
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (8): 2207-2223.doi: 10.12382/bgxb.2022.0247
王孟阳1,2, 张栋1,2,*( ), 唐硕1,2, 许斌3, 赵军民4
), 唐硕1,2, 许斌3, 赵军民4
收稿日期:2022-04-11
上线日期:2023-08-30
通讯作者:
基金资助:
WANG Mengyang1,2, ZHANG Dong1,2,*(), TANG Shuo1,2, XU Bin3, ZHAO Junmin4
Received:2022-04-11
Online:2023-08-30
摘要:
针对复杂战场环境下无人集群任务规划所面临的高动态性、强不确定性以及多约束问题,提出一种基于动态联盟策略的分布式在线任务规划方法。描述无人机集群动态任务规划的典型场景,建立了异构无人机集群的多约束分布式任务规划数学模型;设计考虑集群动态拓扑约束的任务联盟组建策略,提出耦合Dubins航迹规划的改进蚁群算法,实现多约束强不确定动态任务规划问题的在线求解;构建异构无人机集群察打评一体的任务仿真场景,通过数字仿真以及虚实结合的半实物仿真技术验证所提出的策略和算法的有效性。研究结果表明:所提方法在动态任务规划过程中能够在损失较少任务完成时间的前提下可获得较优的系统效能,对于后续研究工作进一步走向工程化应用具有一定意义。
中图分类号:
王孟阳, 张栋, 唐硕, 许斌, 赵军民. 基于动态联盟策略的无人机集群在线任务规划方法[J]. 兵工学报, 2023, 44(8): 2207-2223.
WANG Mengyang, ZHANG Dong, TANG Shuo, XU Bin, ZHAO Junmin. UAV Swarm On-line Mission Planning Method Based on Dynamic Allocation Strategy[J]. Acta Armamentarii, 2023, 44(8): 2207-2223.
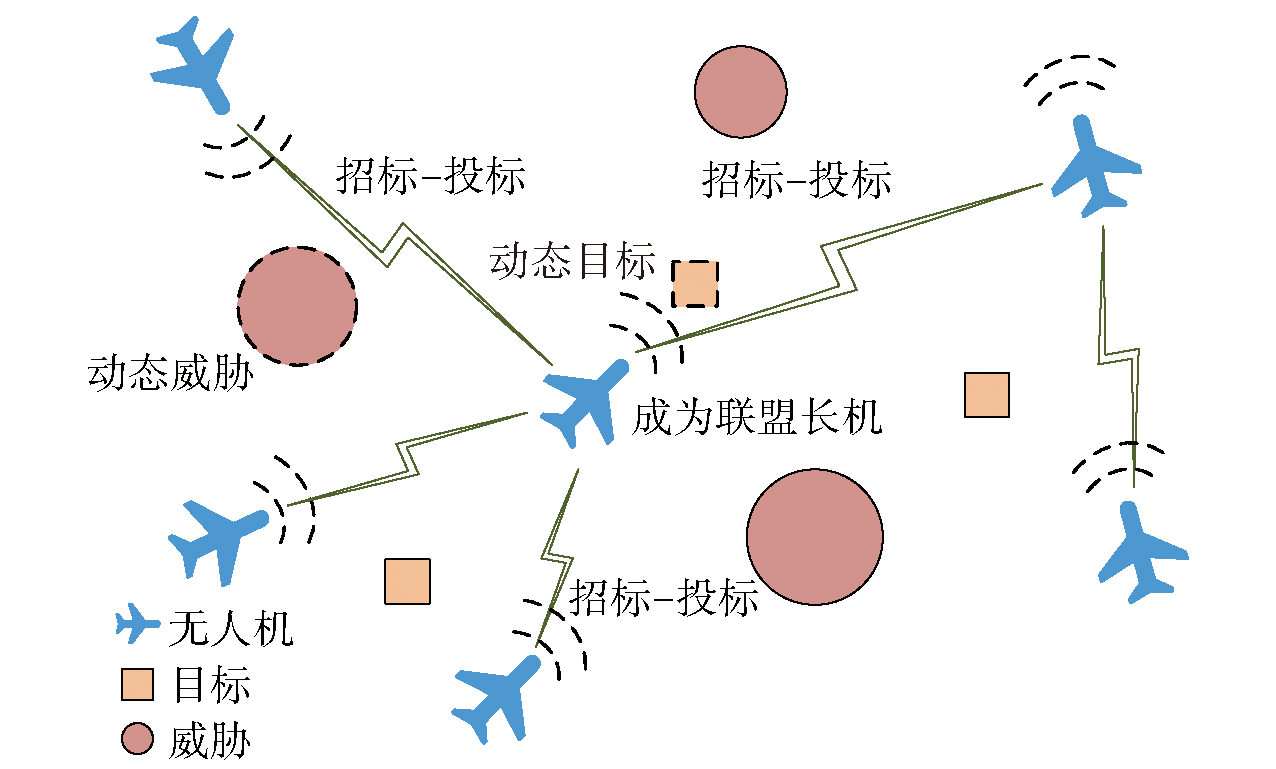
图1 UAV集群协同动态任务示意图
Fig.1 Diagram of UAV swarm cooperative dynamic mission
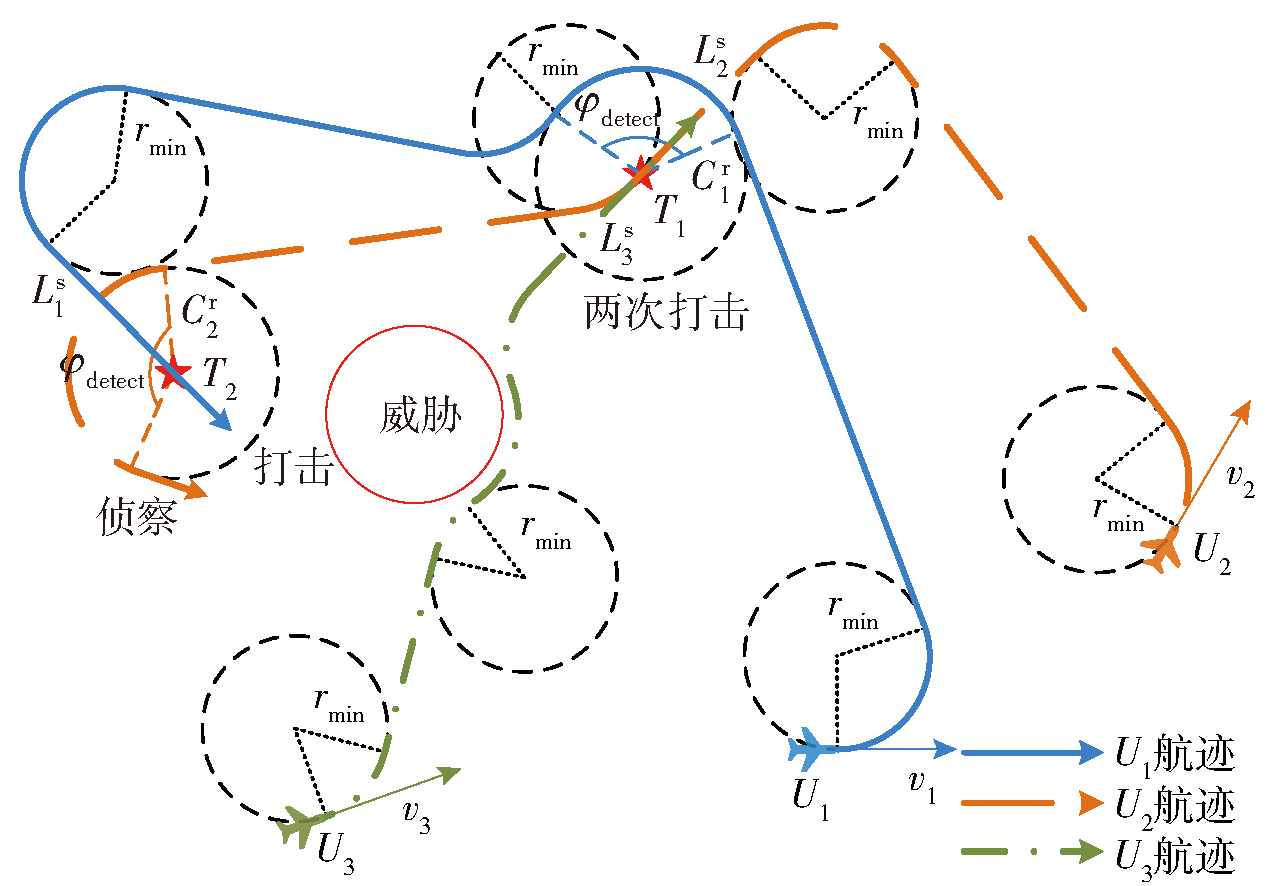
图2 航迹约束的几何表示
Fig.2 Geometric representation of trajectory constraints
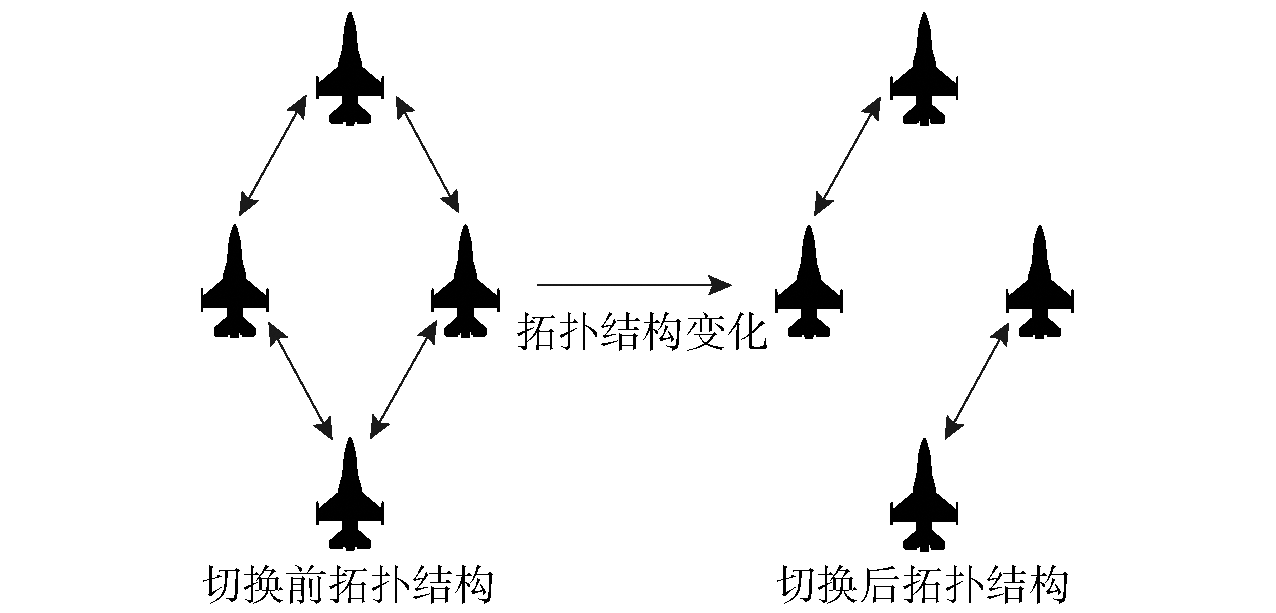
图3 网络通信拓扑
Fig.3 Network communication topology
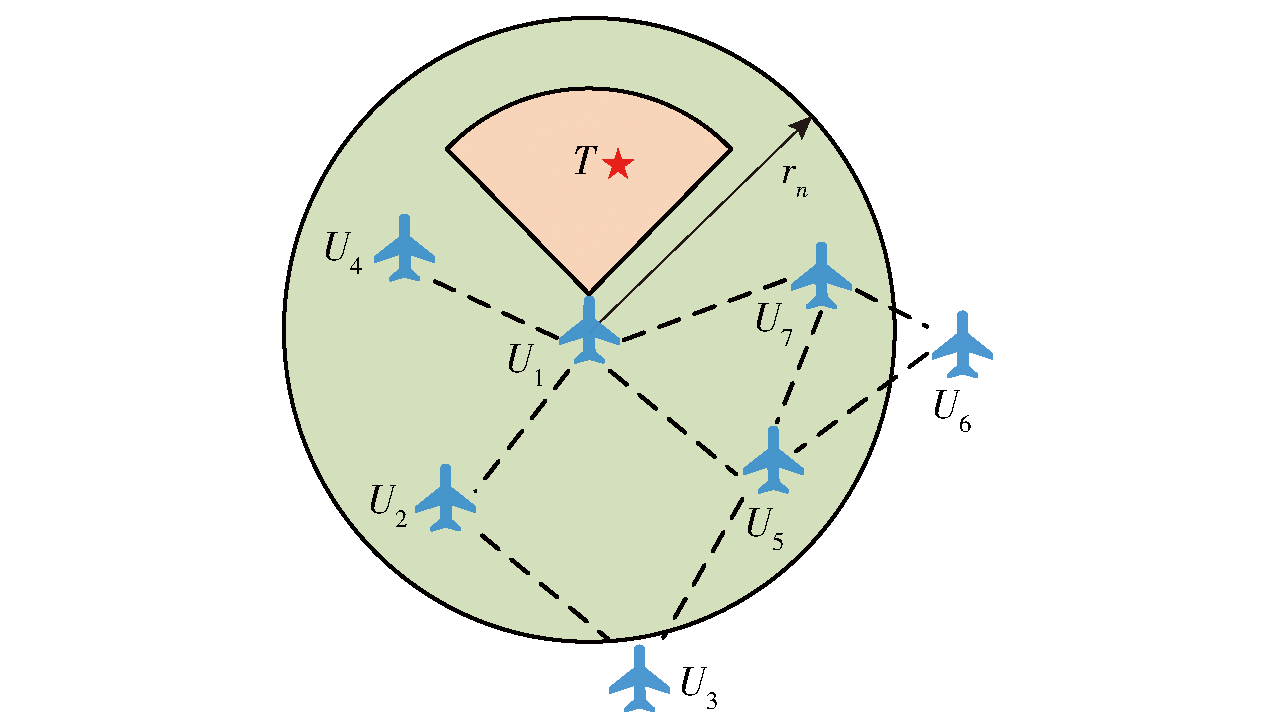
图4 UAV集群的通信示意图
Fig.4 Diagram of UAV swarm communication
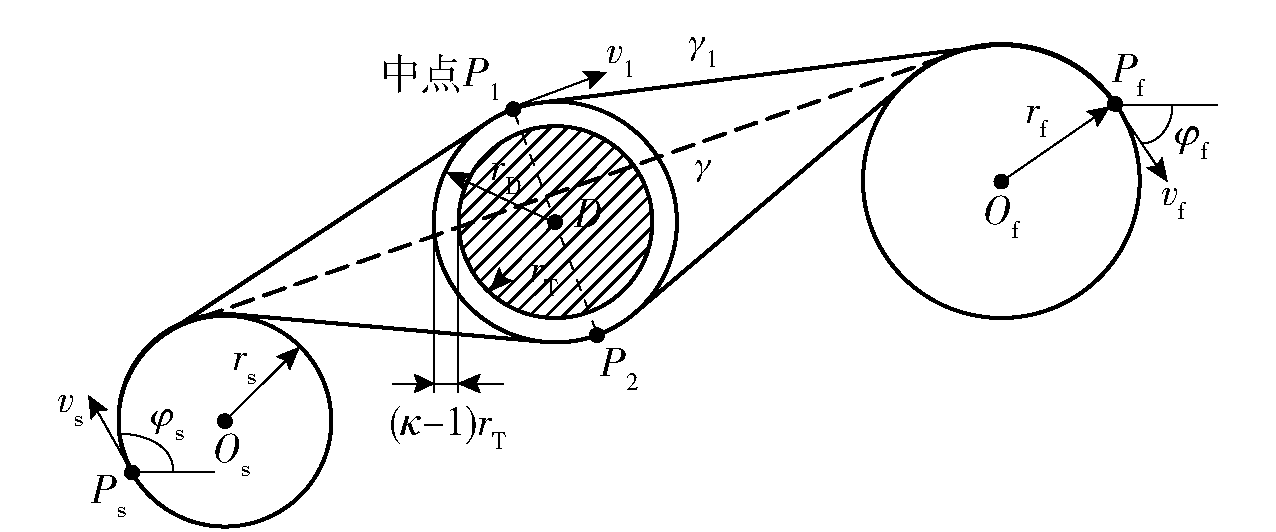
图5 威胁规避路径示意图
Fig.5 Diagram of threat avoidance path
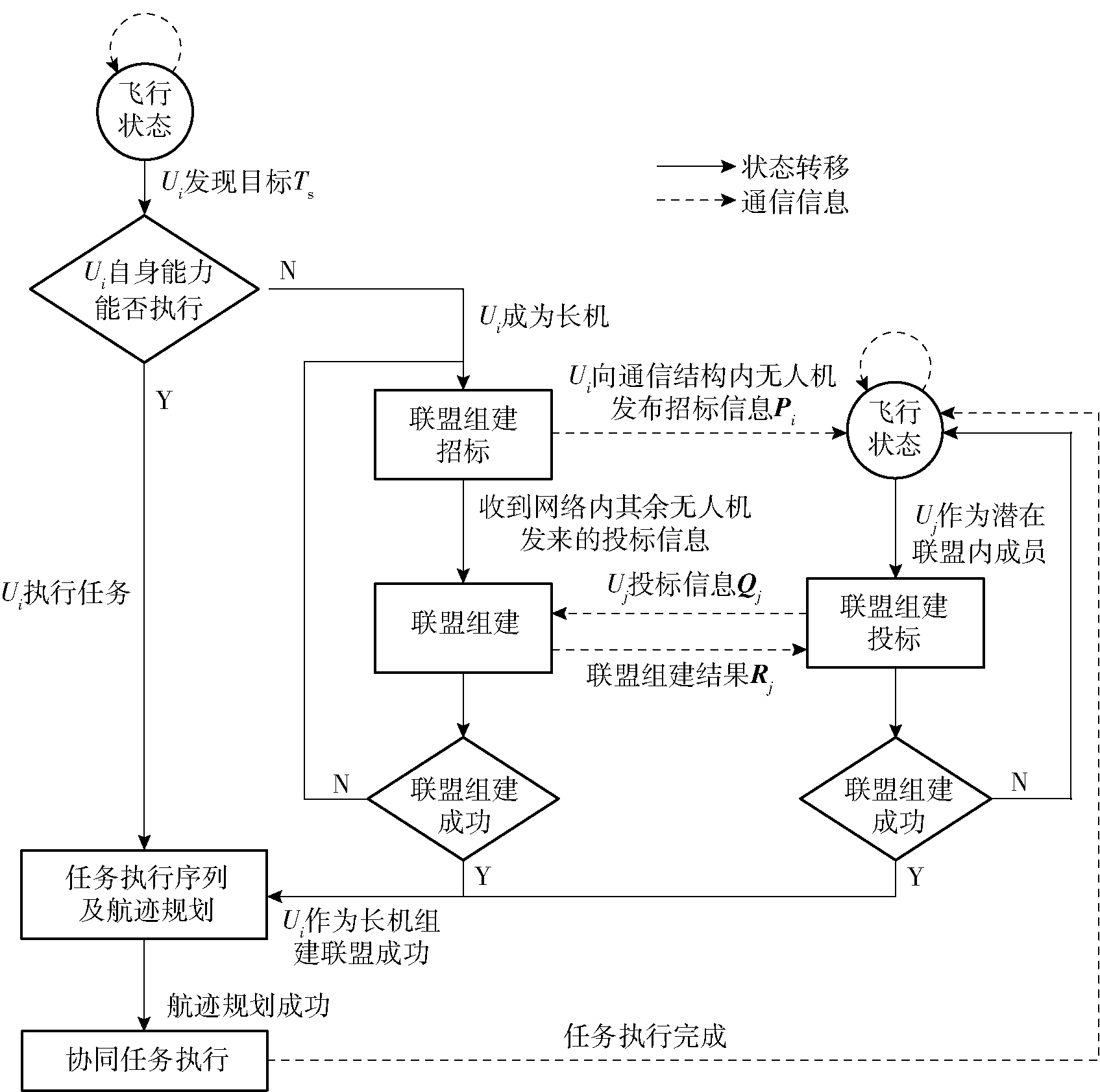
图6 状态及通信转移规则
Fig.6 Status and communication transition rule
| UAV 编号 | 初始位置/m | 最大 航程/m | 飞行速度/ (m·s-1) | 任务能力 | 打击载 荷数量 |
|---|---|---|---|---|---|
| U1 | (2200,2000,300) | 18000 | 50 | (R,S,E) | 2 |
| U2 | (4000,1900,300) | 18000 | 50 | (R,S,E) | 2 |
| U3 | (2500,5000,300) | 18000 | 50 | (R,S,E) | 2 |
| U4 | (3000,5500,300) | 18000 | 50 | (R,S,E) | 2 |
| U5 | (4000,4000,300) | 18000 | 50 | (R,S,E) | 2 |
| U6 | (5000,4500,300) | 18000 | 50 | (R,S,E) | 2 |
| U7 | (6500,3000,300) | 18000 | 50 | (R,S,E) | 1 |
| U8 | (5800,2300,300) | 18000 | 50 | (R,S,E) | 1 |
| U9 | (5200,3800,300) | 18000 | 50 | (R,S,E) | 1 |
| U10 | (6700,4200,300) | 18000 | 50 | (R,S,E) | 1 |
| U11 | (5500,2000,300) | 18000 | 50 | (R,S,E) | 1 |
| U12 | (5000,1000,500) | 26000 | 60 | (S) | 4 |
| U13 | (1000,1000,500) | 26000 | 60 | (S) | 4 |
| U14 | (6000,6000,500) | 26000 | 60 | (S) | 4 |
| U15 | (5900,6500,500) | 26000 | 60 | (S) | 4 |
| U16 | (2800,2000,500) | 26000 | 60 | (S) | 4 |
| U17 | (1600,1600,500) | 26000 | 60 | (S) | 4 |
| U18 | (3000,3050,500) | 26000 | 60 | (S) | 4 |
| U19 | (2500,2800,500) | 26000 | 60 | (S) | 4 |
| U20 | (5600,5800,500) | 26000 | 60 | (S) | 4 |
| U21 | (1800,3550,500) | 26000 | 60 | (S) | 4 |
| U22 | (2800,2100,500) | 26000 | 60 | (S) | 4 |
| U23 | (6000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U24 | (1000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U25 | (8000,7000,400) | 20000 | 50 | (R,E) | 0 |
| U26 | (1500,3800,400) | 20000 | 50 | (R,E) | 0 |
| U27 | (3000,4500,400) | 20000 | 50 | (R,E) | 0 |
| U28 | (3000,2800,400) | 20000 | 50 | (R,E) | 0 |
| U29 | (2800,4000,400) | 20000 | 50 | (R,E) | 0 |
| U30 | (3800,2100,400) | 20000 | 50 | (R,E) | 0 |
| U31 | (2200,2500,400) | 20000 | 50 | (R,E) | 0 |
| U32 | (2800,1800,400) | 20000 | 50 | (R,E) | 0 |
表1 初始时刻各UAV的信息
Table 1 Initial information of each UAV
| UAV 编号 | 初始位置/m | 最大 航程/m | 飞行速度/ (m·s-1) | 任务能力 | 打击载 荷数量 |
|---|---|---|---|---|---|
| U1 | (2200,2000,300) | 18000 | 50 | (R,S,E) | 2 |
| U2 | (4000,1900,300) | 18000 | 50 | (R,S,E) | 2 |
| U3 | (2500,5000,300) | 18000 | 50 | (R,S,E) | 2 |
| U4 | (3000,5500,300) | 18000 | 50 | (R,S,E) | 2 |
| U5 | (4000,4000,300) | 18000 | 50 | (R,S,E) | 2 |
| U6 | (5000,4500,300) | 18000 | 50 | (R,S,E) | 2 |
| U7 | (6500,3000,300) | 18000 | 50 | (R,S,E) | 1 |
| U8 | (5800,2300,300) | 18000 | 50 | (R,S,E) | 1 |
| U9 | (5200,3800,300) | 18000 | 50 | (R,S,E) | 1 |
| U10 | (6700,4200,300) | 18000 | 50 | (R,S,E) | 1 |
| U11 | (5500,2000,300) | 18000 | 50 | (R,S,E) | 1 |
| U12 | (5000,1000,500) | 26000 | 60 | (S) | 4 |
| U13 | (1000,1000,500) | 26000 | 60 | (S) | 4 |
| U14 | (6000,6000,500) | 26000 | 60 | (S) | 4 |
| U15 | (5900,6500,500) | 26000 | 60 | (S) | 4 |
| U16 | (2800,2000,500) | 26000 | 60 | (S) | 4 |
| U17 | (1600,1600,500) | 26000 | 60 | (S) | 4 |
| U18 | (3000,3050,500) | 26000 | 60 | (S) | 4 |
| U19 | (2500,2800,500) | 26000 | 60 | (S) | 4 |
| U20 | (5600,5800,500) | 26000 | 60 | (S) | 4 |
| U21 | (1800,3550,500) | 26000 | 60 | (S) | 4 |
| U22 | (2800,2100,500) | 26000 | 60 | (S) | 4 |
| U23 | (6000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U24 | (1000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U25 | (8000,7000,400) | 20000 | 50 | (R,E) | 0 |
| U26 | (1500,3800,400) | 20000 | 50 | (R,E) | 0 |
| U27 | (3000,4500,400) | 20000 | 50 | (R,E) | 0 |
| U28 | (3000,2800,400) | 20000 | 50 | (R,E) | 0 |
| U29 | (2800,4000,400) | 20000 | 50 | (R,E) | 0 |
| U30 | (3800,2100,400) | 20000 | 50 | (R,E) | 0 |
| U31 | (2200,2500,400) | 20000 | 50 | (R,E) | 0 |
| U32 | (2800,1800,400) | 20000 | 50 | (R,E) | 0 |
| 目标编号 | 初始位置/m | 待执行任务列表 | 侦察时间/s |
|---|---|---|---|
| 1 | (3500,2800,1) | (R, S, E) | 20 |
| 2 | (1000,500,1) | (R, S, E) | 30 |
| 3 | (4500,5000,1) | (R, S, E) | 30 |
表2 初始时刻各目标的信息
Table 2 Initial information of each target
| 目标编号 | 初始位置/m | 待执行任务列表 | 侦察时间/s |
|---|---|---|---|
| 1 | (3500,2800,1) | (R, S, E) | 20 |
| 2 | (1000,500,1) | (R, S, E) | 30 |
| 3 | (4500,5000,1) | (R, S, E) | 30 |
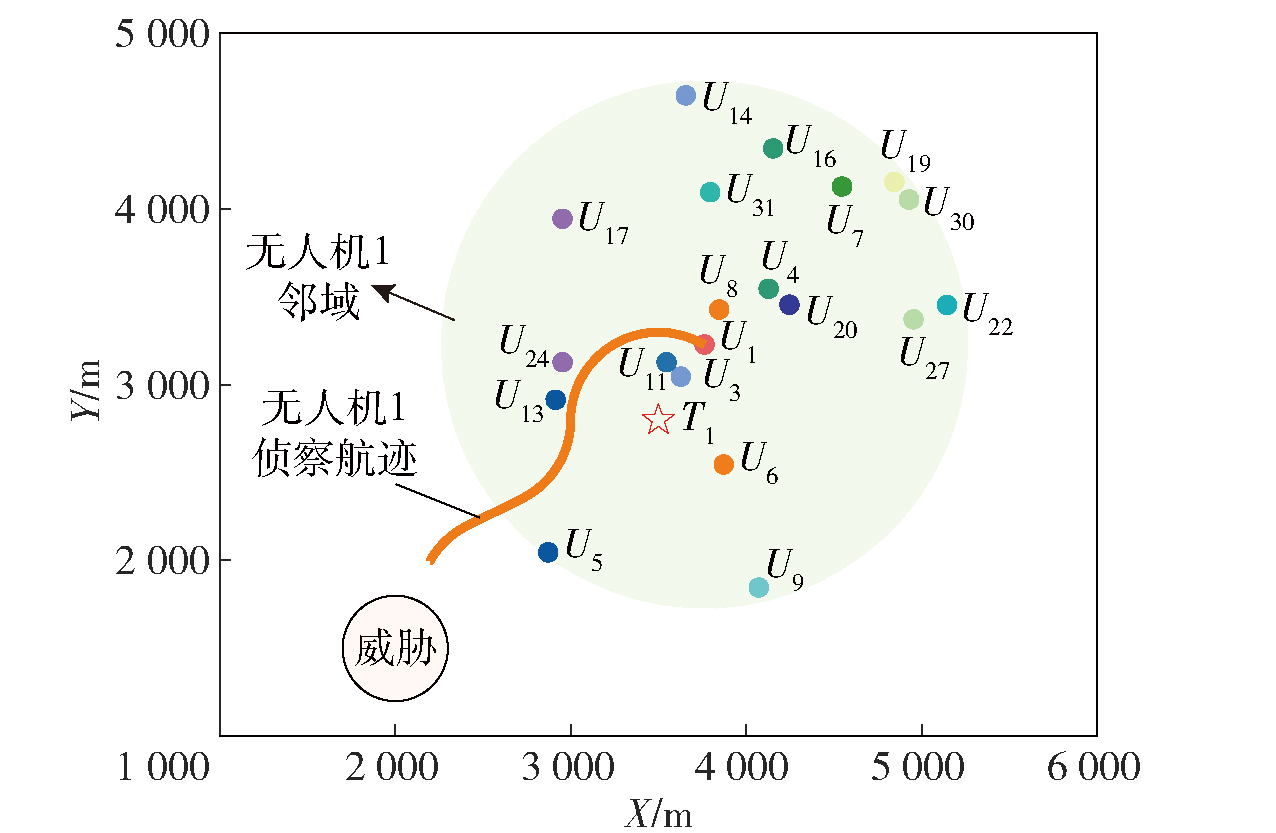
图7 U1招标状态
Fig.7 Tender status of U1
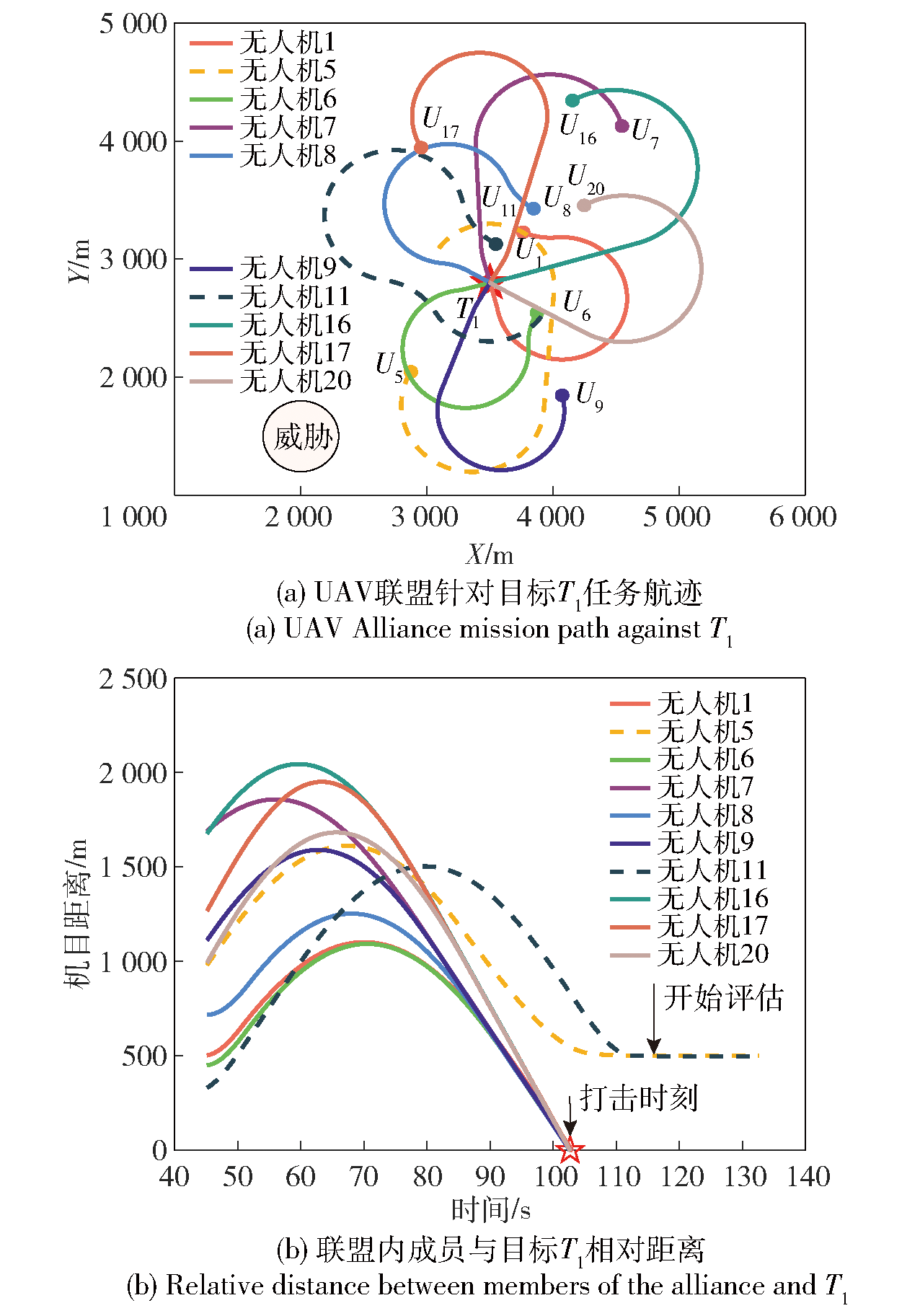
图8 t=43.92s时UAV联盟针对目标T1的任务规划结果
Fig.8 At t=43.92s, the mission planning result of UAV alliance for target T1

图9 t=54.23s时UAV联盟针对目标T3的任务规划结果
Fig.9 At t=54.23s, the mission planning result of UAV alliance for target T3
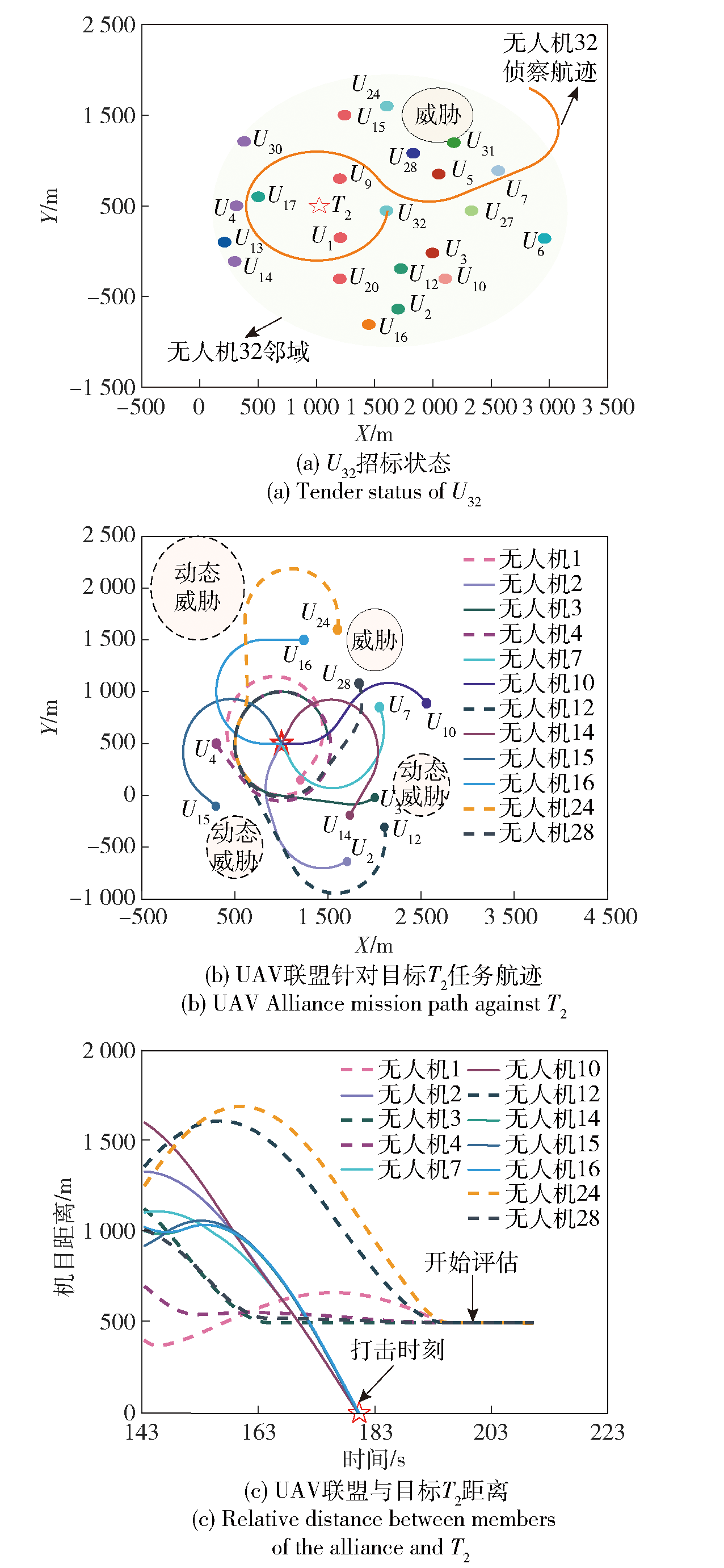
图10 t=142.28s时UAV联盟针对目标T2的任务 规划结果
Fig.10 At t=142.28s, the mission planning result of UAV alliance for target T2
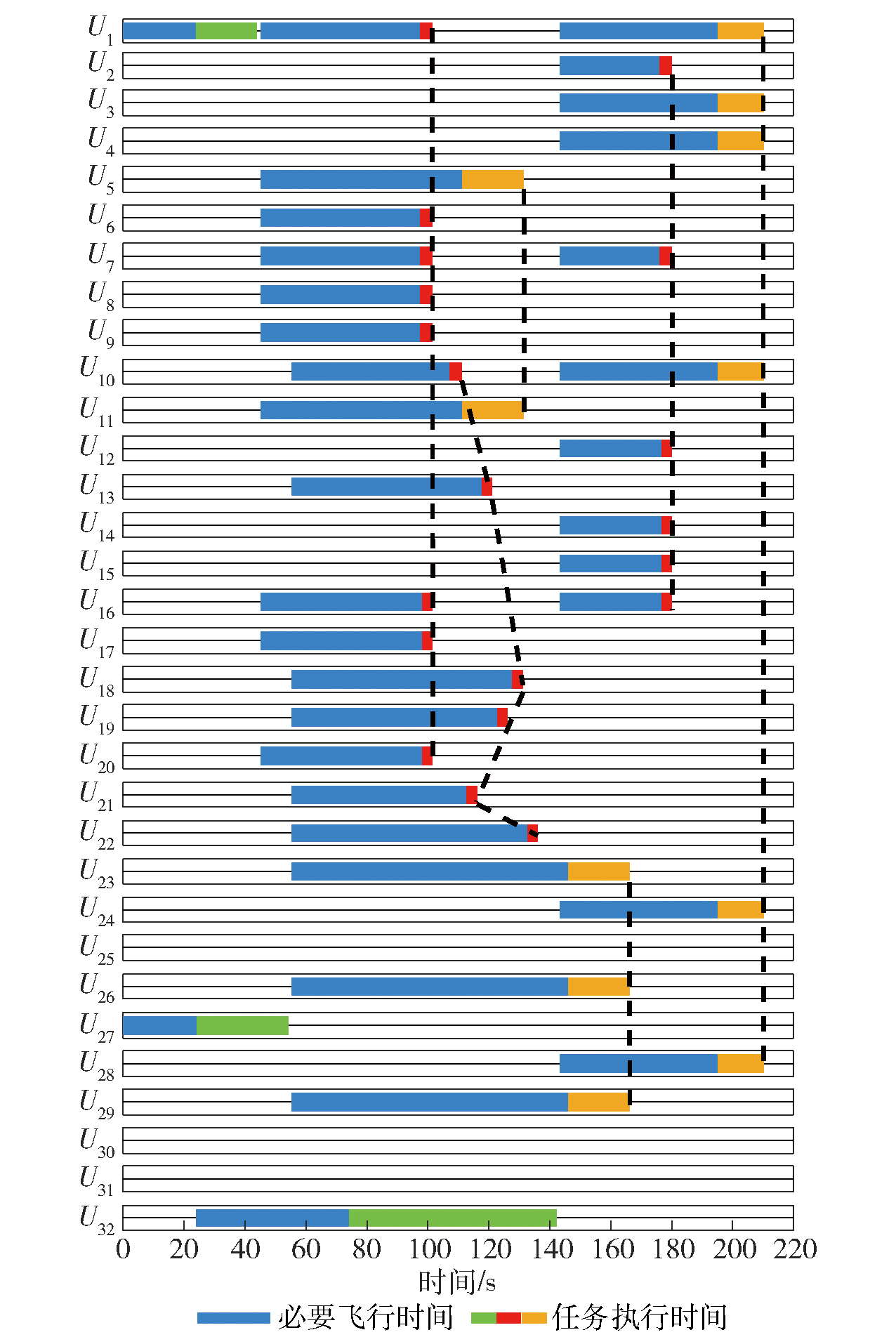
图11 UAV集群任务序列
Fig.11 Mission sequence of UAV swarm
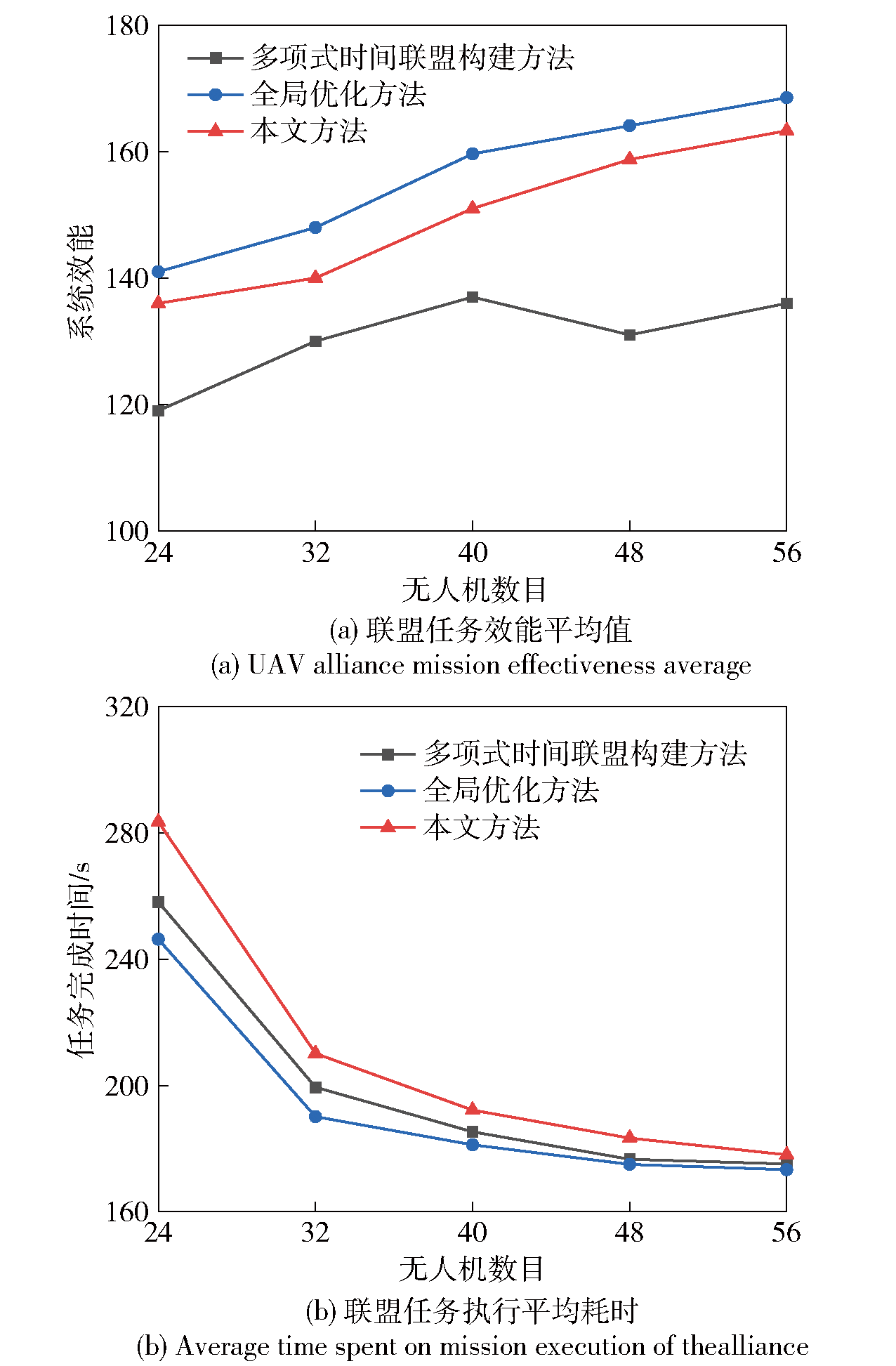
图12 UAV数目变化时联盟组建算法性能对比
Fig.12 Performance comparison of three alliance formation-lgorithms with increasing number of UAV
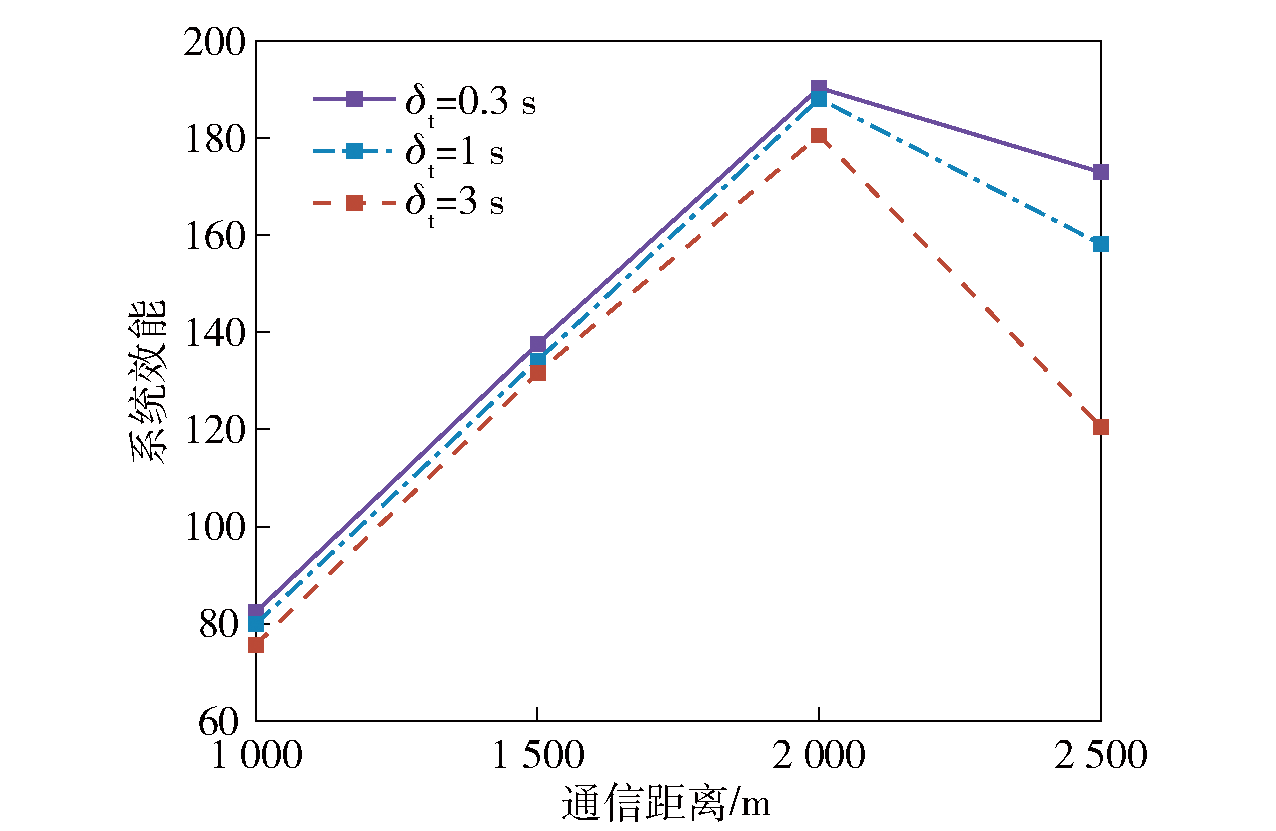
图13 通信约束对任务效能方法的影响
Fig.13 Influence of communication constraints on the proposed mission effectiveness method

图14 虚实结合半实物仿真实验布置
Fig.14 Hardware-in-the-loop (HIL) simulation with virtual and real experimental arrangement
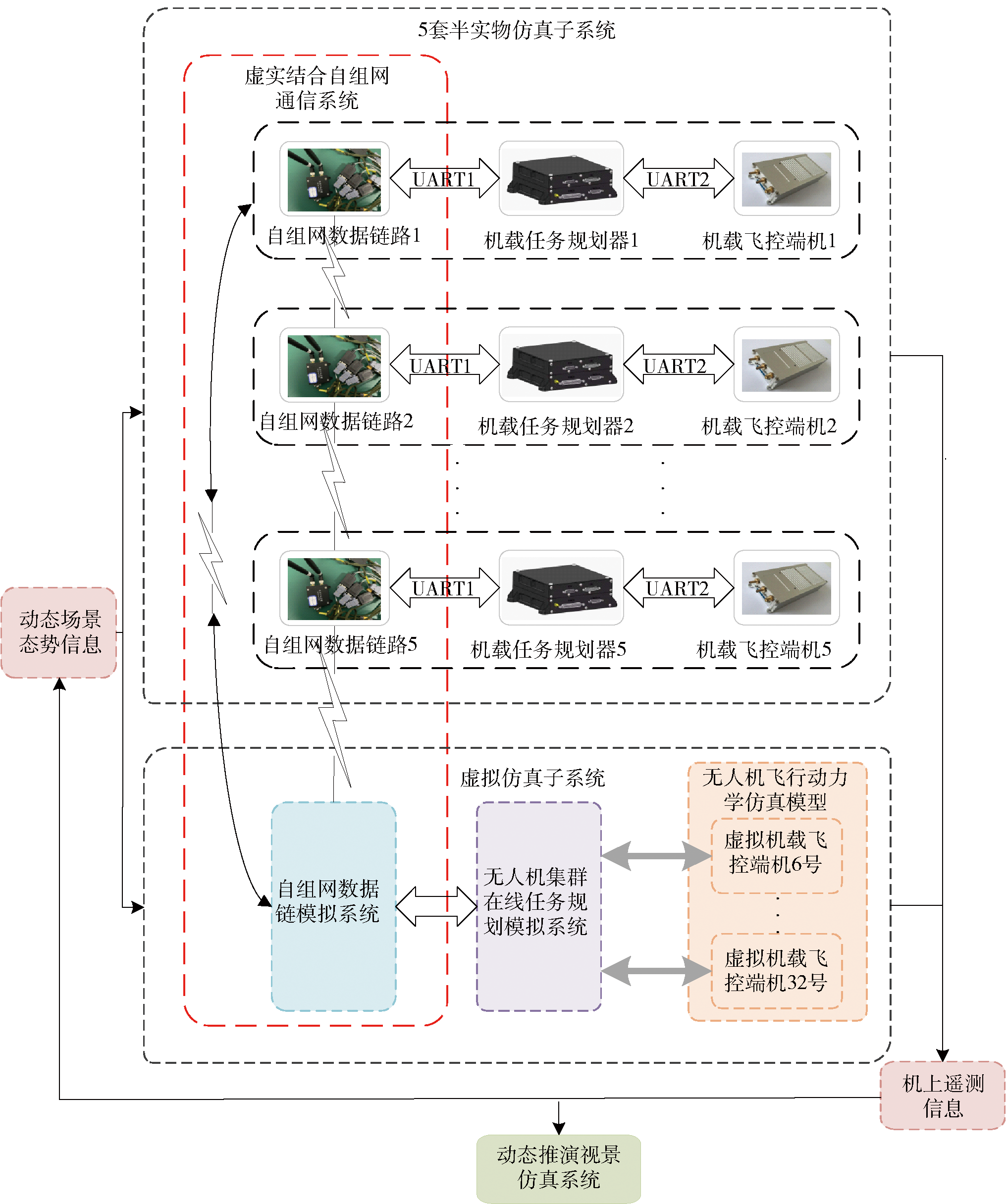
图15 集群虚实结合半实物仿真系统示意图
Fig.15 Schematic diagram of the UAV swarm’s HIL simulation with virtual and real systems

图16 半实物仿真飞行效果二维展示
Fig.16 Two-dimensional display of HIL simulation flight effects
| [1] |
贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(增刊1): 4-14.
|
|
|
|
| [2] |
|
| [3] |
doi: 10.1016/j.swevo.2016.12.005 URL |
| [4] |
甄子洋, 江驹, 孙绍山, 等. 无人机集群作战协同控制与决策[M]. 北京: 国防工业出版社, 2022: 1-35.
|
|
|
|
| [5] |
贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2019, 43(1): 99-111.
|
|
|
|
| [6] |
doi: 10.1016/j.endm.2018.03.018 URL |
| [7] |
|
| [8] |
doi: 10.1002/rnc.v30.14 URL |
| [9] |
doi: 10.1109/TMC.7755 URL |
| [10] |
朱云冲, 梁彦刚, 黎克波, 等. 基于PSO和RRT的智能弹群任务分配算法[J/OL]. 航空学报, 2022.(2022-07-12) [2022-08-22]. http://kns.cnki.net/kcms/detail/11.1929.V.20220710.1634.028.html
|
|
|
|
| [11] |
李桂亮, 毕海洋, 洪雪健, 等. 基于DE-DPSO-GT-SA算法的协同多任务分配[J]. 北京航空航天大学学报, 2021, 47(1): 90-96.
|
|
|
|
| [12] |
doi: 10.1109/TAES.2018.2831138 URL |
| [13] |
doi: 10.1016/j.cja.2017.09.005 URL |
| [14] |
doi: 10.1016/j.ast.2018.01.025 URL |
| [15] |
|
| [16] |
doi: 10.1109/ACCESS.2019.2952468 |
| [17] |
doi: 10.1109/Access.6287639 URL |
| [18] |
doi: 10.1007/s42405-019-00205-1 |
| [19] |
|
| [20] |
刘重, 高晓光, 符小卫, 等. 未知环境下异构多无人机协同搜索打击中的联盟组建[J]. 兵工学报, 2015, 36(12): 2284-2297.
doi: 10.3969/j.issn.1000-1093.2015.12.011 |
|
|
|
| [21] |
符小卫, 魏可, 李斌, 等. 基于联盟的无人机集群编队控制方法[J]. 系统工程与电子技术, 2019, 41(11): 2559-2572.
|
|
|
|
| [22] |
doi: 10.1016/j.ast.2021.107054 URL |
| [23] |
|
| [24] |
陈璞, 严飞, 刘钊, 等. 通信约束下异构多无人机任务分配方法[J]. 航空学报, 2021, 42(8): 313-326.
|
|
|
|
| [25] |
doi: 10.1016/j.cja.2013.07.009 URL |
| [26] |
doi: 10.1016/j.ast.2018.05.039 URL |
| [27] |
吴钟博, 易建强. 无人机编队支撑网络的协同通信中继策略[J]. 航空学报, 2020, 41(增刊2): 187-194.
|
|
|
|
| [28] |
陈清阳, 辛宏博, 王玉杰, 等. 一种多机协同打击的快速航迹规划方法[J]. 北京航空航天大学学报, 2019, 48(7):1145-1153.
|
|
|
|
| [29] |
苏菲, 陈岩, 沈林成. 基于蚁群算法的无人机协同多任务分配[J]. 航空学报, 2008, 29(增刊): 184-191.
|
|
|
| [1] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [2] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [5] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [6] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [7] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [8] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [9] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [10] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [11] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [12] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [13] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [14] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [15] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4