
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240788-.doi: 10.12382/bgxb.2024.0788
• Special Topics of Academic Papers at the 27th Annual Meeting of the China Association for Science and technology • Previous Articles Next Articles
FENG Yu, XIE Guangda*( ), LIU Long, SU Yunquan, LIU Junwei, GENG Yandong, MIAO Lie
), LIU Long, SU Yunquan, LIU Junwei, GENG Yandong, MIAO Lie
Received:2024-09-03
Online:2025-06-28
Contact:
XIE Guangda
CLC Number:
FENG Yu, XIE Guangda, LIU Long, SU Yunquan, LIU Junwei, GENG Yandong, MIAO Lie. LiDAR Object Detection Method Based on Point Cloud Mask Pre-training and Gaussian Localization Uncertainty Estimation[J]. Acta Armamentarii, 2025, 46(6): 240788-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Point cloud labels with errors
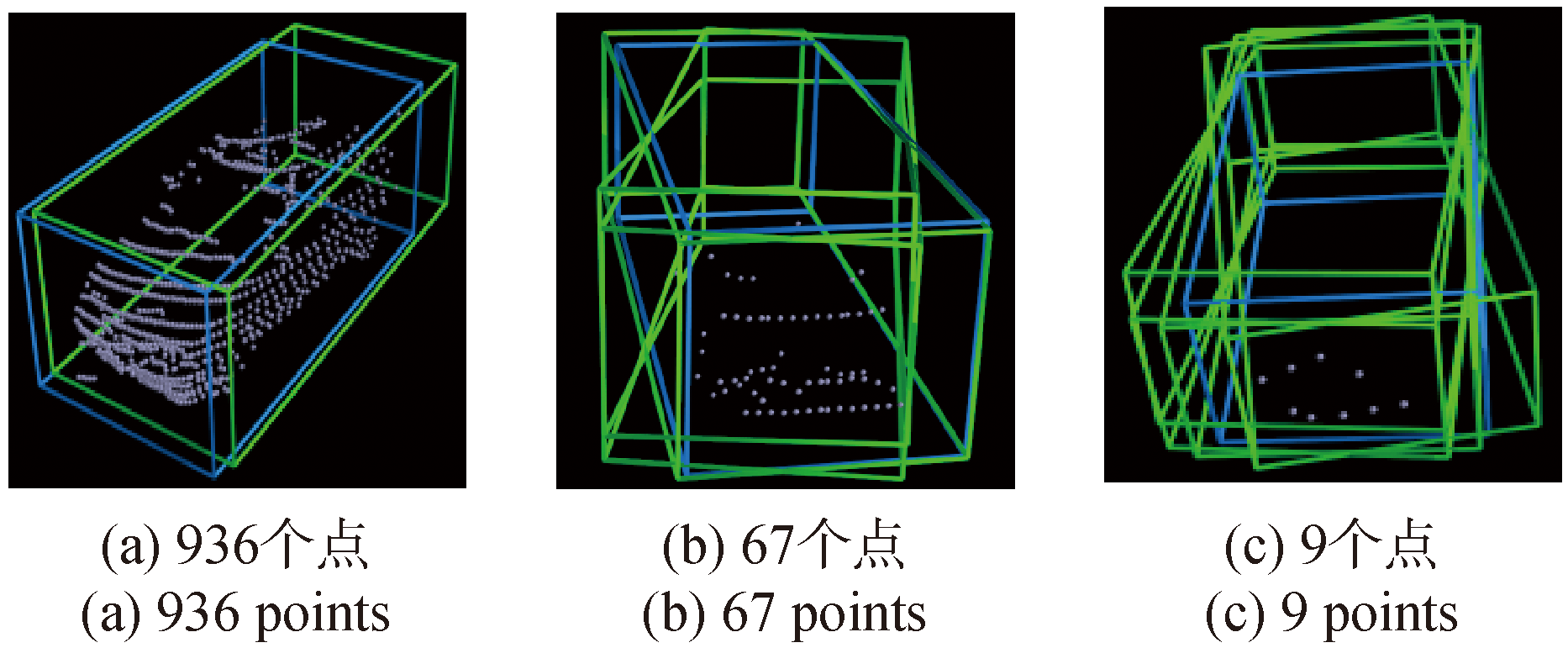
Fig.2 Point cloud labels with uncertainty

Fig.3 Algorithm architecture
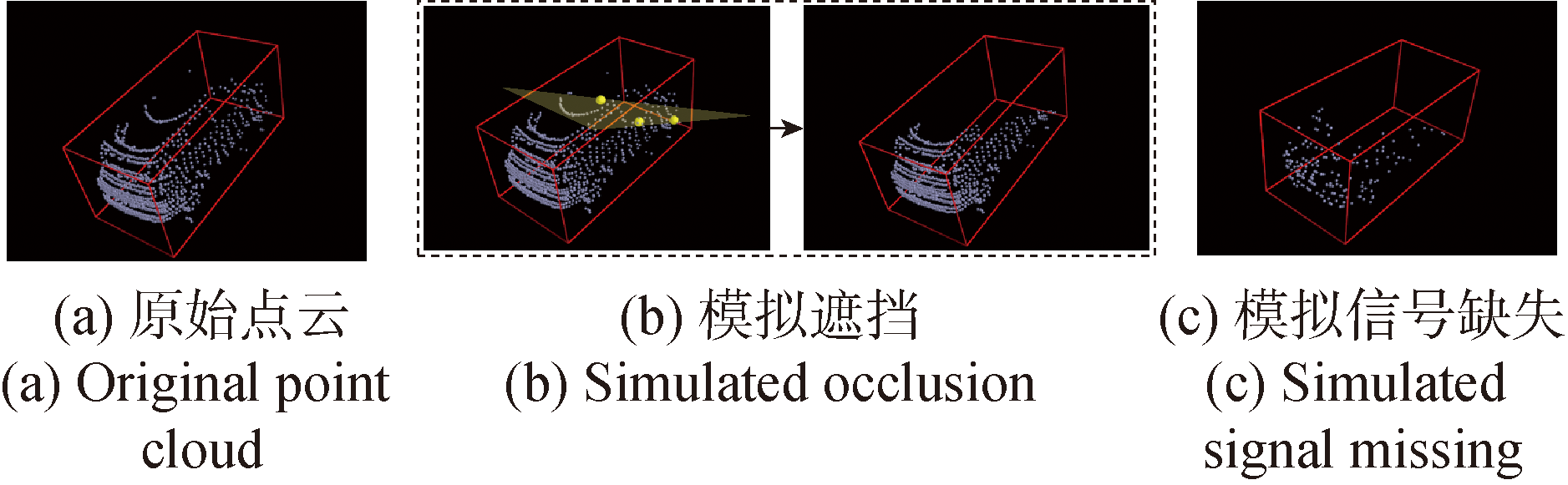
Fig.4 Point cloud masking process
| 类别 | 示例 | |||||
|---|---|---|---|---|---|---|
| 汽车 | | | | | | |
| 骑自行 车的人 | | | | | | |
| 行人 | | | | | | |
| 背景 | | | | | | |
Table 1 Pre-training dataset
| 类别 | 示例 | |||||
|---|---|---|---|---|---|---|
| 汽车 | | | | | | |
| 骑自行 车的人 | | | | | | |
| 行人 | | | | | | |
| 背景 | | | | | | |
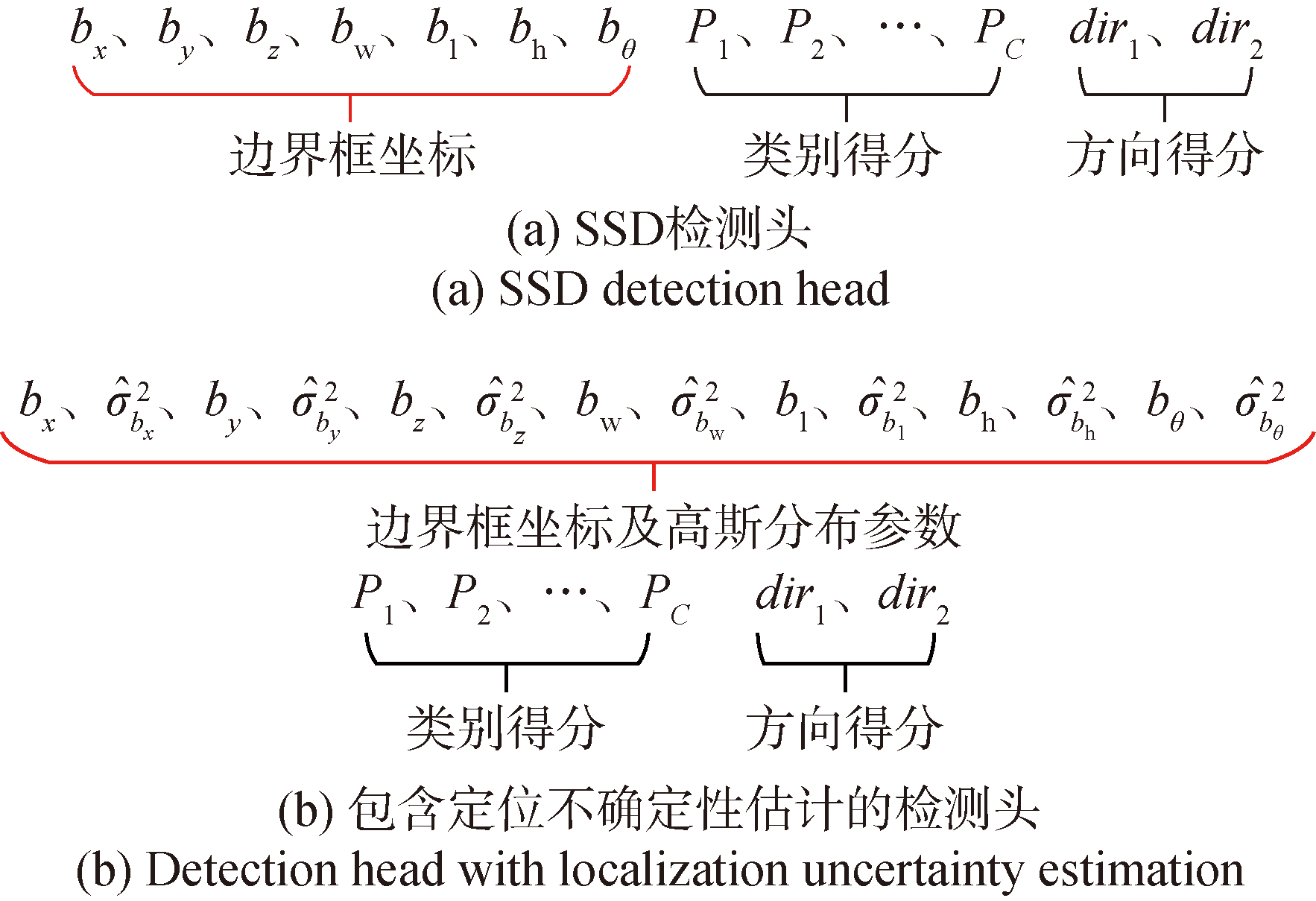
Fig.5 SSD detection head and detection head with localization uncertainty estimation
| 方法 | Car Apr40 | Ped Apr40 | Cyc-Apr40 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 容易 | 中等 | 困难 | 容易 | 中等 | 困难 | 容易 | 中等 | 困难 | |
| SECOND | 91.0 | 79.9 | 77.1 | 58.0 | 51.9 | 47.1 | 78.5 | 56.7 | 52.8 |
| SE+Pr | 91.1 | 80.5 | 78.8 | 59.9 | 55.4 | 50.2 | 79.7 | 59.5 | 55.8 |
| 提升 | 0.1 | 0.6 | 1.7 | 1.9 | 3.5 | 3.1 | 1.2 | 2.8 | 2.9 |
Table 2 Comparison of pre-training performances based on masking
| 方法 | Car Apr40 | Ped Apr40 | Cyc-Apr40 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 容易 | 中等 | 困难 | 容易 | 中等 | 困难 | 容易 | 中等 | 困难 | |
| SECOND | 91.0 | 79.9 | 77.1 | 58.0 | 51.9 | 47.1 | 78.5 | 56.7 | 52.8 |
| SE+Pr | 91.1 | 80.5 | 78.8 | 59.9 | 55.4 | 50.2 | 79.7 | 59.5 | 55.8 |
| 提升 | 0.1 | 0.6 | 1.7 | 1.9 | 3.5 | 3.1 | 1.2 | 2.8 | 2.9 |
| 方法及 提升值 | mAP (<15m) | mAP (15~30m) | mAP (>30m) | mAP | NDS |
|---|---|---|---|---|---|
| SECOND | 69.9 | 53.6 | 25.4 | 52.8 | 63.3 |
| SE+Ga | 71.6 | 56.5 | 29.0 | 55.5 | 67.4 |
| 提升值 | 1.7 | 2.9 | 3.6 | 2.7 | 3.1 |
Table 3 Comparison of detection heads with localization uncertainty estimation
| 方法及 提升值 | mAP (<15m) | mAP (15~30m) | mAP (>30m) | mAP | NDS |
|---|---|---|---|---|---|
| SECOND | 69.9 | 53.6 | 25.4 | 52.8 | 63.3 |
| SE+Ga | 71.6 | 56.5 | 29.0 | 55.5 | 67.4 |
| 提升值 | 1.7 | 2.9 | 3.6 | 2.7 | 3.1 |
| 方法 | AP LEVEL 1 | AP LEVEL 2 | mAP | 延迟 /ms | ||||
|---|---|---|---|---|---|---|---|---|
| Vec | Ped | Cyc | Vec | Ped | Cyc | |||
| Focals Conv | 72.2 | 72.6 | 71.1 | 64.1 | 64.6 | 68.5 | 68.9 | 174.6 |
| CenterPoint | 70.9 | 71.5 | 69.1 | 62.8 | 63.5 | 66.5 | 67.3 | 88.4 |
| CE+Pr | 71.5 | 73.0 | 70.5 | 63.5 | 64.8 | 68.2 | 68.5 | 88.4 |
| CE+Pr+Ga | 72.8 | 72.3 | 70.7 | 65.8 | 64.2 | 68.8 | 69.1 | 92.0 |
| SECOND | 71.0 | 65.2 | 57.1 | 62.6 | 57.2 | 55.0 | 61.4 | 74.3 |
| SE+Pr | 70.8 | 67.9 | 60.7 | 63.1 | 59.0 | 57.4 | 63.1 | 74.3 |
| SE+Pr+Ga | 72.4 | 70.4 | 62.2 | 64.9 | 58.9 | 60.7 | 64.9 | 76.4 |
Table 4 Comparison of comprehensive performances
| 方法 | AP LEVEL 1 | AP LEVEL 2 | mAP | 延迟 /ms | ||||
|---|---|---|---|---|---|---|---|---|
| Vec | Ped | Cyc | Vec | Ped | Cyc | |||
| Focals Conv | 72.2 | 72.6 | 71.1 | 64.1 | 64.6 | 68.5 | 68.9 | 174.6 |
| CenterPoint | 70.9 | 71.5 | 69.1 | 62.8 | 63.5 | 66.5 | 67.3 | 88.4 |
| CE+Pr | 71.5 | 73.0 | 70.5 | 63.5 | 64.8 | 68.2 | 68.5 | 88.4 |
| CE+Pr+Ga | 72.8 | 72.3 | 70.7 | 65.8 | 64.2 | 68.8 | 69.1 | 92.0 |
| SECOND | 71.0 | 65.2 | 57.1 | 62.6 | 57.2 | 55.0 | 61.4 | 74.3 |
| SE+Pr | 70.8 | 67.9 | 60.7 | 63.1 | 59.0 | 57.4 | 63.1 | 74.3 |
| SE+Pr+Ga | 72.4 | 70.4 | 62.2 | 64.9 | 58.9 | 60.7 | 64.9 | 76.4 |
| 帧 序 | Ground Truth | Baseline | Baseline +Pr | Baseline +Pr+Ga |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
| 5 | | | | |
| 6 | | | | |
Table 5 Comparison of detection results
| 帧 序 | Ground Truth | Baseline | Baseline +Pr | Baseline +Pr+Ga |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
| 5 | | | | |
| 6 | | | | |
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
汪萌, 诸兵. 不确定性建模在2D和3D目标检测中的应用[J]. 系统工程与电子技术, 2023, 45(8) :2370-2376.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
谢兄, 杨金鹏. YOLO-wLU:考虑定位不确定性的目标检测算法[J]. 计算机工程与应用, 2021, 57(22):223-231.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [1] |
龚诗雄, 王旭, 孔国杰, 等. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10):2429-2442.
|
|
|
|
| [2] |
刘桂宇. 面向激光雷达点云的三维目标识别算法研究综述[J]. 信息记录材料, 2022, 23(4):243-245.
|
|
|
|
| [3] |
霍威乐, 荆涛, 任爽. 面向自动驾驶的三维目标检测综述[J]. 计算机科学, 2023, 50(7):107-118.
|
| [1] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [2] | ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction [J]. Acta Armamentarii, 2025, 46(3): 240217-. |
| [3] | ZHAO Chunbo, MO Bo, LI Dawei, ZHAO Jie. Research on Motion Blur Object Detection Technology for Imaging Guidance [J]. Acta Armamentarii, 2025, 46(2): 240376-. |
| [4] | WANG Yeru, YANG Geng, LIU Shu, XU Xiao, CHEN Huajie, QIN Feiwei, XU Huajie. GCN-based Detection of Occluded Key Parts of Vehicle Target [J]. Acta Armamentarii, 2024, 45(S1): 242-251. |
| [5] | XIONG Guangming, LUO Zhen, SUN Dong, TAO Junfeng, TANG Zeyue, WU Chao. Object Detection and Tracking for Unmanned Vehicles Based on Fusion of Infrared Camera and MMW Radar in Smoke-obscured Environment [J]. Acta Armamentarii, 2024, 45(3): 893-906. |
| [6] | LIU Bin, LI Xuemei. A Self-adaptive Dual Radius Filtering Algorithm Based on LiDAR Point Cloud [J]. Acta Armamentarii, 2023, 44(9): 2768-2777. |
| [7] | QIN Haolin, XU Tingfa, LI Jianan. Semi-supervised Hyperspectral Salient Object Detection Using Superpixel Attention and Siamese Structure [J]. Acta Armamentarii, 2023, 44(9): 2639-2649. |
| [8] | HUO Jian, CHEN Huimin, MA Yunfei, GUO Pengyu, YANG Xu, MENG Xiangsheng. Vehicle Target Recognition Algorithm Based on MEMS LiDAR [J]. Acta Armamentarii, 2023, 44(4): 940-948. |
| [9] | GUO Yonghong, NIU Haitao, SHI Chao, GUO Cheng. Few-shot Object Detection Based on Convolution Network and Attention Mechanism [J]. Acta Armamentarii, 2023, 44(11): 3508-3515. |
| [10] | GONG Shixiong, WANG Xu, KONG Guojie, GONG Jianwei. Methods for Multi-Vehicle Cooperative Object Tracking [J]. Acta Armamentarii, 2022, 43(10): 2429-2442. |
| [11] | LIU Zhongze, CHEN Huiyan, CUI Xing, XIONG Guangming, WANG Yuchun, TAO Yi. Real-time LiDAR SLAM in Off-road Environment for UGV [J]. Acta Armamentarii, 2019, 40(12): 2399-2406. |
| [12] | WU Qing-qing, XU Ting-fa, YAN Hui, XU Lei, WU Wei, LI Xiang-min. An Improved Color Separation Method for Object Detection in Complex Background [J]. Acta Armamentarii, 2013, 34(4): 501-506. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||