
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (4): 940-948.doi: 10.12382/bgxb.2021.0822
霍健1, 陈慧敏1,*( ), 马云飞1, 郭鹏宇1, 杨旭1, 孟祥盛2
), 马云飞1, 郭鹏宇1, 杨旭1, 孟祥盛2
收稿日期:2021-12-03
上线日期:2023-04-28
通讯作者:
HUO Jian1, CHEN Huimin1,*(), MA Yunfei1, GUO Pengyu1, YANG Xu1, MENG Xiangsheng2
Received:2021-12-03
Online:2023-04-28
摘要:
针对传统线阵激光雷达对地面目标识别准确率低的问题,设计一种基于MEMS激光雷达推扫成像点云识别算法。引入直通滤波和栅格分割算法缩减原始点云数据,有效提高算法的运算速度。结合MEMS激光雷达点云有序化处理方法,提出基于数学形态学的点云聚类算法,将去除地面后的点云分割为相互独立的点云簇。在此基础上使用自适应阈值的分布直方图去噪算法,去除点云簇周围的离群噪点。设计多特征复合判据,直接处理聚类去噪后的三维激光点云,实现对目标的准确识别。分析典型实验条件下的数据处理结果,识别准确率达到了94.9%,表明该方法具有良好的泛化能力和准确性。
霍健, 陈慧敏, 马云飞, 郭鹏宇, 杨旭, 孟祥盛. 基于MEMS激光雷达的车辆目标识别算法[J]. 兵工学报, 2023, 44(4): 940-948.
HUO Jian, CHEN Huimin, MA Yunfei, GUO Pengyu, YANG Xu, MENG Xiangsheng. Vehicle Target Recognition Algorithm Based on MEMS LiDAR[J]. Acta Armamentarii, 2023, 44(4): 940-948.
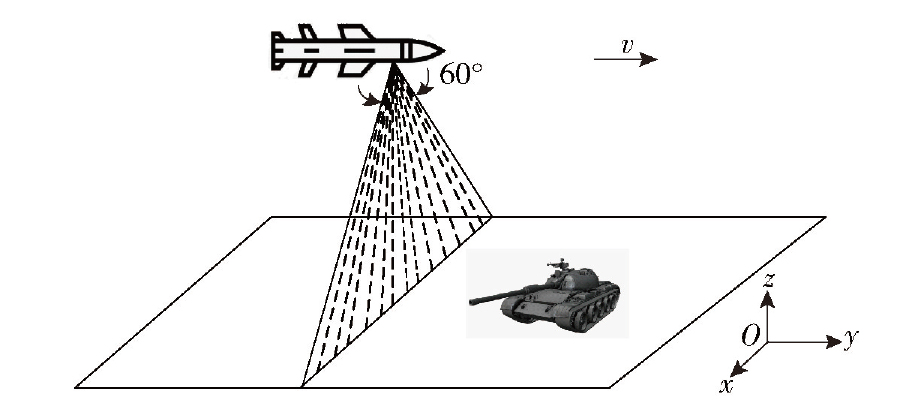
图1 弹载MEMS激光雷达工作原理示意图
Fig.1 Schematic diagram of missile borne MEMS LiDAR
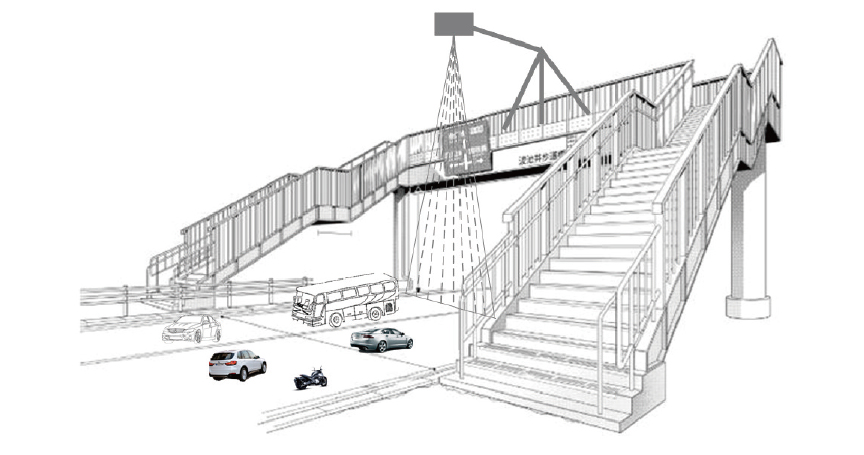
图2 等效实验场景图
Fig.2 Equivalent experimental scene
| 参数 | 数值 |
|---|---|
| 波长/nm | 905 |
| 最大探测距离/m | 75 |
| 测距精度/cm | 2 |
| 视场角/(°) | 60 |
| 角分辨率/(°) | 0.2 |
| 帧频/Hz | 360 |
表1 一维MEMS激光雷达性能参数
Table 1 Parameters of one-dimensional MEMS LiDAR
| 参数 | 数值 |
|---|---|
| 波长/nm | 905 |
| 最大探测距离/m | 75 |
| 测距精度/cm | 2 |
| 视场角/(°) | 60 |
| 角分辨率/(°) | 0.2 |
| 帧频/Hz | 360 |

图3 MEMS激光雷达和线阵激光雷达点云对比图
Fig.3 Comparison between MEMS LiDAR point cloud and linear array LiDAR point cloud

图4 直通滤波前后的点云对比图
Fig.4 Comparison of point cloud images before and after directly filtering

图5 点云分割前后对比
Fig.5 Comparison before and after ground points segmentation

图6 无序点云和有序点云的矩阵形式对比
Fig.6 Comparison of matrix formats of unorganized point cloud and organized point cloud
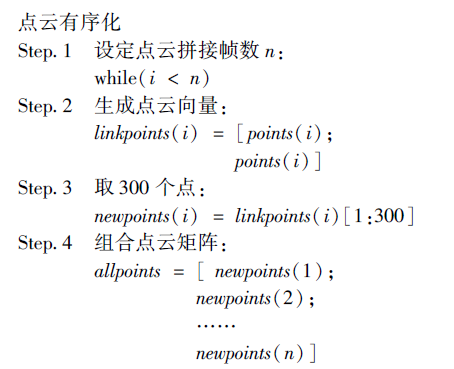
图7 点云有序化处理
Fig.7 Organized processing of point cloud
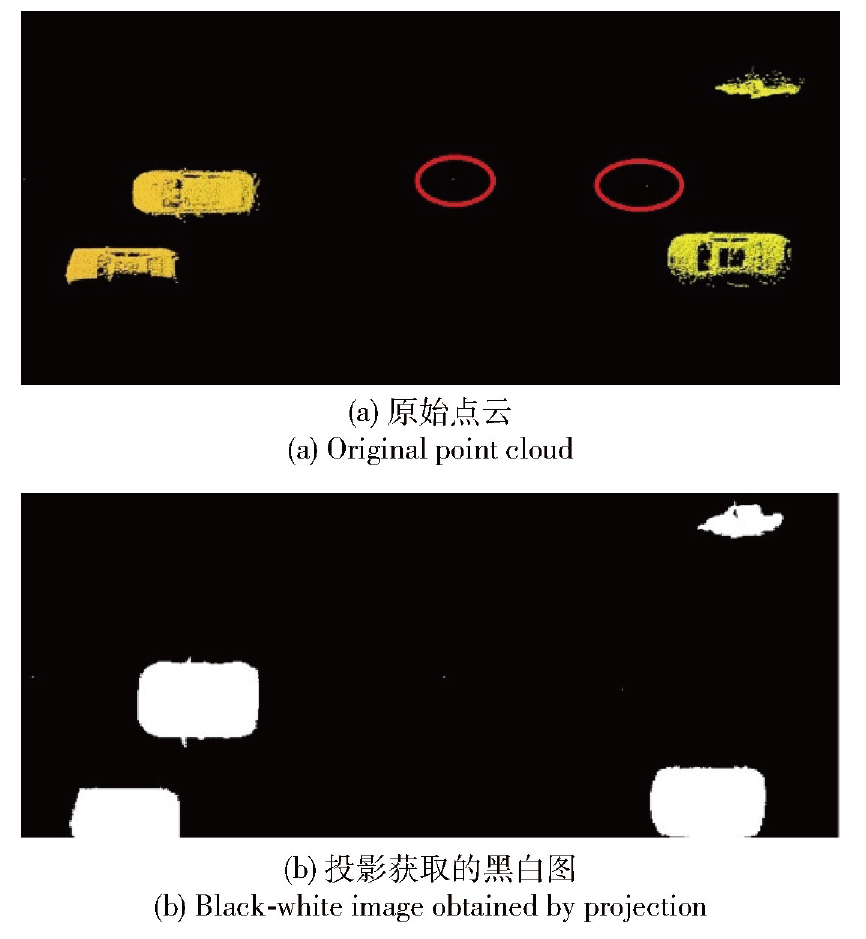
图8 原始点云图和黑白图对比
Fig.8 Comparison between original point cloud and black-white image

图9 开闭运算后的点云簇位置图
Fig.9 Position diagram of point cloud cluster after morphological operations
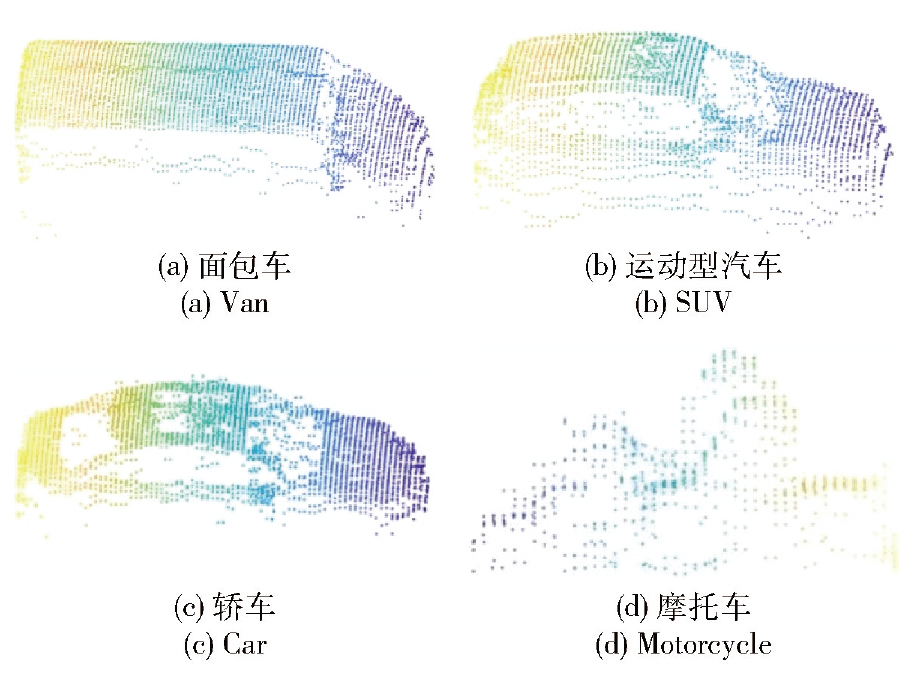
图10 聚类运算后提取的独立点云
Fig.10 Independent point cloud extracted after clustering operations
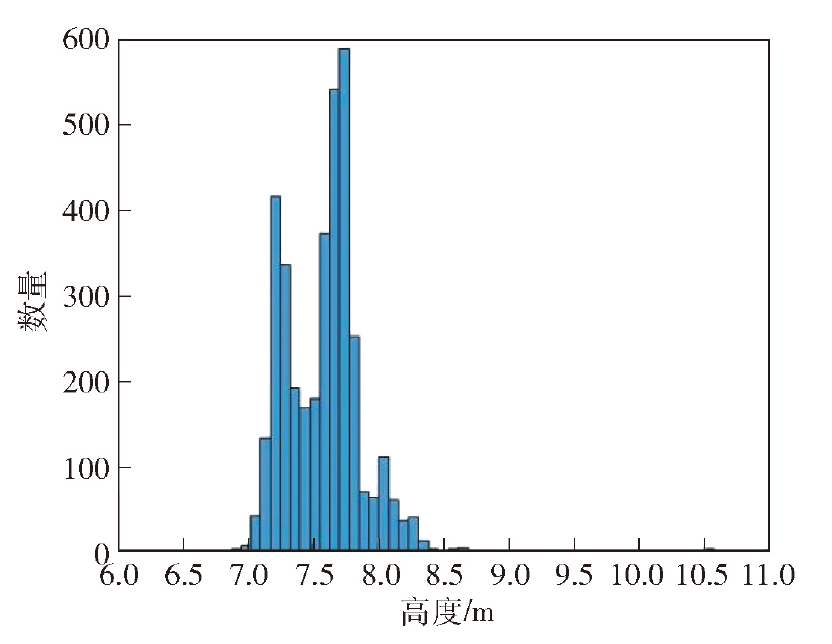
图11 点云目标的分布直方图
Fig.11 Distribution histogram of point cloud targets
| 编号 | 特征名称 | 维数 |
|---|---|---|
| 1 | 点云数量 | 1 |
| 2 | 点云外框尺寸 | 3 |
| 3 | 点云归一化坐标中心 | 3 |
| 4 | 点云空间离散值 | 6 |
| 5 | 点云三维协方差矩阵 | 9 |
| 6 | 点云三维协方差矩阵特征值 | 3 |
表2 点云特征参数
Table 2 Point cloud feature parameters
| 编号 | 特征名称 | 维数 |
|---|---|---|
| 1 | 点云数量 | 1 |
| 2 | 点云外框尺寸 | 3 |
| 3 | 点云归一化坐标中心 | 3 |
| 4 | 点云空间离散值 | 6 |
| 5 | 点云三维协方差矩阵 | 9 |
| 6 | 点云三维协方差矩阵特征值 | 3 |

图12 目标识别效果图
Fig.12 Effect drawing of target recognition
| 车辆数量及 误判数量 | 种类 | |||
|---|---|---|---|---|
| 私家车 | 公交车 | 摩托车 | 厢式车 | |
| 数量 | 542 | 11 | 43 | 30 |
| 误判数量 | 26 | 0 | 2 | 4 |
表3 实验采集的车辆数量
Table 3 Number of vehicles collected in the experiment
| 车辆数量及 误判数量 | 种类 | |||
|---|---|---|---|---|
| 私家车 | 公交车 | 摩托车 | 厢式车 | |
| 数量 | 542 | 11 | 43 | 30 |
| 误判数量 | 26 | 0 | 2 | 4 |
| [1] |
于加其, 杨树兴, 朱伯立. 弹载激光成像雷达距离像的目标提取技术[J]. 北京理工大学学报, 2016, 36(12):1279-1282.
|
|
|
|
| [2] |
徐国艳, 牛欢, 郭宸阳, 等. 基于三维激光点云的目标识别与跟踪研究[J]. 汽车工程, 2020, 42(1): 38-46.
|
|
|
|
| [3] |
武军安, 郭锐, 刘荣忠, 等. 末敏弹线阵激光雷达对地面装甲目标的提取方法[J]. 红外与激光工程, 2019, 48(3): 140-147.
|
|
|
|
| [4] |
党吉圣, 杨军. 多特征融合的三维模型识别与分割[J]. 西安电子科技大学学报, 2020, 47(4): 149-157.
|
|
|
|
| [5] |
冯发杰, 丁亚洲, 吏军平, 等. 使用显著性划分的机载激光雷达点云滤波[J]. 红外与激光工程, 2020, 49(8): 26-34.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
蒋罕寒, 郭锐, 武军安, 等. 高旋掠飞弹载激光雷达稀疏点云插值算法[J]. 弹箭与制导学报, 2021, 41(1): 120-123.
|
|
|
|
| [9] |
刘亚文, 张颖, 陈泉. 结合全景影像的车载街景点云数据增强方法[J]. 武汉大学学报(信息科学版), 2020, 45(7): 1015-1020.
|
|
|
|
| [10] |
张雨禾, 耿国华, 魏潇然, 等. 采用密度空间聚类的散乱点云特征提取方法[J]. 西安电子科技大学学报, 2017, 44(2): 114-120.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
陆军, 华博文, 朱波. 基于局部曲面特征直方图的点云识别[J]. 模式识别与人工智能, 2020, 33(10): 934-943.
doi: 10.16451/j.cnki.issn1003-6059.202010008 |
|
doi: 10.16451/j.cnki.issn1003-6059.202010008 |
|
| [14] |
邹子强, 刘星, 张雪峰. 弹载线阵扫描激光雷达的目标识别算法[J]. 探测与控制学报, 2019, 41(1): 43-47.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
郑壮壮, 曹万科, 邹渊, 等. 动态环境下无人地面车辆点云地图快速重定位方法[J]. 兵工学报, 2020, 41(8):1581-1589.
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
| [19] |
|
| [20] |
|
| [21] |
马振宇, 庞勇, 李增元, 等. 地基激光雷达森林近地面点云精细分类与倒木提取[J]. 遥感学报, 2019, 23(4):743-755.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1109/ACCESS.2021.3094307 URL |
| [1] | 袁艺,盖江涛,曾根,周广明,李训明,马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107. |
| [2] | 王尔烈,王帅,皮大伟,王洪亮,王显会,谢伯元. 某纯电驱动重载车辆能耗预测模型[J]. 兵工学报, 2024, 45(4): 1229-1236. |
| [3] | 宋晓茹, 刘康, 高嵩, 陈超波, 阎坤. 复杂战场环境下改进YOLOv5军事目标识别算法研究[J]. 兵工学报, 2024, 45(3): 934-947. |
| [4] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [5] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [6] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [7] | 肖万港, 周云波, 傅耀宇, 张明, 周军, 葛纪桃. 土壤对军用越野车辆机动性能影响分析[J]. 兵工学报, 2024, 45(1): 288-298. |
| [8] | 商显赫, 张付军, 吕航, 刘涛, 韩雪峰, 王密琪. 提升重型车辆起步性能协调控制策略[J]. 兵工学报, 2024, 45(1): 264-275. |
| [9] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [10] | 赵晓冬, 张洵颖. 基于YOLOv5的无人车自主目标识别优化算法[J]. 兵工学报, 2023, 44(9): 2732-2744. |
| [11] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [12] | 刘冰, 郝新红, 周文, 杨瑾. 基于BAS-BPNN的调频无线电引信目标与扫频干扰识别方法[J]. 兵工学报, 2023, 44(8): 2391-2403. |
| [13] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [14] | 连静, 丁荣琪, 李琳辉, 王雪成, 周雅夫. 基于图模型和注意力机制的车辆轨迹预测方法[J]. 兵工学报, 2023, 44(7): 2162-2170. |
| [15] | 李占龙, 张正, 姜稳稳, 刘琪, 任志曌, 王瑶, 宋勇. 磁环型准零刚度隔振系统动态特性[J]. 兵工学报, 2023, 44(6): 1784-1794. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4