
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 250046-.doi: 10.12382/bgxb.2025.0046
WANG Zeqing1,2, XU Haixiang1,2, YU Wenzhao1,2,*( ), DU Zhe1,2, WANG Hongmei2
), DU Zhe1,2, WANG Hongmei2
Received:2025-01-13
Online:2025-08-28
Contact:
YU Wenzhao
CLC Number:
WANG Zeqing, XU Haixiang, YU Wenzhao, DU Zhe, WANG Hongmei. Dual-Loop Prescribed-Time 3D Formation Control of Underactuated Multi-AUVs[J]. Acta Armamentarii, 2025, 46(8): 250046-.
Add to citation manager EndNote|Ris|BibTeX
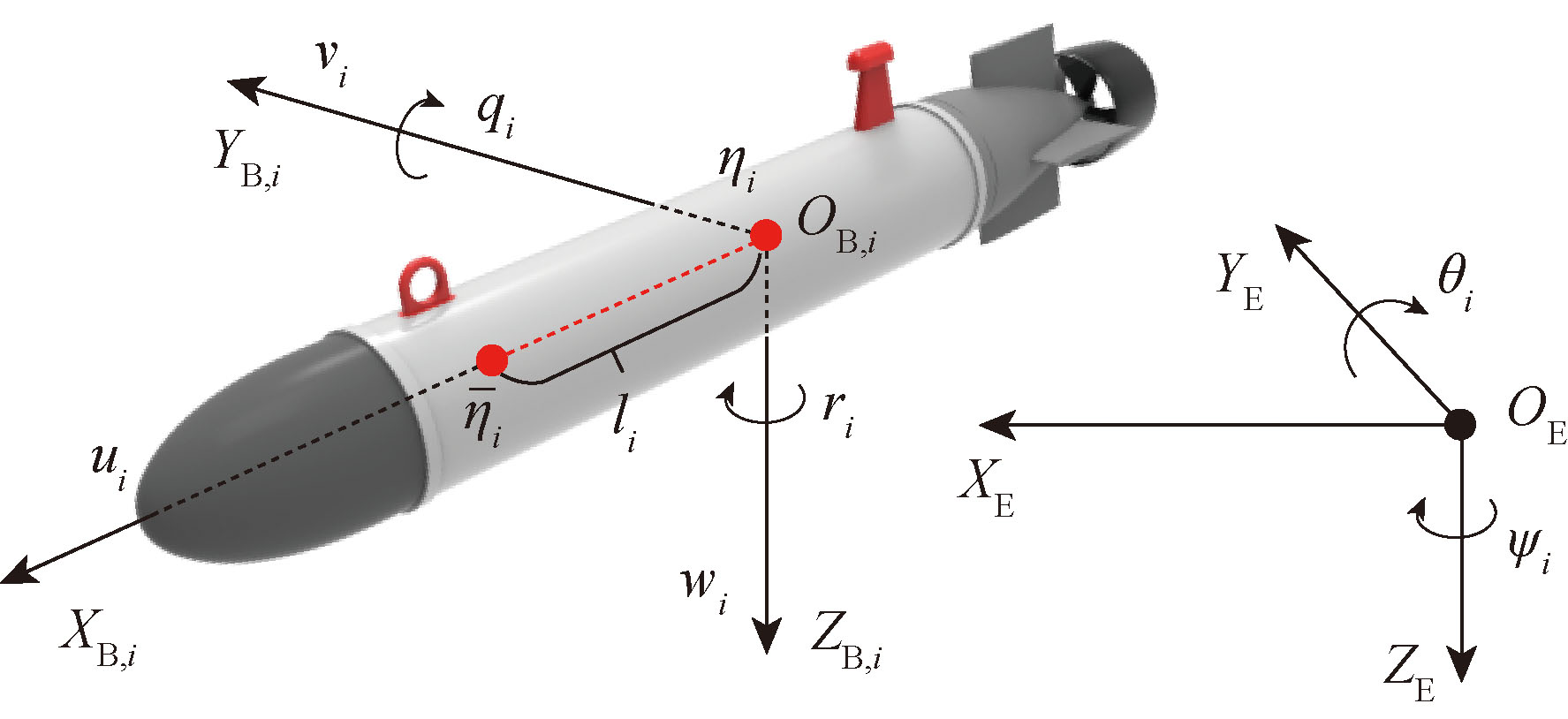
Fig.1 Earth-fixed coordinate system and body- fixed coordinate system
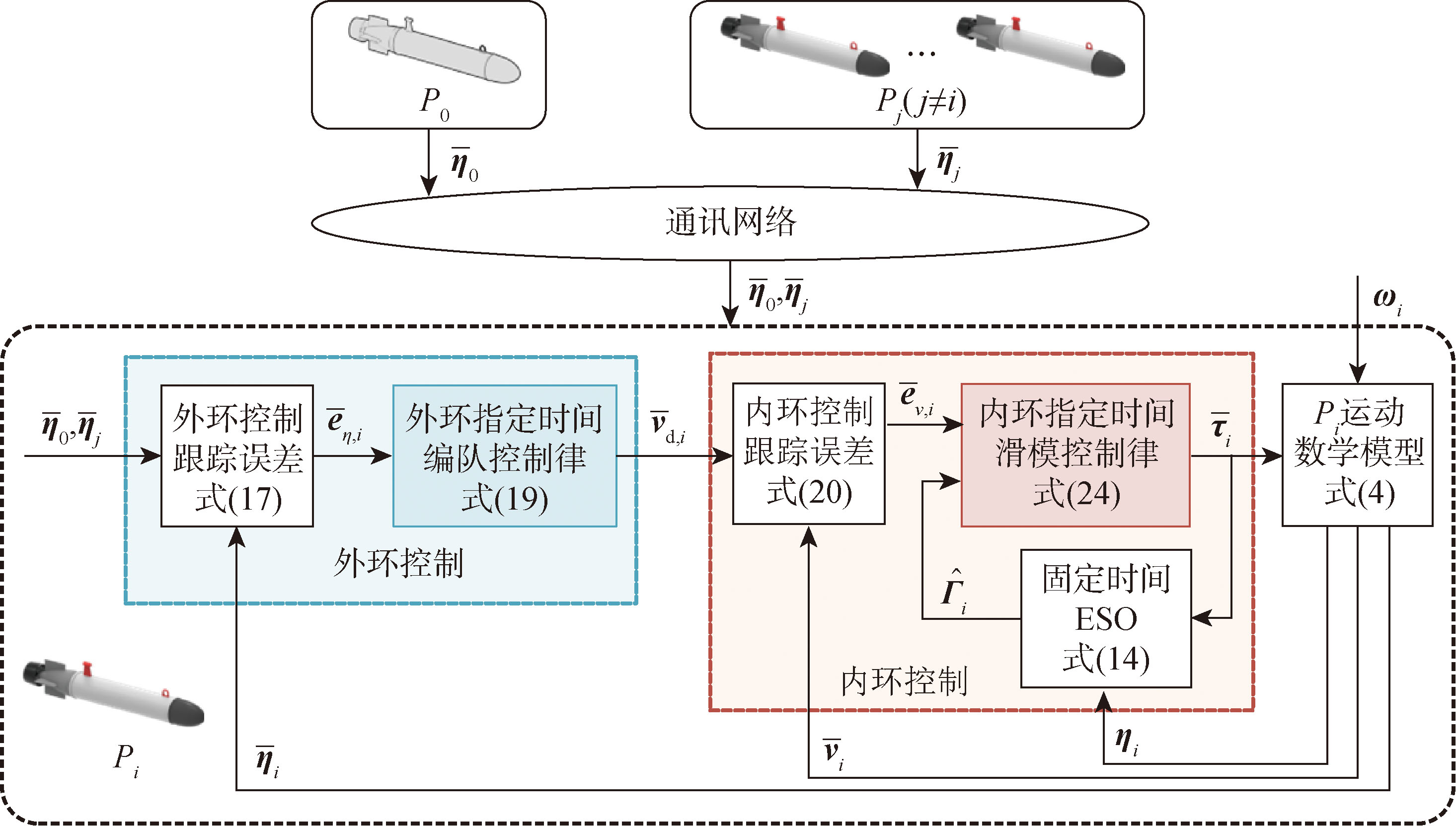
Fig.2 Schematic diagram of AUV dual-loop prescribed time formation control
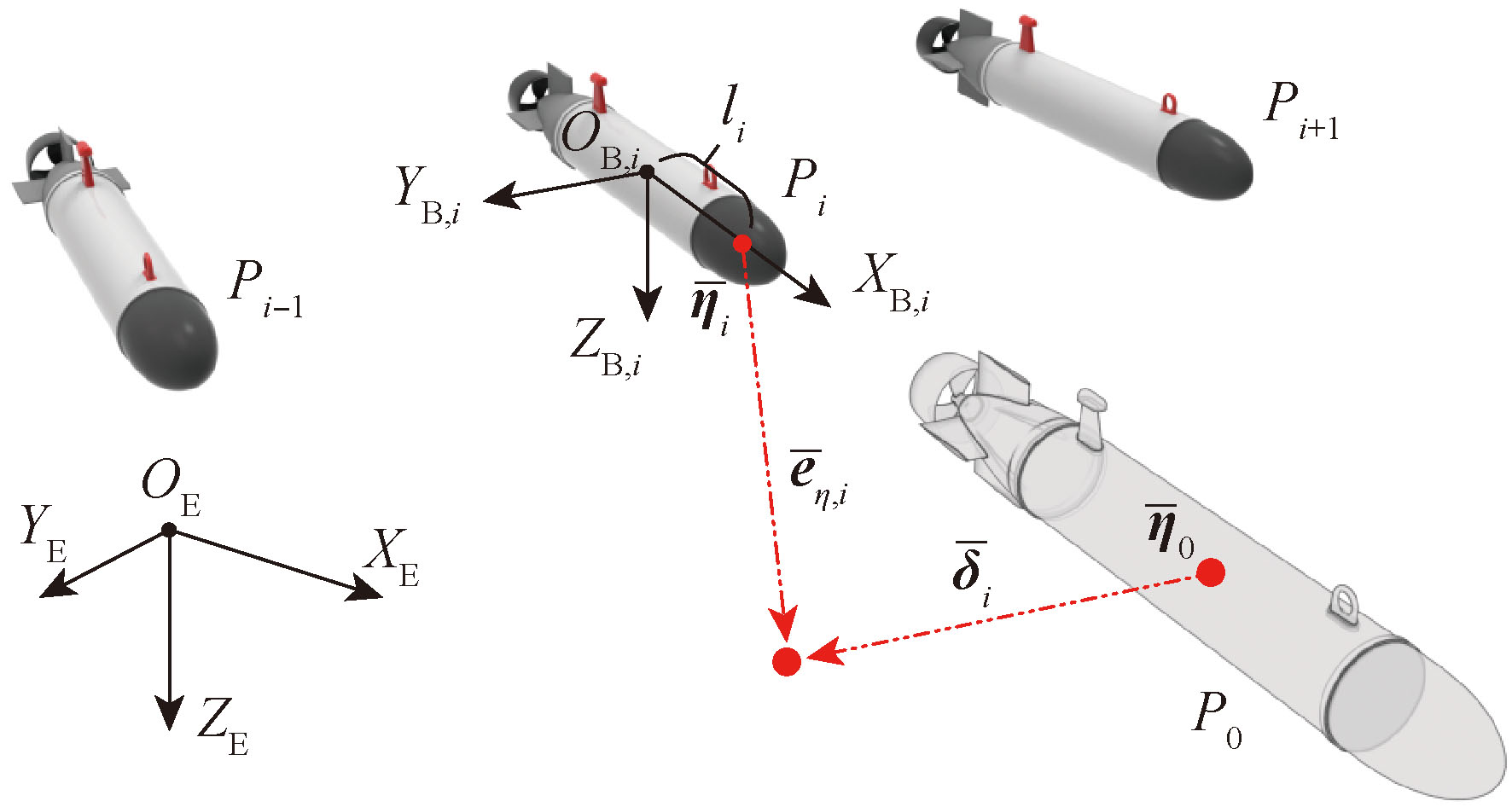
Fig.3 Multi-AUV 3D formation control system
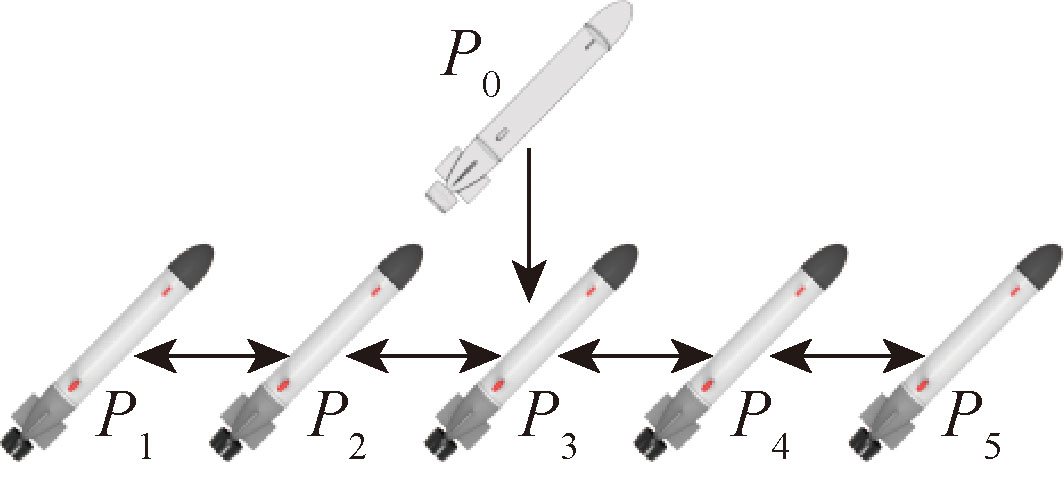
Fig.4 Communication topology of AUV formation
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| η1(0) | [-6m,-20m,3m,0°,0°]T | [0m,-20m,0m]T | |
| η2(0) | [-4m,-8m,-2m,0°,0°]T | [0m,-10m,0m]T | |
| η3(0) | [-6m,0m,3m,0°,0°]T | [0m,0m,0m]T | |
| η4(0) | [-4m,7m,-1m,0°,0°]T | [0m,10m,0m]T | |
| η5(0) | [-5m,19m,-2m,0°,0°]T | [0m,20m,0m]T | |
| υi(0) | [0m/s,0m/s,0m/s, 0°/s,0°/s]T | [0.4tm,0.1tm, 2sin(0.1t) m]T |
Table 1 Initial states and desired formation of AUV
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| η1(0) | [-6m,-20m,3m,0°,0°]T | [0m,-20m,0m]T | |
| η2(0) | [-4m,-8m,-2m,0°,0°]T | [0m,-10m,0m]T | |
| η3(0) | [-6m,0m,3m,0°,0°]T | [0m,0m,0m]T | |
| η4(0) | [-4m,7m,-1m,0°,0°]T | [0m,10m,0m]T | |
| η5(0) | [-5m,19m,-2m,0°,0°]T | [0m,20m,0m]T | |
| υi(0) | [0m/s,0m/s,0m/s, 0°/s,0°/s]T | [0.4tm,0.1tm, 2sin(0.1t) m]T |
| 控制环节 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|
| 外环控制律 | Kη | diag{0.4,0.4,0.4} | Tη | 20 |
| 内环控制律 | Kυ | diag{5,5,5} | Tυ | 20 |
| 固定时间 ESO | F1 | diag{5,5,5} | H1 | diag{6,6,6} |
| F2 | diag{6,6,6} | H2 | diag{10,10,10} | |
| F3 | diag{12,12,12} | H3 | diag{12,12,12} | |
| f | 0.9 | h | 1.11 |
Table 2 Controller parameters
| 控制环节 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|
| 外环控制律 | Kη | diag{0.4,0.4,0.4} | Tη | 20 |
| 内环控制律 | Kυ | diag{5,5,5} | Tυ | 20 |
| 固定时间 ESO | F1 | diag{5,5,5} | H1 | diag{6,6,6} |
| F2 | diag{6,6,6} | H2 | diag{10,10,10} | |
| F3 | diag{12,12,12} | H3 | diag{12,12,12} | |
| f | 0.9 | h | 1.11 |
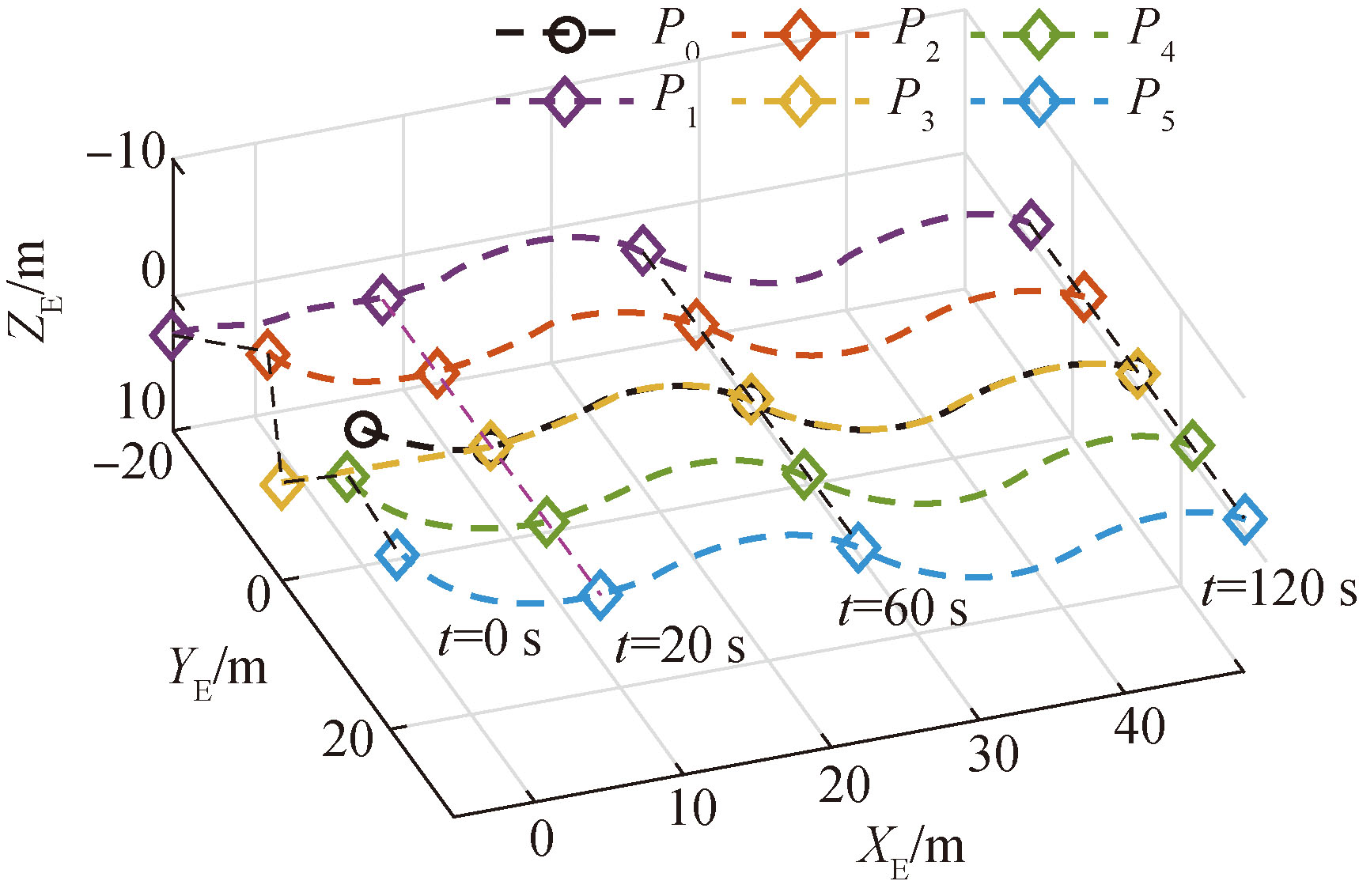
Fig.5 Motion trajectories of multi-AUV formation

Fig.6 Outer-loop control tracking errors

Fig.7 Inner-loop control tracking errors

Fig.8 Lumped disturbance estimation errors

Fig.9 Control forces
| 控制方法 | P1 | P2 | P3 | P4 | P5 |
|---|---|---|---|---|---|
| 指定时间控制 | 8.63 | 10.66 | 8.16 | 9.77 | 5.74 |
| 固定时间控制 | 16.57 | 17.54 | 16.49 | 15.99 | 8.42 |
| 有限时间控制 | 25.28 | 27.42 | 26.60 | 24.50 | 11.78 |
Table 3 Integral absolute formation error of each AUV
| 控制方法 | P1 | P2 | P3 | P4 | P5 |
|---|---|---|---|---|---|
| 指定时间控制 | 8.63 | 10.66 | 8.16 | 9.77 | 5.74 |
| 固定时间控制 | 16.57 | 17.54 | 16.49 | 15.99 | 8.42 |
| 有限时间控制 | 25.28 | 27.42 | 26.60 | 24.50 | 11.78 |
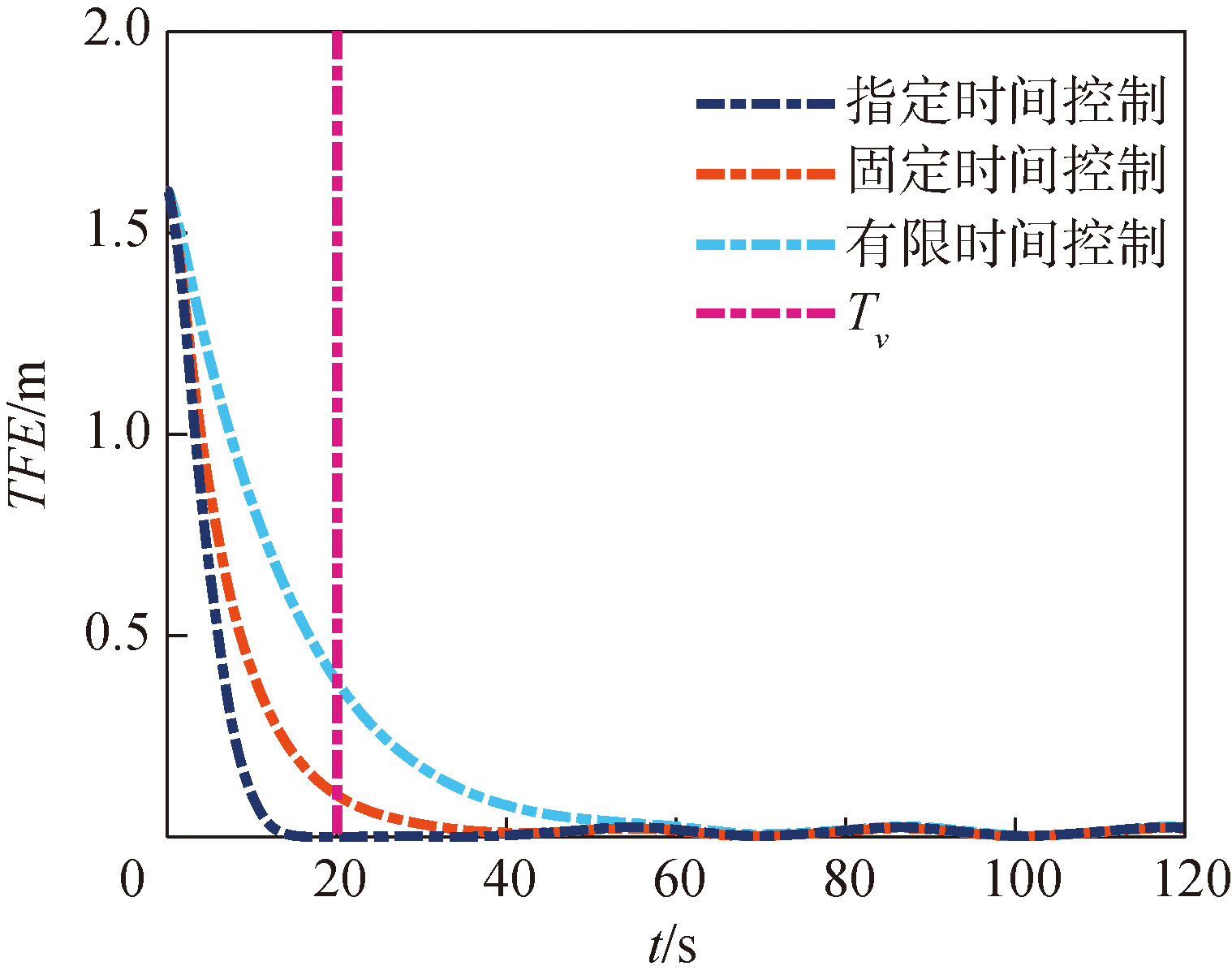
Fig.10 Total formation error of multi-AUV
| [1] |
黄琰, 李岩, 俞建成, 等. AUV智能化现状与发展趋势[J]. 机器人, 2020, 42(2):215-231.
doi: 10.13973/j.cnki.robot.190392 |
|
doi: 10.13973/j.cnki.robot.190392 |
|
| [2] |
智达. 国外海军无人潜航器发展综述[J]. 船舶工程, 2022, 44(8):170-172.
|
|
|
|
| [3] |
王童豪, 彭星光, 胡浩, 等. 海上有人/无人协同系统及其关键技术综述[J]. 兵工学报, 2024, 45(10):3317-3340.
doi: 10.12382/bgxb.2024.0327 |
|
|
|
| [4] |
张鑫明, 韩明磊, 余益锐, 等. 潜艇与UUV协同作战发展现状及关键技术[J]. 水下无人系统学报, 2021, 29(5):497-508.
|
|
|
|
| [5] |
崔云菲. 多无人水下航行器自抗扰编队包含控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2024:3-4.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
王静耀, 杜佳璐. 欠驱动AUV分布式事件触发固定时间三维编队控制[J]. 控制与决策, 2025, 40(1):231-241.
|
|
|
|
| [14] |
|
| [15] |
黄秀颖, 刘海涛, 田雪虹. 基于输入饱和的欠驱动水面舰艇预定义时间跟踪控制[J]. 中国舰船研究, 2024, 19(1):98-110.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | YUAN Shusen, HU Zhe, YI Wenjun, DENG Wenxiang, YAO Jianyong, YANG Guolai, GUAN Jun, WANG Yimin. Active Disturbance Adaptive Composite Control of Stabilization System for Unmanned Vehicle-mounted Gun during Moving [J]. Acta Armamentarii, 2025, 46(9): 240888-. |
| [2] | WANG Zhuoyao, LI Chuanjun, MA Jingquan, YU Jiaqi. Real-time Coordinated Trajectory Planning Method of Unpowered Gliding Vehicle Clusters [J]. Acta Armamentarii, 2025, 46(8): 240827-. |
| [3] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [4] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [5] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [6] | WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction [J]. Acta Armamentarii, 2025, 46(4): 240410-. |
| [7] | XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot [J]. Acta Armamentarii, 2025, 46(2): 240183-. |
| [8] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [9] | ZHOU Guohua, LI Linfeng, WU Kena, LIU Yuelin, XIA Shuai. Numerical Simulation of Magnetic Interference Parameter Identification of AUV Based on L-SHADE Agorithm [J]. Acta Armamentarii, 2024, 45(8): 2678-2687. |
| [10] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [11] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [12] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [13] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [14] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [15] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||