
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (12): 4578-4588.doi: 10.12382/bgxb.2023.0919
Previous Articles Next Articles
WANG Xu1,2, GAO Xiaoyu3, HUANG Ying1,2,*( ), CUI Tao1, LUO Chengliang1
), CUI Tao1, LUO Chengliang1
Received:2023-09-12
Online:2024-02-19
Contact:
HUANG Ying
WANG Xu, GAO Xiaoyu, HUANG Ying, CUI Tao, LUO Chengliang. Power Coordinated Predictive Control of Hybrid Amphibious Vehicle with Model Mismatch[J]. Acta Armamentarii, 2024, 45(12): 4578-4588.
Add to citation manager EndNote|Ris|BibTeX
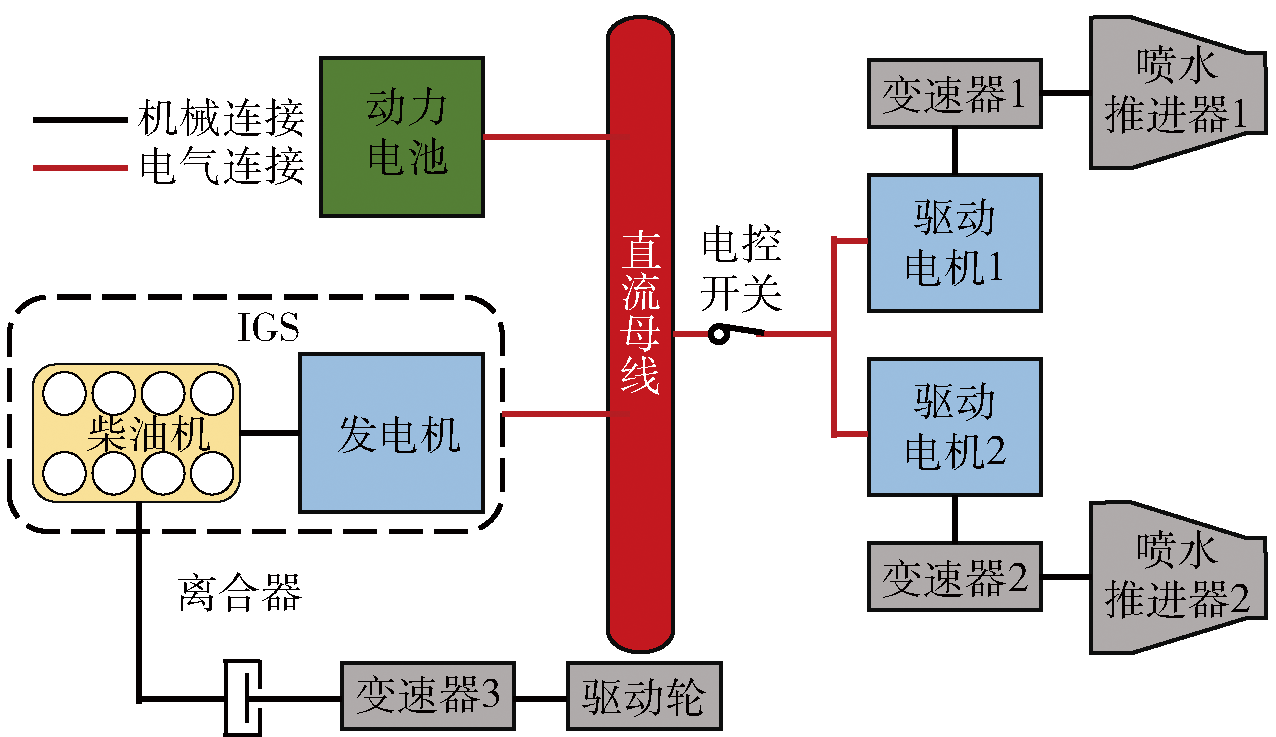
Fig.1 Hybrid amphibious vehicle configuration
| 参数 | 数值 |
|---|---|
| 整备质量/kg | 25000 |
| 长×宽×高/m | 8×3×2.1 |
| 主动轮半径/m | 0.62 |
| 滚动阻力系数 | 0.1 |
| 旋转质量换算系数 | 1.2 |
| 空气阻力系数 | 1 |
| 方形系数 | 0.8 |
| 变速器1挡速比 | 28.8 |
| 湿表面积/m2 | 46 |
| 吃水深度/m | 1.5 |
| 排水体积/m3 | 31.2 |
| 发动机额定功率/kW | 656 |
| 发动机最高转速/(r·min-1) | 2500 |
| 电池额定电压/V | 900 |
| 电池额定容量/(A·h) | 100 |
| 变速器2挡速比 | 12.0 |
Table 1 Parameters of vehicle and environment
| 参数 | 数值 |
|---|---|
| 整备质量/kg | 25000 |
| 长×宽×高/m | 8×3×2.1 |
| 主动轮半径/m | 0.62 |
| 滚动阻力系数 | 0.1 |
| 旋转质量换算系数 | 1.2 |
| 空气阻力系数 | 1 |
| 方形系数 | 0.8 |
| 变速器1挡速比 | 28.8 |
| 湿表面积/m2 | 46 |
| 吃水深度/m | 1.5 |
| 排水体积/m3 | 31.2 |
| 发动机额定功率/kW | 656 |
| 发动机最高转速/(r·min-1) | 2500 |
| 电池额定电压/V | 900 |
| 电池额定容量/(A·h) | 100 |
| 变速器2挡速比 | 12.0 |
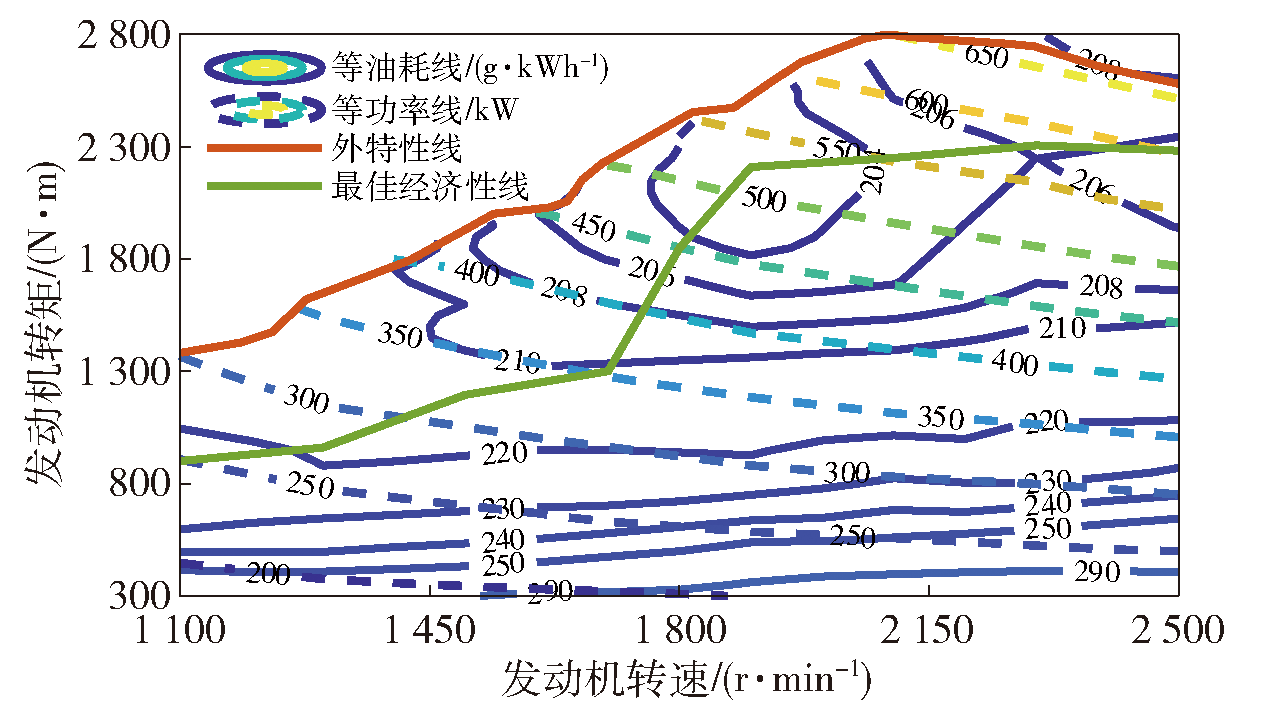
Fig.2 Engine universal characteristic curve

Fig.3 MPCstrategy with ELM-based error correction
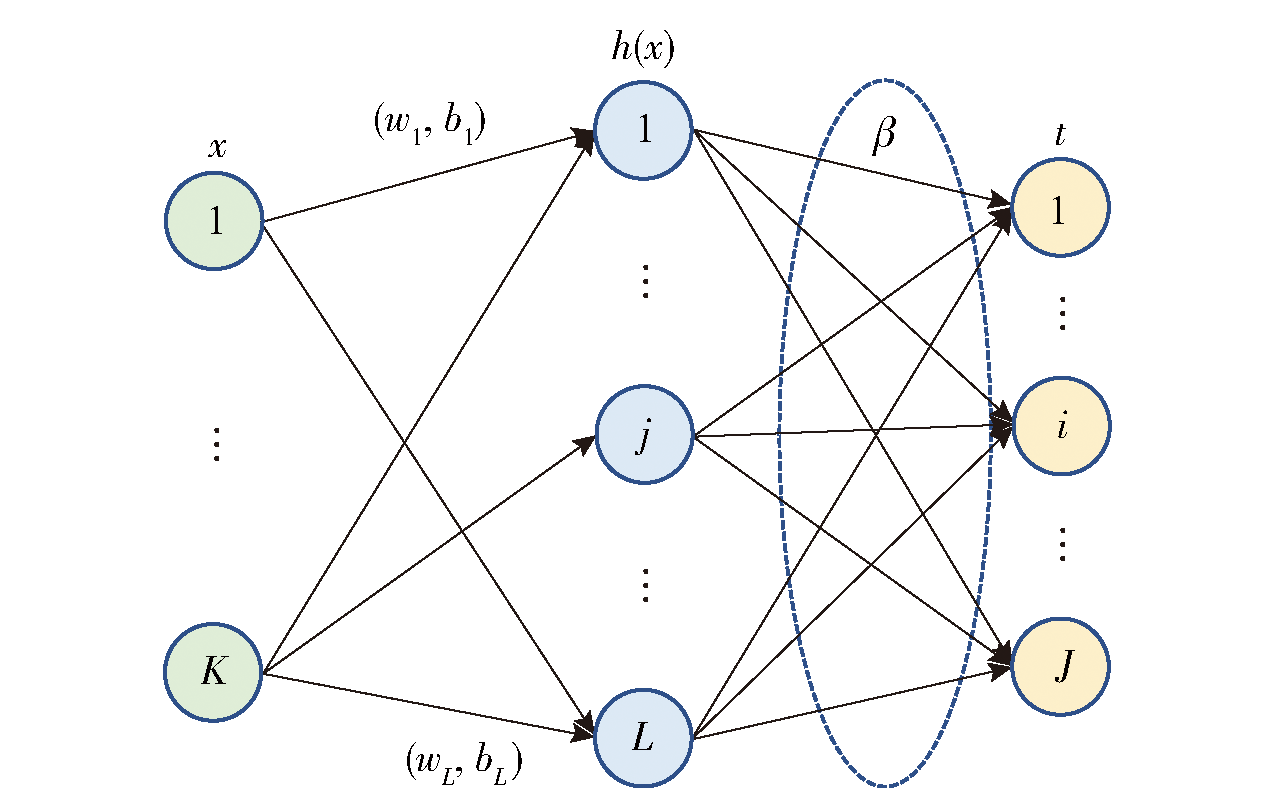
Fig.4 Structure of ELM

Fig.5 Control algorithm flowchart
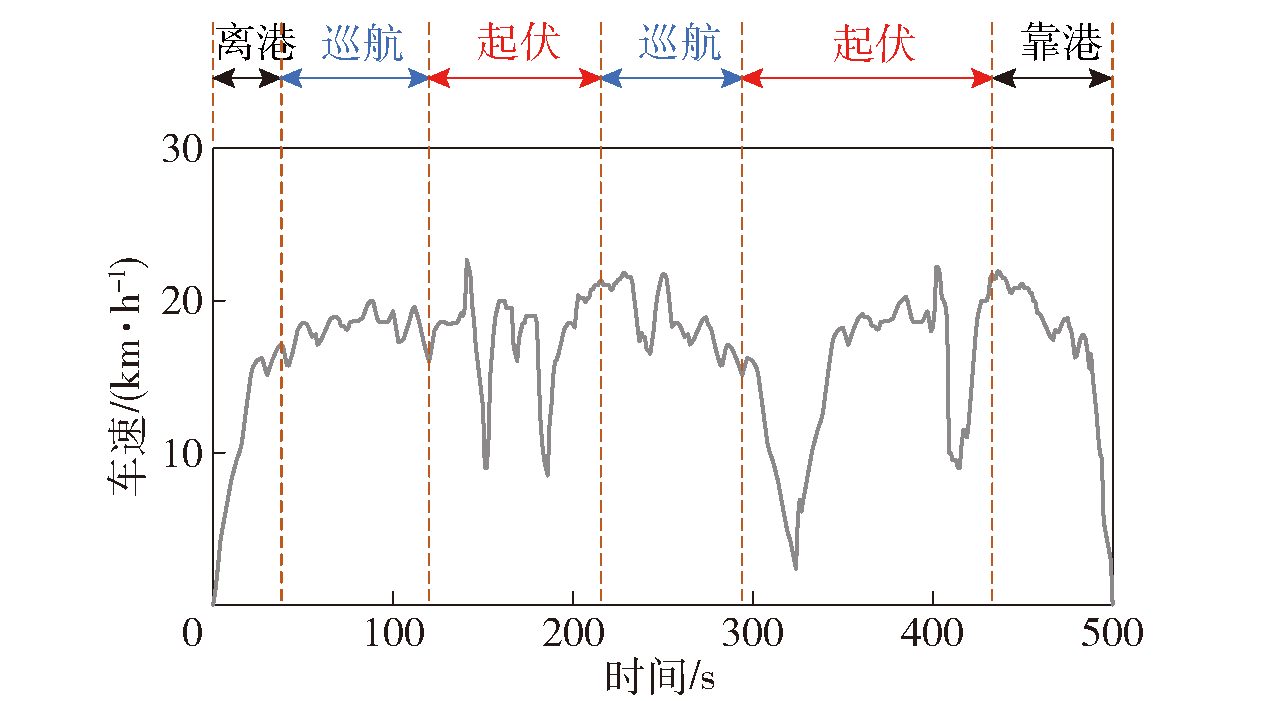
Fig.6 Driving cycle
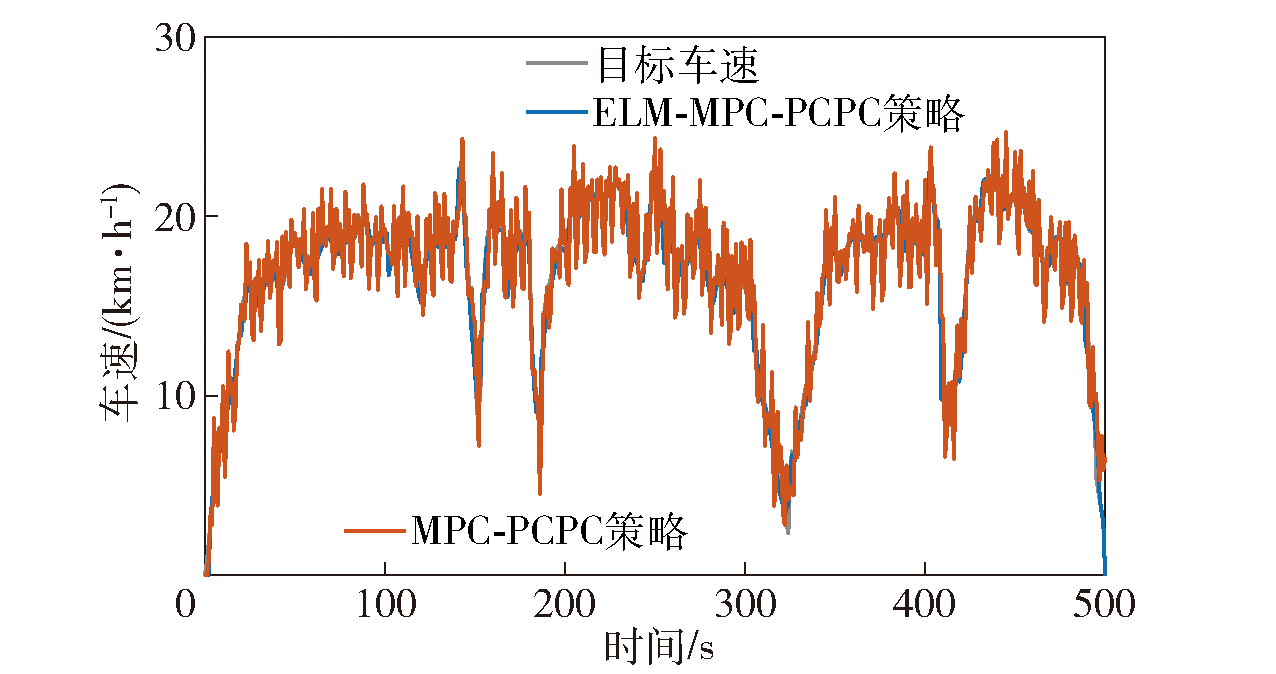
Fig.7 Vehicle speed
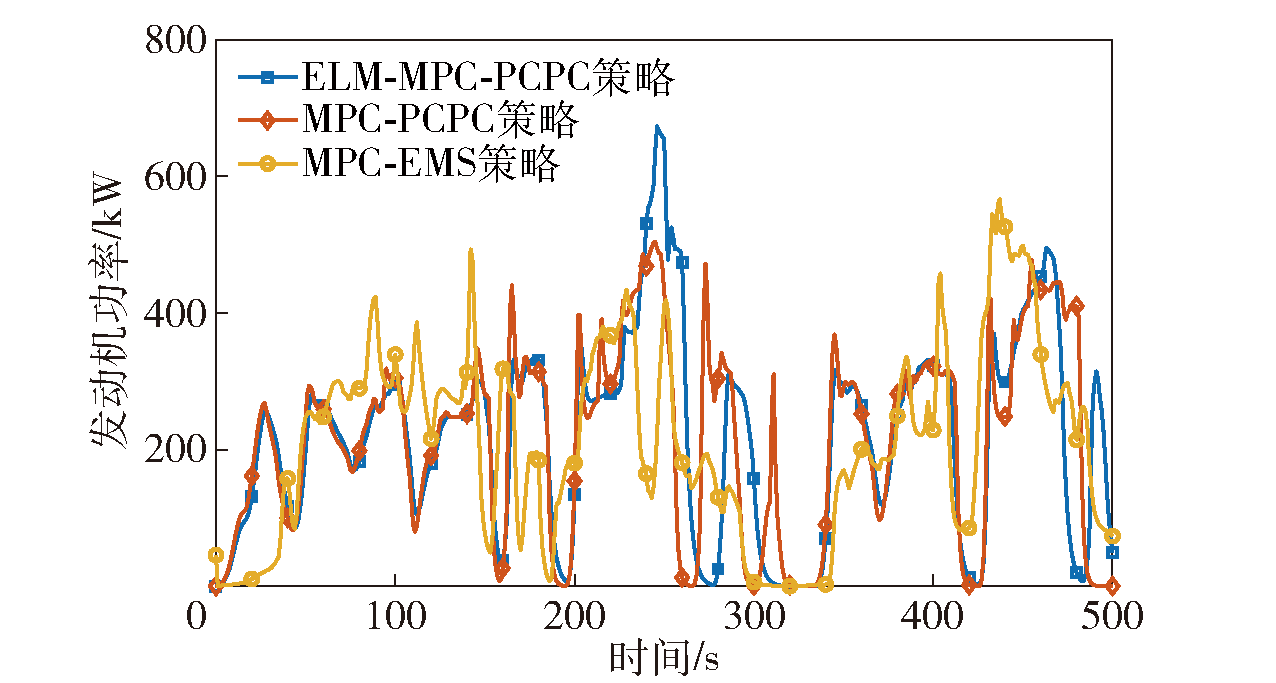
Fig.8 Engine power
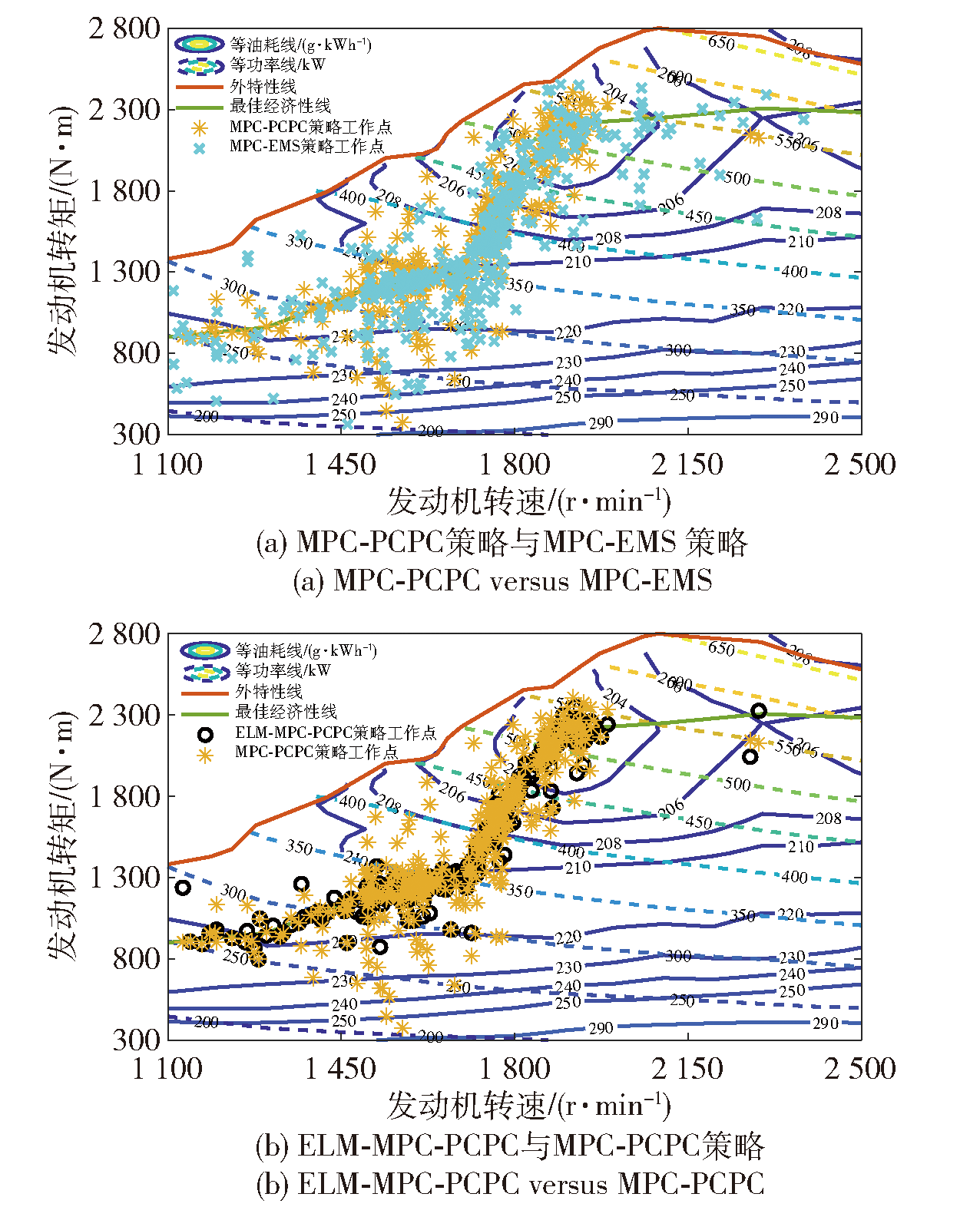
Fig.9 Engine operating points
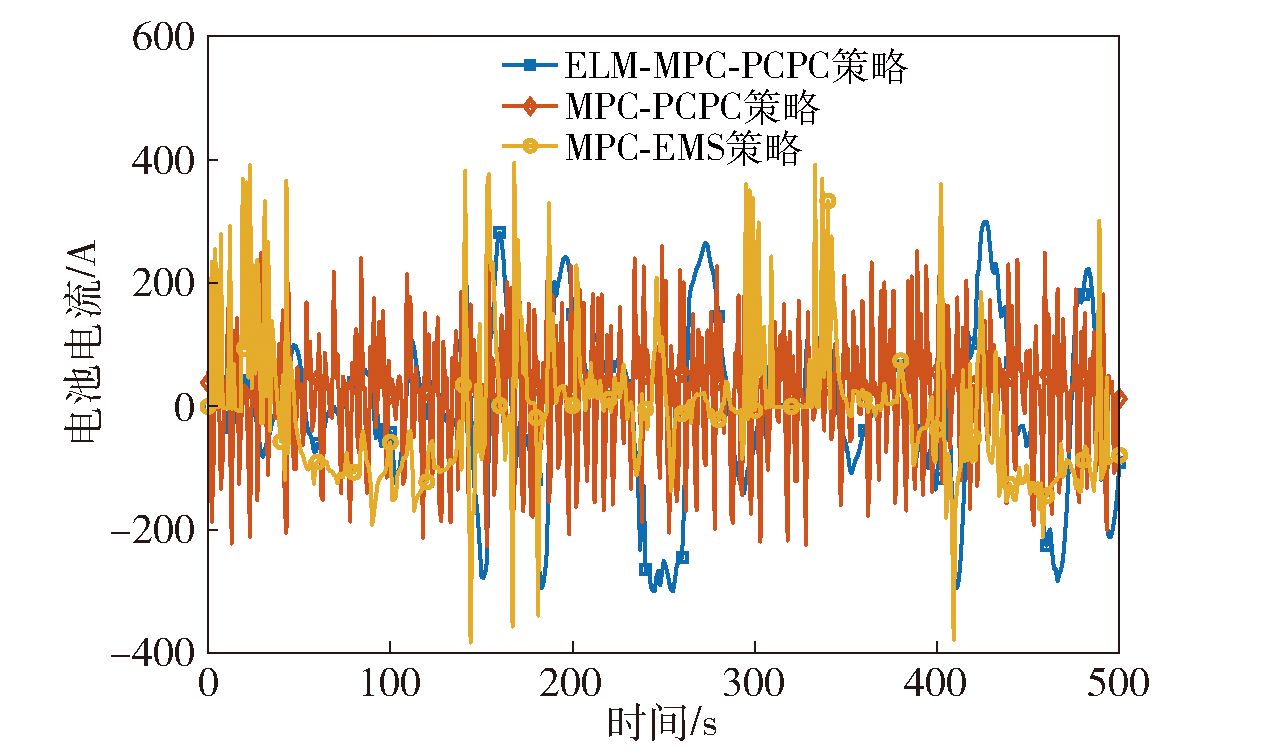
Fig.10 Battery current
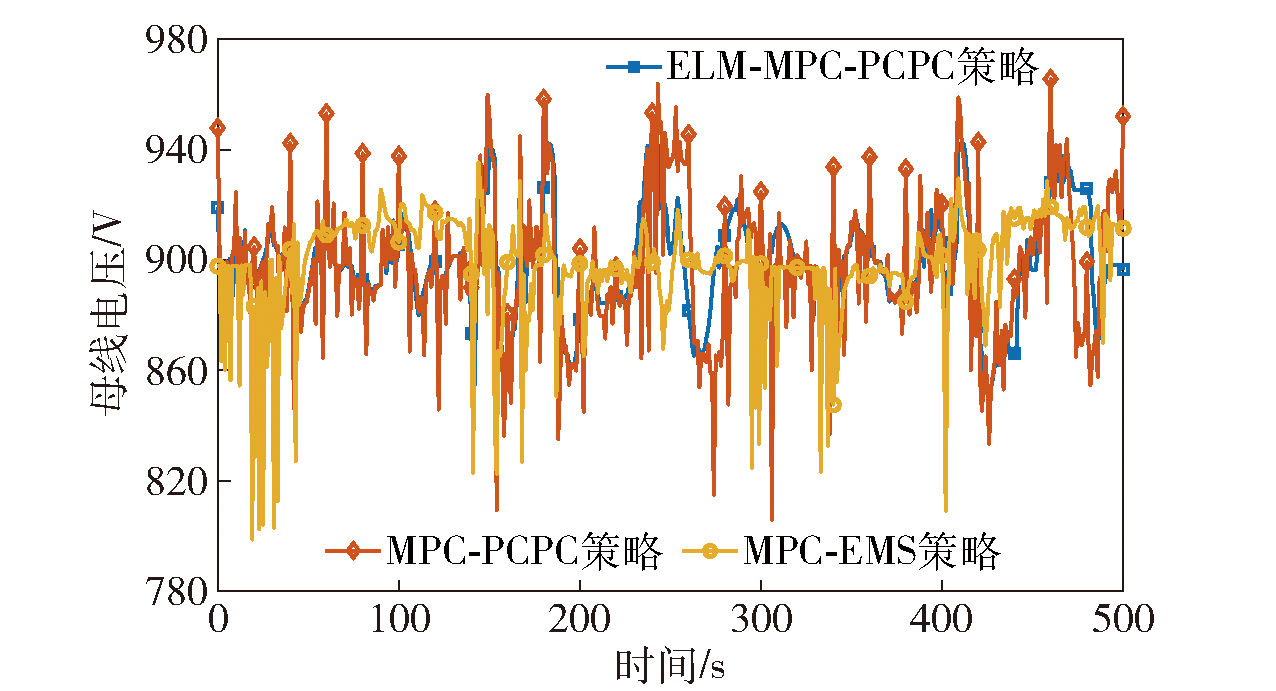
Fig.11 Bus voltage
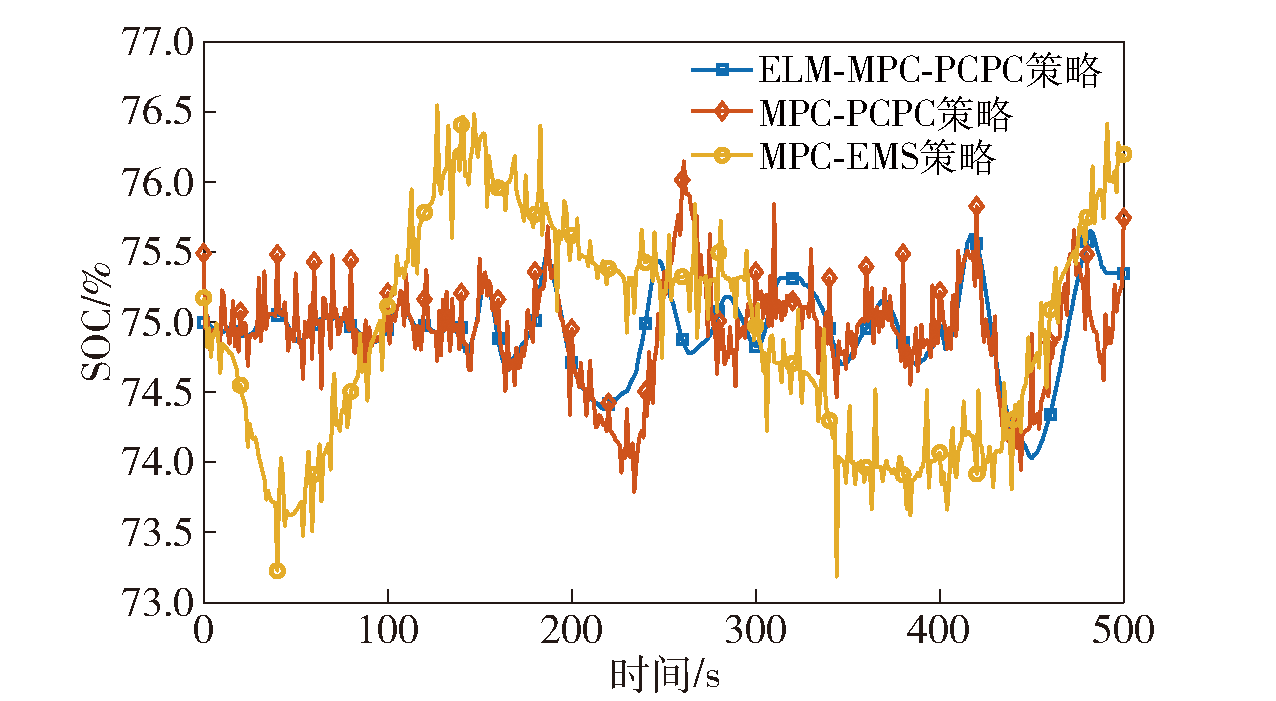
Fig.12 Change of SOC
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 10.475 | 0.306 | 18.863 | 0.041 | 35 |
| MPC-PCPC | 11.258 | 0.413 | 21.797 | 0.054 | 34 |
| MPC-EMS | 11.555 | 0.758 | 22.401 | 0.075 | 29 |
Table 2 Comparison of indexes
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 10.475 | 0.306 | 18.863 | 0.041 | 35 |
| MPC-PCPC | 11.258 | 0.413 | 21.797 | 0.054 | 34 |
| MPC-EMS | 11.555 | 0.758 | 22.401 | 0.075 | 29 |
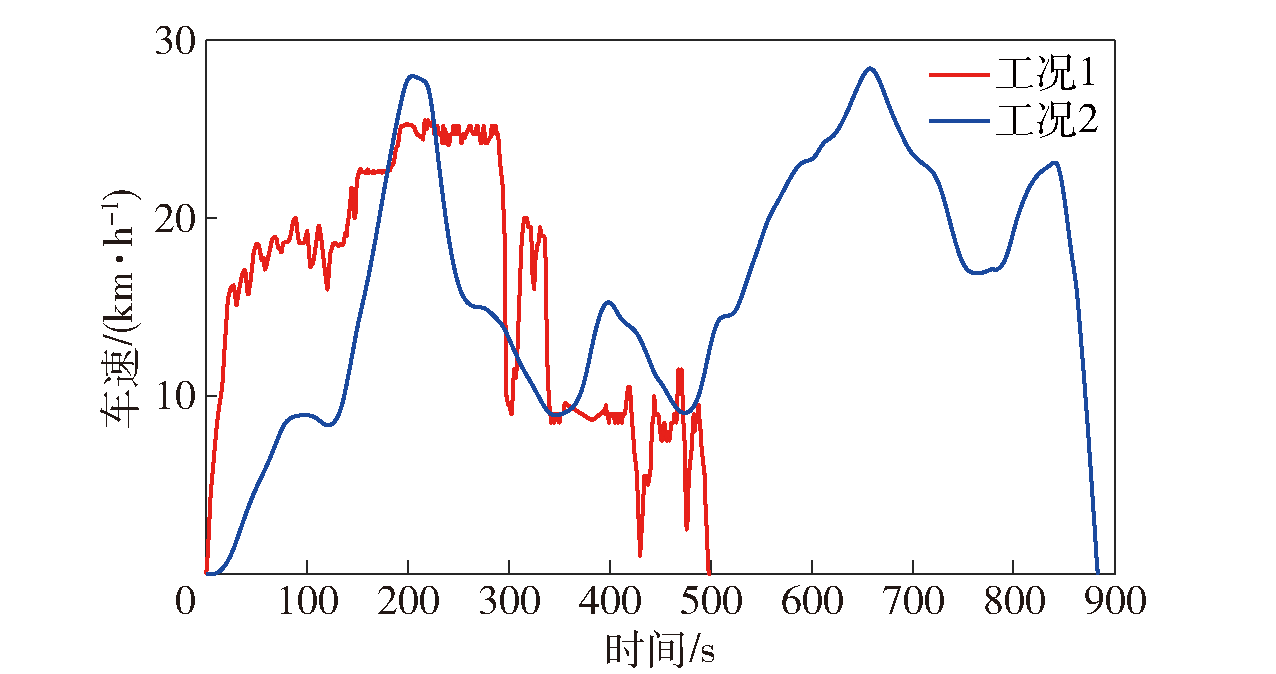
Fig.13 Test vehicle speed
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 11.250 | 0.388 | 22.383 | 0.043 | 36 |
| MPC-PCPC | 12.078 | 0.503 | 24.483 | 0.057 | 34 |
| MPC-EMS | 12.455 | 0.881 | 24.941 | 0.074 | 29 |
Table 3 Comparison of indexes under Condition 1
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 11.250 | 0.388 | 22.383 | 0.043 | 36 |
| MPC-PCPC | 12.078 | 0.503 | 24.483 | 0.057 | 34 |
| MPC-EMS | 12.455 | 0.881 | 24.941 | 0.074 | 29 |
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 19.850 | 0.379 | 20.363 | 0.077 | 63 |
| MPC-PCPC | 21.379 | 0.533 | 21.797 | 0.087 | 59 |
| MPC-EMS | 21.640 | 0.777 | 22.401 | 0.095 | 48 |
Table 4 Comparison of indexes under Condition 2
| 策略 | 等效燃油 消耗/L | SOC 标准差 | 母线电压 标准差 | ΔSOH/ % | 仿真时 长/min |
|---|---|---|---|---|---|
| ELM-MPC-PCPC | 19.850 | 0.379 | 20.363 | 0.077 | 63 |
| MPC-PCPC | 21.379 | 0.533 | 21.797 | 0.087 | 59 |
| MPC-EMS | 21.640 | 0.777 | 22.401 | 0.095 | 48 |
| [1] |
辛志坡, 王伟. 高速水陆两栖车辆技术发展[J]. 专用汽车, 2007(6):18-21.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
林强, 徐小军, 邹腾安. 一种水陆两栖车的增程式动力系统设计与仿真[J]. 机电技术, 2018(5):72-76.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
张昊, 范钦灏, 王巍, 等. 基于强化学习的多燃烧模式混合动力能量管理策略[J]. 汽车工程, 2021, 43(5):683-691.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
王绪. 串联型混合动力电传动车辆前后功率链协调控制研究[D]. 北京: 北京理工大学, 2021.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
陈路明, 廖自力, 马晓军, 等. 基于分层控制的混合动力车辆实时能量管理策略[J]. 兵工学报, 2021, 42(8): 1580-1591.
|
|
doi: 10.3969/j.issn.1000-1093.2021.08.002 |
|
| [17] |
谭颖琦, 许景懿, 熊光明, 等. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
王志鹏, 倪阳, 邱耿耀, 等. 航行姿态对两栖车阻力性能影响分析[C]// 第三十一届全国水动力学研讨会. 厦门: 中国力学学会, 2020:171-177.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
童思陈, 许光祥, 邓明文. 内河船舶航行阻力及通航水力指标计算[J]. 水利水运工程学报, 2010(2):100-106.
|
|
|
|
| [25] |
辛军锜. 模型失配条件下基于失配信息的预测控制研究[D]. 沈阳: 东北大学, 2011.
|
|
|
|
| [26] |
高锋阳, 罗引航, 李明明, 等. 失配参数在线矫正的永磁同步电机预测电流控制[J]. 控制理论与应用, 2021, 38(5):603-614.
|
|
|
|
| [27] |
肖宗鑫, 李晓杰, 肖宗烁, 等. 基于RBF神经网络优化的无人驾驶车辆增量线性模型预测轨迹跟踪控制研究[J]. 重庆理工大学学报(自然科学), 2021, 35(3) : 36-45.
|
|
|
|
| [28] |
陈铭豪. 基于高斯过程回归的非参数化辨识及模型预测控制方法研究[D]. 杭州: 浙江大学, 2022.
|
|
|
|
| [29] |
|
| [1] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [2] | ZHAO Wei, HOU Baolin, YAN Shaojun, BAO Dan, LIN Yubin. A Dynamic Model of Interval Uncertainty of Rotational Chain Shell Magazine [J]. Acta Armamentarii, 2024, 45(6): 1991-2002. |
| [3] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Wheeled L-quadruped Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 2024, 45(12): 4272-4282. |
| [4] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [5] | REN Hongbin, SUN Jiyu, Chih-Keng CHEN, ZHAO Yuzhuang, YANG Lin. LTV-MPC-based Real-time and Anti-noise Motion Control for High-speed Vehicle [J]. Acta Armamentarii, 2024, 45(12): 4311-4322. |
| [6] | WANG Tianxiang, CUI Tao, ZHANG Fujun, ZHAO Yankai. MPC-based Intake Pressure Control of Electric Compound Supercharged Diesel Engine [J]. Acta Armamentarii, 2024, 45(10): 3642-3653. |
| [7] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [8] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [9] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [10] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [11] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [12] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [13] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [14] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [15] | YAN Feng, CHEN Xiao, WANG Xin-min, PENG Cheng, HU Ya-zhou. Fault Diagnosis of Tiltrotor Aircraft via Improved Discrete Wavelet-OMELM [J]. Acta Armamentarii, 2014, 35(11): 1914-1921. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||