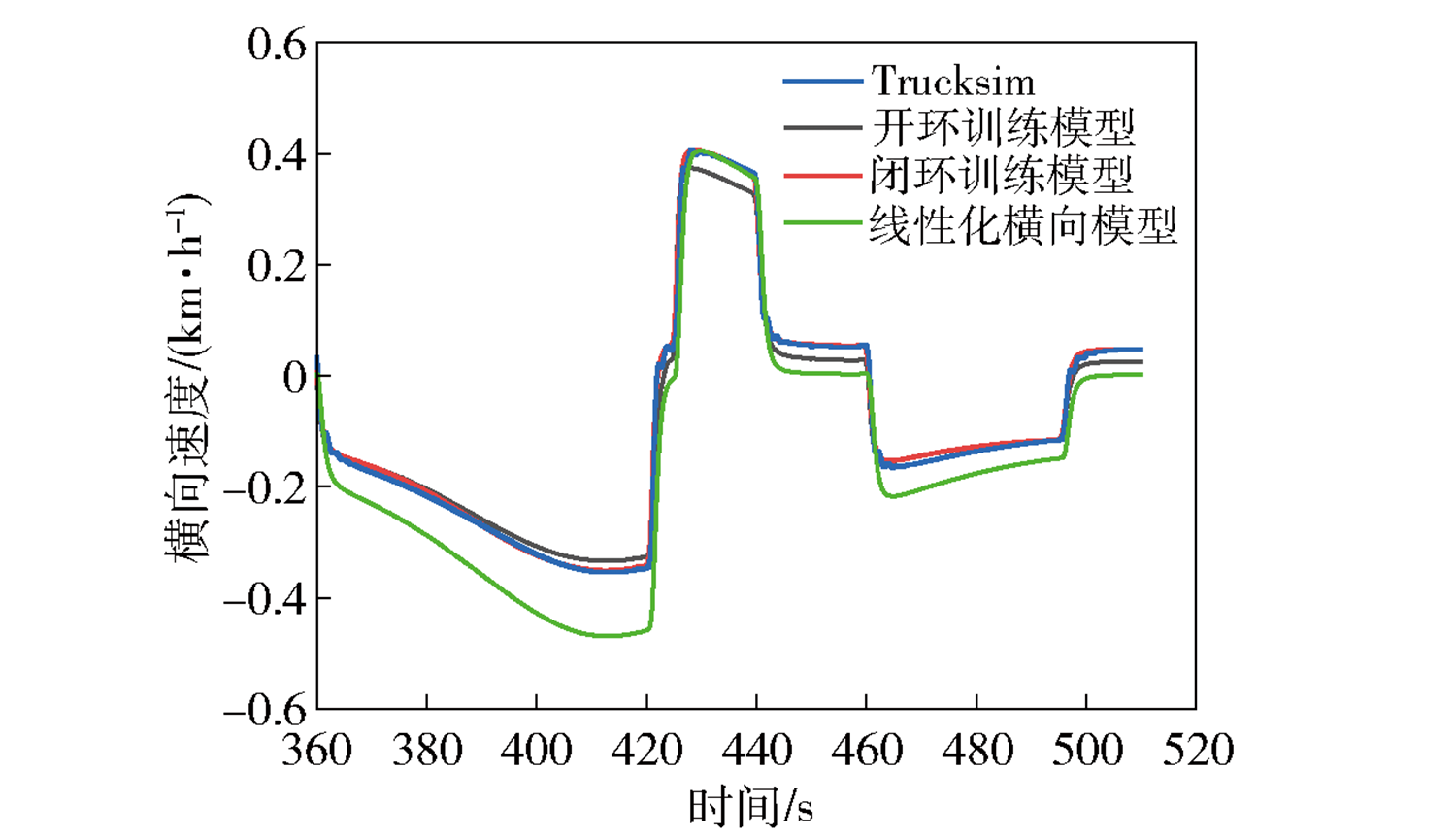
图16 横向速度预测结果对比
Fig.16 Comparison of lateral velocity prediction results

图17 横向速度绝对值误差
Fig.17 Absolute value error of lateral velocity
| 模型 | 标准差 | 最大值/ (km·h-1) | 平均值/ (km·h-1) |
|---|---|---|---|
| 线性化横向模型 | 0.035 | 0.233 | 0.061 |
| 开环训练模型 | 0.012 | 0.103 | 0.017 |
| 闭环训练模型 | 0.007 | 0.079 | 0.006 |
表5 横向速度误差统计分析
Table 5 Statistical analysis of lateral velocity
| 模型 | 标准差 | 最大值/ (km·h-1) | 平均值/ (km·h-1) |
|---|---|---|---|
| 线性化横向模型 | 0.035 | 0.233 | 0.061 |
| 开环训练模型 | 0.012 | 0.103 | 0.017 |
| 闭环训练模型 | 0.007 | 0.079 | 0.006 |

图18 横向速度相对误差分析
Fig.18 Relative error analysis of lateral velocity

图19 横摆角速度预测结果对比
Fig.19 Comparison of lateral velocity prediction results
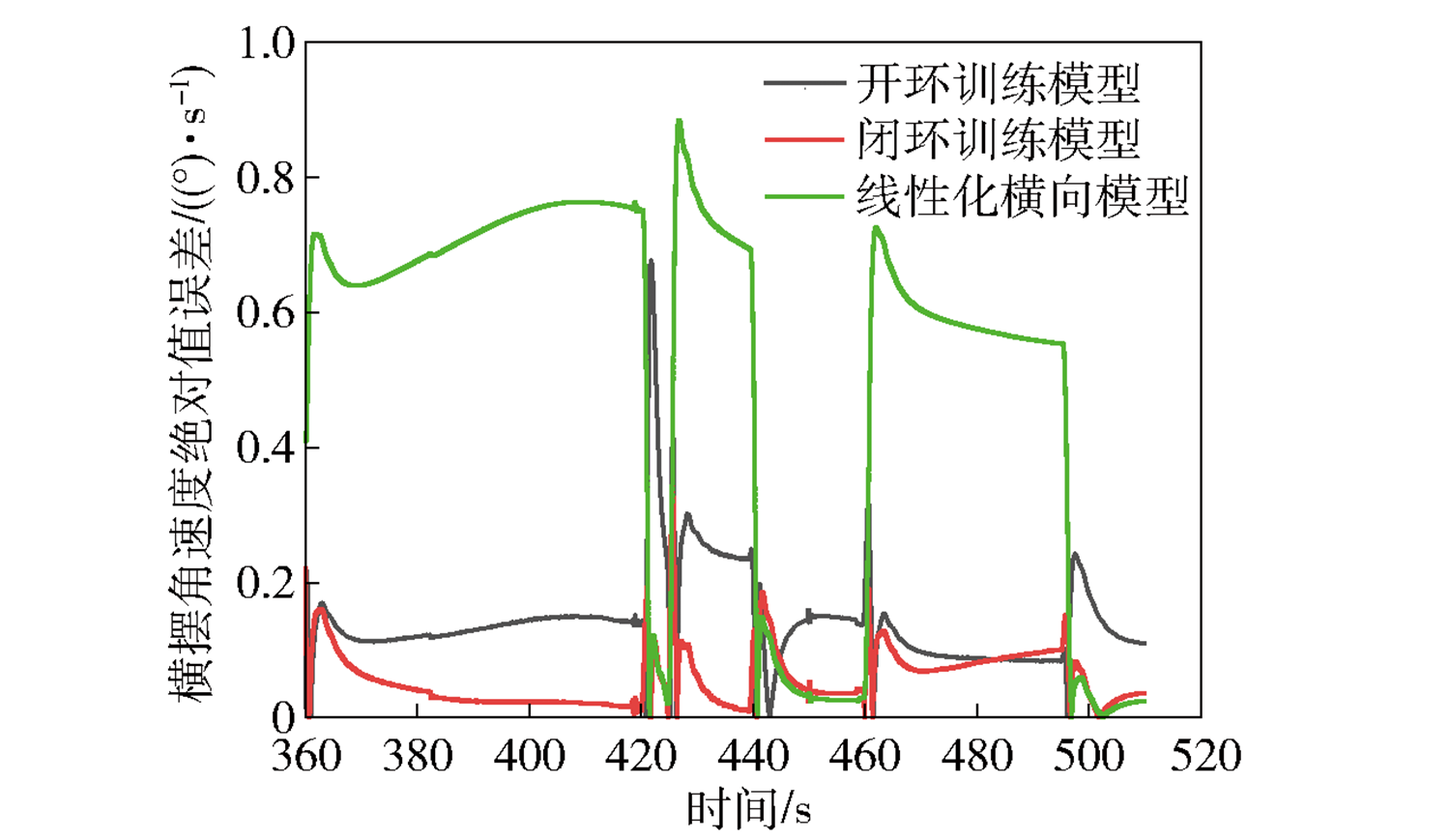
图20 横摆角速度绝对值误差
Fig.20 Absolute value error of lateral velocity
| 模型 | 标准差 | 最大值/ ((°)·s-1) | 平均值/ ((°)·s-1) |
|---|---|---|---|
| 线性化横向模型 | 0.283 | 0.885 | 0.514 |
| 开环训练 | 0.073 | 0.677 | 0.144 |
| 闭环训练 | 0.041 | 0.342 | 0.056 |
表6 横摆角速度误差统计分析
Table 6 Statistical analysis of yaw rate error
| 模型 | 标准差 | 最大值/ ((°)·s-1) | 平均值/ ((°)·s-1) |
|---|---|---|---|
| 线性化横向模型 | 0.283 | 0.885 | 0.514 |
| 开环训练 | 0.073 | 0.677 | 0.144 |
| 闭环训练 | 0.041 | 0.342 | 0.056 |
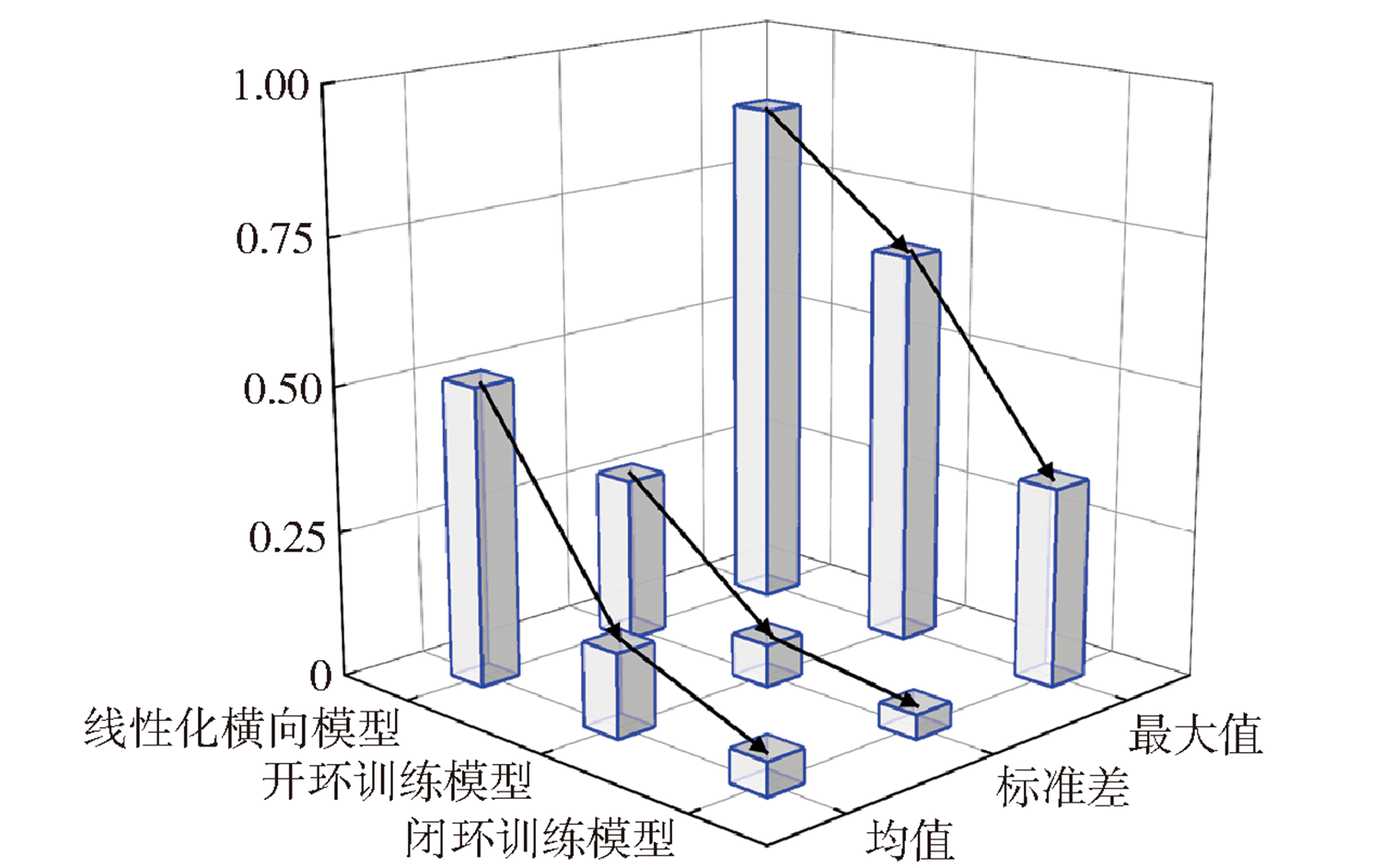
图21 横摆角速度误差对比分析图
Fig.21 Relative error analysis of yaw rate
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 50200 |
| 1轴至质心距离L1/m | 5.7 |
| 2轴至质心距离L2/m | 3.2 |
| 3轴至质心距离L3/m | 1.1 |
| 4轴至质心距离L4/m | 3.4 |
| 5轴至质心距离L5/m | 5.9 |
| 绕z轴转动惯量Iz/(kg·m2) | 734251 |
| 传动比η | 28 |
| 各轴轮胎侧偏刚度C/(N·rad-1) | 300000 |
| 时间间隔T/s | 0.01 |
表A-1 线性化横向动力学模型参数
Table A-1 Linearized lateral dynamics model parameters
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 50200 |
| 1轴至质心距离L1/m | 5.7 |
| 2轴至质心距离L2/m | 3.2 |
| 3轴至质心距离L3/m | 1.1 |
| 4轴至质心距离L4/m | 3.4 |
| 5轴至质心距离L5/m | 5.9 |
| 绕z轴转动惯量Iz/(kg·m2) | 734251 |
| 传动比η | 28 |
| 各轴轮胎侧偏刚度C/(N·rad-1) | 300000 |
| 时间间隔T/s | 0.01 |
| [1] |
陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6):1203-1214.
doi: 10.3969/j.issn.1000-1093.2017.06.021 |
|
|
|
| [2] |
张超朋, 刘庆霄, 董昊天, 等. 无人驾驶履带车辆机电联合制动的协调控制[J]. 兵工学报, 2022, 43(11):2727-2737.
|
|
|
|
| [3] |
李春明, 吴维, 郭智蔷, 等. 履带车辆纵向与垂向耦合动力学模型及功率特性[J]. 兵工学报, 2021, 42(3):449-458.
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
| [4] |
王博洋, 关海杰, 龚建伟, 等. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2):241-251.
|
|
doi: 10.3969/j.issn.1000-1093.2022.02.001 |
|
| [5] |
刘志浩, 高钦和, 刘准, 等. 重载轮胎面内刚柔耦合动力学建模及振动传递特性分析[J]. 兵工学报, 2018, 39(2):224-233.
doi: 10.3969/j.issn.1000-1093.2018.02.003 |
|
|
|
| [6] |
陈鼎, 侯亮, 祝青园, 等. 考虑轮胎几何与胎压因素的轮地相互作用力模型及其参数辨识[J]. 机械工程学报, 2020, 56(2):174-183.
doi: 10.3901/JME.2020.02.174 |
|
doi: 10.3901/JME.2020.02.174 |
|
| [7] |
许男, 周健锋, 郭孔辉, 等. 胎压载荷耦合效应下复合工况UniTire轮胎模型[J]. 机械工程学报, 2020, 56(16):193-203.
doi: 10.3901/JME.2020.16.193 |
|
doi: 10.3901/JME.2020.16.193 |
|
| [8] |
王珍, 项昌乐, 刘辉, 等. 基于集中-分布参数模型的车辆机电传动系统动力学响应及影响规律[J]. 兵工学报, 2021, 42(10):2145-2158.
doi: 10.3969/j.issn.1000-1093.2021.10.010 |
|
|
|
| [9] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
|
|
| [10] |
郭弘明, 席军强, 陈慧岩, 等. 电驱动无人履带车辆线控机电联合制动技术研究[J]. 兵工学报, 2019, 40(6):1130-1136.
doi: 10.3969/j.issn.1000-1093.2019.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.06.002 |
|
| [11] |
邹渊, 张彬, 张旭东, 等. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10):2159-2169.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.011 |
|
| [12] |
王博洋, 龚建伟, 张瑞增, 等. 基于真实驾驶数据的运动基元提取与再生成[J]. 机械工程学报, 2020, 56(16):155-165.
doi: 10.3901/JME.2020.16.155 |
|
doi: 10.3901/JME.2020.16.155 |
|
| [13] |
江昕炜, 陈龙, 华一丁, 等. 基于改进型ELM的熟练驾驶员行车轨迹拟合方法研究[J]. 汽车工程, 2021, 43(11):1620-1630.
|
|
|
|
| [14] |
doi: 10.1016/j.measurement.2021.109541 URL |
| [15] |
doi: 10.1080/00423114.2018.1564834 URL |
| [16] |
doi: 10.1504/IJVD.2010.034101 URL |
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1016/j.neunet.2021.02.011 pmid: 33662649 |
| [1] | 王尔烈,王帅,皮大伟,王洪亮,王显会,谢伯元. 某纯电驱动重载车辆能耗预测模型[J]. 兵工学报, 2024, 45(4): 1229-1236. |
| [2] | 刘梦真, 黄广炎, 张宏, 周宏元, 刘思宇. 小样本驱动特征分段网络的防护材料折痕检测[J]. 兵工学报, 2024, 45(3): 963-974. |
| [3] | 秦国华, 娄维达, 林锋, 徐勇. 基于Cotes求积法和神经网络的稳定域判断及铣削参数优化新方法[J]. 兵工学报, 2024, 45(2): 516-526. |
| [4] | 吕卫民, 孙晨峰, 任立坤, 赵杰, 李永强. 一种基于TCN-LGBM的航空发动机气路故障诊断方法[J]. 兵工学报, 2024, 45(1): 253-263. |
| [5] | 刘畅, 雷红波, 林时尧, 范世鹏, 王江. 基于多模型网络的激光末制导炮弹诸元解算方法[J]. 兵工学报, 2023, 44(9): 2745-2755. |
| [6] | 张凯歌, 卢志刚, 聂天常, 李志伟, 郭宇强. 面向无人装备的智能边缘计算软技术分析[J]. 兵工学报, 2023, 44(9): 2611-2621. |
| [7] | 刘冰, 郝新红, 周文, 杨瑾. 基于BAS-BPNN的调频无线电引信目标与扫频干扰识别方法[J]. 兵工学报, 2023, 44(8): 2391-2403. |
| [8] | 周宇, 曹荣刚, 栗苹, 马啸. 一种用于外场试验图像的引信炸点检测方法[J]. 兵工学报, 2023, 44(8): 2453-2464. |
| [9] | 吴礼洋, 呙鹏程, 刘超, 李文强. 基于注意力机制增强残差网络的雷达信号调制类型识别[J]. 兵工学报, 2023, 44(8): 2310-2318. |
| [10] | 解宝琦, 李英顺, 王德彪, 隋欢欢. 一种坦克炮长瞄准镜系统状态评估的方法[J]. 兵工学报, 2023, 44(8): 2414-2423. |
| [11] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [12] | 宋秋雨, 胡健, 姚建勇, 白艳春, 杨正银. 面向输出约束基于神经网络观测器的发射平台输出反馈控制[J]. 兵工学报, 2023, 44(7): 2184-2196. |
| [13] | 华英杰, 刘晶, 邵玉斌, 朵琳. 面向战场环境下的语种识别[J]. 兵工学报, 2023, 44(7): 2197-2206. |
| [14] | 何锦成, 韩永成, 张闻文, 何伟基, 陈钱. 基于通道校正卷积的真彩色微光图像增强[J]. 兵工学报, 2023, 44(6): 1643-1654. |
| [15] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4