
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 129-139.doi: 10.12382/bgxb.2022.0886
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
TANG Zeyue, LIU Haiou*( ), XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng
), XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng
Received:2022-10-06
Online:2023-02-10
Contact:
LIU Haiou
CLC Number:
TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC[J]. Acta Armamentarii, 2023, 44(1): 129-139.
Add to citation manager EndNote|Ris|BibTeX
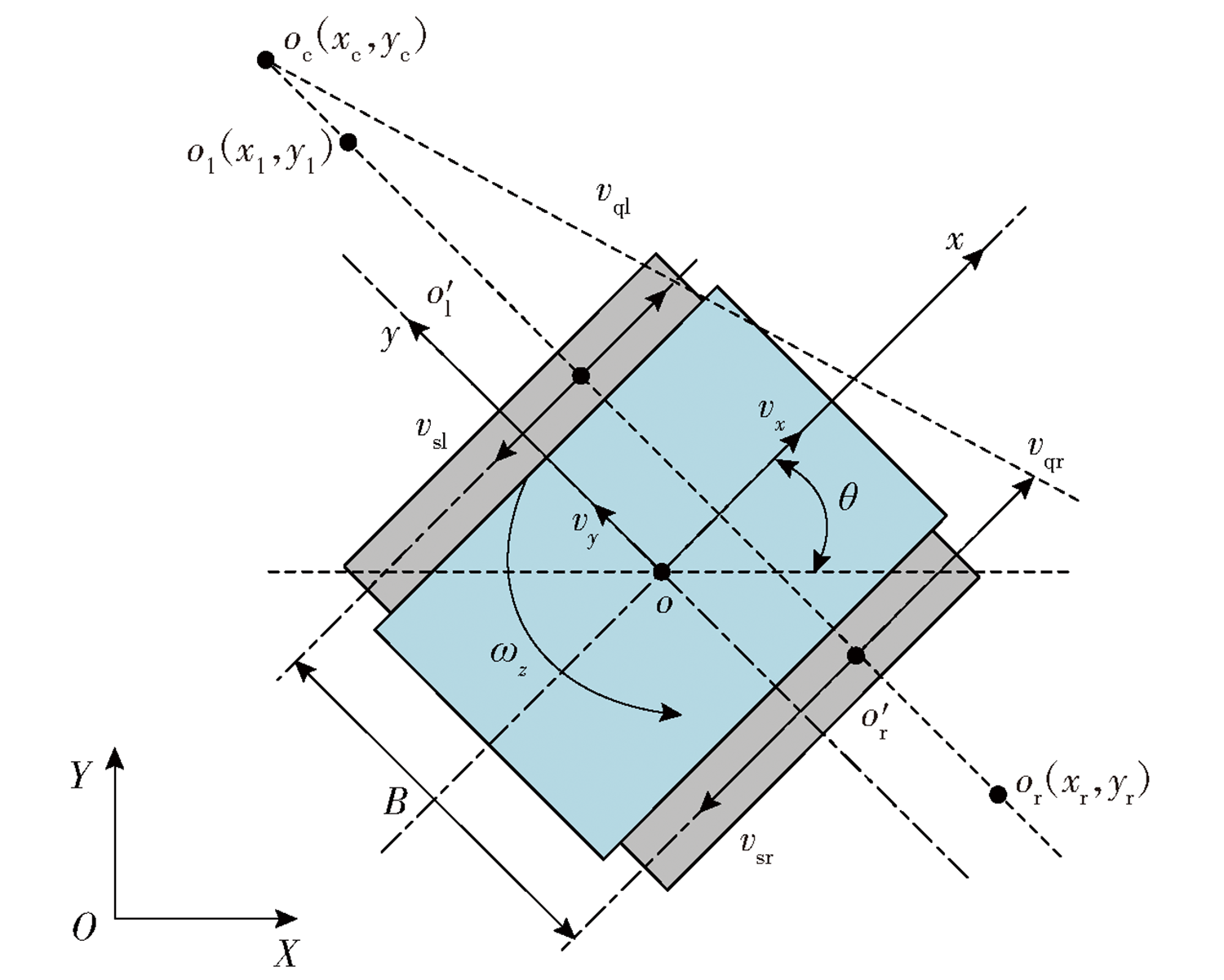
Fig.1 Kinematic model of the tracked vehicle

Fig.2 Dynamic model of the tracked vehicle
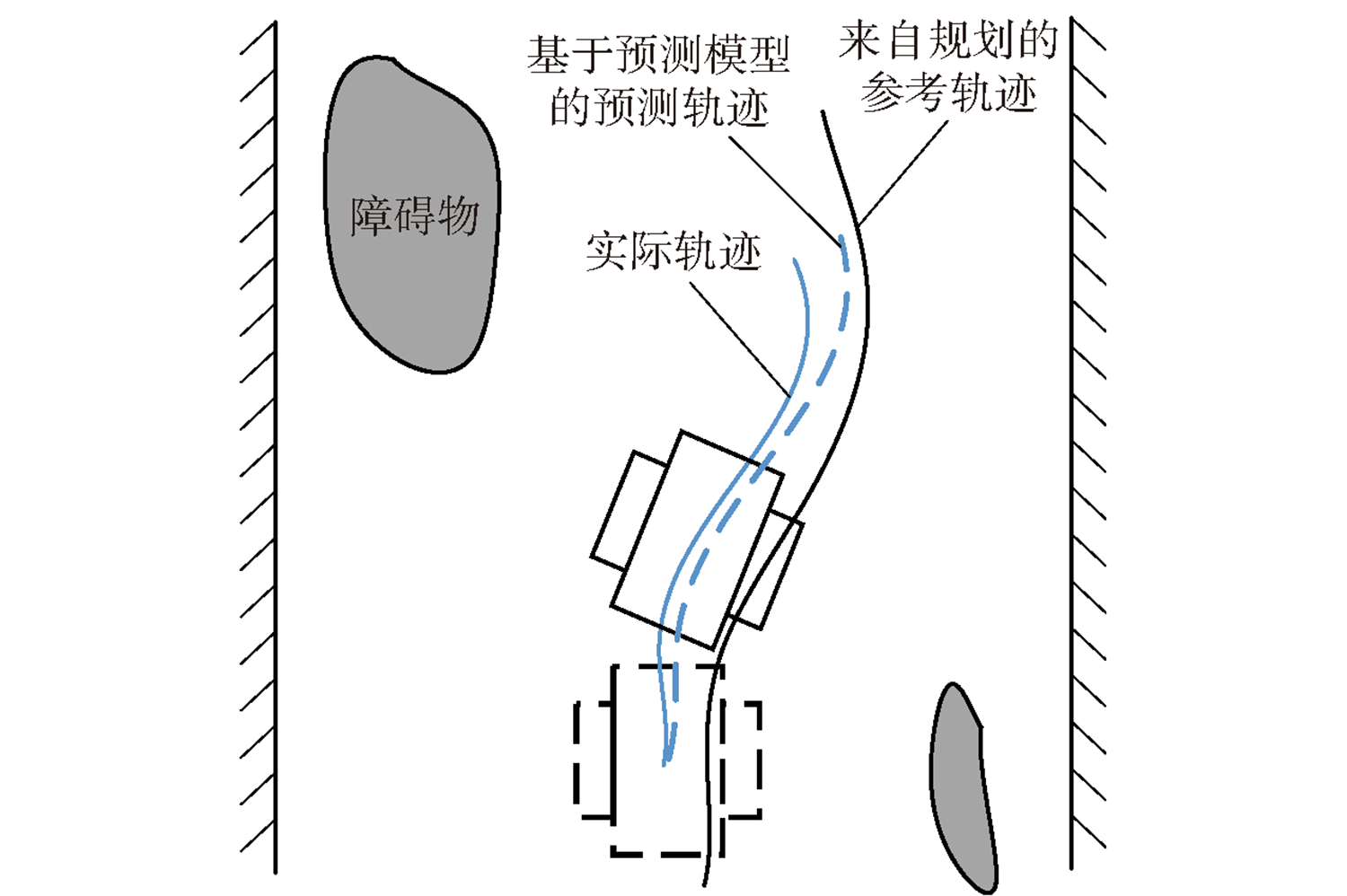
Fig.3 Schematic diagram of vehicle trajectory
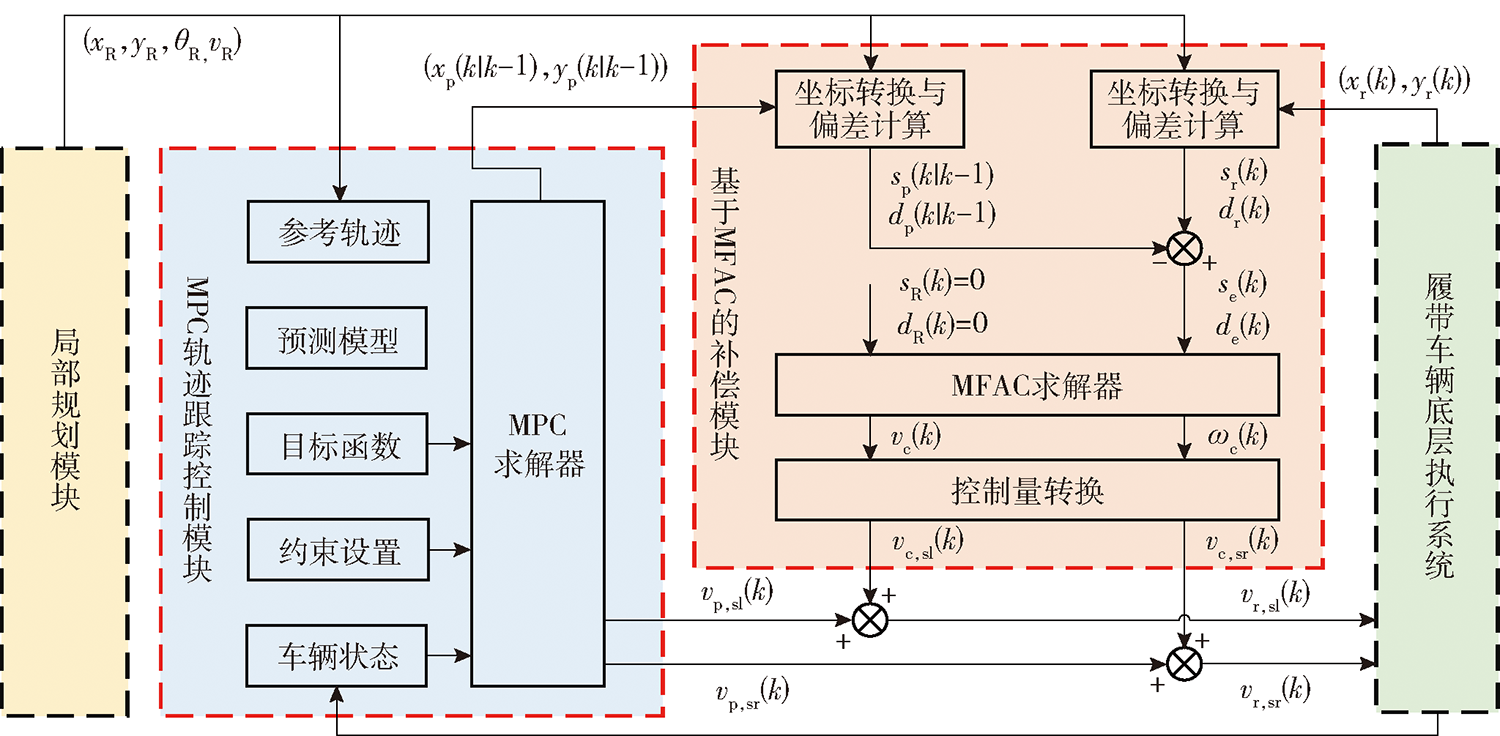
Fig.4 Overall structure diagram of trajectory tracking control algorithm for dual independent electric drive unmanned tracked vehicle based on MPC-MFAC
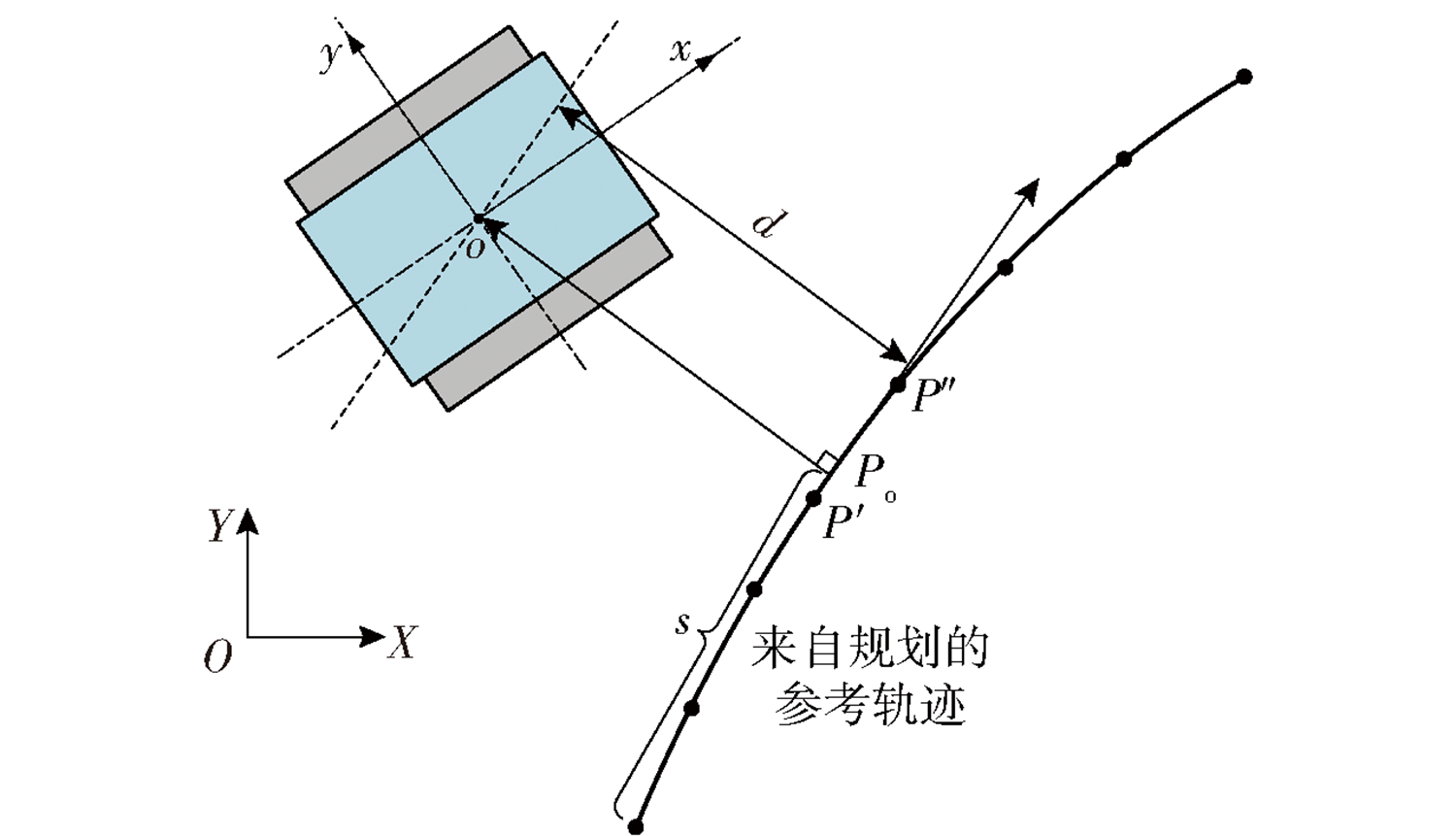
Fig.5 Schematic diagram of vehicle motion description in the Frenet coordinate system
| 车辆参数 | 数值 |
|---|---|
| 整车质量m/kg | 2960 |
| 车长L/mm | 2616 |
| 车宽W/mm | 1598 |
| 车高H/mm | 1060 |
| 履带中心距B/mm | 1232 |
| 质心离地高度Hg/mm | 200 |
Table 1 Parameters of the simulated vehicle
| 车辆参数 | 数值 |
|---|---|
| 整车质量m/kg | 2960 |
| 车长L/mm | 2616 |
| 车宽W/mm | 1598 |
| 车高H/mm | 1060 |
| 履带中心距B/mm | 1232 |
| 质心离地高度Hg/mm | 200 |
| MPC参数 | 数值 |
|---|---|
| 预测时域 | 12 |
| 控制时域 | 12 |
| 时间步长/s | 0.1 |
| 横向偏差权重 | 100 |
| 航向偏差权重 | 120 |
| 速度偏差权重 | 30 |
| 左侧控制量变化率权重 | 50 |
| 右侧控制量变化率权重 | 50 |
Table 2 MPC controller parameters
| MPC参数 | 数值 |
|---|---|
| 预测时域 | 12 |
| 控制时域 | 12 |
| 时间步长/s | 0.1 |
| 横向偏差权重 | 100 |
| 航向偏差权重 | 120 |
| 速度偏差权重 | 30 |
| 左侧控制量变化率权重 | 50 |
| 右侧控制量变化率权重 | 50 |
| MFAC参数 | 数值 |
|---|---|
| [ρ1,ρ2,ρ3,ρ4,ρ5,ρ6] | [0.1,0.5,0.9,0.5,0.8,1.0] |
| η | 1.1 |
| λ | 18.5 |
| μ | 1.2 |
| φ1(1)=φ2(1)=φ3(1) | |
| φ4(1)=φ5(1)=φ6(1) |
Table 3 MFAC controller parameters
| MFAC参数 | 数值 |
|---|---|
| [ρ1,ρ2,ρ3,ρ4,ρ5,ρ6] | [0.1,0.5,0.9,0.5,0.8,1.0] |
| η | 1.1 |
| λ | 18.5 |
| μ | 1.2 |
| φ1(1)=φ2(1)=φ3(1) | |
| φ4(1)=φ5(1)=φ6(1) |

Fig.6 Simulation model in VREP
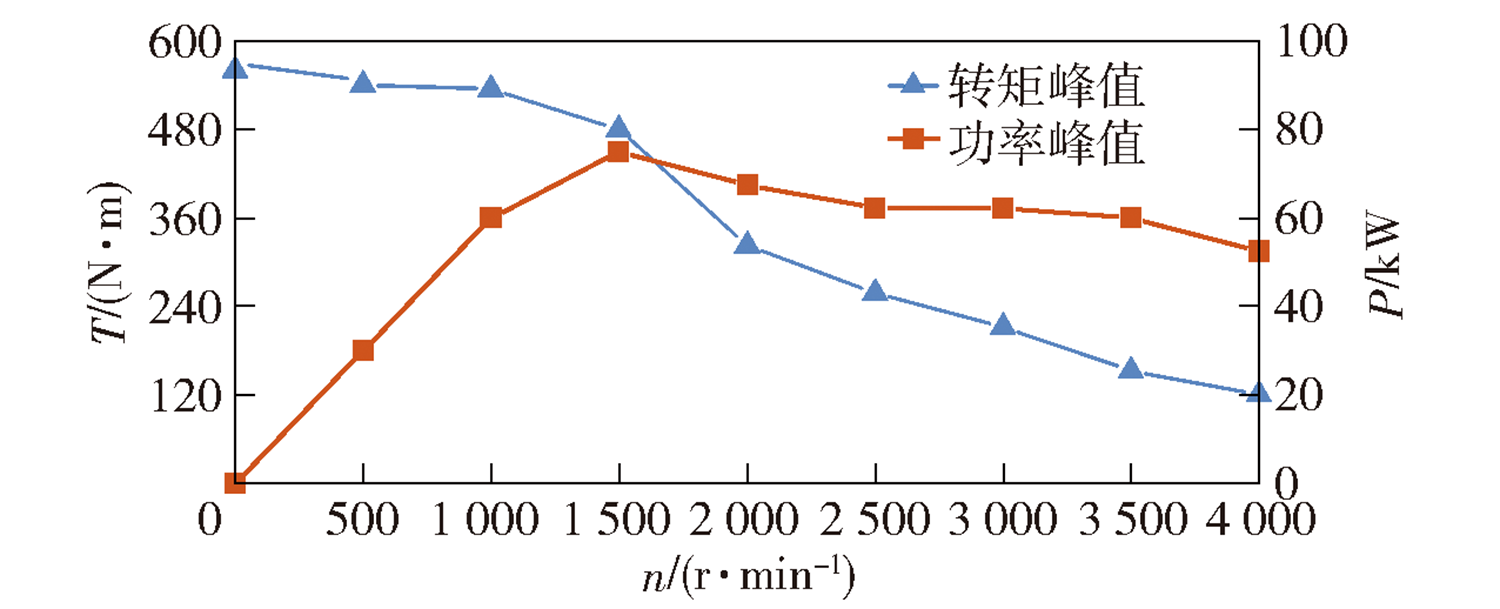
Fig.7 External characteristics of motor

Fig.8 Trajectory tracking performances of simulation
| 控制方法 | 参数 | 均值 | 标准差 | 最大值 |
|---|---|---|---|---|
| 横向绝对偏差/m | 0.2090 | 0.1636 | 1.0029 | |
| 纯MPC | 航向绝对偏差/(°) | 1.6142 | 1.3643 | 9.4634 |
| 求解用时/ms | 29.2679 | 6.7551 | 44.4548 | |
| 横向绝对偏差/m | 0.1525 | 0.1235 | 1.0029 | |
| MPC+MFAC | 航向绝对偏差/(°) | 1.2391 | 0.7161 | 5.7133 |
| MFAC求解用时/ms | 6.2606 | 2.1833 | 27.2119 | |
| 总求解用时/ms | 35.5285 | 7.2582 | 65.4892 |
Table 4 Statistical results of tracking performance of simulation
| 控制方法 | 参数 | 均值 | 标准差 | 最大值 |
|---|---|---|---|---|
| 横向绝对偏差/m | 0.2090 | 0.1636 | 1.0029 | |
| 纯MPC | 航向绝对偏差/(°) | 1.6142 | 1.3643 | 9.4634 |
| 求解用时/ms | 29.2679 | 6.7551 | 44.4548 | |
| 横向绝对偏差/m | 0.1525 | 0.1235 | 1.0029 | |
| MPC+MFAC | 航向绝对偏差/(°) | 1.2391 | 0.7161 | 5.7133 |
| MFAC求解用时/ms | 6.2606 | 2.1833 | 27.2119 | |
| 总求解用时/ms | 35.5285 | 7.2582 | 65.4892 |
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10): 1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
|
|
| [3] |
|
| [4] |
doi: 10.1109/ACCESS.2019.2944894 |
| [5] |
杨福威, 孟红, 朱强. 基于模型预测控制的履带式无人平台轨迹跟踪控制算法研究[J]. 舰船电子工程, 2018, 38(3):44-50.
|
|
|
|
| [6] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3): 456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
|
|
| [7] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3): 600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [8] |
doi: 10.1146/annurev-control-042920-020211 URL |
| [9] |
doi: 10.1002/rob.21587 URL |
| [10] |
侯忠生. 无模型自适应控制[M]. 北京: 北京交通大学, 2013.
|
|
|
|
| [11] |
doi: 10.1016/j.ins.2015.08.025 URL |
| [12] |
张之得, 王正杰, 郝智渊. 基于数据驱动的小型柔性翼飞行器控制研究[J]. 北京理工大学学报, 2021, 42(2):177-185.
|
|
|
|
| [13] |
|
| [14] |
侯忠生. 非参数模型及其自适应控制理论[M]. 北京: 科学出版社, 1999.
|
|
|
|
| [15] |
田涛涛, 侯忠生, 刘世达, 等. 基于无模型自适应控制的无人驾驶汽车横向控制方法[J]. 自动化学报, 2017, 43(11):1932-1940.
|
|
|
|
| [16] |
叶心, 马凯, 陈静, 等. 非结构化道路的无人车MFAC大曲率横向控制方法研究[J]. 重庆理工大学学报:自然科学, 2022, 36(2):11-19.
|
|
|
|
| [17] |
赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4): 680-688.
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
| [18] |
|
| [19] |
芮强, 王红岩, 王钦龙, 等. 基于剪应力模型的履带车辆转向力矩分析与试验[J]. 兵工学报, 2015, 36(6): 968-977.
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
|
|
| [20] |
安杰, 周志立, 曹付义. 履带滑移和转向中心线偏移对车辆稳态转向特性的影响[J]. 河南科技大学学报:自然科学版, 2006, 27(5):18-24.
|
|
|
| [1] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [2] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [3] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [4] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [5] | CHEN Meishan, LIU Ying, ZENG Weigui, QIAN Kun. Dynamic Jamming Resource Allocation Strategy of MALD [J]. Acta Armamentarii, 2023, 44(5): 1443-1455. |
| [6] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [7] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [8] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [9] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [10] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [11] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [12] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||