
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240583-.doi: 10.12382/bgxb.2024.0583
Previous Articles Next Articles
LENG Chengyu, ZHAO Jin*( ), LIU Chang, YANG Shifeng
), LIU Chang, YANG Shifeng
Received:2024-07-15
Online:2025-06-28
Contact:
ZHAO Jin
CLC Number:
LENG Chengyu, ZHAO Jin, LIU Chang, YANG Shifeng. Construction of Special Obstacle Dataset and Detection Algorithm Evaluation System in Air-ground Collaborative Scenarios[J]. Acta Armamentarii, 2025, 46(6): 240583-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Implementation process based on special obstacle detection
| 数据集 | 视角 | 障碍物类别 | 场景覆盖 |
|---|---|---|---|
| GRACO数据集[ | 地面, 空中 | 建筑相关障碍物 | 静态城市建筑 |
| UDTIRI数据集[ | 地面 | 道路坑洞 | 城市道路 |
| GRDDC数据集[ | 地面 | 道路裂缝、坑洞 | 道路环境 |
| NPDOID数据集[ | 地面 | 坑洼障碍物 | 道路环境 |
| 本文数据集 | 地面, 空中 | 常规障碍物(行人、车辆等) 特殊障碍物(石块、水坑等) | 空地协同 动态场景 |
Table 1 Comparative analysis of viewpoints,categories,and scene coverage in obstacle detection datasets
| 数据集 | 视角 | 障碍物类别 | 场景覆盖 |
|---|---|---|---|
| GRACO数据集[ | 地面, 空中 | 建筑相关障碍物 | 静态城市建筑 |
| UDTIRI数据集[ | 地面 | 道路坑洞 | 城市道路 |
| GRDDC数据集[ | 地面 | 道路裂缝、坑洞 | 道路环境 |
| NPDOID数据集[ | 地面 | 坑洼障碍物 | 道路环境 |
| 本文数据集 | 地面, 空中 | 常规障碍物(行人、车辆等) 特殊障碍物(石块、水坑等) | 空地协同 动态场景 |
| 特殊障碍 物对象 | 标注数目 | 潜在特殊障 碍物对象 | 标注数目 |
|---|---|---|---|
| 坑洞 | 48509 | 物料堆 | 1684 |
| 水面 | 22384 | 管道 | 2383 |
| 沟槽 | 1315 | 石块 | 21948 |
Table 2 Category names and annotation counts of potential special obstacles and special obstacles
| 特殊障碍 物对象 | 标注数目 | 潜在特殊障 碍物对象 | 标注数目 |
|---|---|---|---|
| 坑洞 | 48509 | 物料堆 | 1684 |
| 水面 | 22384 | 管道 | 2383 |
| 沟槽 | 1315 | 石块 | 21948 |
| 常规障碍 物对象 | 标注数目 | 常规障碍 物对象 | 标注数目 |
|---|---|---|---|
| 三轮车 | 3844 | 摩托车 | 36107 |
| 自行车 | 11678 | 行人 | 95716 |
| 公交车 | 8241 | 卡车 | 14626 |
| 汽车 | 168283 | 面包车 | 29948 |
Table 3 Category names and annotation counts of regular obstacles
| 常规障碍 物对象 | 标注数目 | 常规障碍 物对象 | 标注数目 |
|---|---|---|---|
| 三轮车 | 3844 | 摩托车 | 36107 |
| 自行车 | 11678 | 行人 | 95716 |
| 公交车 | 8241 | 卡车 | 14626 |
| 汽车 | 168283 | 面包车 | 29948 |

Fig.2 The results of object detection

Fig.3 The distance from pothole to UAV identified by RGB-D camera

Fig.4 Boundary extension strategy to calculate the depth of potholes

Fig.5 Use RGB-D camera to identify the distance between the water surface, puddle and UAV

Fig.6 Interaction between obstacles,such as water surfaces and puddles,and visual maps
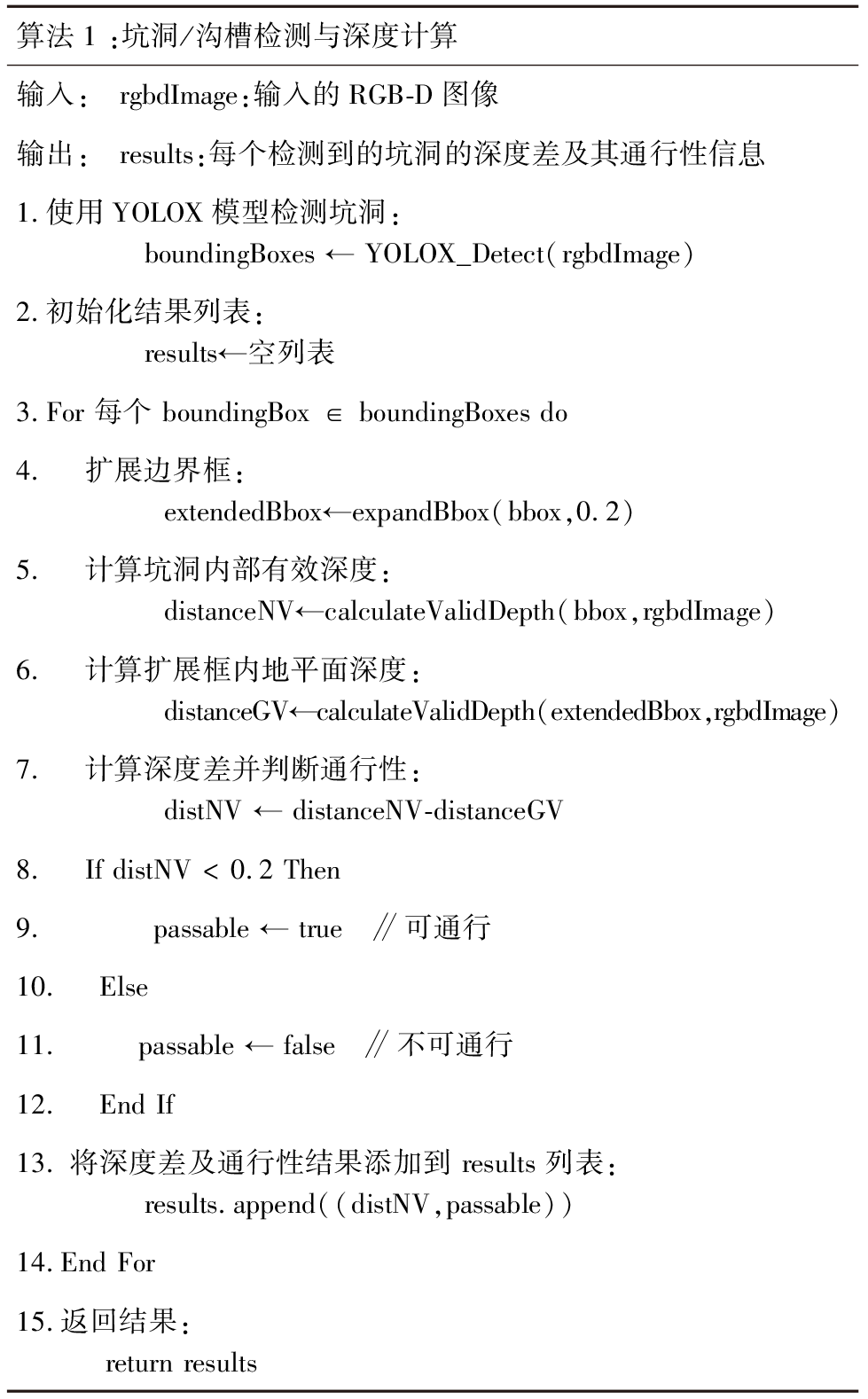
Fig.7 Algorithm 1:pothole and trench detection and depth calculation
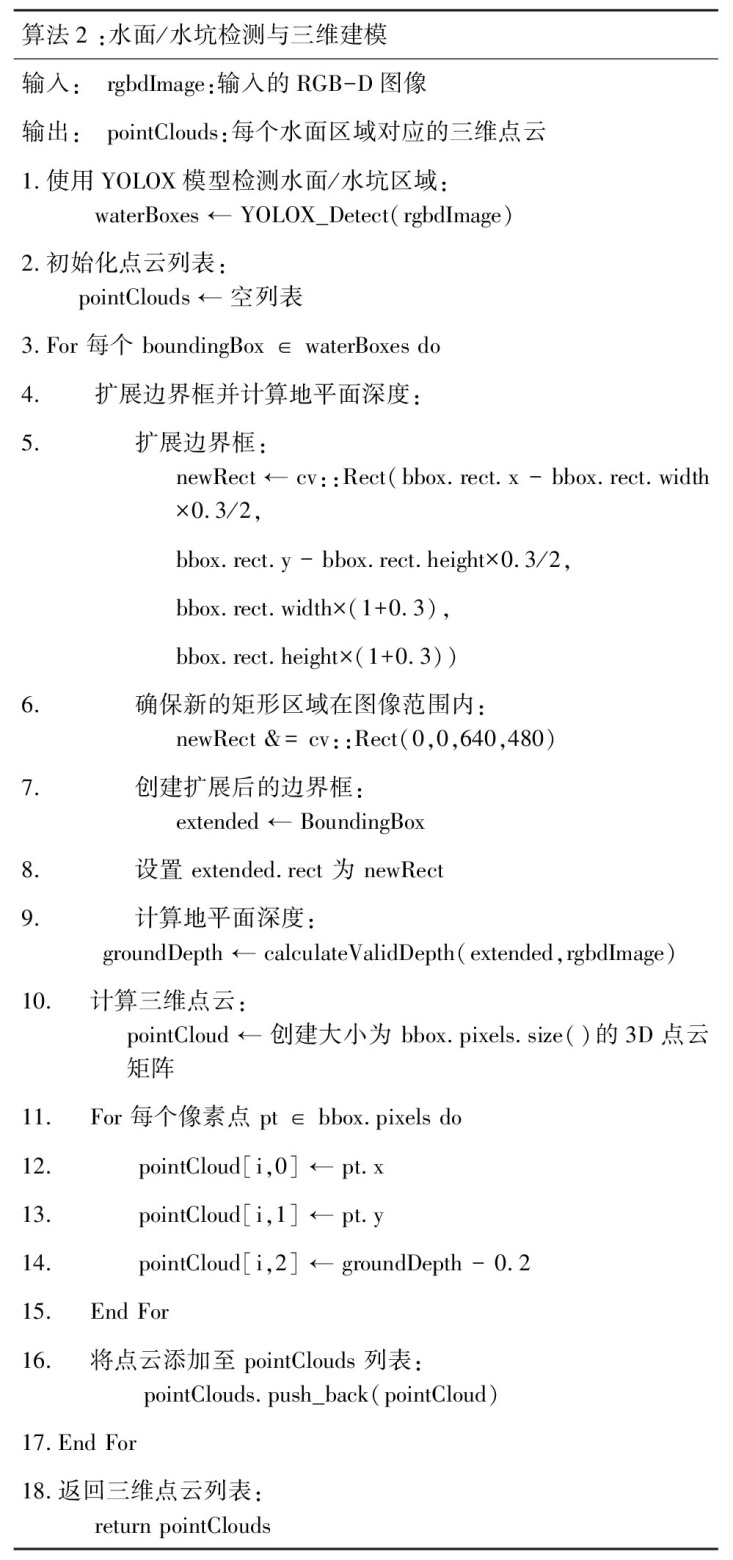
Fig.8 Algorithm 2:water surface and pothole detection and 3D modeling
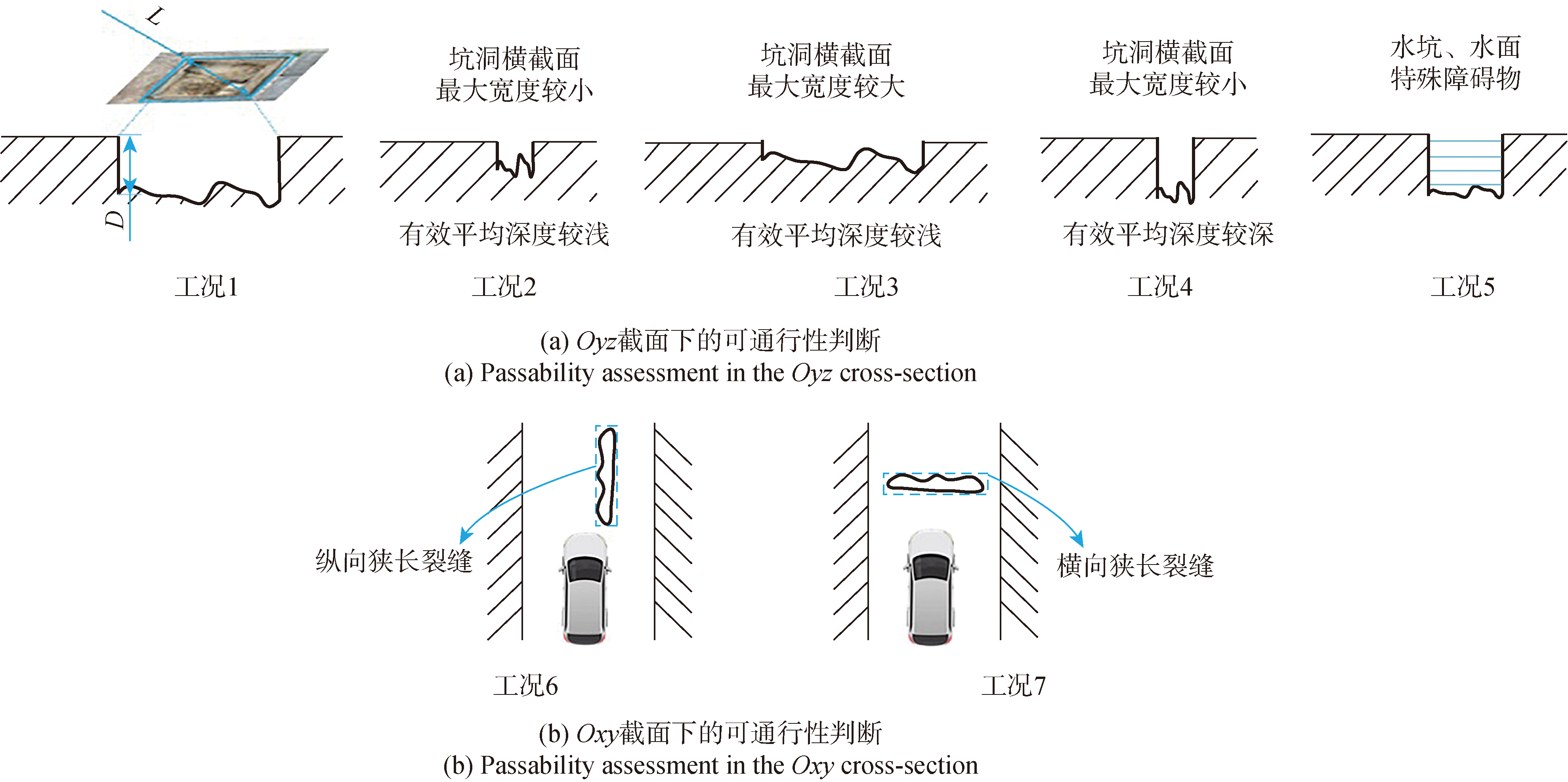
Fig.9 Condition analysis of UGV passability
| 硬件 | 类型 | 设备规格 |
|---|---|---|
| 智能装备1 | UAV | JETSON Xavier开发板;8核;32GB内存;RGB-D深度相机,IMU和GPS传感器 |
| 智能装备2 | 线控底盘车 | Nuvo-8108GC;Intel Core i9-9900K CPU;32GB |
Table 4 Hardware configuration
| 硬件 | 类型 | 设备规格 |
|---|---|---|
| 智能装备1 | UAV | JETSON Xavier开发板;8核;32GB内存;RGB-D深度相机,IMU和GPS传感器 |
| 智能装备2 | 线控底盘车 | Nuvo-8108GC;Intel Core i9-9900K CPU;32GB |
| 模型 | 训练损失 | CS-mAP | 模型 | 训练损失 | CS-mAP |
|---|---|---|---|---|---|
| YOLOv2 | | | YOLOv5 | | |
| YOLOv3 | | | YOLOv6 | | |
| YOLOv4 | | | YOLOv7 | | |
| YOLOv8 | | | YOLOv10 | | |
| YOLOv9 | | | YOLOX | | |
Table 5 Visualization of YOLO series model training process
| 模型 | 训练损失 | CS-mAP | 模型 | 训练损失 | CS-mAP |
|---|---|---|---|---|---|
| YOLOv2 | | | YOLOv5 | | |
| YOLOv3 | | | YOLOv6 | | |
| YOLOv4 | | | YOLOv7 | | |
| YOLOv8 | | | YOLOv10 | | |
| YOLOv9 | | | YOLOX | | |
| 网络模型 | 参数量/ 106 | 坑洞 CSP/% | 水面 CSP/% | 沟槽 CSP/% | CS-mAP/% | CEI |
|---|---|---|---|---|---|---|
| YOLOv2 | 23 | 81.02 | 83.24 | 77.45 | 80.57 | 24.25 |
| YOLOv3 | 240 | 85.95 | 89.13 | 84.26 | 86.44 | 28.49 |
| YOLOv4 | 195 | 84.33 | 89.39 | 81.62 | 85.11 | 26.81 |
| YOLOv5 | 27 | 88.29 | 87.82 | 83.35 | 86.48 | 27.31 |
| YOLOv6 | 80 | 85.66 | 92.46 | 86.15 | 87.09 | 27.33 |
| YOLOv7 | 145 | 97.61 | 93.05 | 90.92 | 93.86 | 30.26 |
| YOLOv8 | 173 | 97.64 | 93.15 | 90.38 | 93.16 | 30.26 |
| YOLOv9 | 122 | 98.27 | 94.23 | 91.12 | 95.11 | 31.08 |
| YOLOv10 | 211 | 99.11 | 96.16 | 93.27 | 96.27 | 31.97 |
| YOLOX | 67 | 89.93 | 90.19 | 89.86 | 89.99 | 27.22 |
Table 6 Comparison of object detection accuracies for special obstacle datasets
| 网络模型 | 参数量/ 106 | 坑洞 CSP/% | 水面 CSP/% | 沟槽 CSP/% | CS-mAP/% | CEI |
|---|---|---|---|---|---|---|
| YOLOv2 | 23 | 81.02 | 83.24 | 77.45 | 80.57 | 24.25 |
| YOLOv3 | 240 | 85.95 | 89.13 | 84.26 | 86.44 | 28.49 |
| YOLOv4 | 195 | 84.33 | 89.39 | 81.62 | 85.11 | 26.81 |
| YOLOv5 | 27 | 88.29 | 87.82 | 83.35 | 86.48 | 27.31 |
| YOLOv6 | 80 | 85.66 | 92.46 | 86.15 | 87.09 | 27.33 |
| YOLOv7 | 145 | 97.61 | 93.05 | 90.92 | 93.86 | 30.26 |
| YOLOv8 | 173 | 97.64 | 93.15 | 90.38 | 93.16 | 30.26 |
| YOLOv9 | 122 | 98.27 | 94.23 | 91.12 | 95.11 | 31.08 |
| YOLOv10 | 211 | 99.11 | 96.16 | 93.27 | 96.27 | 31.97 |
| YOLOX | 67 | 89.93 | 90.19 | 89.86 | 89.99 | 27.22 |
| 模型 | 序号 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |||||||
| YOLOv2 | | | | | | | ||||||
| YOLOv3 | | | | | | | ||||||
| YOLOv4 | | | | | | | ||||||
| YOLOv5 | | | | | | | ||||||
| YOLOv6 | | | | | | | ||||||
| YOLOv7 | | | | | | | ||||||
| YOLOv8 | | | | | | | ||||||
| YOLOv9 | | | | | | | ||||||
| YOLOv10 | | | | | | | ||||||
| YOLOX | | | | | | | ||||||
Table 7 Visualization of special obstacle detection
| 模型 | 序号 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |||||||
| YOLOv2 | | | | | | | ||||||
| YOLOv3 | | | | | | | ||||||
| YOLOv4 | | | | | | | ||||||
| YOLOv5 | | | | | | | ||||||
| YOLOv6 | | | | | | | ||||||
| YOLOv7 | | | | | | | ||||||
| YOLOv8 | | | | | | | ||||||
| YOLOv9 | | | | | | | ||||||
| YOLOv10 | | | | | | | ||||||
| YOLOX | | | | | | | ||||||

Fig.10 The interaction process among UAV and potholes and trenches

Fig.11 Interaction process between UAV and water surfaces/puddles
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
赵一兵, 郭烈, 李明丽, 等. 无人地面车辆野外水体障碍物识别[J]. 兵工学报, 2014, 35 (增刊1):62-67.
|
|
|
|
| [14] |
刘家银, 唐振民, 王安东, 等. 基于多激光雷达与组合特征的非结构化环境负障碍物检测[J]. 机器人, 2017, 39(05):638-651.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
阮顺领, 鄢盛钰, 顾清华, 等. 基于多特征融合的露天矿区道路负障碍检测[J]. 煤炭学报, 2024, 49(5):2561-2572.
|
|
|
|
| [18] |
|
| [19] |
付浩龙, 赵津, 席阿行, 等. 无人机视觉下基于改进OTSU的负障碍物检测[J]. 计算机应用与软件, 2020, 37(9):105-110.
|
|
|
|
| [20] |
|
| [21] |
金政北, 金贝贝, 宋晓辉, 等. 改进YOLOv10算法及其在路面坑洼检测中的应用[J/OL]. 计算机应用与软件, 2025(2025-03-11). http://kns.cnki.net/kcms/detail/31.1260.tp.20250307.0824.002.htm.
|
|
|
|
| [22] |
|
| [1] | ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene [J]. Acta Armamentarii, 2025, 46(6): 240443-. |
| [2] | MA Yuwei, WU Weichao, WANG Wei, NIU Ailin, GUO Zhiming, YANG Jianxin. Map Lightweight Processing and Staircase Area Classification Method for Indoor Navigation of Unmanned Ground Platforms [J]. Acta Armamentarii, 2025, 46(6): 240483-. |
| [3] | SU Jiahao, LIU Siyu, LU Chunlei, GUO Zhao, WANG Zhirui, YAN Tong, DANG Ruina, SU Bo. Design of a Discrete Series Elastic Actuated Spine for Quadruped Robots [J]. Acta Armamentarii, 2025, 46(4): 240350-. |
| [4] | ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction [J]. Acta Armamentarii, 2025, 46(3): 240217-. |
| [5] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [6] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Wheeled L-quadruped Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 2024, 45(12): 4272-4282. |
| [7] | LI Zhong, GUAN Xiaorong, LI Huibin, HE Long, LONG Yi. Research Status and Key Technology Analysis of Active Rigid Lower Limb Assisted Exoskeleton [J]. Acta Armamentarii, 2024, 45(S1): 262-270. |
| [8] | Li Huibin, MA He, LIU Pengfei, YANG Peiying, GUAN Xiaorong. Current Development and Prospects of Wearable Supernumerary Robotic Limbs for Military Applications [J]. Acta Armamentarii, 2024, 45(S1): 287-295. |
| [9] | DANG Wanying, ZHOU Lelai, LI Yibin, ZHANG Chen. Neural Network Planning Method for Optimal Off-road Configuration of Modular Robots [J]. Acta Armamentarii, 2024, 45(10): 3674-3685. |
| [10] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [11] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [12] | LIU Yali, LU Yanchi, XU Xiaolong, SONG Qiuzhi. A Review of the Evaluation Methods of Assisting Effectiveness of Exoskeleton Robot and Its Applications [J]. Acta Armamentarii, 2024, 45(8): 2497-2519. |
| [13] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [14] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [15] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||