
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (4): 940-948.doi: 10.12382/bgxb.2021.0822
Previous Articles Next Articles
HUO Jian1, CHEN Huimin1,*( ), MA Yunfei1, GUO Pengyu1, YANG Xu1, MENG Xiangsheng2
), MA Yunfei1, GUO Pengyu1, YANG Xu1, MENG Xiangsheng2
Received:2021-12-03
Online:2023-04-28
Contact:
CHEN Huimin
HUO Jian, CHEN Huimin, MA Yunfei, GUO Pengyu, YANG Xu, MENG Xiangsheng. Vehicle Target Recognition Algorithm Based on MEMS LiDAR[J]. Acta Armamentarii, 2023, 44(4): 940-948.
Add to citation manager EndNote|Ris|BibTeX
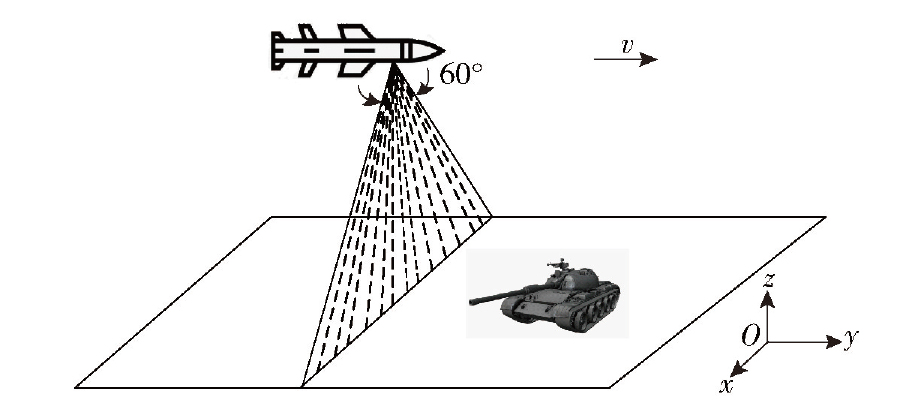
Fig.1 Schematic diagram of missile borne MEMS LiDAR
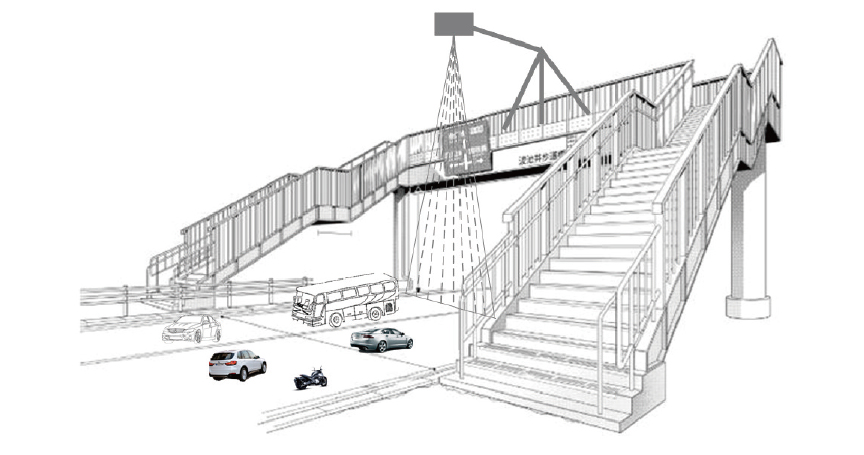
Fig.2 Equivalent experimental scene
| 参数 | 数值 |
|---|---|
| 波长/nm | 905 |
| 最大探测距离/m | 75 |
| 测距精度/cm | 2 |
| 视场角/(°) | 60 |
| 角分辨率/(°) | 0.2 |
| 帧频/Hz | 360 |
Table 1 Parameters of one-dimensional MEMS LiDAR
| 参数 | 数值 |
|---|---|
| 波长/nm | 905 |
| 最大探测距离/m | 75 |
| 测距精度/cm | 2 |
| 视场角/(°) | 60 |
| 角分辨率/(°) | 0.2 |
| 帧频/Hz | 360 |

Fig.3 Comparison between MEMS LiDAR point cloud and linear array LiDAR point cloud

Fig.4 Comparison of point cloud images before and after directly filtering

Fig.5 Comparison before and after ground points segmentation

Fig.6 Comparison of matrix formats of unorganized point cloud and organized point cloud
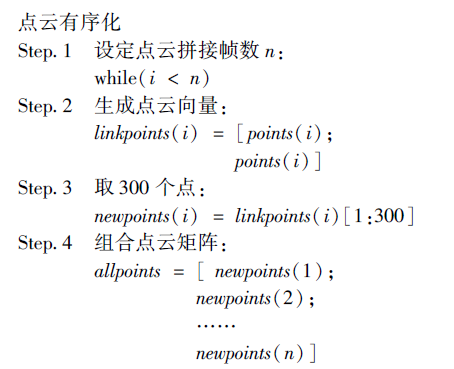
Fig.7 Organized processing of point cloud
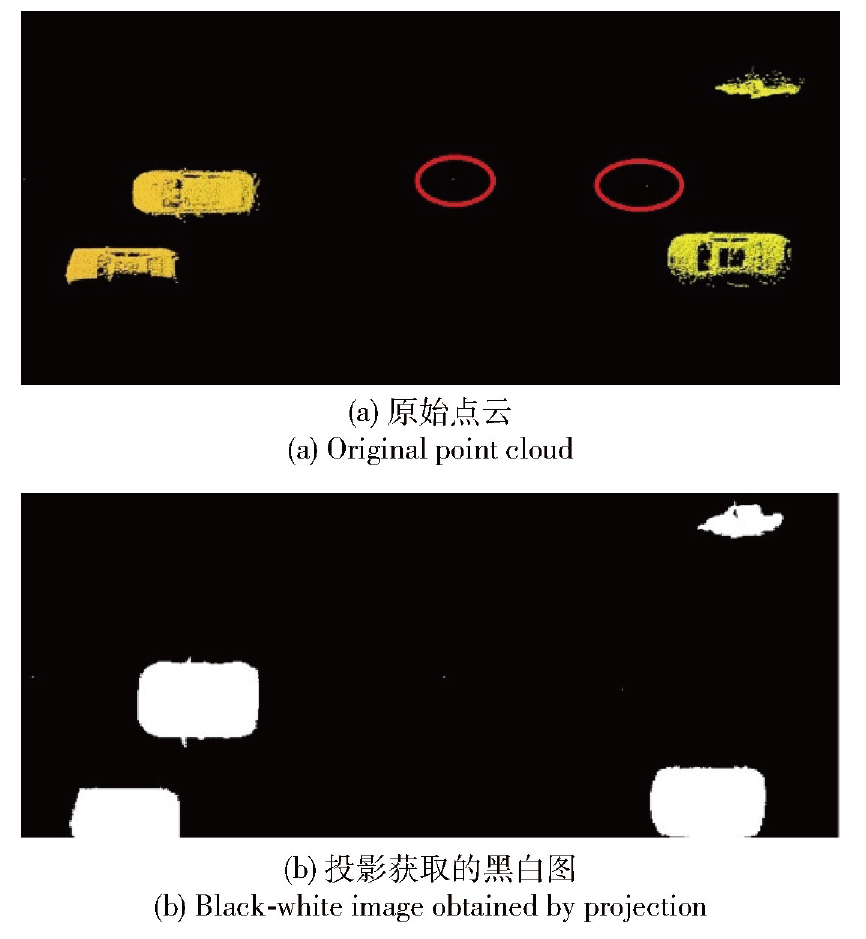
Fig.8 Comparison between original point cloud and black-white image

Fig.9 Position diagram of point cloud cluster after morphological operations
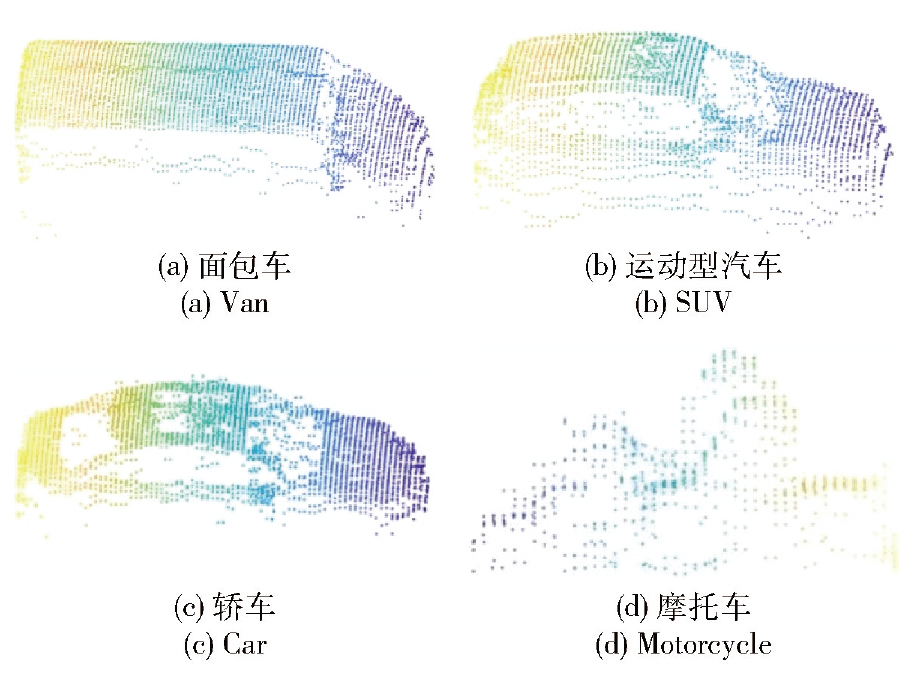
Fig.10 Independent point cloud extracted after clustering operations
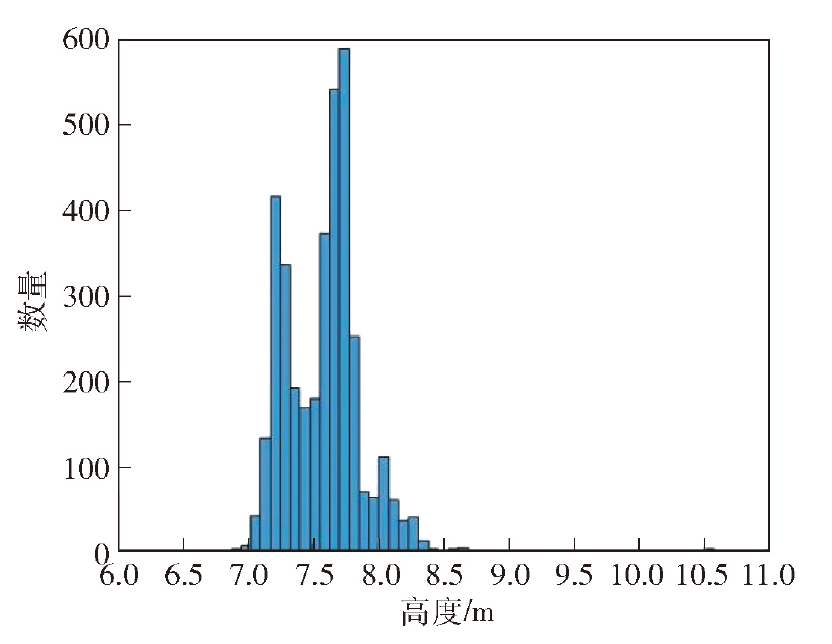
Fig.11 Distribution histogram of point cloud targets
| 编号 | 特征名称 | 维数 |
|---|---|---|
| 1 | 点云数量 | 1 |
| 2 | 点云外框尺寸 | 3 |
| 3 | 点云归一化坐标中心 | 3 |
| 4 | 点云空间离散值 | 6 |
| 5 | 点云三维协方差矩阵 | 9 |
| 6 | 点云三维协方差矩阵特征值 | 3 |
Table 2 Point cloud feature parameters
| 编号 | 特征名称 | 维数 |
|---|---|---|
| 1 | 点云数量 | 1 |
| 2 | 点云外框尺寸 | 3 |
| 3 | 点云归一化坐标中心 | 3 |
| 4 | 点云空间离散值 | 6 |
| 5 | 点云三维协方差矩阵 | 9 |
| 6 | 点云三维协方差矩阵特征值 | 3 |

Fig.12 Effect drawing of target recognition
| 车辆数量及 误判数量 | 种类 | |||
|---|---|---|---|---|
| 私家车 | 公交车 | 摩托车 | 厢式车 | |
| 数量 | 542 | 11 | 43 | 30 |
| 误判数量 | 26 | 0 | 2 | 4 |
Table 3 Number of vehicles collected in the experiment
| 车辆数量及 误判数量 | 种类 | |||
|---|---|---|---|---|
| 私家车 | 公交车 | 摩托车 | 厢式车 | |
| 数量 | 542 | 11 | 43 | 30 |
| 误判数量 | 26 | 0 | 2 | 4 |
| [1] |
于加其, 杨树兴, 朱伯立. 弹载激光成像雷达距离像的目标提取技术[J]. 北京理工大学学报, 2016, 36(12):1279-1282.
|
|
|
|
| [2] |
徐国艳, 牛欢, 郭宸阳, 等. 基于三维激光点云的目标识别与跟踪研究[J]. 汽车工程, 2020, 42(1): 38-46.
|
|
|
|
| [3] |
武军安, 郭锐, 刘荣忠, 等. 末敏弹线阵激光雷达对地面装甲目标的提取方法[J]. 红外与激光工程, 2019, 48(3): 140-147.
|
|
|
|
| [4] |
党吉圣, 杨军. 多特征融合的三维模型识别与分割[J]. 西安电子科技大学学报, 2020, 47(4): 149-157.
|
|
|
|
| [5] |
冯发杰, 丁亚洲, 吏军平, 等. 使用显著性划分的机载激光雷达点云滤波[J]. 红外与激光工程, 2020, 49(8): 26-34.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
蒋罕寒, 郭锐, 武军安, 等. 高旋掠飞弹载激光雷达稀疏点云插值算法[J]. 弹箭与制导学报, 2021, 41(1): 120-123.
|
|
|
|
| [9] |
刘亚文, 张颖, 陈泉. 结合全景影像的车载街景点云数据增强方法[J]. 武汉大学学报(信息科学版), 2020, 45(7): 1015-1020.
|
|
|
|
| [10] |
张雨禾, 耿国华, 魏潇然, 等. 采用密度空间聚类的散乱点云特征提取方法[J]. 西安电子科技大学学报, 2017, 44(2): 114-120.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
陆军, 华博文, 朱波. 基于局部曲面特征直方图的点云识别[J]. 模式识别与人工智能, 2020, 33(10): 934-943.
doi: 10.16451/j.cnki.issn1003-6059.202010008 |
|
doi: 10.16451/j.cnki.issn1003-6059.202010008 |
|
| [14] |
邹子强, 刘星, 张雪峰. 弹载线阵扫描激光雷达的目标识别算法[J]. 探测与控制学报, 2019, 41(1): 43-47.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
郑壮壮, 曹万科, 邹渊, 等. 动态环境下无人地面车辆点云地图快速重定位方法[J]. 兵工学报, 2020, 41(8):1581-1589.
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
| [19] |
|
| [20] |
|
| [21] |
马振宇, 庞勇, 李增元, 等. 地基激光雷达森林近地面点云精细分类与倒木提取[J]. 遥感学报, 2019, 23(4):743-755.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1109/ACCESS.2021.3094307 URL |
| [1] | PAN Zuodong, ZHOU Yue , GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [2] | YUAN Yi, GAI Jiangtao, ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun. Analysis and Experimental Verification of Yaw Motion Response Characteristics of High-speed Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1094-1107. |
| [3] | WANG Erlie, WANG Shuai, PI Dawei, WANG Hongliang, WANG Xianhui, XIE Boyuan. Energy Consumption Modeling for a Heavy-duty Purely Electric-powered Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1229-1236. |
| [4] | SONG Xiaoru, LIU Kang, GAO Song, CHEN Chaobo, YAN Kun. Research on Improved YOLOv5-based Military Target Recognition Algorithm Used in Complex Battlefield Environment [J]. Acta Armamentarii, 2024, 45(3): 934-947. |
| [5] | ZHANG Liang, HU Changli, WU Xiao’an. Numerical Study on the Influence of Cone Geometry of Supercavitating Vehicle on Its Tail-slap Motion [J]. Acta Armamentarii, 2024, 45(3): 828-836. |
| [6] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [7] | XIONG Guangming, LUO Zhen, SUN Dong, TAO Junfeng, TANG Zeyue, WU Chao. Object Detection and Tracking for Unmanned Vehicles Based on Fusion of Infrared Camera and MMW Radar in Smoke-obscured Environment [J]. Acta Armamentarii, 2024, 45(3): 893-906. |
| [8] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| [9] | BAO Jian, MA Guihui, SUN Longquan, CHEN Weichu, LI Ming. Simulation of Falling-floating Process of Vehicle with Ellipsoidal Airbags [J]. Acta Armamentarii, 2024, 45(1): 206-218. |
| [10] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [11] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [12] | SHANG Xianhe, ZHANG Fujun, LÜ Hang, LIU Tao, HAN Xuefeng, WANG Miqi. Coordinated Control Strategy for Improving the Starting Performance of Heavy Vehicle [J]. Acta Armamentarii, 2024, 45(1): 264-275. |
| [13] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [14] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [15] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||