
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 247-259.doi: 10.12382/bgxb.2022.0823
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
JIANG Yi1,2,3, WANG Ting1,2,*( ), SHAO Peiyao4, XU Yao5, SHAO Shiliang1,2
), SHAO Peiyao4, XU Yao5, SHAO Shiliang1,2
Received:2022-09-14
Online:2023-02-10
Contact:
WANG Ting
CLC Number:
JIANG Yi, WANG Ting, SHAO Peiyao, XU Yao, SHAO Shiliang. Gait Study and Obstacle-Surmounting Performance Analysis of a Wheel-Leg Hybrid Robot[J]. Acta Armamentarii, 2023, 44(1): 247-259.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Four kinds wheel-leg hybrid robots
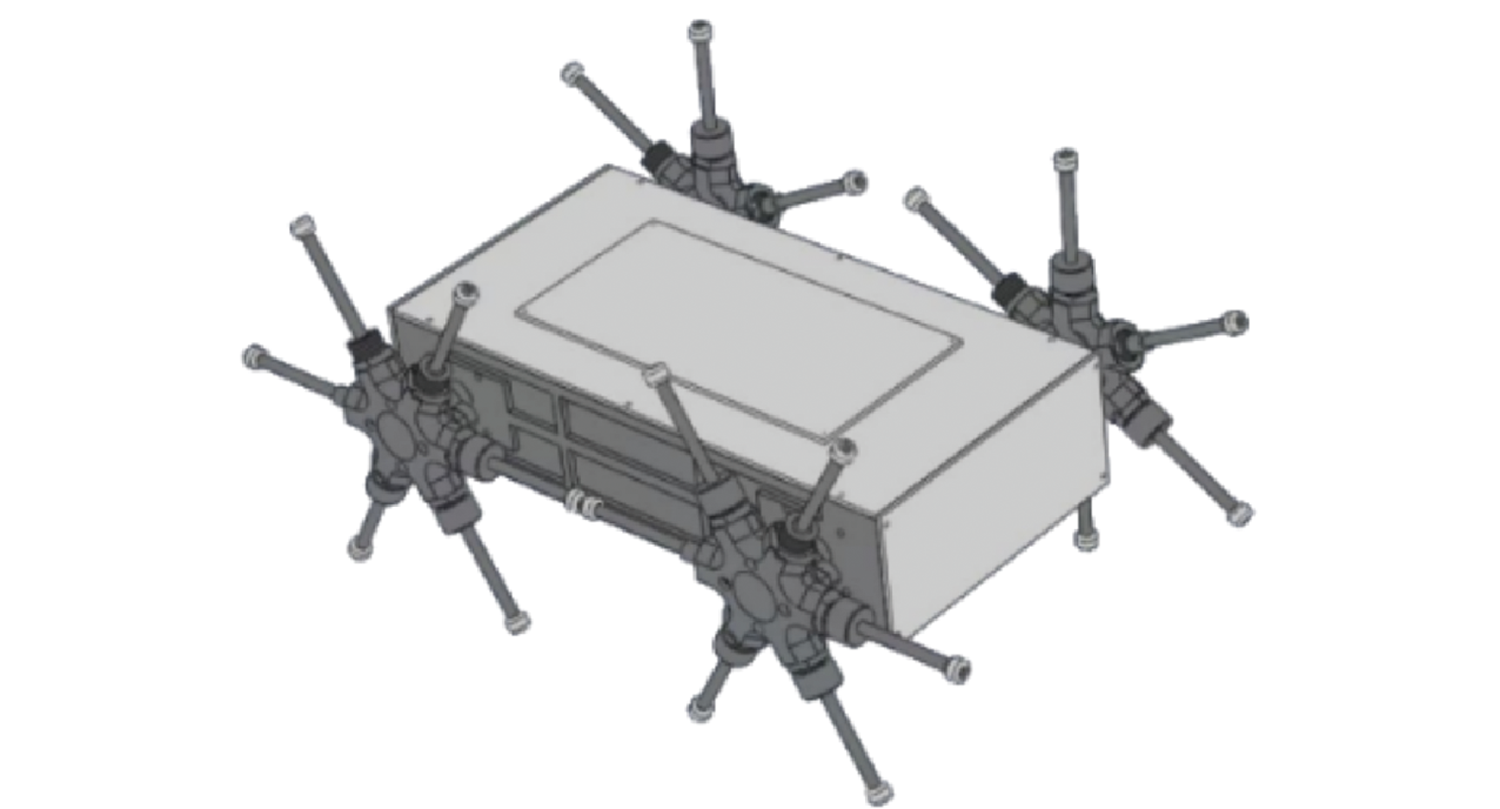
Fig.2 Overall structure diagram of a six-spoke wheel-leg robot
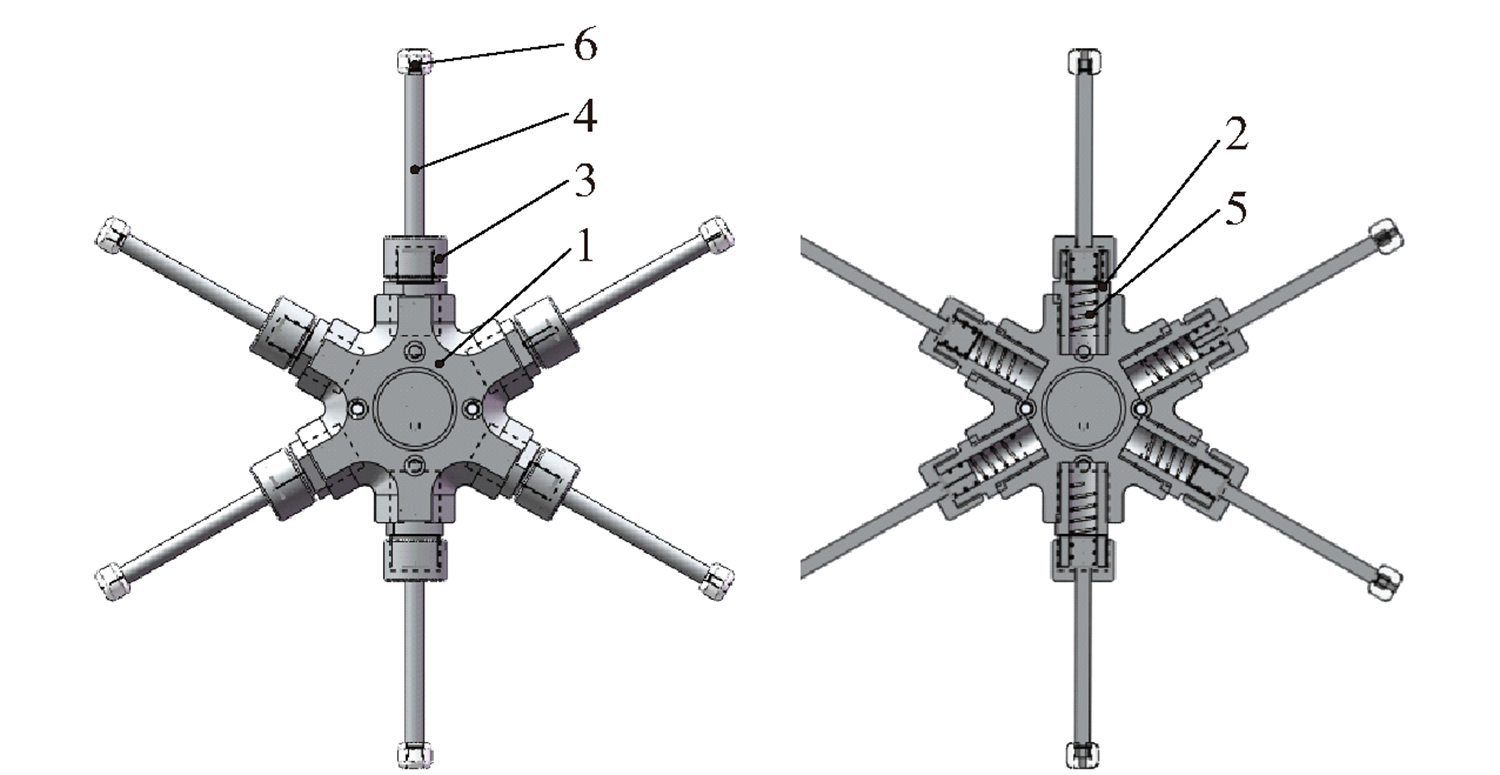
Fig.3 Structure diagram of the six-spoke wheel-leg
| 参数 | 数值 |
|---|---|
| 长度/mm | 696 |
| 宽度/mm | 370 |
| 轴距/mm | 350 |
| 轮距/mm | 340 |
| 轮腿长度/mm | 173 |
| 弹簧刚度系数/(N·m-1) | 2500 |
| 弹簧阻尼系数(N·s·m-1) | 800 |
Table 1 Parameters of the six-spoke wheel-leg robot
| 参数 | 数值 |
|---|---|
| 长度/mm | 696 |
| 宽度/mm | 370 |
| 轴距/mm | 350 |
| 轮距/mm | 340 |
| 轮腿长度/mm | 173 |
| 弹簧刚度系数/(N·m-1) | 2500 |
| 弹簧阻尼系数(N·s·m-1) | 800 |
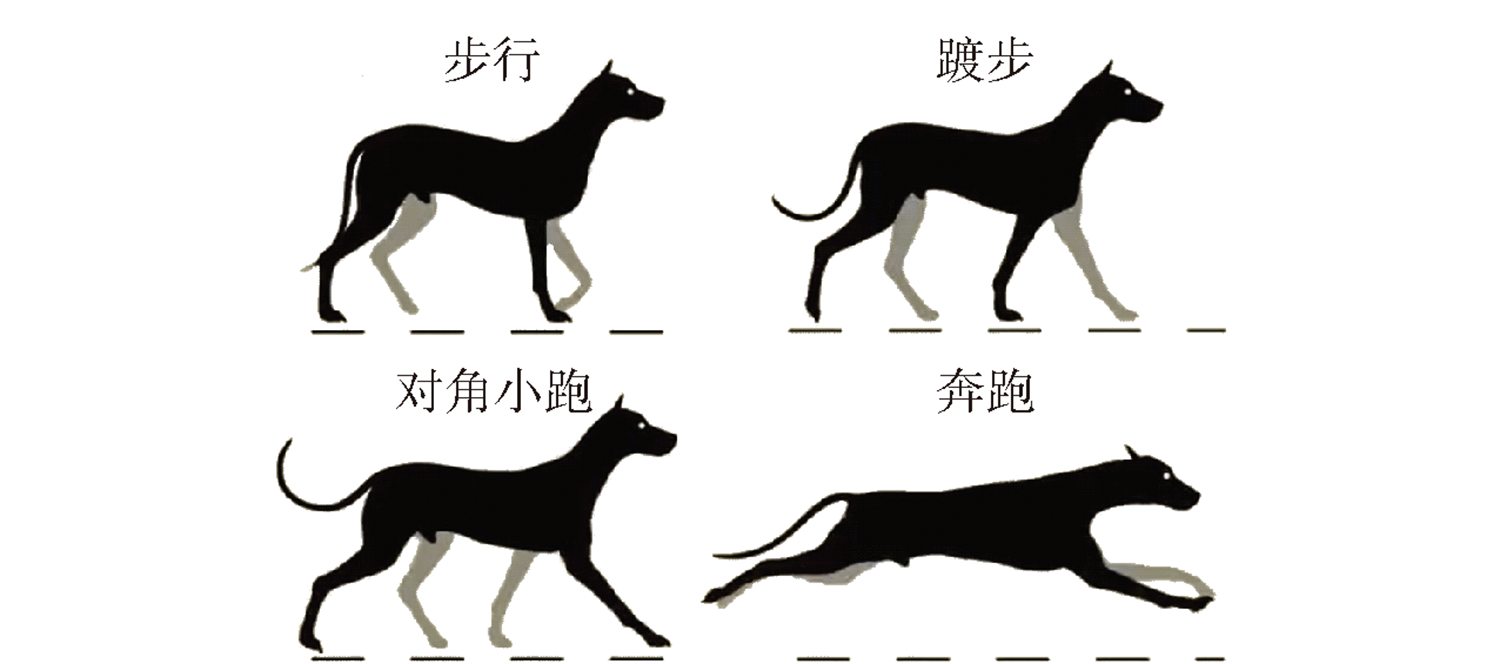
Fig.4 Quadruped gait
| 步态 | 轮腿关系 |
|---|---|
| 对角 | 对角线上轮腿相位一致,同轴轮腿有相位差 |
| 同侧 | 同侧轮腿相位一致,同轴轮腿有相位差 |
| 前后 | 同轴轮腿相位一致,同侧轮腿有相位差 |
| 滚动 | 四轮腿相位一致 |
Table 2 Gait characteristics of the robot
| 步态 | 轮腿关系 |
|---|---|
| 对角 | 对角线上轮腿相位一致,同轴轮腿有相位差 |
| 同侧 | 同侧轮腿相位一致,同轴轮腿有相位差 |
| 前后 | 同轴轮腿相位一致,同侧轮腿有相位差 |
| 滚动 | 四轮腿相位一致 |
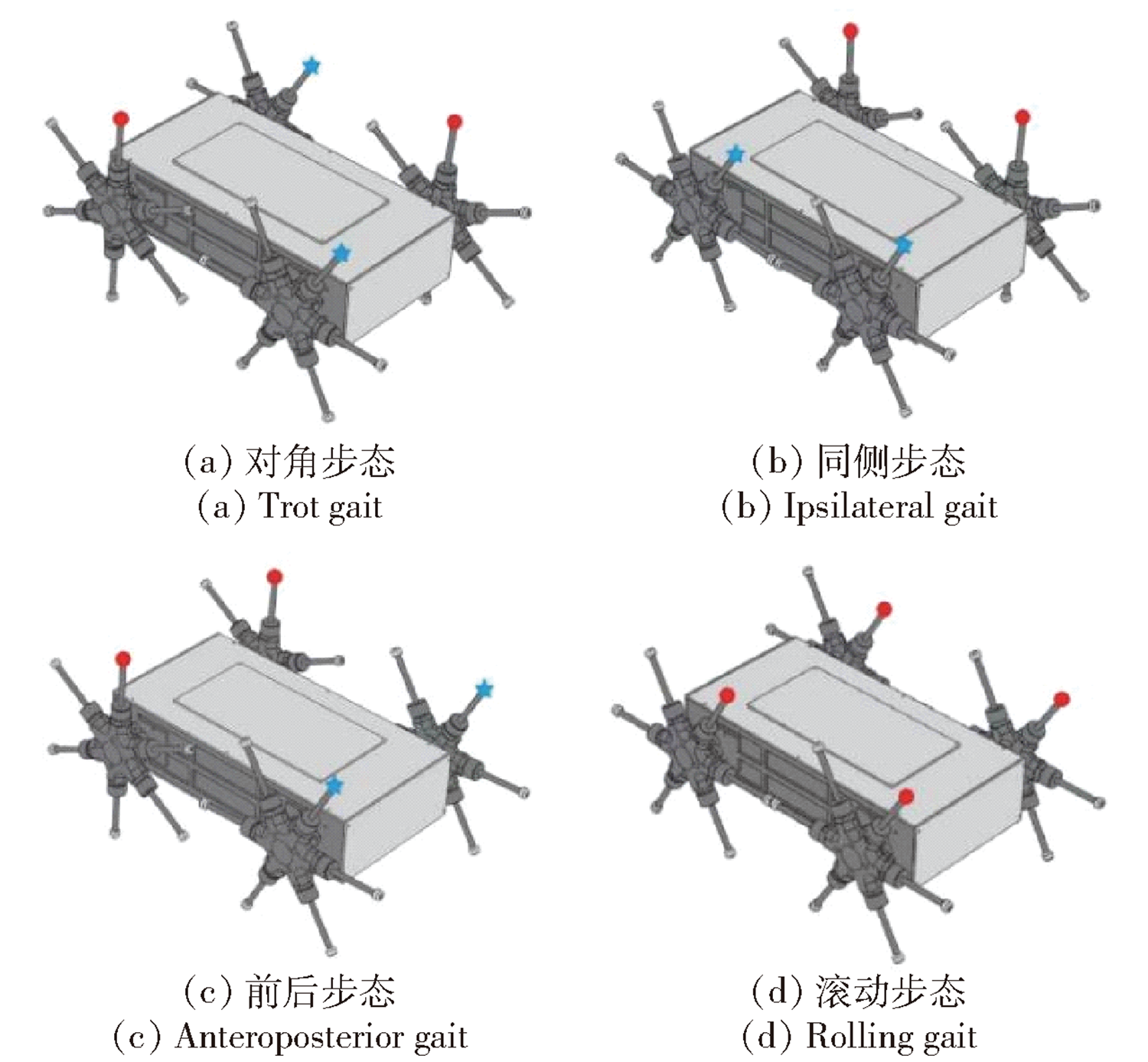
Fig.5 Robot gaits

Fig.6 Force analysis of a single wheel-leg (lift: the model diagram of wheel-leg force, right: the balance diagram of wheel-leg force and moment)
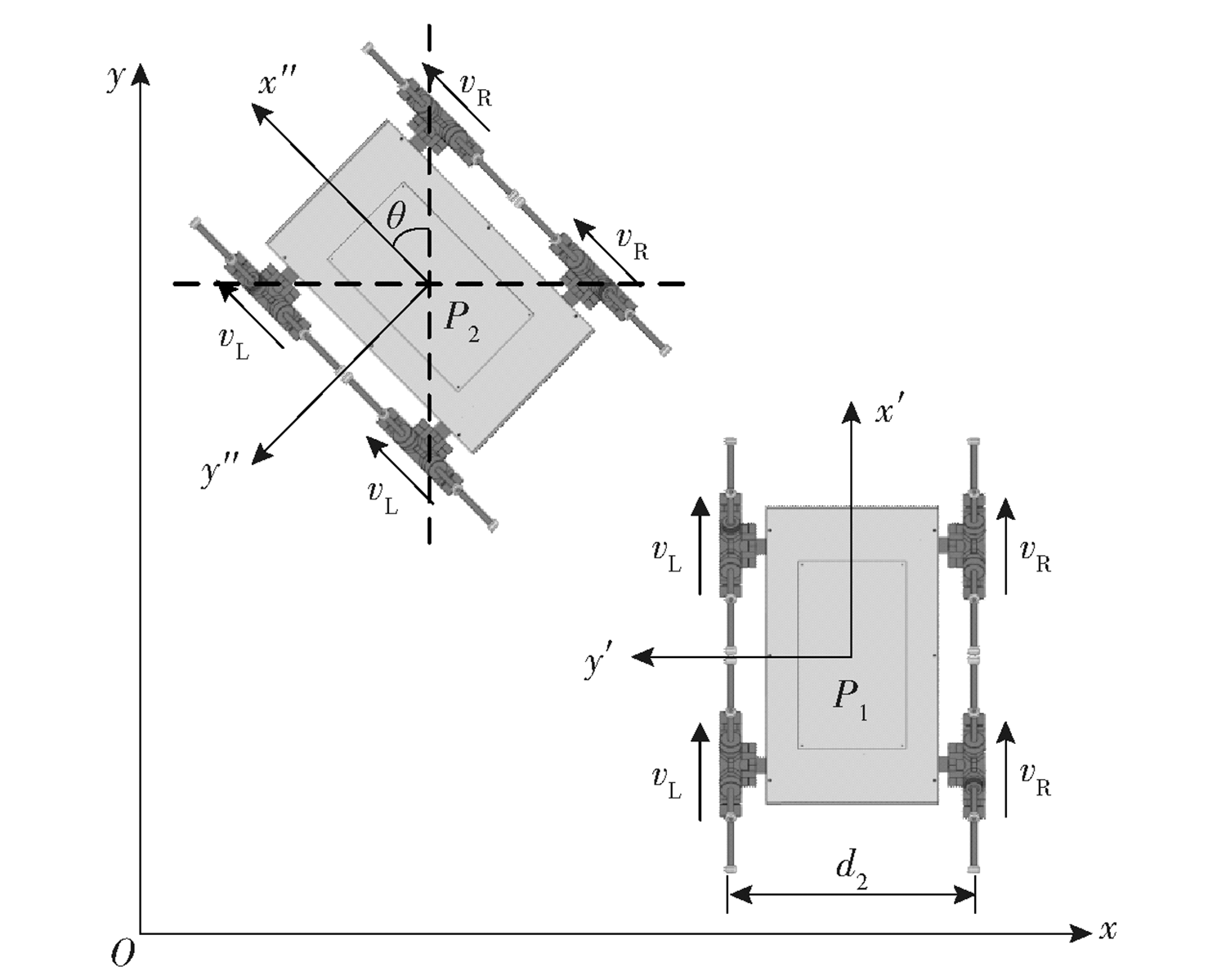
Fig.7 Schematic diagram of the differential steering model of the robot
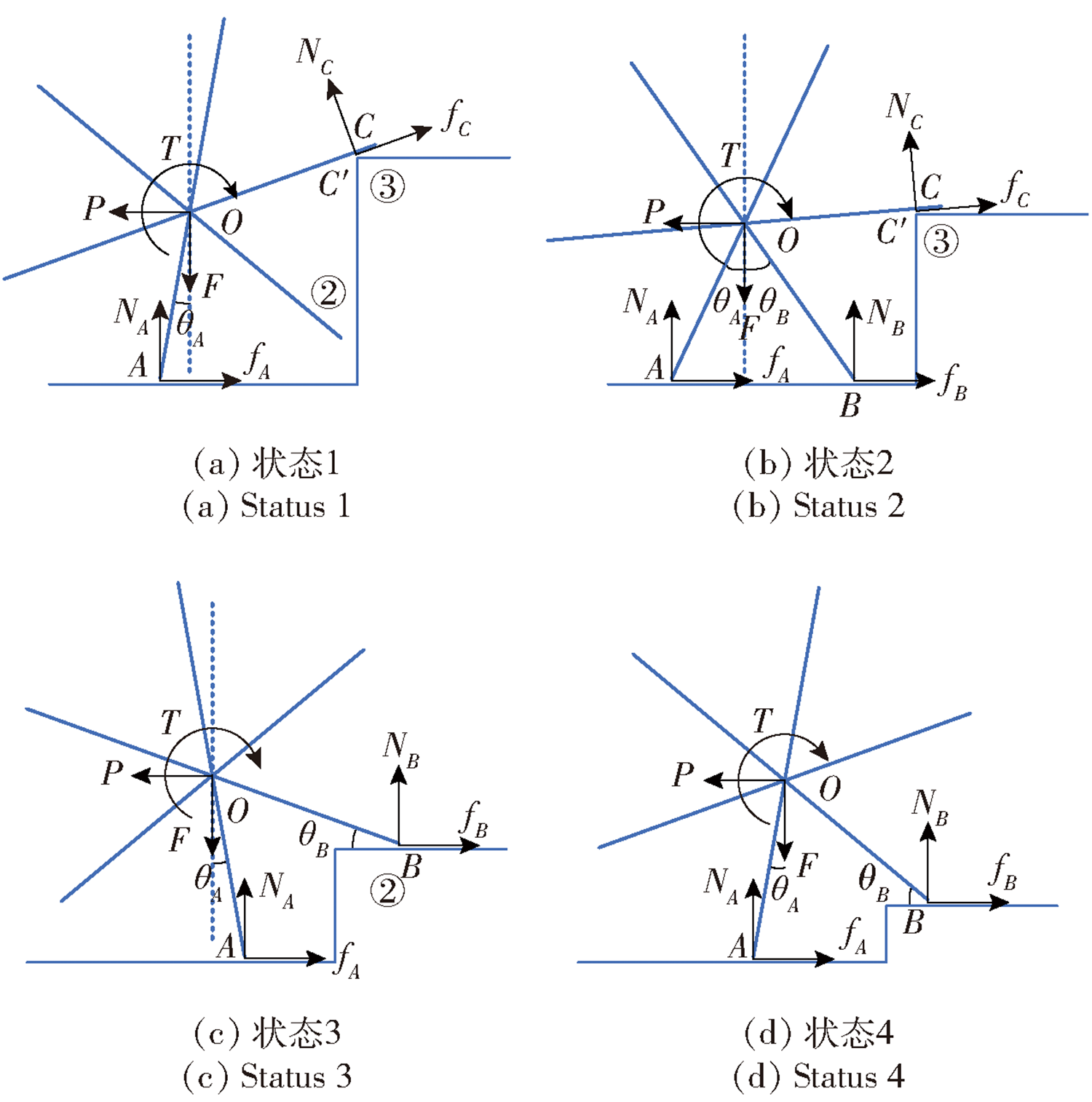
Fig.8 Force analysis of a single wheel-leg climbing steps
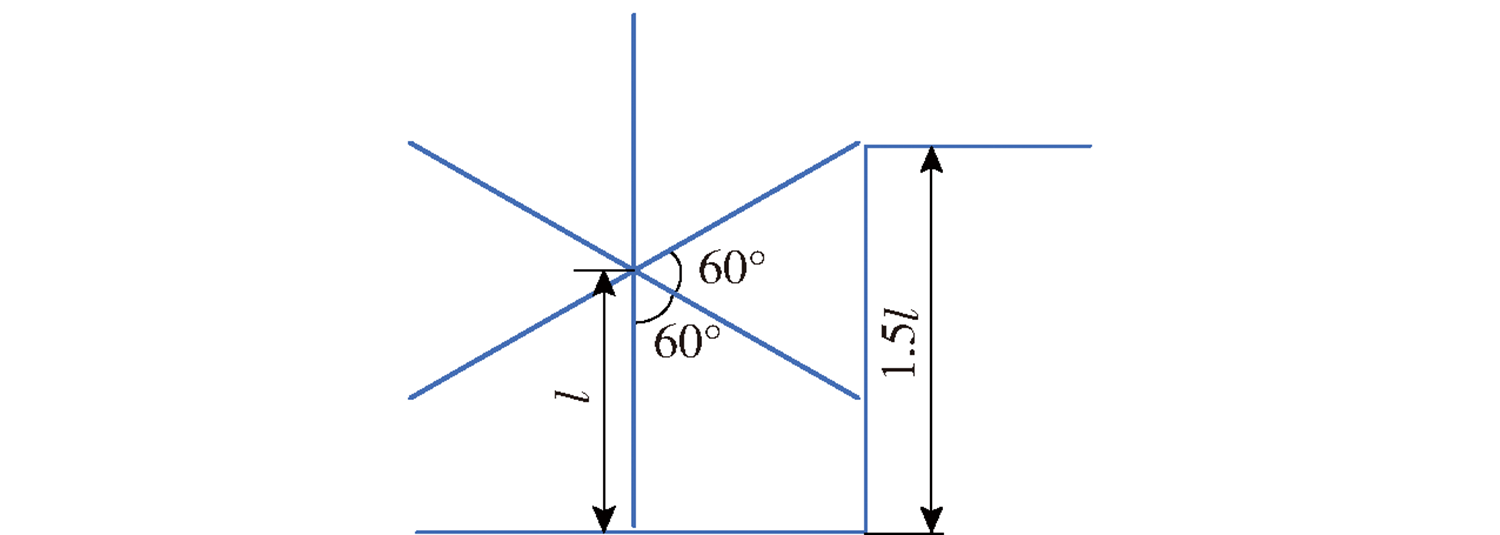
Fig.9 Analysis of obstacle-surmounting height of the wheel-leg
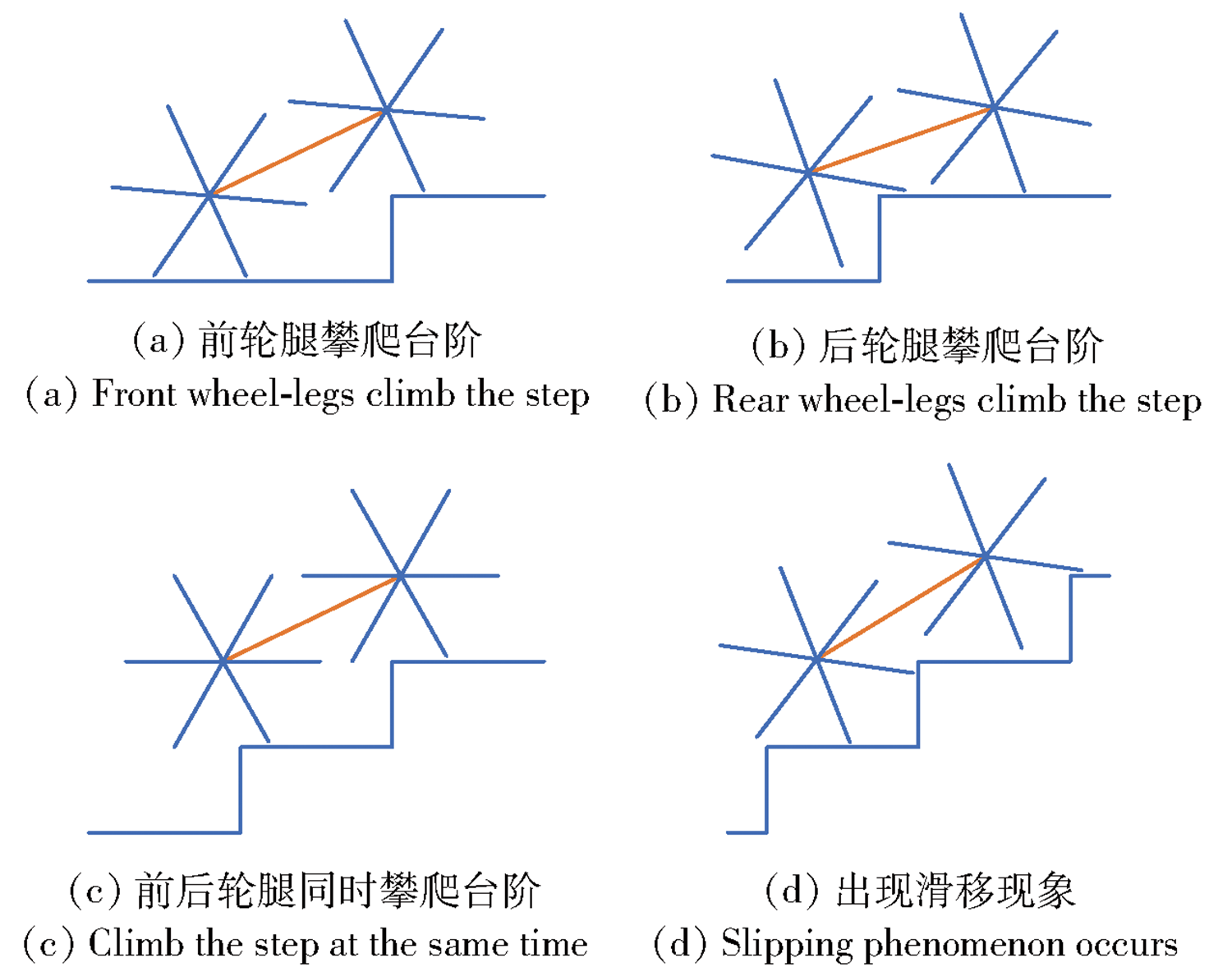
Fig.10 Robot stair climbing process under rolling gait
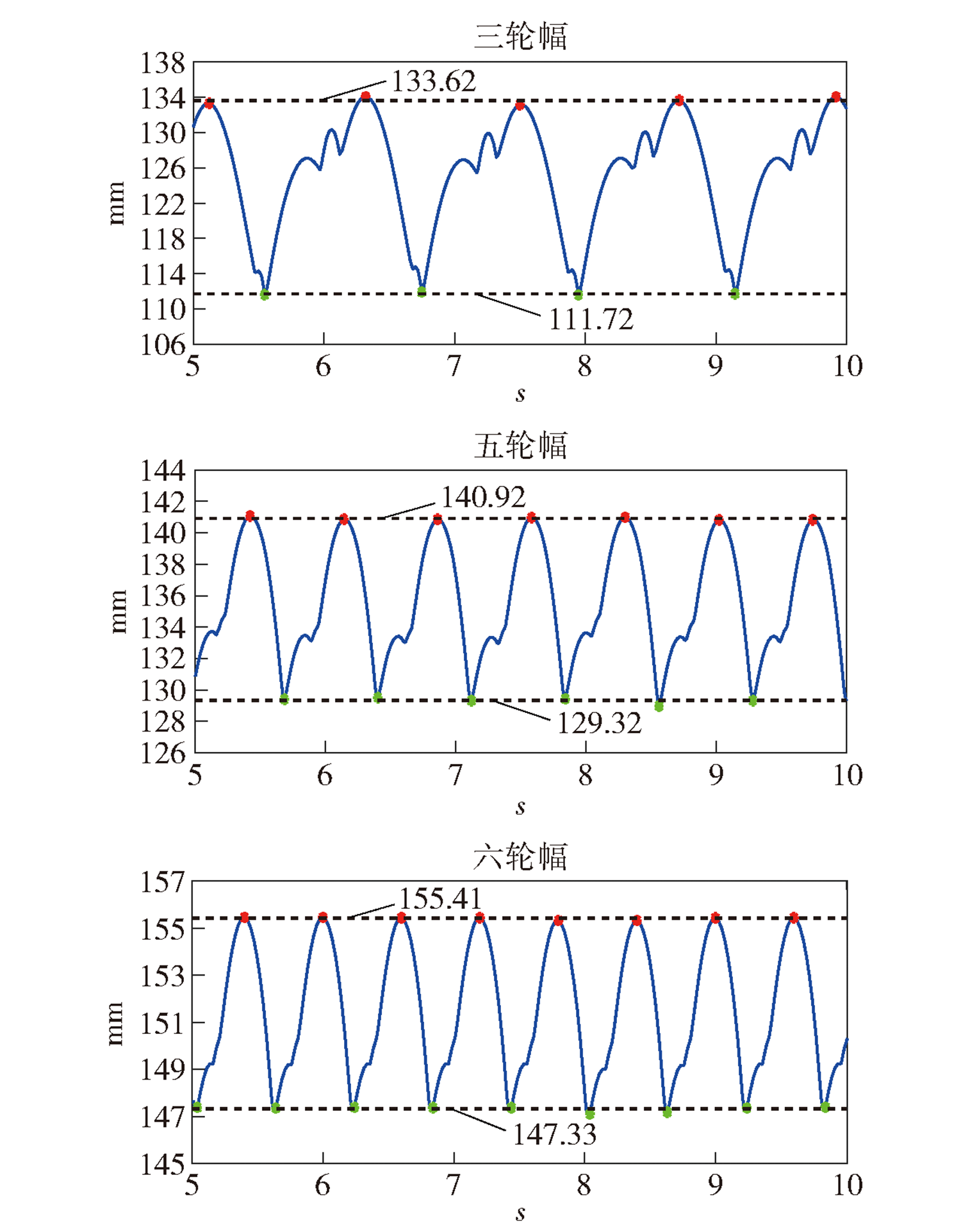
Fig.11 Robot centroid change curve of straight ahead under diagonal gait
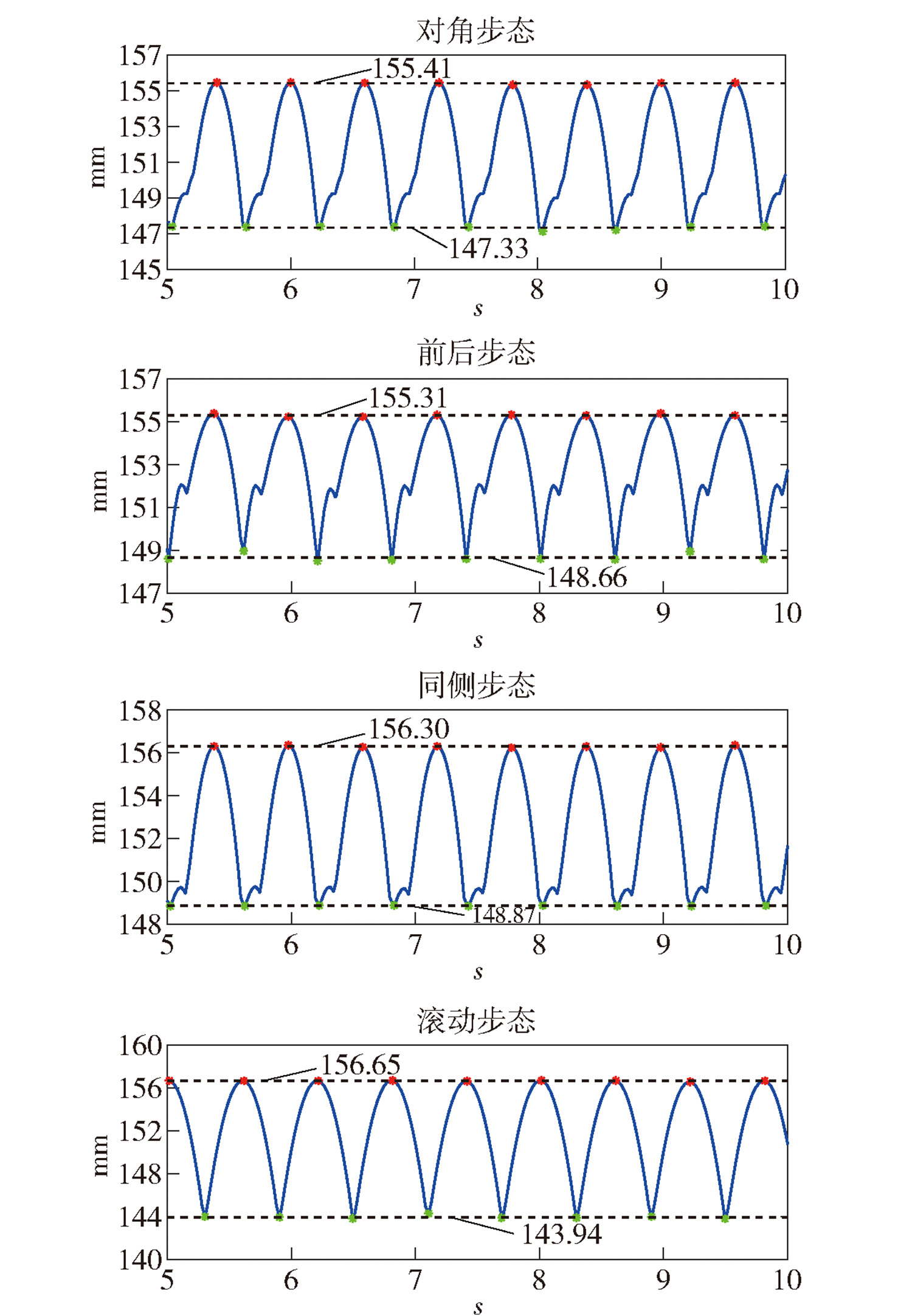
Fig.12 Cuve of the robot’s centroid change under straight walking condition
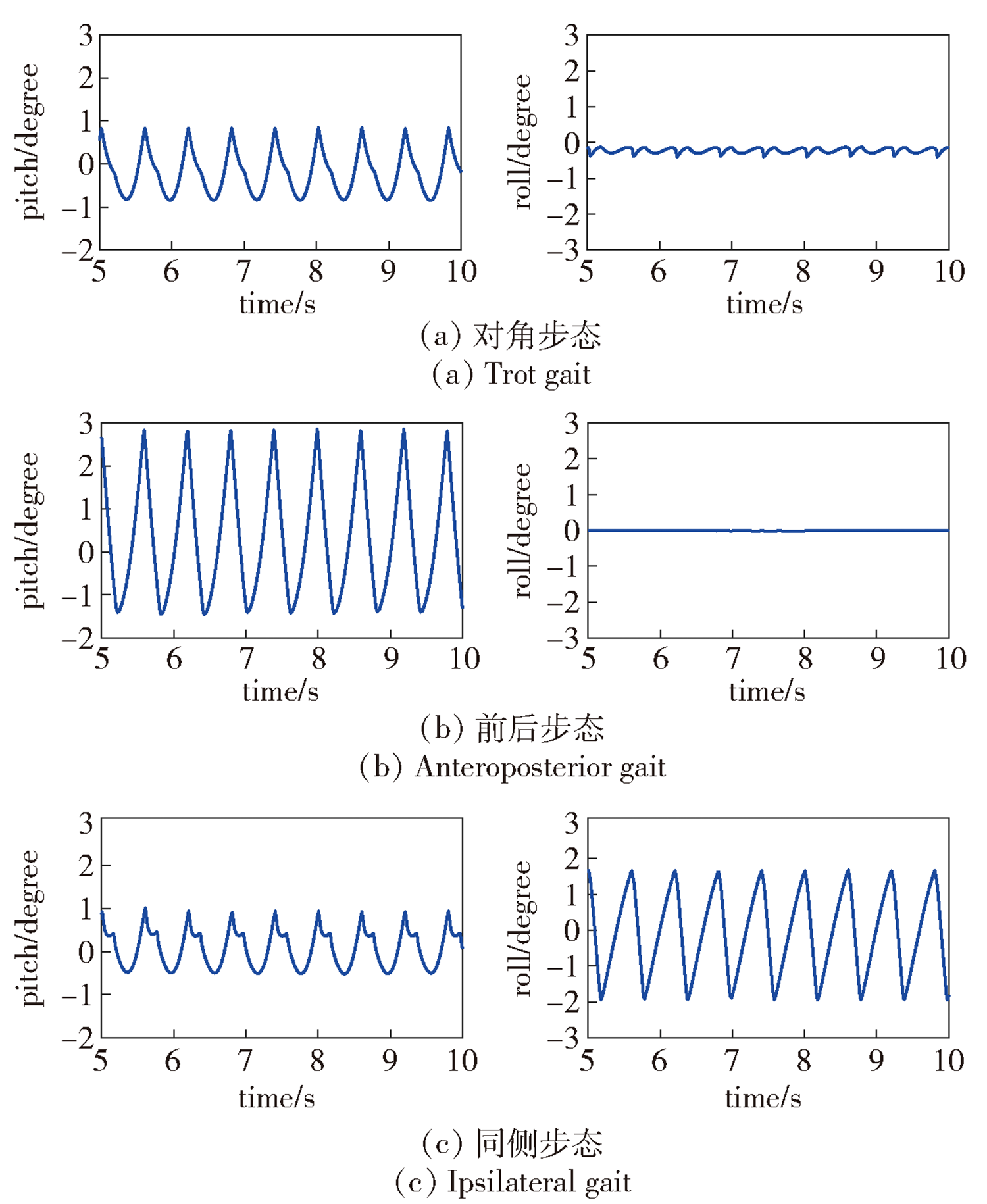
Fig.13 Curve of the robot’s attitude change under straight walking condition
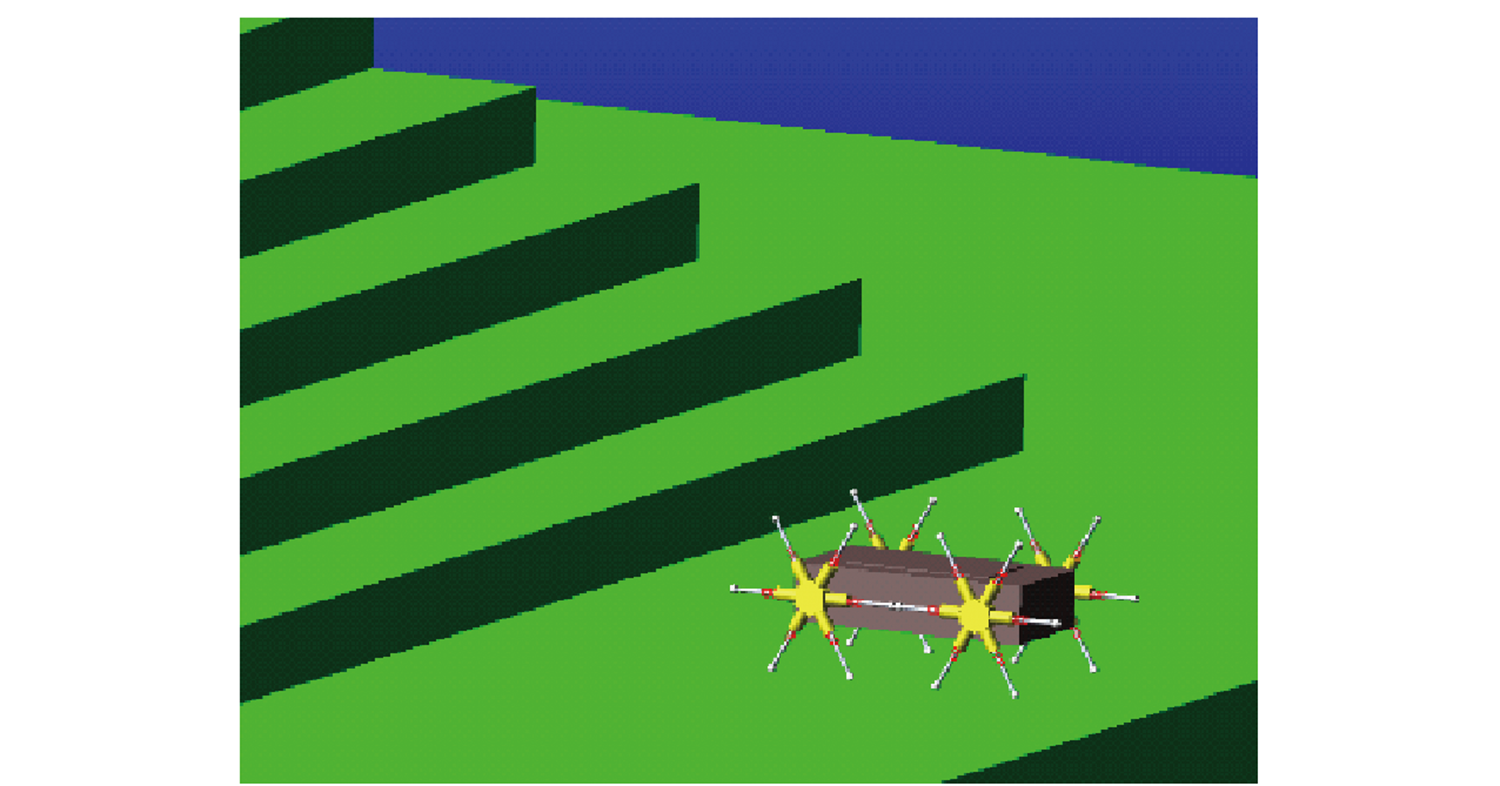
Fig.14 Simulation of the robot based on ADAMS software

Fig.15 Simulation of the robot climbing stairs
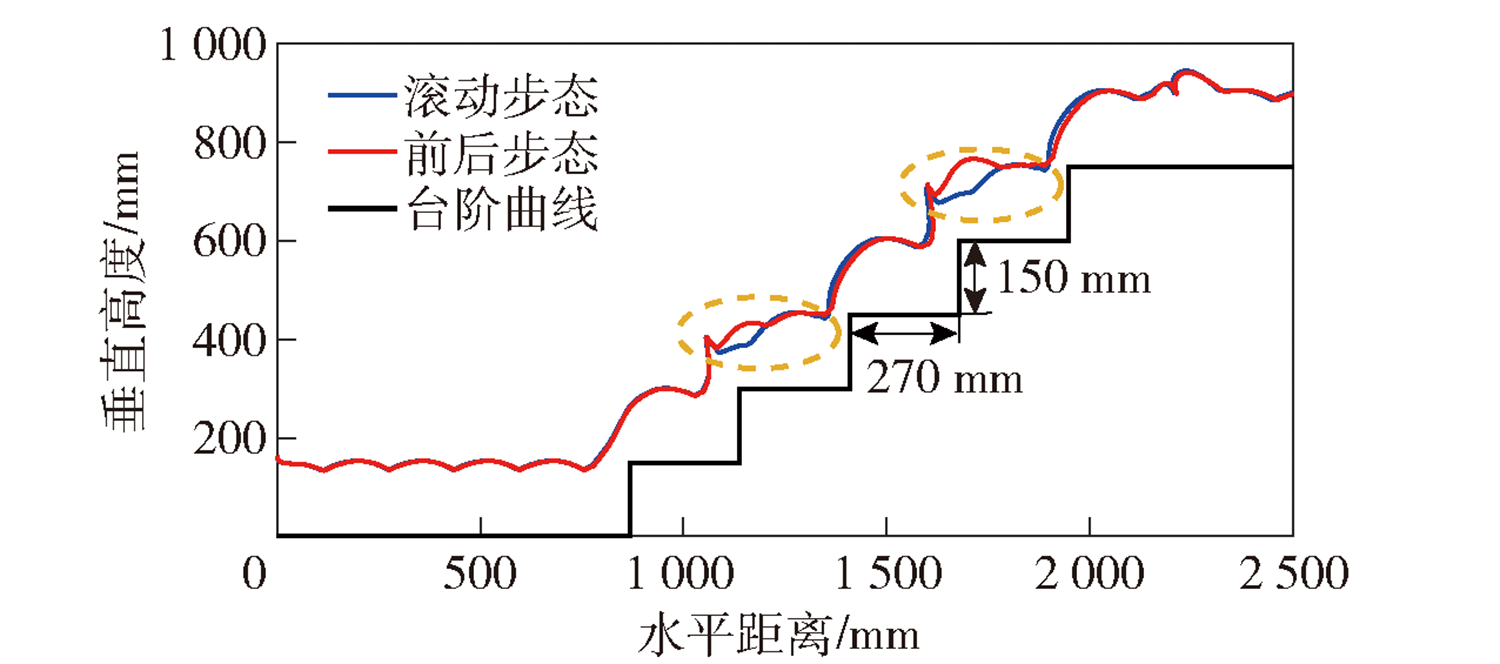
Fig.16 Curve of the robot’s centroid change when climbing stairs
| 台阶高度/mm | 台阶宽度/mm | 通过性 |
|---|---|---|
| 175 | 260 | 通过 |
| 175 | 300 | 通过 |
| 175 | 350 | 通过 |
| 150 | 260 | 通过 |
| 150 | 300 | 通过 |
| 150 | 350 | 通过 |
| 125 | 260 | 通过 |
| 125 | 300 | 通过 |
| 125 | 350 | 通过 |
Table 3 Stairs experiment results
| 台阶高度/mm | 台阶宽度/mm | 通过性 |
|---|---|---|
| 175 | 260 | 通过 |
| 175 | 300 | 通过 |
| 175 | 350 | 通过 |
| 150 | 260 | 通过 |
| 150 | 300 | 通过 |
| 150 | 350 | 通过 |
| 125 | 260 | 通过 |
| 125 | 300 | 通过 |
| 125 | 350 | 通过 |
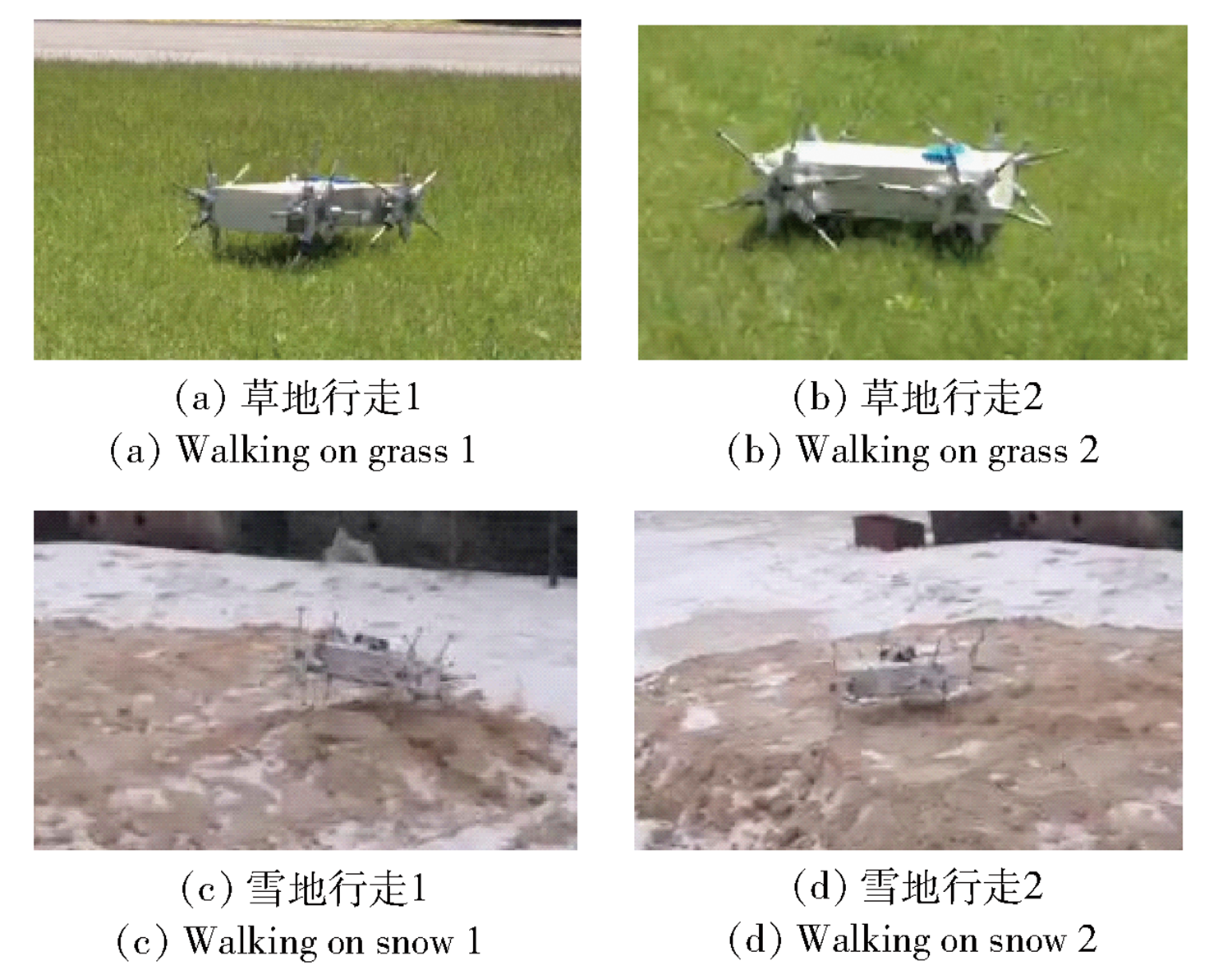
Fig.17 Experiment of the robot in complex terrain

Fig.18 Experiment of the robot climbing stairs
| [1] |
王鸿鹏, 杨云, 刘景泰. 高速移动机器人的研究现状与发展趋势[J]. 自动化与仪表, 2011, 26(12): 1-4.
|
|
|
|
| [2] |
doi: 10.1007/s00542-017-3424-7 URL |
| [3] |
|
| [4] |
王琪, 张秀丽, 江磊, 等. 具有2DOF铰接式躯干的仿猎豹四足奔跑机器人[J]. 机器人, 2022, 44(3): 257-266.
doi: 10.13973/j.cnki.robot.210101 |
|
doi: 10.13973/j.cnki.robot.210101 |
|
| [5] |
郭非, 汪首坤, 王军政. 轮足复合移动机器人运动规划发展现状及关键技术分析[J]. 控制与决策, 2022, 37(6): 1433-1444.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
曲梦可, 王洪波, 荣誉. 军用轮、 腿混合四足机器人设计[J]. 兵工学报, 2018, 39(4): 787-797.
doi: 10.3969/j.issn.1000-1093.2018.04.019 |
|
|
|
| [10] |
|
| [11] |
田润, 宋轶民, 孙涛, 等. 一种新型轮腿式移动机器人的参数设计与实验研究[J]. 机器人, 2015, 37(5): 538-545.
doi: 10.13973/j.cnki.robot.2015.0538 |
|
doi: 10.13973/j.cnki.robot.2015.0538 |
|
| [12] |
|
| [13] |
|
| [14] |
杨帆, 吴贺利, 罗晨晖. 一种轮腿式越障机器人的设计与分析[J]. 机械传动, 2017, 41(5): 198-203.
|
|
|
|
| [15] |
|
| [16] |
doi: 10.1109/TRO.2014.2365651 URL |
| [17] |
王银浩, 颉潭成, 徐彦伟, 等. 四足机器人侧摆型trot步态的运动学分析及仿真研究[J]. 现代制造工程, 2022(5): 24-29.
|
|
|
|
| [18] |
孟健, 李贻斌, 李彬. 四足机器人跳跃步态控制方法[J]. 山东大学学报:工学版, 2015, 45(3): 28-34.
|
|
|
|
| [19] |
李姗姗, 王洪波, 陈建宇, 等. 新型四足并联军用机器人步态控制算法及仿真研究[J]. 兵工学报, doi: 10.12382/bgxb.2021.0796.
doi: 10.12382/bgxb.2021.0796 |
|
doi: 10.12382/bgxb.2021.0796 |
|
| [20] |
芮宏斌, 李路路, 曹伟, 等. 轮-履-腿复合仿生机器人步态规划及越障性能分析[J]. 工程设计学报, 2022, 29(2): 133-142.
|
|
|
|
| [21] |
张楠, 姜文通, 牛宝山, 等. 轮腿式自动引导小车结构设计与行走步态规划[J]. 机械科学与技术, 2021, 40(2): 211-217.
|
|
|
| [1] | ZHANG Xuexue, XUE Zhihua, NIE Hongqi, YAN Qilong. Preparation of Energetic Burning Rate Inhibitor and Its Negative Catalytic Effect on AP Decomposition [J]. Acta Armamentarii, 2024, 45(1): 15-25. |
| [2] | CHEN Baihan, SHEN Zikai, ZOU Huihui, WANG Weiguang, WANG Kehui. Basic Evolution Characteristics of Oblique Penetration of Projectile against Hard Target [J]. Acta Armamentarii, 2023, 44(S1): 59-66. |
| [3] | CHEN Baihan, WANG Libin, ZOU Huihui, WANG Weiguang, WANG Kehui. Influence of Spin on the Penetration Effect of Projectile [J]. Acta Armamentarii, 2023, 44(S1): 117-124. |
| [4] | LI Dongyang, CHANG Sijiang, WANG Zhongyuan. Nonlinear Region of Attraction Estimation for Projectile’s Angular Motion [J]. Acta Armamentarii, 2023, 44(8): 2329-2341. |
| [5] | DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft [J]. Acta Armamentarii, 2023, 44(8): 2245-2262. |
| [6] | ZHOU Lin, NI Lei, LI Dongwei, ZHANG Xiangrong, LIU Haiqing, JIANG Tao, ZHU Yingzhong. Test Method for Anti-overload Performance of Explosives [J]. Acta Armamentarii, 2023, 44(6): 1722-1732. |
| [7] | SONG Jinchao, ZHAO Liangyu. Attitude Pursuit GuidanceLaw for Coning Motion Stability of Spinning Missiles [J]. Acta Armamentarii, 2023, 44(6): 1795-1808. |
| [8] | XI Xuechen, YANG Pengfei, WANG Kuanliang. Oscillations Characteristics of One-dimensional Detonation Waves in Non-Uniform Hydrogen-Air Mixture [J]. Acta Armamentarii, 2023, 44(4): 982-993. |
| [9] | ZHAO Huanjuan, LIU Keqing, PANG Lei, LIU Jing, LIN Min, DONG Shiming. Effect of Detonation Instability and Initial Pressure on Track Angle of Spinning Detonation [J]. Acta Armamentarii, 2023, 44(4): 1086-1096. |
| [10] | ZHANG Ning, LIN Haihua, SUN Yaping, LI Zongji, WANG Shizhe. Analysis of Petri Net Model and Index Demonstration for Torpedo Equipment Testing and Maintenance [J]. Acta Armamentarii, 2023, 44(3): 886-894. |
| [11] | SHANG Zhe, WANG Ting, XU Yao, WU Yingbiao, SHAO Peiyao, SHAO Shiliang. Structural Design and Obstacle-surmounting Dynamics Research of Six-wheeled Rocker-type Mobile Robot [J]. Acta Armamentarii, 2023, 44(11): 3478-3488. |
| [12] | YUAN Shusen, DENG Wenxiang, YAO Jianyong, YANG Guolai. Adaptive Integral Robust Control for the Bidirectional Stability System of All-electric Tanks [J]. Acta Armamentarii, 2023, 44(1): 140-155. |
| [13] | XU Haoxuan, MA Xiaojun, LIU Chunguang. Large-Signal Stability of On-board DC Microgrids for Hybrid Electric Armored Vehicles [J]. Acta Armamentarii, 2023, 44(1): 108-116. |
| [14] | LIU Lin, GONG Chen, LI Mengmeng, WANG Ran. RMSST Design Based on Virtual Reality [J]. Acta Armamentarii, 2022, 43(S1): 208-213. |
| [15] | YU Haomiao, LIU Chengwei, GUO Chen, JIA Zhaoyan. Finite-time Path-following Controller for UUV Based on PSO-NTSMC [J]. Acta Armamentarii, 2022, 43(8): 1939-1946. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||