
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (8): 2207-2223.doi: 10.12382/bgxb.2022.0247
Previous Articles Next Articles
WANG Mengyang1,2, ZHANG Dong1,2,*( ), TANG Shuo1,2, XU Bin3, ZHAO Junmin4
), TANG Shuo1,2, XU Bin3, ZHAO Junmin4
Received:2022-04-11
Online:2023-08-30
Contact:
ZHANG Dong
CLC Number:
WANG Mengyang, ZHANG Dong, TANG Shuo, XU Bin, ZHAO Junmin. UAV Swarm On-line Mission Planning Method Based on Dynamic Allocation Strategy[J]. Acta Armamentarii, 2023, 44(8): 2207-2223.
Add to citation manager EndNote|Ris|BibTeX
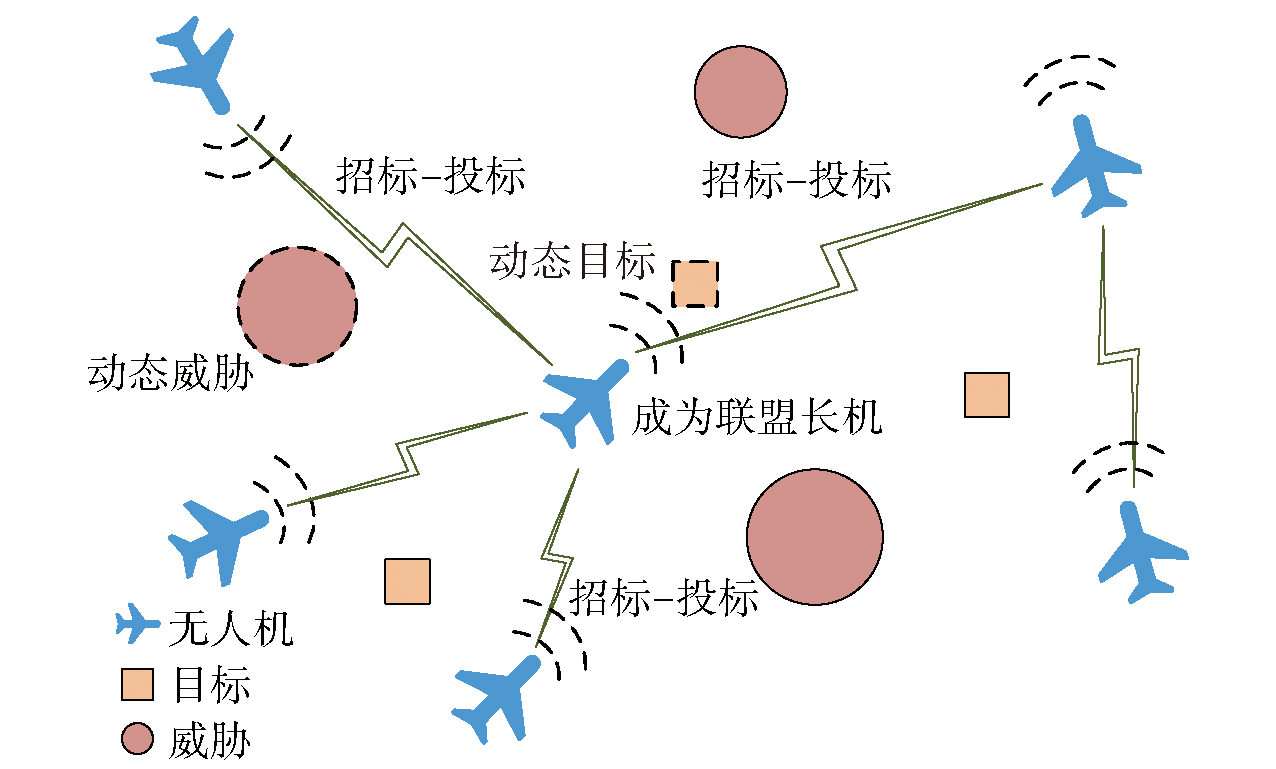
Fig.1 Diagram of UAV swarm cooperative dynamic mission
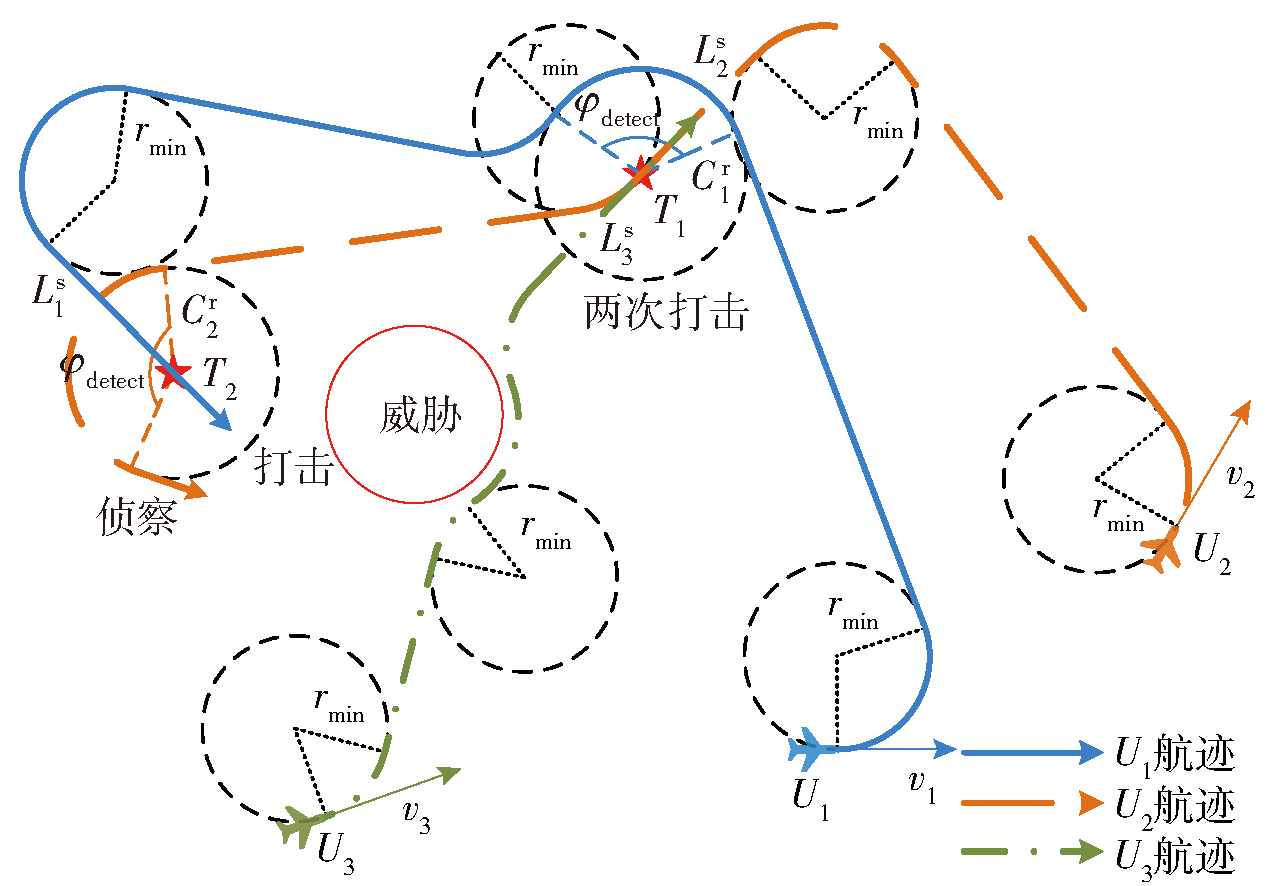
Fig.2 Geometric representation of trajectory constraints
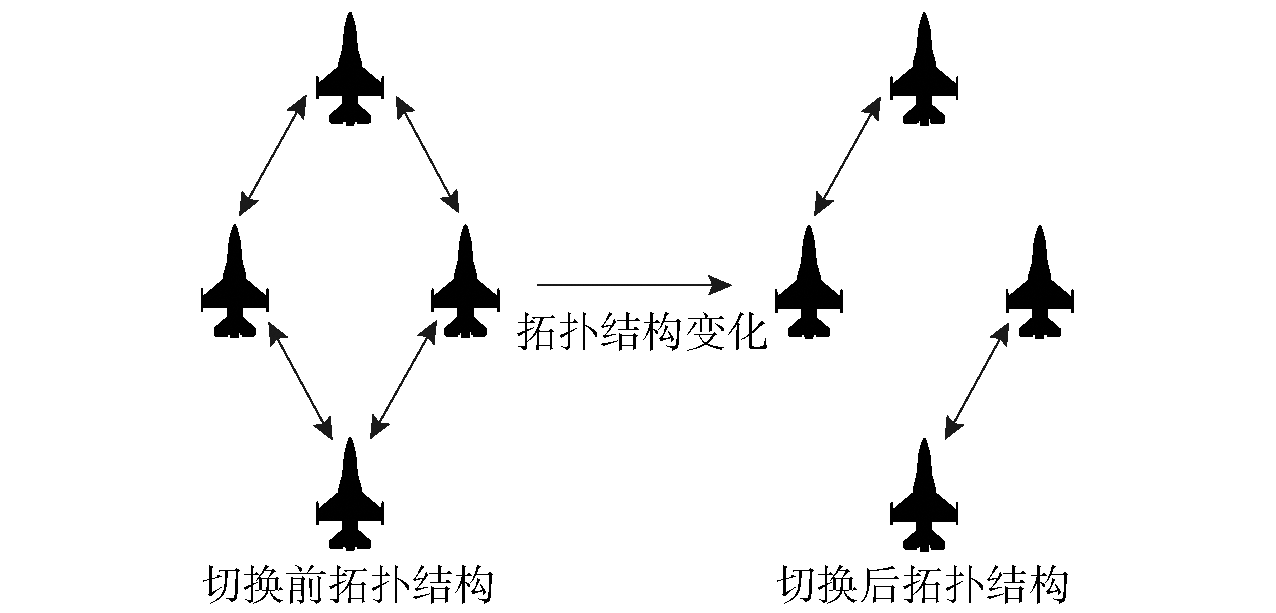
Fig.3 Network communication topology
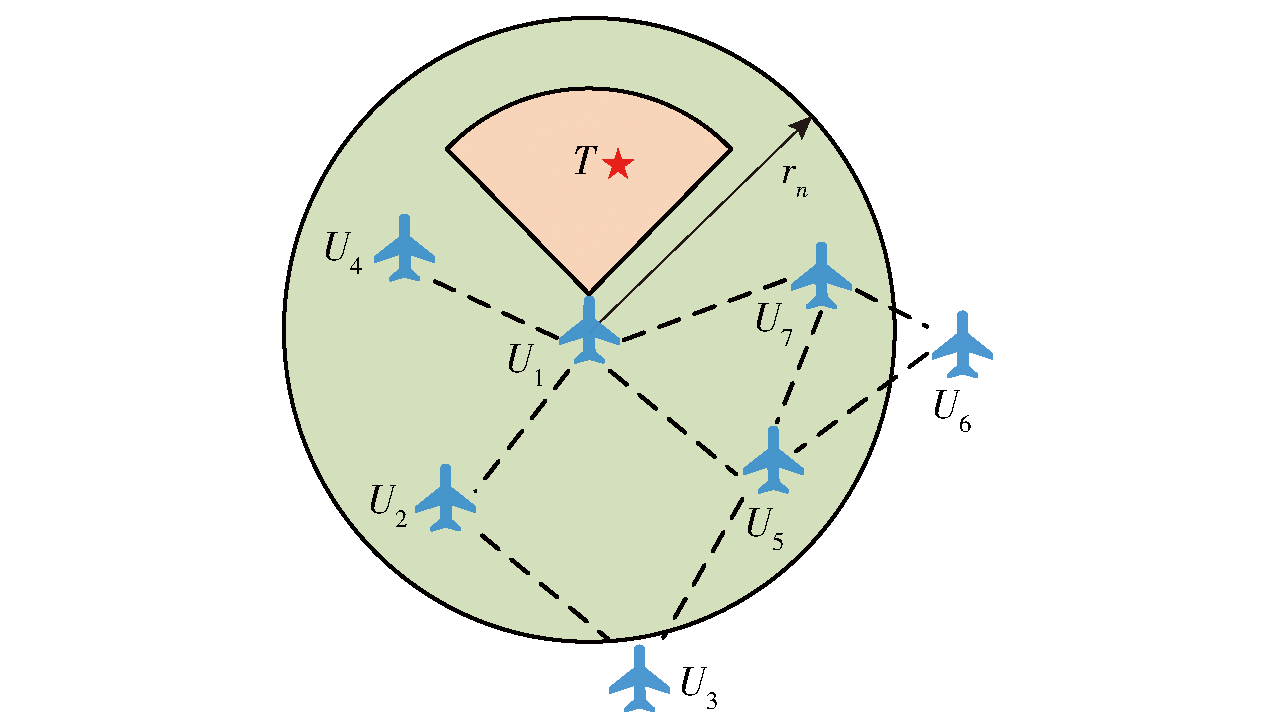
Fig.4 Diagram of UAV swarm communication
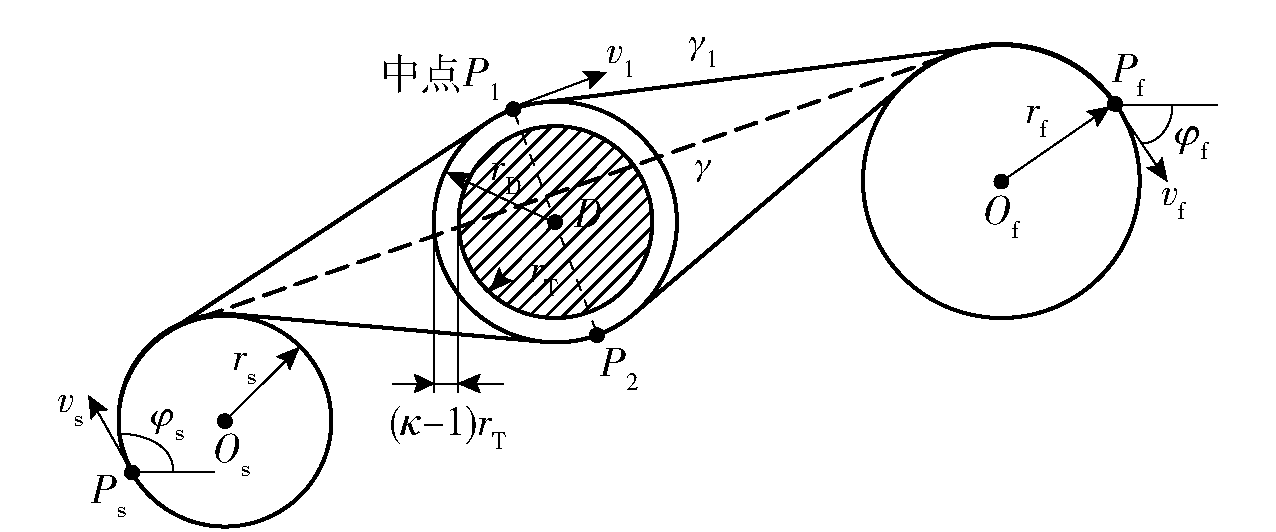
Fig.5 Diagram of threat avoidance path
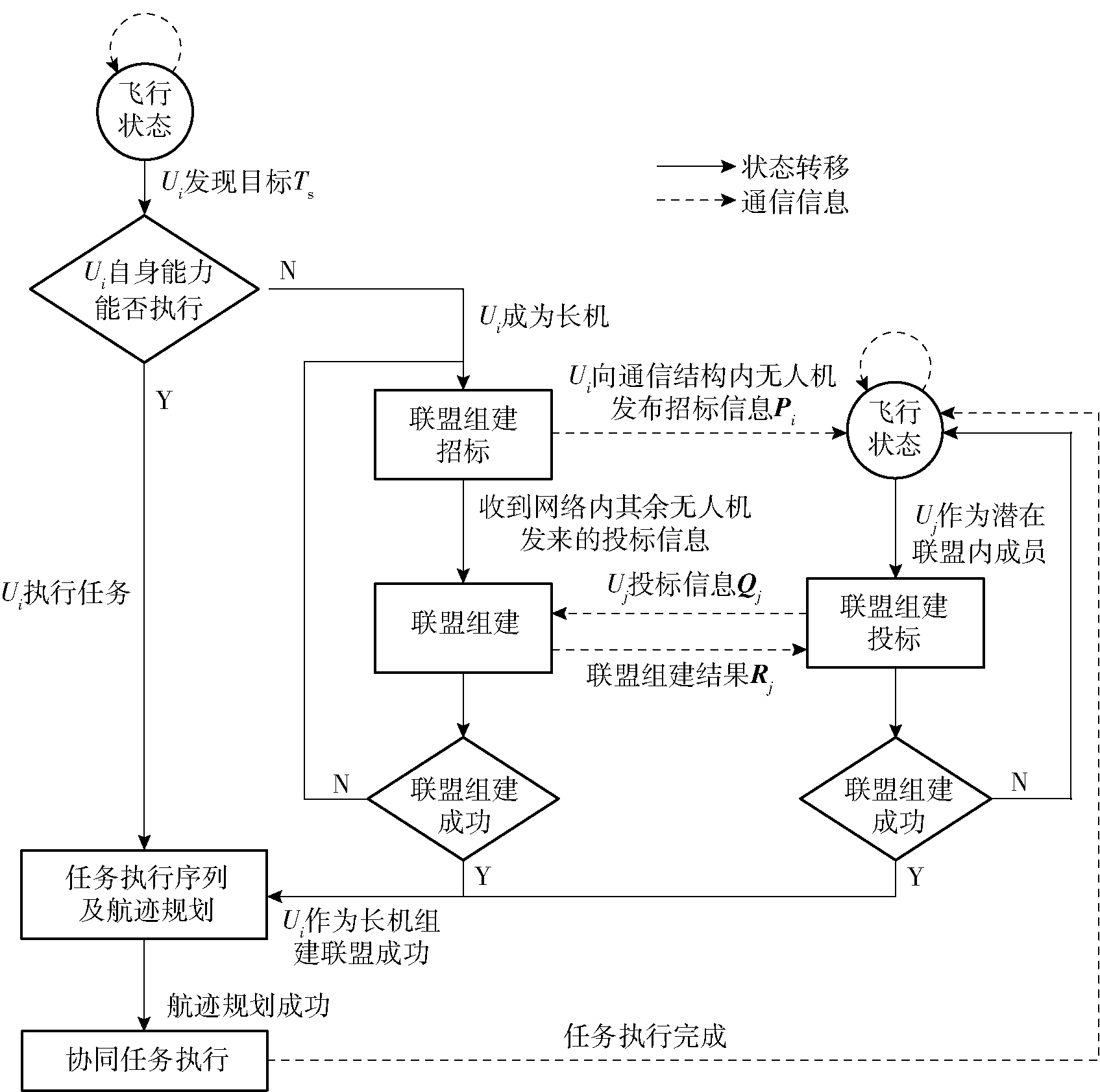
Fig.6 Status and communication transition rule
| UAV 编号 | 初始位置/m | 最大 航程/m | 飞行速度/ (m·s-1) | 任务能力 | 打击载 荷数量 |
|---|---|---|---|---|---|
| U1 | (2200,2000,300) | 18000 | 50 | (R,S,E) | 2 |
| U2 | (4000,1900,300) | 18000 | 50 | (R,S,E) | 2 |
| U3 | (2500,5000,300) | 18000 | 50 | (R,S,E) | 2 |
| U4 | (3000,5500,300) | 18000 | 50 | (R,S,E) | 2 |
| U5 | (4000,4000,300) | 18000 | 50 | (R,S,E) | 2 |
| U6 | (5000,4500,300) | 18000 | 50 | (R,S,E) | 2 |
| U7 | (6500,3000,300) | 18000 | 50 | (R,S,E) | 1 |
| U8 | (5800,2300,300) | 18000 | 50 | (R,S,E) | 1 |
| U9 | (5200,3800,300) | 18000 | 50 | (R,S,E) | 1 |
| U10 | (6700,4200,300) | 18000 | 50 | (R,S,E) | 1 |
| U11 | (5500,2000,300) | 18000 | 50 | (R,S,E) | 1 |
| U12 | (5000,1000,500) | 26000 | 60 | (S) | 4 |
| U13 | (1000,1000,500) | 26000 | 60 | (S) | 4 |
| U14 | (6000,6000,500) | 26000 | 60 | (S) | 4 |
| U15 | (5900,6500,500) | 26000 | 60 | (S) | 4 |
| U16 | (2800,2000,500) | 26000 | 60 | (S) | 4 |
| U17 | (1600,1600,500) | 26000 | 60 | (S) | 4 |
| U18 | (3000,3050,500) | 26000 | 60 | (S) | 4 |
| U19 | (2500,2800,500) | 26000 | 60 | (S) | 4 |
| U20 | (5600,5800,500) | 26000 | 60 | (S) | 4 |
| U21 | (1800,3550,500) | 26000 | 60 | (S) | 4 |
| U22 | (2800,2100,500) | 26000 | 60 | (S) | 4 |
| U23 | (6000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U24 | (1000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U25 | (8000,7000,400) | 20000 | 50 | (R,E) | 0 |
| U26 | (1500,3800,400) | 20000 | 50 | (R,E) | 0 |
| U27 | (3000,4500,400) | 20000 | 50 | (R,E) | 0 |
| U28 | (3000,2800,400) | 20000 | 50 | (R,E) | 0 |
| U29 | (2800,4000,400) | 20000 | 50 | (R,E) | 0 |
| U30 | (3800,2100,400) | 20000 | 50 | (R,E) | 0 |
| U31 | (2200,2500,400) | 20000 | 50 | (R,E) | 0 |
| U32 | (2800,1800,400) | 20000 | 50 | (R,E) | 0 |
Table 1 Initial information of each UAV
| UAV 编号 | 初始位置/m | 最大 航程/m | 飞行速度/ (m·s-1) | 任务能力 | 打击载 荷数量 |
|---|---|---|---|---|---|
| U1 | (2200,2000,300) | 18000 | 50 | (R,S,E) | 2 |
| U2 | (4000,1900,300) | 18000 | 50 | (R,S,E) | 2 |
| U3 | (2500,5000,300) | 18000 | 50 | (R,S,E) | 2 |
| U4 | (3000,5500,300) | 18000 | 50 | (R,S,E) | 2 |
| U5 | (4000,4000,300) | 18000 | 50 | (R,S,E) | 2 |
| U6 | (5000,4500,300) | 18000 | 50 | (R,S,E) | 2 |
| U7 | (6500,3000,300) | 18000 | 50 | (R,S,E) | 1 |
| U8 | (5800,2300,300) | 18000 | 50 | (R,S,E) | 1 |
| U9 | (5200,3800,300) | 18000 | 50 | (R,S,E) | 1 |
| U10 | (6700,4200,300) | 18000 | 50 | (R,S,E) | 1 |
| U11 | (5500,2000,300) | 18000 | 50 | (R,S,E) | 1 |
| U12 | (5000,1000,500) | 26000 | 60 | (S) | 4 |
| U13 | (1000,1000,500) | 26000 | 60 | (S) | 4 |
| U14 | (6000,6000,500) | 26000 | 60 | (S) | 4 |
| U15 | (5900,6500,500) | 26000 | 60 | (S) | 4 |
| U16 | (2800,2000,500) | 26000 | 60 | (S) | 4 |
| U17 | (1600,1600,500) | 26000 | 60 | (S) | 4 |
| U18 | (3000,3050,500) | 26000 | 60 | (S) | 4 |
| U19 | (2500,2800,500) | 26000 | 60 | (S) | 4 |
| U20 | (5600,5800,500) | 26000 | 60 | (S) | 4 |
| U21 | (1800,3550,500) | 26000 | 60 | (S) | 4 |
| U22 | (2800,2100,500) | 26000 | 60 | (S) | 4 |
| U23 | (6000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U24 | (1000,2000,400) | 20000 | 50 | (R,E) | 0 |
| U25 | (8000,7000,400) | 20000 | 50 | (R,E) | 0 |
| U26 | (1500,3800,400) | 20000 | 50 | (R,E) | 0 |
| U27 | (3000,4500,400) | 20000 | 50 | (R,E) | 0 |
| U28 | (3000,2800,400) | 20000 | 50 | (R,E) | 0 |
| U29 | (2800,4000,400) | 20000 | 50 | (R,E) | 0 |
| U30 | (3800,2100,400) | 20000 | 50 | (R,E) | 0 |
| U31 | (2200,2500,400) | 20000 | 50 | (R,E) | 0 |
| U32 | (2800,1800,400) | 20000 | 50 | (R,E) | 0 |
| 目标编号 | 初始位置/m | 待执行任务列表 | 侦察时间/s |
|---|---|---|---|
| 1 | (3500,2800,1) | (R, S, E) | 20 |
| 2 | (1000,500,1) | (R, S, E) | 30 |
| 3 | (4500,5000,1) | (R, S, E) | 30 |
Table 2 Initial information of each target
| 目标编号 | 初始位置/m | 待执行任务列表 | 侦察时间/s |
|---|---|---|---|
| 1 | (3500,2800,1) | (R, S, E) | 20 |
| 2 | (1000,500,1) | (R, S, E) | 30 |
| 3 | (4500,5000,1) | (R, S, E) | 30 |
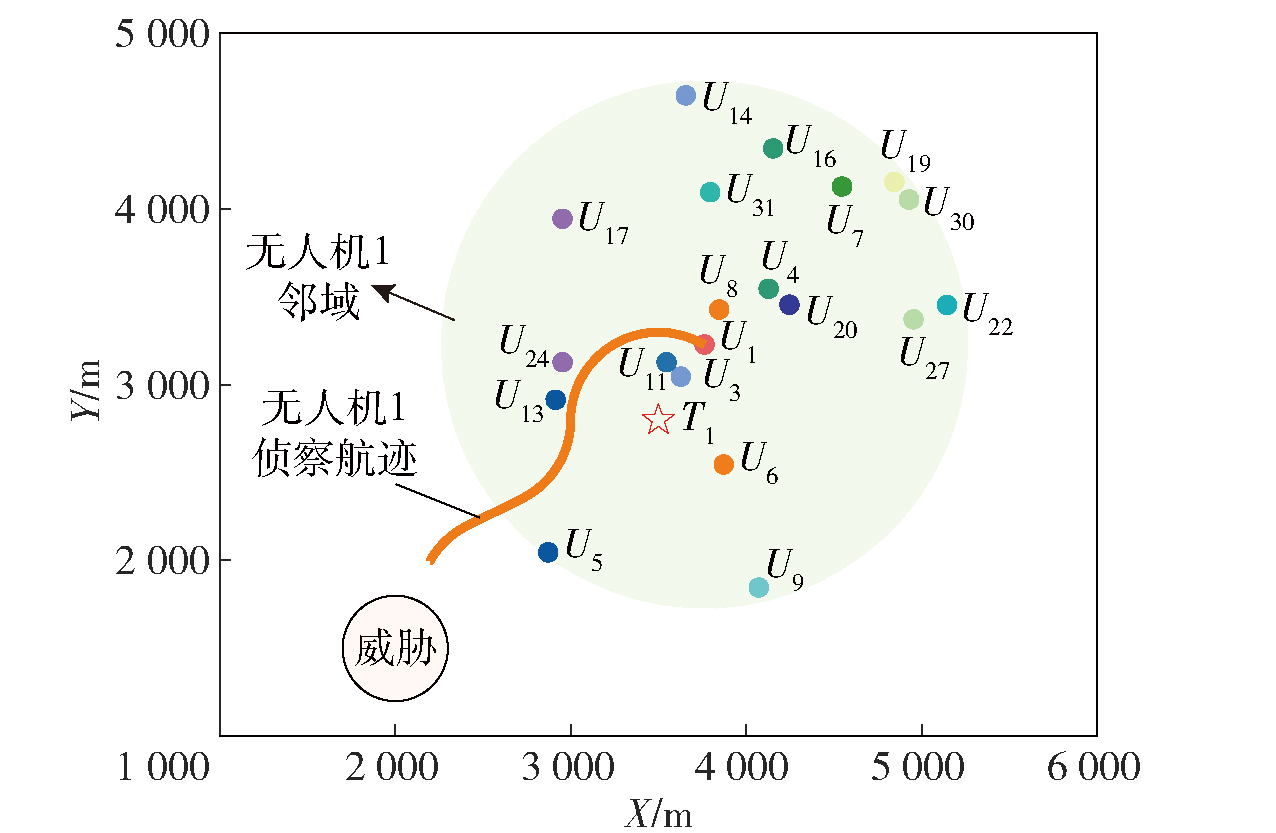
Fig.7 Tender status of U1
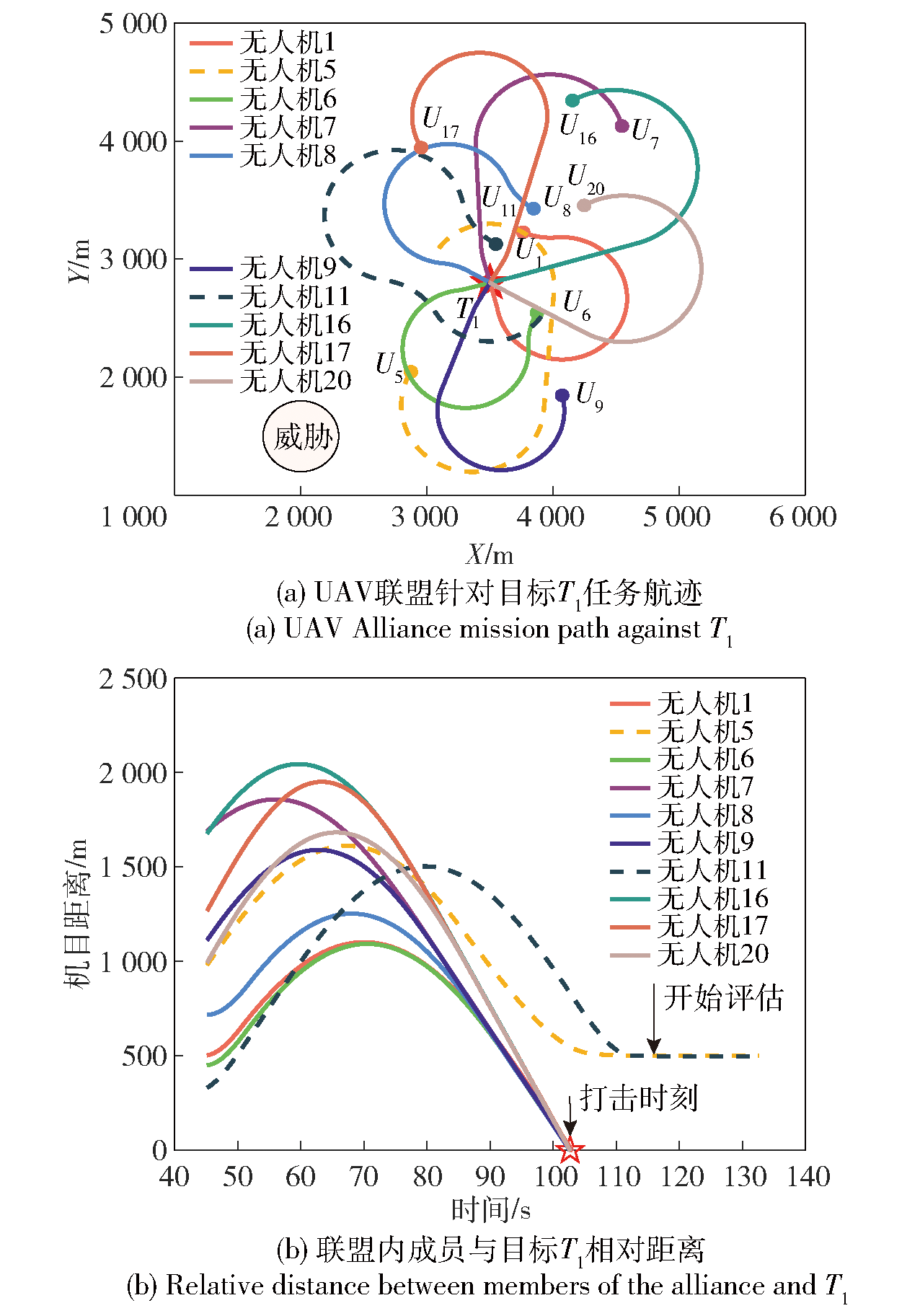
Fig.8 At t=43.92s, the mission planning result of UAV alliance for target T1

Fig.9 At t=54.23s, the mission planning result of UAV alliance for target T3
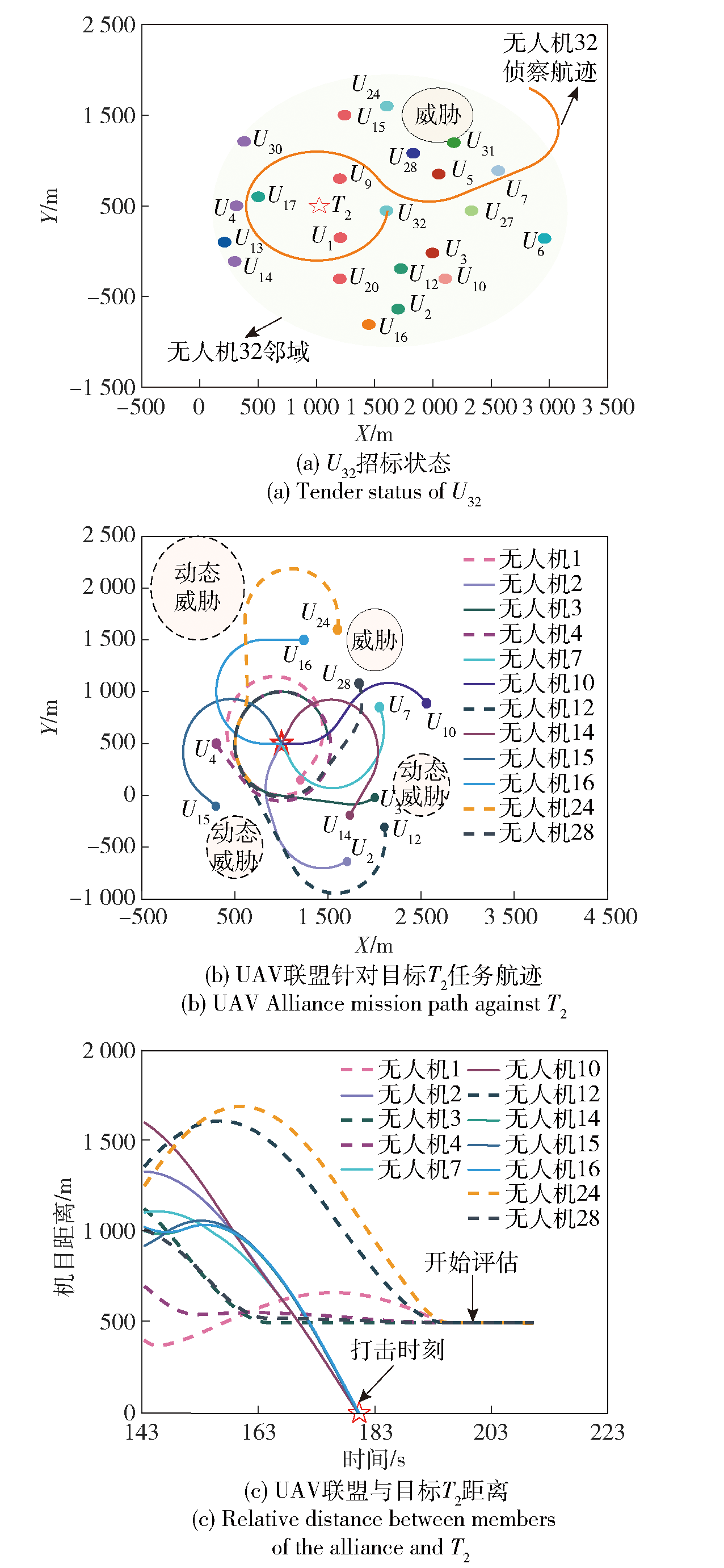
Fig.10 At t=142.28s, the mission planning result of UAV alliance for target T2
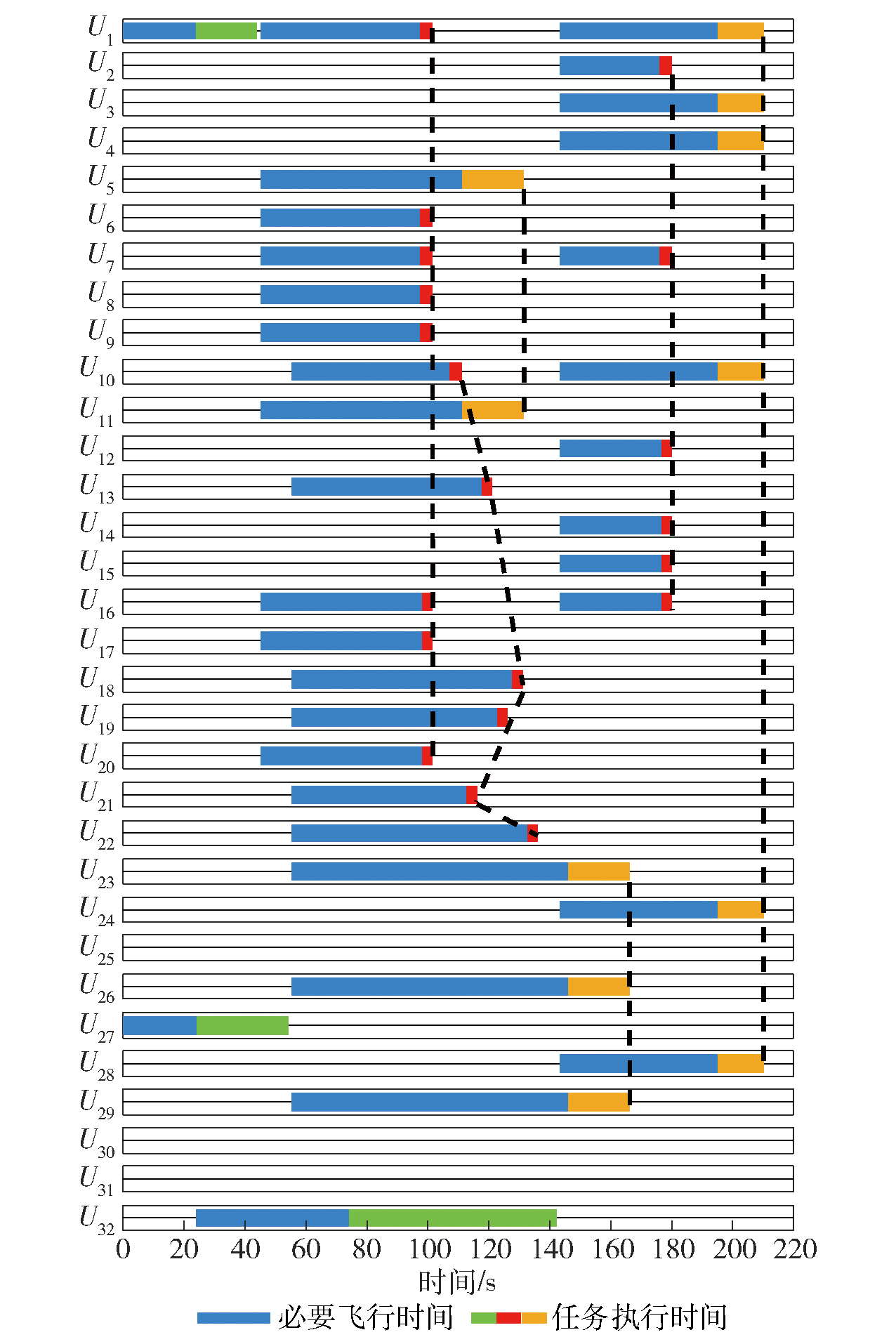
Fig.11 Mission sequence of UAV swarm
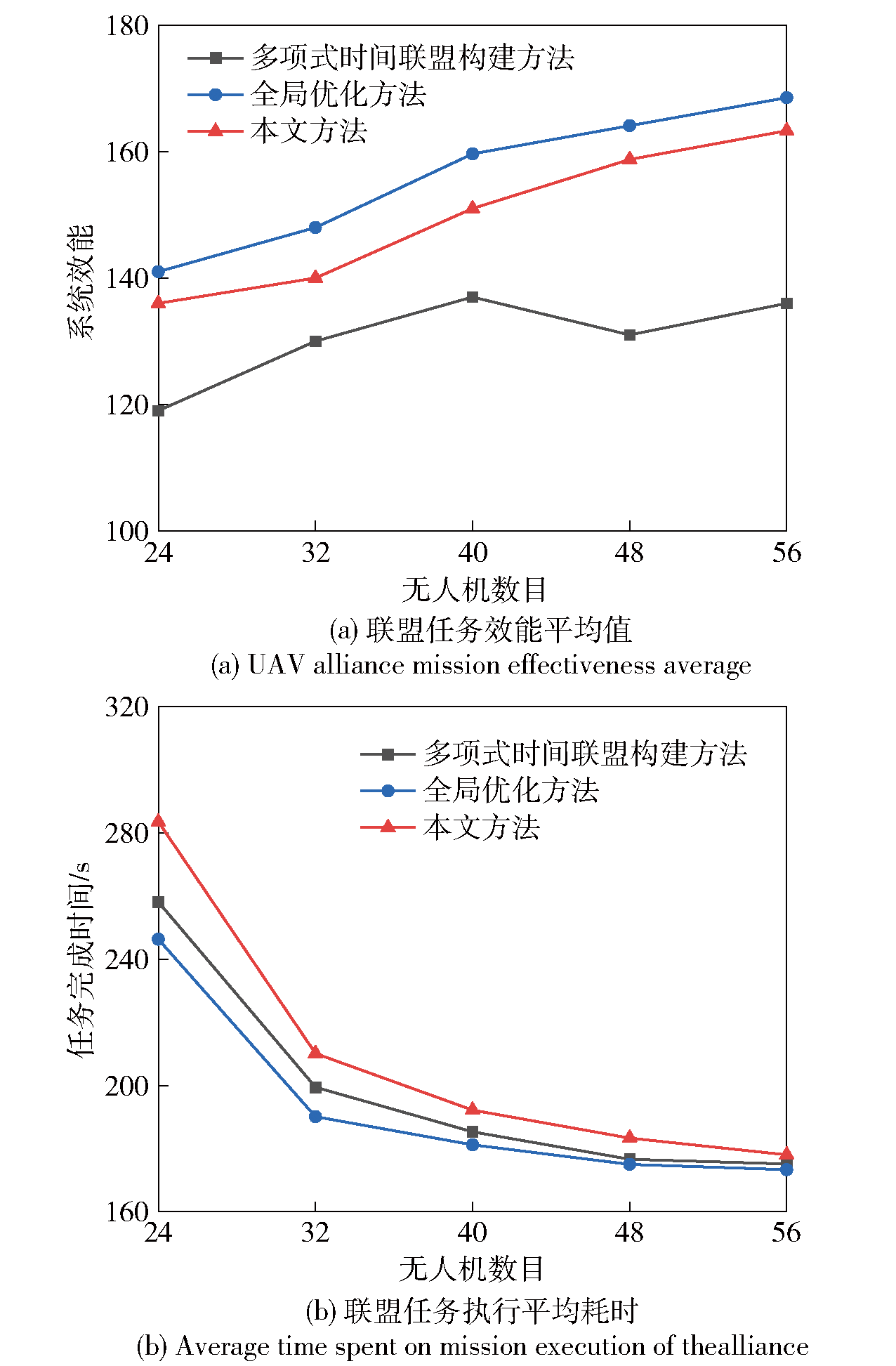
Fig.12 Performance comparison of three alliance formation-lgorithms with increasing number of UAV
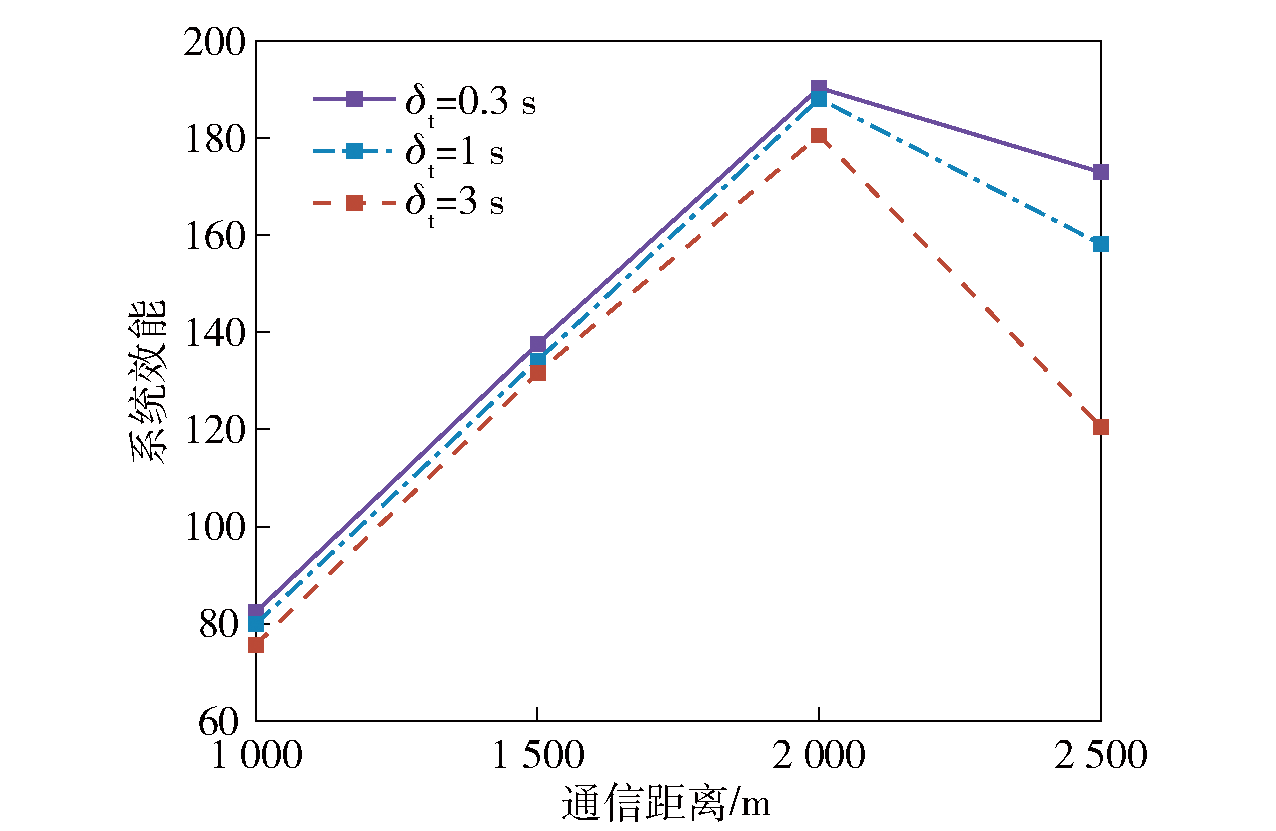
Fig.13 Influence of communication constraints on the proposed mission effectiveness method

Fig.14 Hardware-in-the-loop (HIL) simulation with virtual and real experimental arrangement
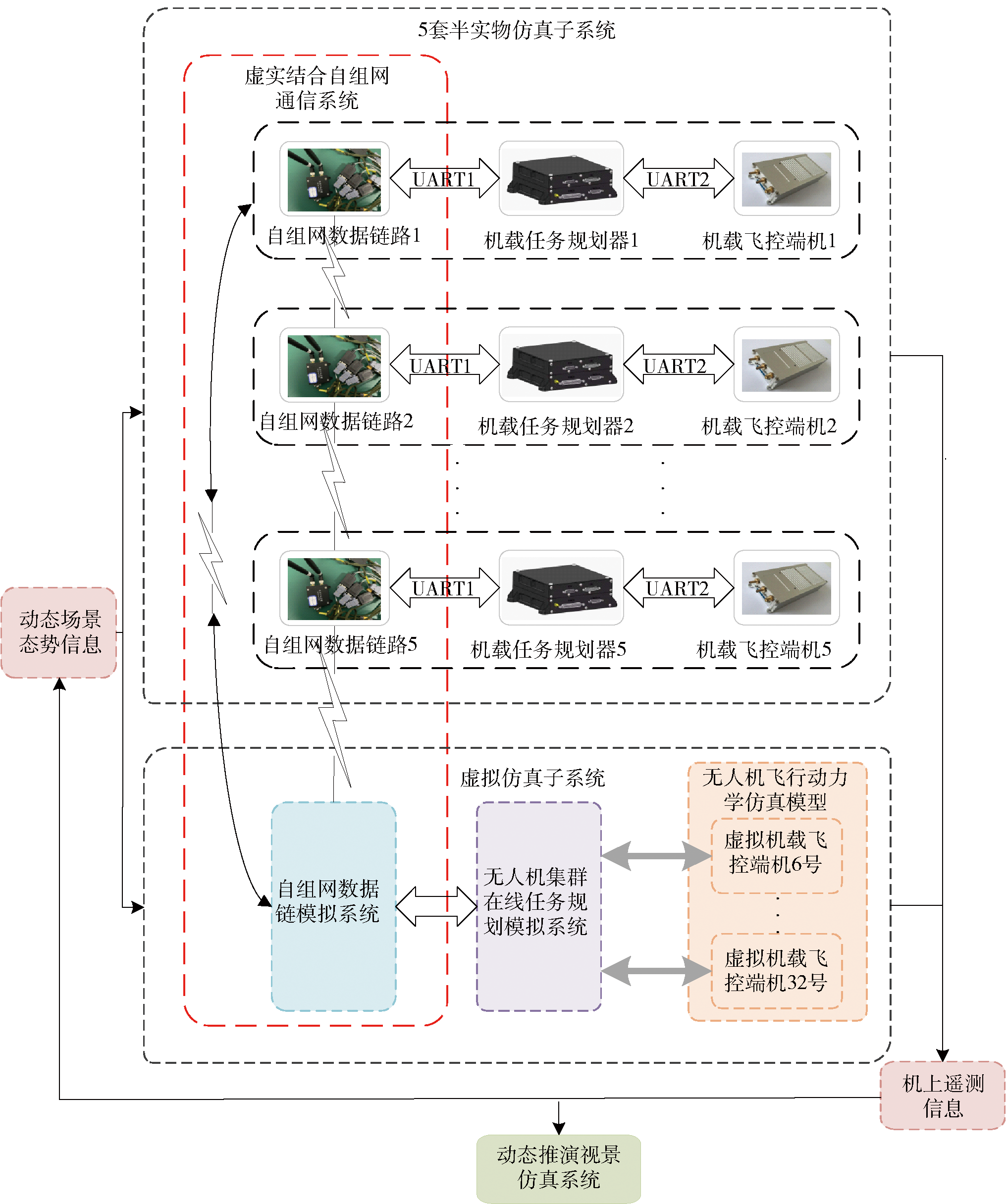
Fig.15 Schematic diagram of the UAV swarm’s HIL simulation with virtual and real systems

Fig.16 Two-dimensional display of HIL simulation flight effects
| [1] |
贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(增刊1): 4-14.
|
|
|
|
| [2] |
|
| [3] |
doi: 10.1016/j.swevo.2016.12.005 URL |
| [4] |
甄子洋, 江驹, 孙绍山, 等. 无人机集群作战协同控制与决策[M]. 北京: 国防工业出版社, 2022: 1-35.
|
|
|
|
| [5] |
贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2019, 43(1): 99-111.
|
|
|
|
| [6] |
doi: 10.1016/j.endm.2018.03.018 URL |
| [7] |
|
| [8] |
doi: 10.1002/rnc.v30.14 URL |
| [9] |
doi: 10.1109/TMC.7755 URL |
| [10] |
朱云冲, 梁彦刚, 黎克波, 等. 基于PSO和RRT的智能弹群任务分配算法[J/OL]. 航空学报, 2022.(2022-07-12) [2022-08-22]. http://kns.cnki.net/kcms/detail/11.1929.V.20220710.1634.028.html
|
|
|
|
| [11] |
李桂亮, 毕海洋, 洪雪健, 等. 基于DE-DPSO-GT-SA算法的协同多任务分配[J]. 北京航空航天大学学报, 2021, 47(1): 90-96.
|
|
|
|
| [12] |
doi: 10.1109/TAES.2018.2831138 URL |
| [13] |
doi: 10.1016/j.cja.2017.09.005 URL |
| [14] |
doi: 10.1016/j.ast.2018.01.025 URL |
| [15] |
|
| [16] |
doi: 10.1109/ACCESS.2019.2952468 |
| [17] |
doi: 10.1109/Access.6287639 URL |
| [18] |
doi: 10.1007/s42405-019-00205-1 |
| [19] |
|
| [20] |
刘重, 高晓光, 符小卫, 等. 未知环境下异构多无人机协同搜索打击中的联盟组建[J]. 兵工学报, 2015, 36(12): 2284-2297.
doi: 10.3969/j.issn.1000-1093.2015.12.011 |
|
|
|
| [21] |
符小卫, 魏可, 李斌, 等. 基于联盟的无人机集群编队控制方法[J]. 系统工程与电子技术, 2019, 41(11): 2559-2572.
|
|
|
|
| [22] |
doi: 10.1016/j.ast.2021.107054 URL |
| [23] |
|
| [24] |
陈璞, 严飞, 刘钊, 等. 通信约束下异构多无人机任务分配方法[J]. 航空学报, 2021, 42(8): 313-326.
|
|
|
|
| [25] |
doi: 10.1016/j.cja.2013.07.009 URL |
| [26] |
doi: 10.1016/j.ast.2018.05.039 URL |
| [27] |
吴钟博, 易建强. 无人机编队支撑网络的协同通信中继策略[J]. 航空学报, 2020, 41(增刊2): 187-194.
|
|
|
|
| [28] |
陈清阳, 辛宏博, 王玉杰, 等. 一种多机协同打击的快速航迹规划方法[J]. 北京航空航天大学学报, 2019, 48(7):1145-1153.
|
|
|
|
| [29] |
苏菲, 陈岩, 沈林成. 基于蚁群算法的无人机协同多任务分配[J]. 航空学报, 2008, 29(增刊): 184-191.
|
|
|
| [1] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [2] | GUO Zhiming, LOU Wenzhong, LI Tao, ZHANG Mengyu, BAI Zilong, QIAO Hu. Collaborative Route Planning of Multiple Unmanned Aerial Vehicles Considering Task Threats Based on Improved Grasshopper Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(S2): 52-60. |
| [3] | LI Siqi, GONG Peng, SHAN Dan, LI Jianfeng, LIU Yu, GAO Xiang. Design and Implementation of Hardware-in-the-loop Test Architecture for UAV Information Attack Based on QualNet [J]. Acta Armamentarii, 2023, 44(9): 2709-2721. |
| [4] | HUANG Feng, WANG Weixiong, LIN Zhonglin, WU Xianyu, ZHUANG Jiaquan. Design and Experimental Study of a Novel Semi-physical Simulation Platform for Visual Navigation of Quadrotor UAVs [J]. Acta Armamentarii, 2023, 44(9): 2836-2848. |
| [5] | LIU Xingyu, GUO Ronghua, REN Chengcai, YAN Chao, CHANG Yuan, ZHOU Han, XIANG Xiaojia. Distributed Target Assignment Method for UAV Swarms Using Identity Hungarian Algorithm [J]. Acta Armamentarii, 2023, 44(9): 2824-2835. |
| [6] | YAN Yuwen, BI Wenhao, ZHANG An, ZHANG Baichuan. Task Allocation Method of UAV Clusters Based on Sequence Generative Adversarial Network [J]. Acta Armamentarii, 2023, 44(9): 2672-2684. |
| [7] | XU Wei, SU Bo, JIANG Lei, YAN Tong, XU Peng, WANG Zhirui, QIU Tianqi. Key Technologies and Application Prospects of Off-road Legged Robot Swarm System [J]. Acta Armamentarii, 2023, 44(9): 2568-2579. |
| [8] | GONG Yuanqiang, ZHANG Yepeng, MA Wanpeng, XUE Xiao. Mechanisms of Group Intelligence Emergence in UAV Swarms [J]. Acta Armamentarii, 2023, 44(9): 2661-2671. |
| [9] | LI Chao, WANG Ruixing, HUANG Jianzhong, JIANG Feilong, WEI Xuemei, SUN Yanxin. Autonomous Decision-making and Intelligent Collaboration of UAV Swarms Based on Reinforcement Learning with Sparse Rewards [J]. Acta Armamentarii, 2023, 44(6): 1537-1546. |
| [10] | ZHANG Jiandong, WANG Dinghan, YANG Qiming, SHI Guoqing, LU Yi, ZHANG Yaozhong. Multi-Dimensional Decision-Making for UAV Air Combat Based on Hierarchical Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(6): 1547-1563. |
| [11] | DU Weiwei, CHEN Xiaowei. Task Assignment and Optimization Method of Tactical-Level Army Operations [J]. Acta Armamentarii, 2023, 44(5): 1431-1442. |
| [12] | ZHAO Fei, LOU Wenzhong, FENG Huanzhen, SU Zilong, WANG Jinkui, XUAN Weikun. Long-Distance Aerial Target Detection Technology of Counter-UAV Image Seeker [J]. Acta Armamentarii, 2023, 44(4): 1023-1033. |
| [13] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [14] | BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game [J]. Acta Armamentarii, 2023, 44(11): 3407-3421. |
| [15] | ZHANG Qi, GE Yuxue, LI Pan, KANG Qijun, PEI Yang. Evaluation Method for SoS Contribution Rate of All-optical UAV Swarm Based on ABMS [J]. Acta Armamentarii, 2023, 44(11): 3422-3435. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||