
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (7): 2184-2196.doi: 10.12382/bgxb.2022.0229
宋秋雨1, 胡健1,2,*( ), 姚建勇1, 白艳春1, 杨正银1
), 姚建勇1, 白艳春1, 杨正银1
收稿日期:2022-04-03
上线日期:2023-07-30
通讯作者:
SONG Qiuyu1, HU Jian1,2,*(), YAO Jianyong1, BAI Yanchun1, YANG Zhengyin1
Received:2022-04-03
Online:2023-07-30
摘要:
一种由两台永磁同步电机驱动的发射平台用于发射动能载荷,但该平台在实际运行中经常面临比较强的参数不确定性和气流冲击等未知的外部干扰,大大降低其跟踪精度。针对这一问题,提出一种用于发射平台高精度运动控制的考虑输出约束的基于自适应神经网络观测器输出反馈控制器。该控制器采用扩展状态观测器估计系统中的参数不确定性,同时利用其观测的系统速度值设计相关控制量,从而达到输出反馈控制的目的;另外设计一种改进的样条小脑模型关节控制器神经网络(Spline CMAC)对系统中的未知扰动进行估计,由此利用前馈补偿技术对参数不确定性和时变扰动进行补偿。考虑到发射平台在实际情况中遇到的输出约束问题,采用障碍Lyapunov函数分析法设计控制率并证明了系统的稳定性。仿真和实验结果表明:在考虑输出约束的条件下,新的复合控制器能够实现系统的一致最终有界稳定,且跟踪性能很好,并具有很强的抗干扰能力,相比于传统的控制方法有很大的提升。
宋秋雨, 胡健, 姚建勇, 白艳春, 杨正银. 面向输出约束基于神经网络观测器的发射平台输出反馈控制[J]. 兵工学报, 2023, 44(7): 2184-2196.
SONG Qiuyu, HU Jian, YAO Jianyong, BAI Yanchun, YANG Zhengyin. Output Feedback Control for Launch Platform Using Neural Network Observer and Output Constraint[J]. Acta Armamentarii, 2023, 44(7): 2184-2196.
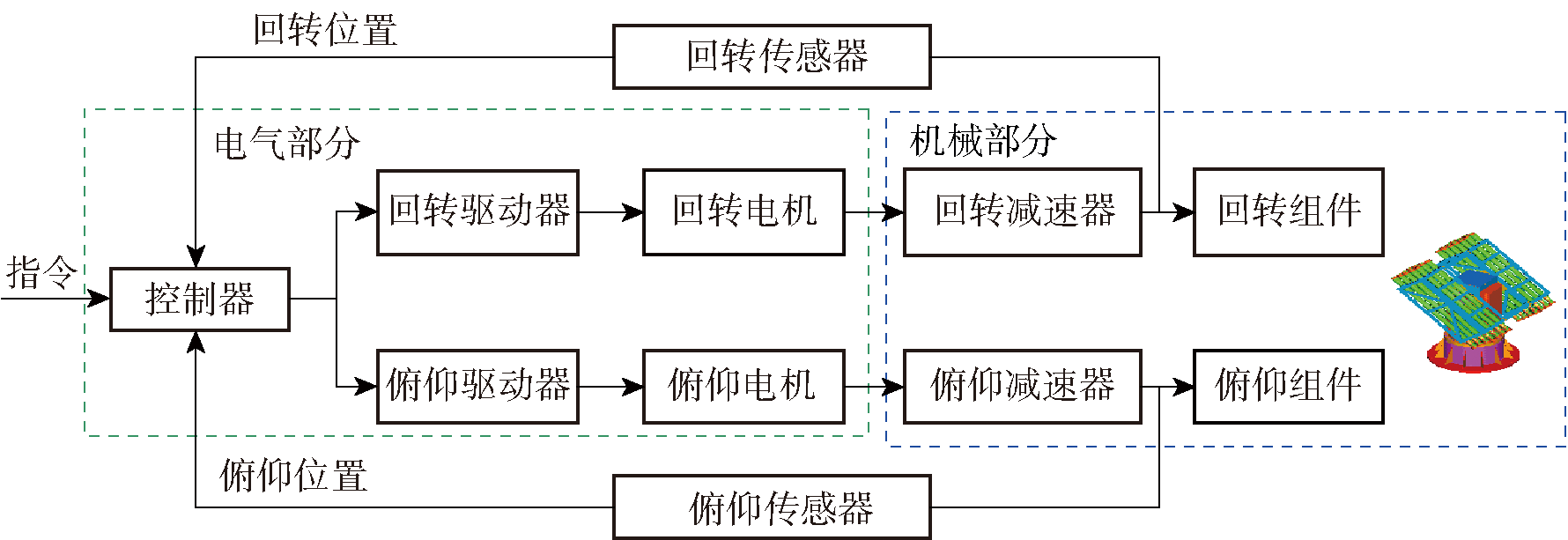
图1 发射平台系统框图
Fig.1 Block diagram of launch platform system

图2 一个三层二输入的Spline CMAC神经网络:只显示由输入索引的激活基函数
Fig.2 A spline CMAC neural network with three layers and two inputs-only the activated basis functions indexed by the input are illustrated

图3 假设预测是正确的(索引从左向右移动):在时间1,索引基函数预测下一个索引单元格将在右边(图3(a));在时间2,原始的基函数仍然被激活(图3(b)),它与时间2索引层上的新基函数重叠(图3(c))
Fig.3 Assuming that the prediction is correct (the index moves from left to right): the index base function predicts that the next index cell will be on the right at time 1 (Fig. 3(a)); the original base function is still active at time 2 (Fig. 3(b)), which overlaps with the new base function on the index layer at time 2 (Fig. 3(c))
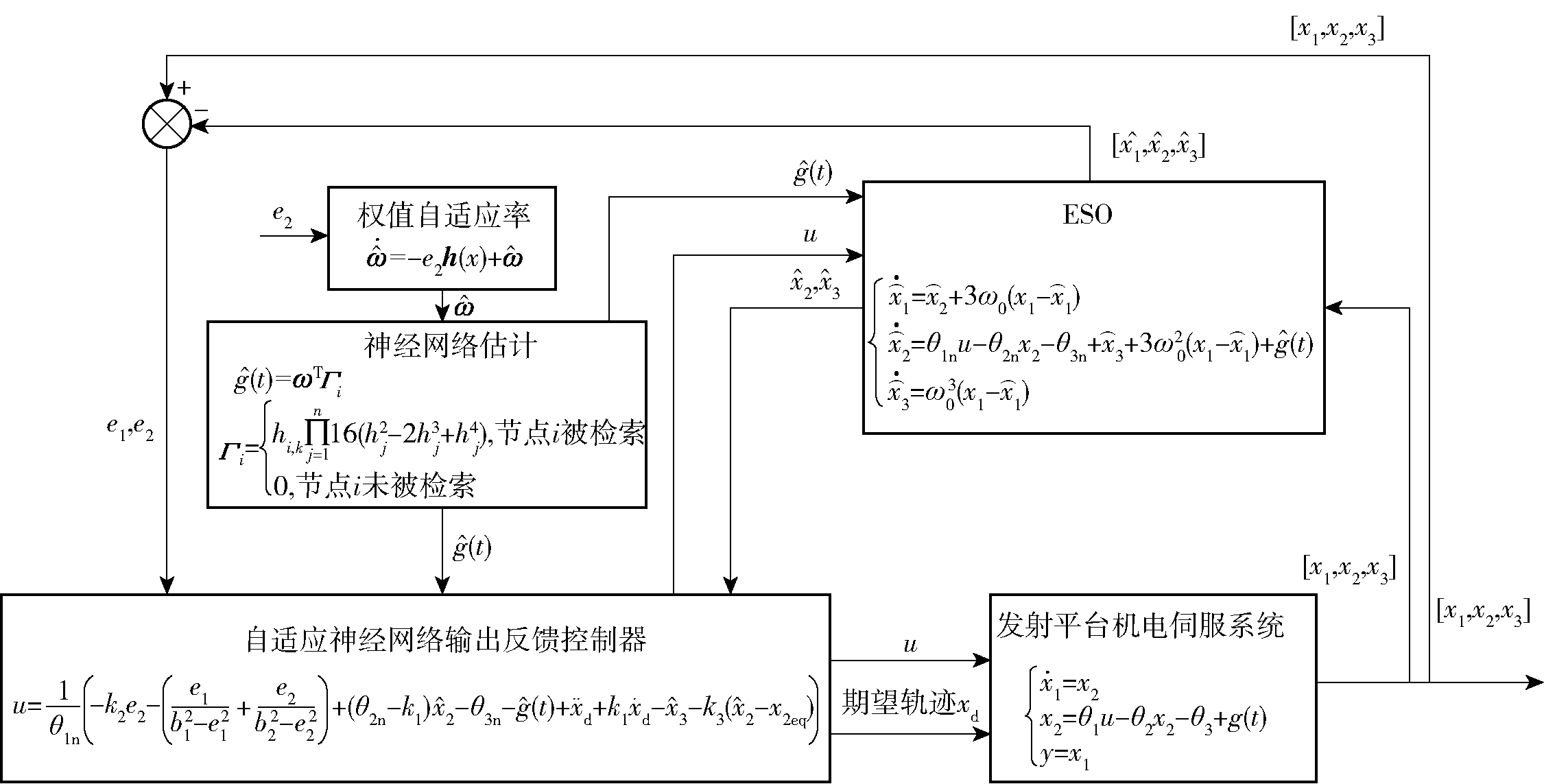
图4 控制策略图
Fig.4 Control strategy diagram
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
表1 发射平台机电作动系统的参数值
Table 1 Parameter values of the electromechanical actuation system of the launch platform
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
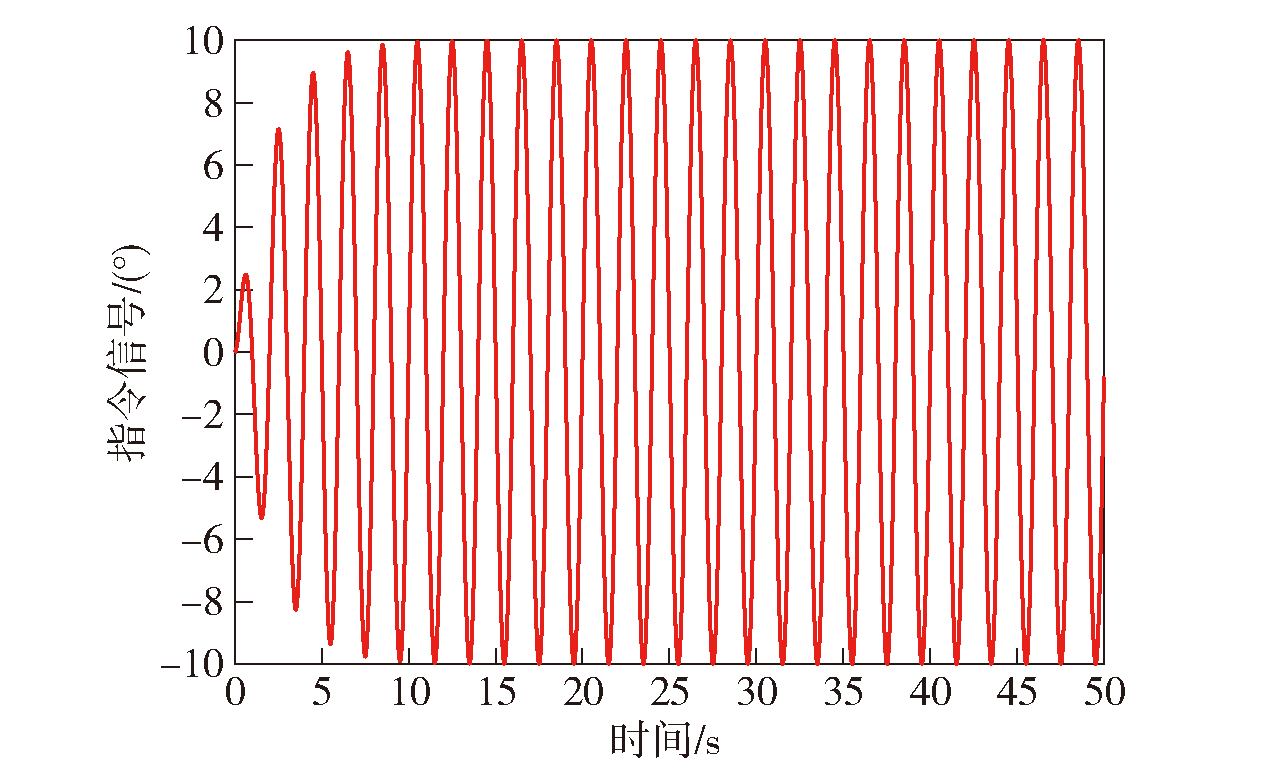
图5 指令信号输出曲线
Fig.5 Output curve of the command signals
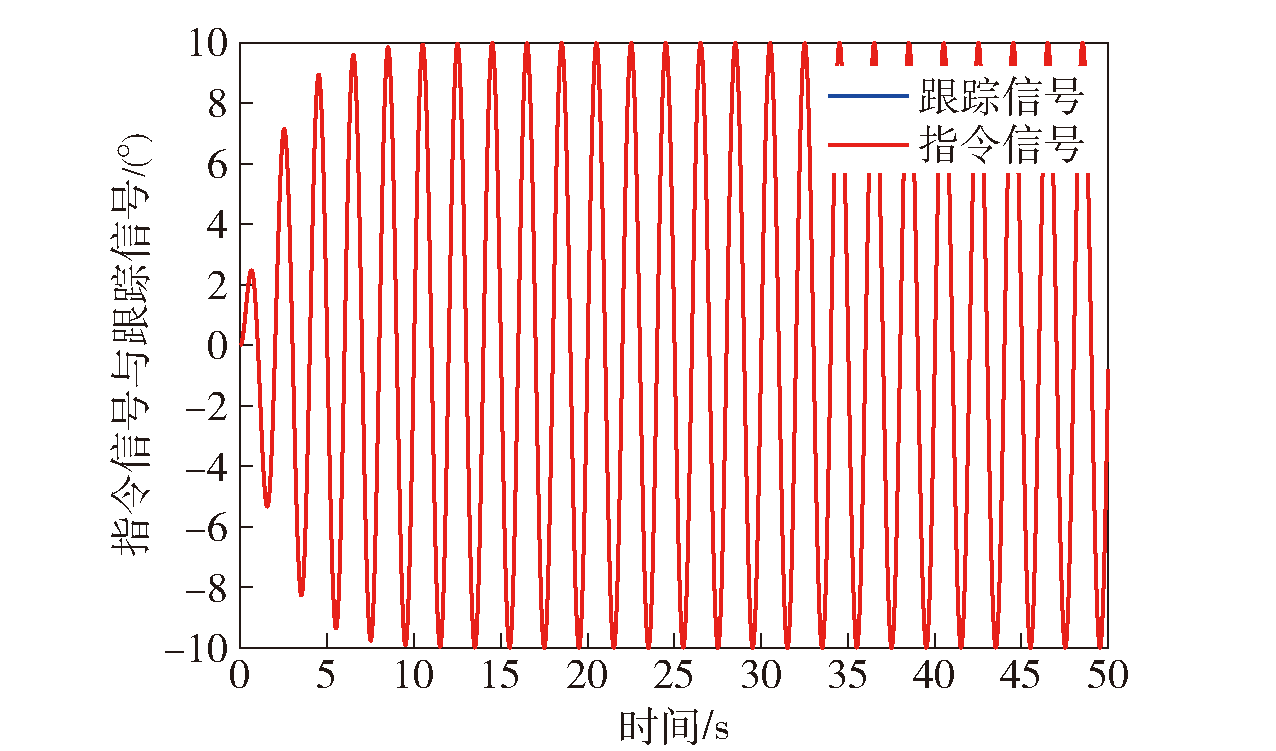
图6 OF_ESO_ Spline CMAC的位置曲线
Fig.6 Position curve of OF_ESO_ Spline CMAC
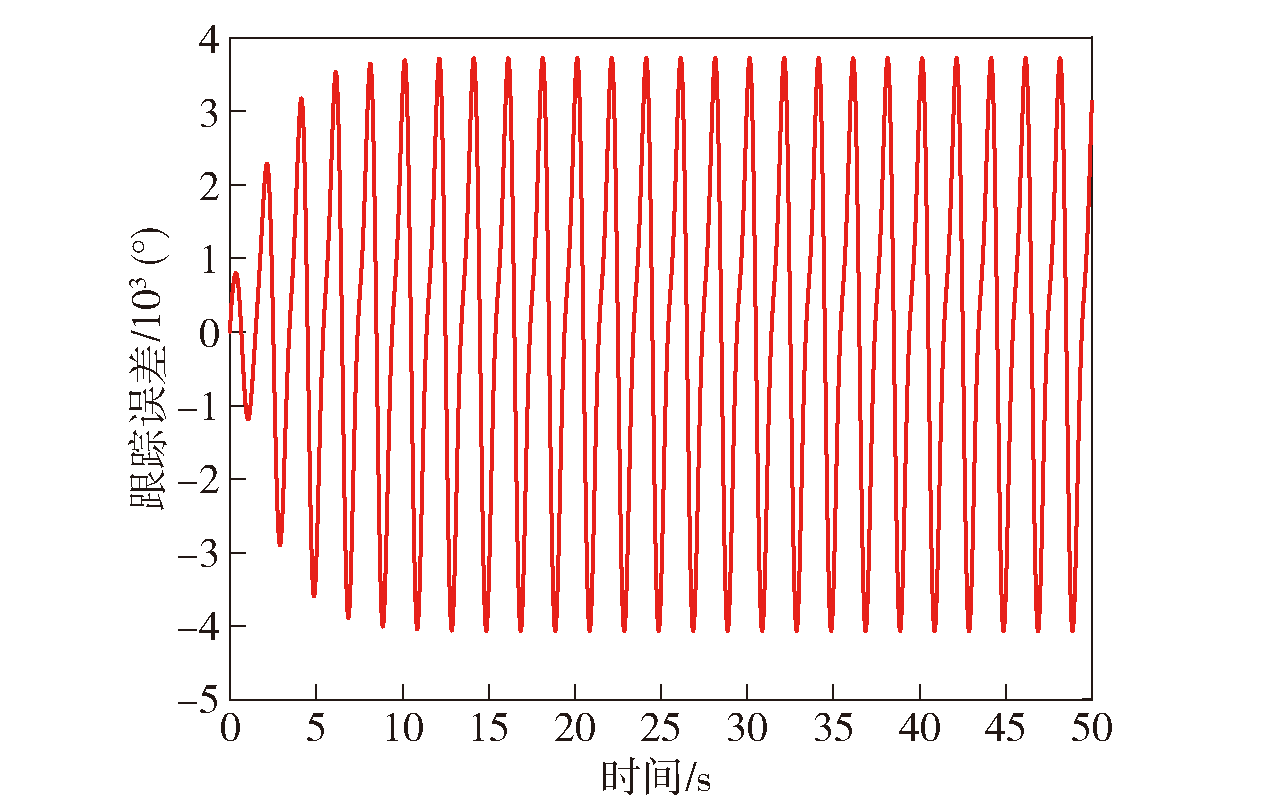
图7 OF_ESO_ Spline CMAC的跟踪误差
Fig.7 Tracking error of OF_ESO_ Spline CMAC
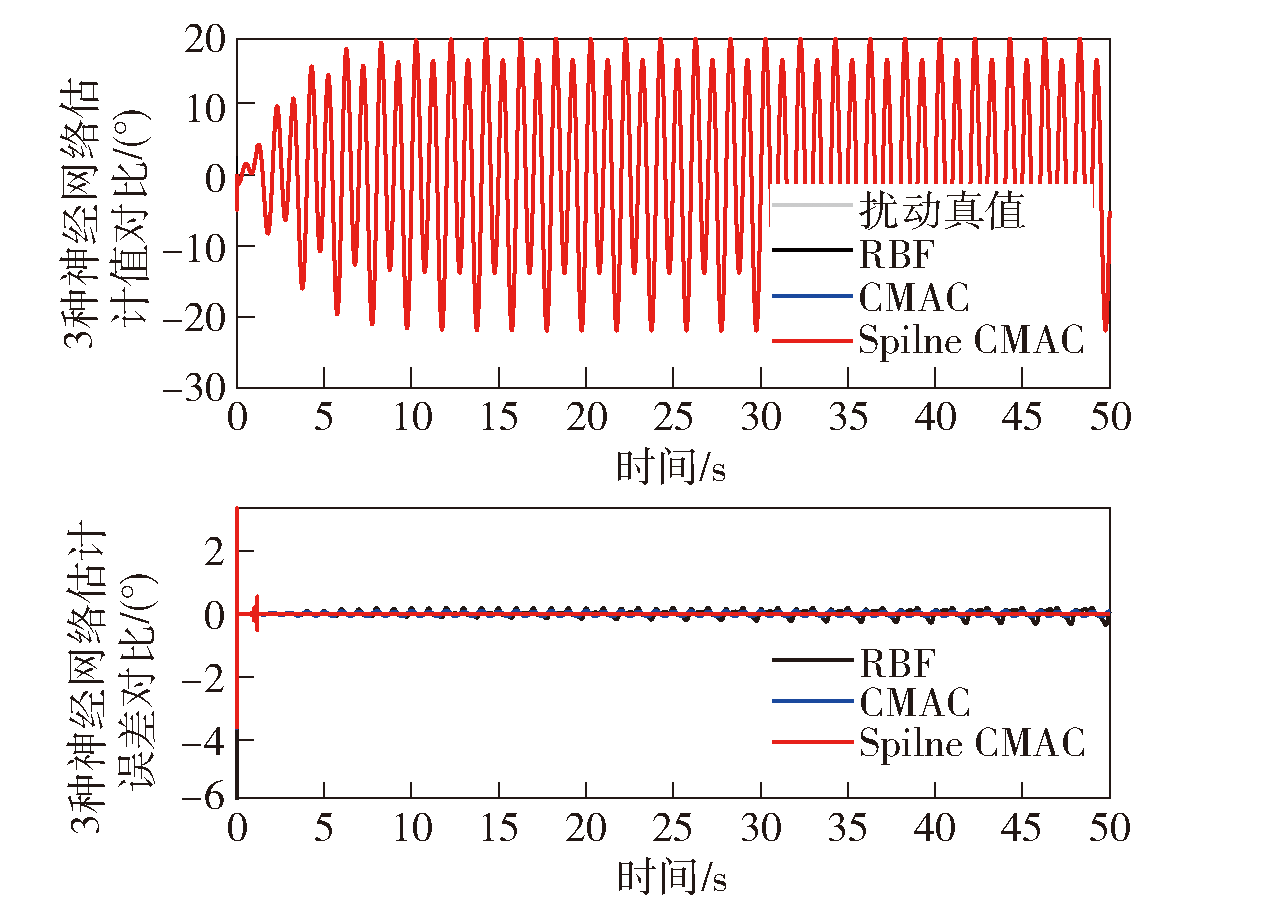
图8 3种神经网络估计值与误差对比
Fig.8 Comparison of three neural network estimates
| 控制器 | 最大值 | 平均值 | 标准方差 |
|---|---|---|---|
| OF_ESO | 0.01077 | 0.00299 | 0.005498 |
| OF_ESO_RBF | 0.006459 | 0.001493 | 0.003516 |
| OF_ESO_CMAC | 0.005864 | 0.001278 | 0.003234 |
| OF_ESO_ Spline CMAC | 0.003762 | 0.0003677 | 0.002393 |
表2 仿真跟踪误差指标
Table 2 Simulation tracking error index (°)
| 控制器 | 最大值 | 平均值 | 标准方差 |
|---|---|---|---|
| OF_ESO | 0.01077 | 0.00299 | 0.005498 |
| OF_ESO_RBF | 0.006459 | 0.001493 | 0.003516 |
| OF_ESO_CMAC | 0.005864 | 0.001278 | 0.003234 |
| OF_ESO_ Spline CMAC | 0.003762 | 0.0003677 | 0.002393 |
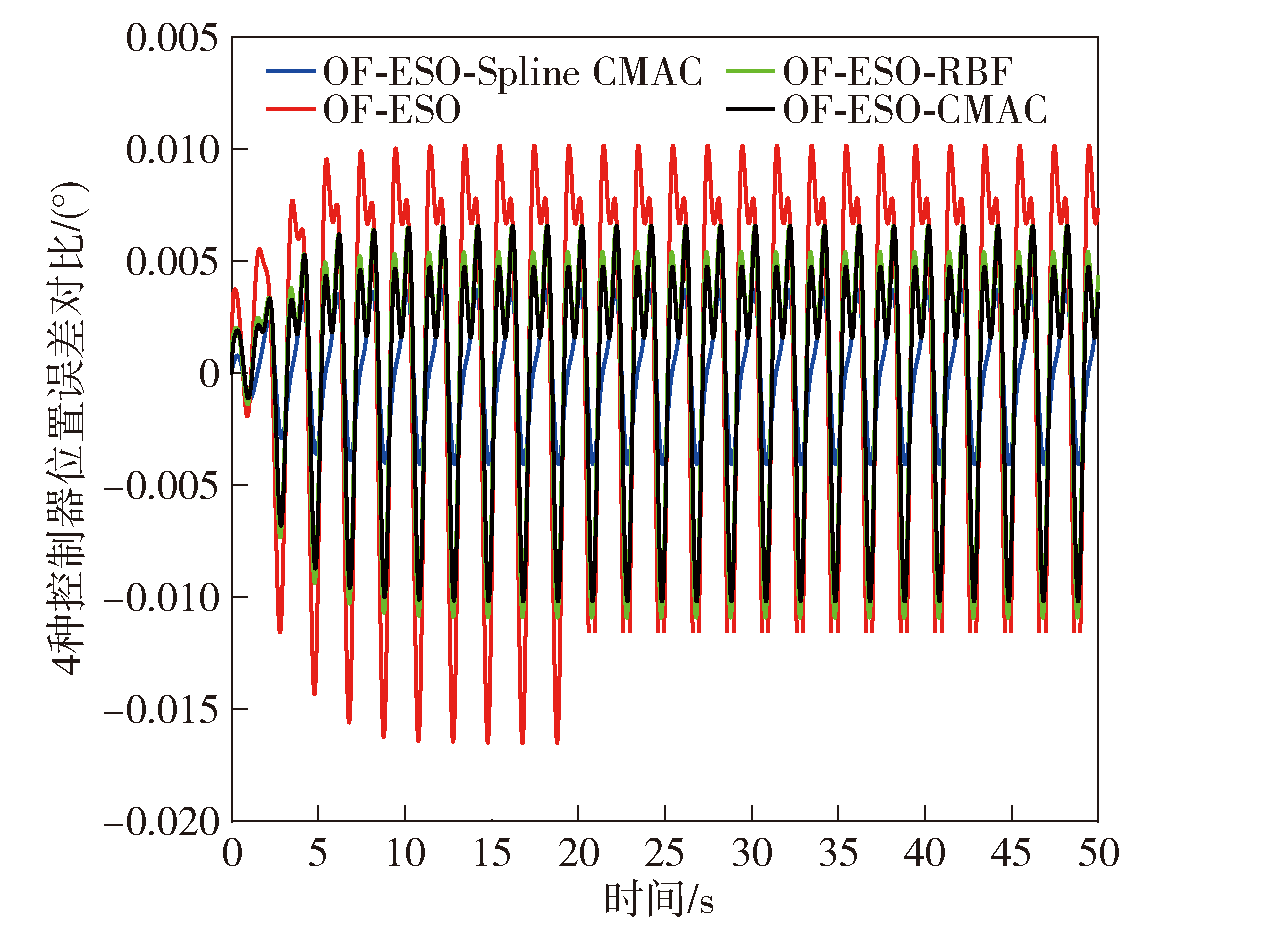
图9 4种控制器的跟踪误差对比
Fig.9 Comparison of tracking errors of four controllers

图10 发射平台以及基于DSP的控制电路板(上为发射平台,下为控制电路板)
Fig.10 Launch platform and control circuit board based on DSP (the top is the launch platform, and the bottom is the control circuit board)
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
| 定子电阻R/Ω | 1.32 |
| 绕组电感L/H | 0.0311 |
| 额定电流I/A | 3.1 |
表3 发射平台实验装置机电作动系统的系统参数
Table 3 System parameter values ofthe electromechanical actuation system of the launching platform
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
| 定子电阻R/Ω | 1.32 |
| 绕组电感L/H | 0.0311 |
| 额定电流I/A | 3.1 |
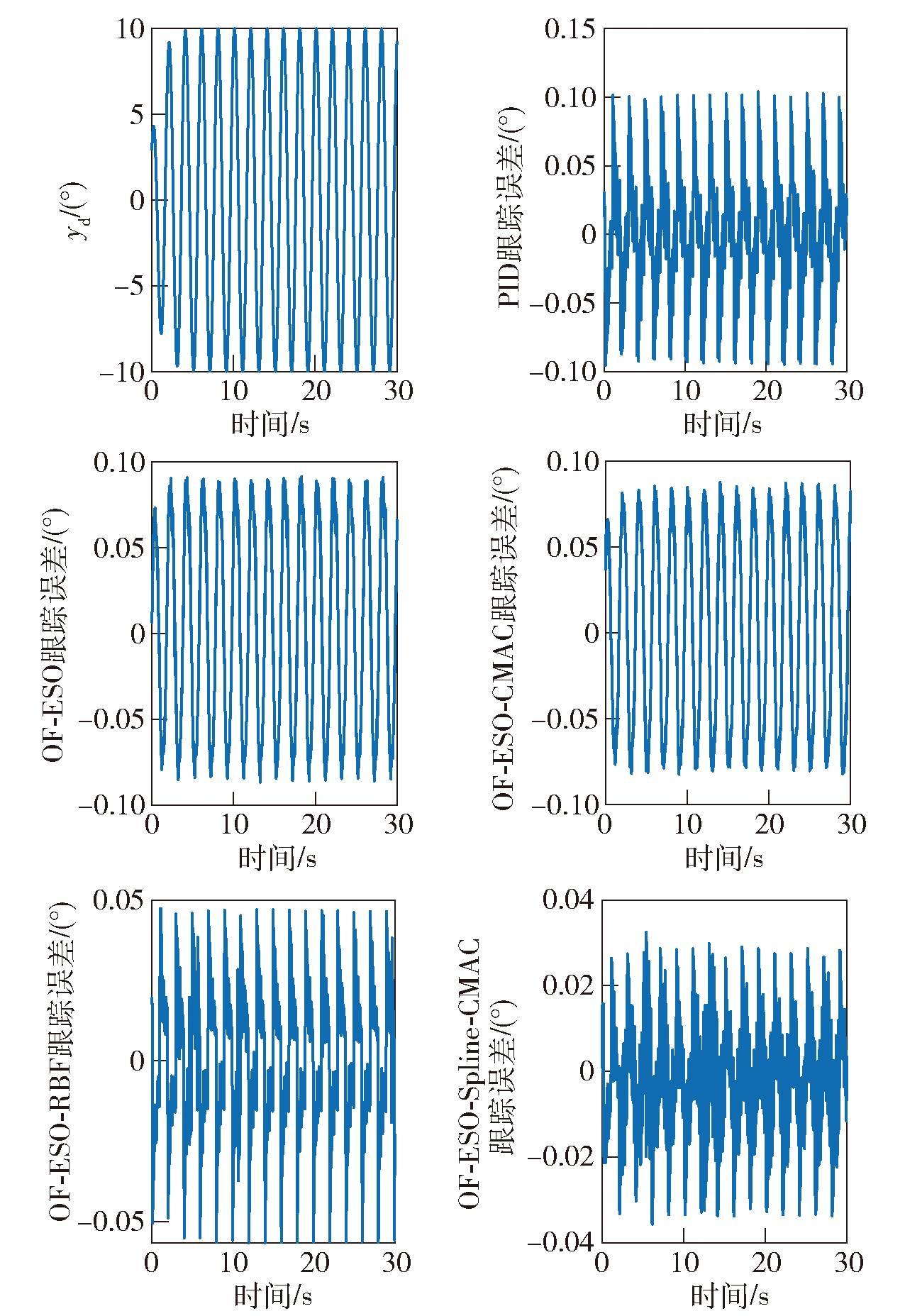
图11 工况Ⅰ下5种控制器跟踪误差对比
Fig.11 Comparison of tracking errors of five controllers under the working condition Ⅰ

图12 工况Ⅱ下5种控制器跟踪误差对比
Fig.12 Comparison of tracking errors of five controllers under the working condition Ⅱ

图13 工况Ⅲ下5种控制器跟踪误差对比
Fig.13 Comparison of tracking errors of five controllers under the working condition Ⅲ
| [1] |
李自勇, 戴田国, 马大为, 等. 新型火箭发射平台动力学仿真与优化研究[J]. 火炮发射与控制学报, 2008(1):39-41.
|
|
|
|
| [2] |
侯孝涵, 杨兴华, 杨喜军, 等. 基于新型趋近律的PMSM反馈线性化滑模控制[J]. 微电机, 2019, 52(12):45-48.
|
|
|
|
| [3] |
张海刚, 胡添添, 王步来, 等. 一种改进的PMSM滑模变结构控制策略研究[J]. 电气传动, 2019, 49(10):13-15.
|
|
|
|
| [4] |
doi: 10.1109/TIE.2010.2066535 URL |
| [5] |
韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [6] |
doi: 10.1109/TIE.2009.2024655 URL |
| [7] |
doi: 10.1109/TIE.2009.2036029 URL |
| [8] |
doi: 10.1109/TMECH.2010.2047652 URL |
| [9] |
doi: 10.1109/TIE.2011.2157276 URL |
| [10] |
朱玉川, 马大为, 李志刚, 等. 带积分项的火箭炮最优滑模伺服控制[J]. 兵工学报, 2007, 28(10):1272-1275.
|
|
|
|
| [11] |
柴华伟, 马大为, 李志刚, 等. 交流伺服系统最优内模滑模控制器设计与应用[J]. 南京航空航天大学学报, 2007, 39(4):510-513.
|
|
|
|
| [12] |
doi: 10.1109/TMECH.2012.2204765 URL |
| [13] |
doi: 10.1109/TIE.2008.2011621 URL |
| [14] |
|
| [15] |
郑颖, 马大为, 姚建勇, 等. 火箭炮两轴耦合位置伺服系统线性自抗扰控制[J]. 兵工学报, 2015, 36(6):987-993.
doi: 10.3969/j.issn.1000-1093.2015.06.004 |
|
doi: 10.3969/j.issn.1000-1093.2015.06.004 |
|
| [16] |
doi: 10.1016/j.neucom.2017.05.011 URL |
| [17] |
|
| [18] |
侯捷, 陈谋, 刘楠. 基于径向基函数神经网络与扩张状态观测器的无人直升机控制[J]. 控制理论与应用, 2021, 38(9): 1361-1371.
|
|
|
|
| [19] |
李彬, 徐怡杭, 罗杰. 采用残差神经网络的无人机遥控信号识别监测算法[J]. 西安交通大学学报, 2021, 55(12):146-154.
|
|
|
|
| [20] |
doi: 10.1115/1.3426923 URL |
| [21] |
|
| [22] |
doi: 10.1016/j.fss.2008.03.021 URL |
| [23] |
陈强, 丁科新, 南余荣. 带有输出约束的柔性关节机械臂预设性能自适应控制[J]. 控制与决策, 2021, 36(2):387-394.
|
|
|
| [1] | 王尔烈,王帅,皮大伟,王洪亮,王显会,谢伯元. 某纯电驱动重载车辆能耗预测模型[J]. 兵工学报, 2024, 45(4): 1229-1236. |
| [2] | 刘梦真, 黄广炎, 张宏, 周宏元, 刘思宇. 小样本驱动特征分段网络的防护材料折痕检测[J]. 兵工学报, 2024, 45(3): 963-974. |
| [3] | 鲍丹, 卫俞凯, 金鑫, 侯保林. 考虑输出约束和输入饱和的弹仓自适应控制[J]. 兵工学报, 2024, 45(3): 789-797. |
| [4] | 秦国华, 娄维达, 林锋, 徐勇. 基于Cotes求积法和神经网络的稳定域判断及铣削参数优化新方法[J]. 兵工学报, 2024, 45(2): 516-526. |
| [5] | 吕卫民, 孙晨峰, 任立坤, 赵杰, 李永强. 一种基于TCN-LGBM的航空发动机气路故障诊断方法[J]. 兵工学报, 2024, 45(1): 253-263. |
| [6] | 刘畅, 雷红波, 林时尧, 范世鹏, 王江. 基于多模型网络的激光末制导炮弹诸元解算方法[J]. 兵工学报, 2023, 44(9): 2745-2755. |
| [7] | 张凯歌, 卢志刚, 聂天常, 李志伟, 郭宇强. 面向无人装备的智能边缘计算软技术分析[J]. 兵工学报, 2023, 44(9): 2611-2621. |
| [8] | 刘冰, 郝新红, 周文, 杨瑾. 基于BAS-BPNN的调频无线电引信目标与扫频干扰识别方法[J]. 兵工学报, 2023, 44(8): 2391-2403. |
| [9] | 周宇, 曹荣刚, 栗苹, 马啸. 一种用于外场试验图像的引信炸点检测方法[J]. 兵工学报, 2023, 44(8): 2453-2464. |
| [10] | 吴礼洋, 呙鹏程, 刘超, 李文强. 基于注意力机制增强残差网络的雷达信号调制类型识别[J]. 兵工学报, 2023, 44(8): 2310-2318. |
| [11] | 解宝琦, 李英顺, 王德彪, 隋欢欢. 一种坦克炮长瞄准镜系统状态评估的方法[J]. 兵工学报, 2023, 44(8): 2414-2423. |
| [12] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [13] | 华英杰, 刘晶, 邵玉斌, 朵琳. 面向战场环境下的语种识别[J]. 兵工学报, 2023, 44(7): 2197-2206. |
| [14] | 何锦成, 韩永成, 张闻文, 何伟基, 陈钱. 基于通道校正卷积的真彩色微光图像增强[J]. 兵工学报, 2023, 44(6): 1643-1654. |
| [15] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4