
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 71-83.doi: 10.12382/bgxb.2023.0897
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LIU Siyu1, LIAO Junbei1, LEI Fei1, WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3, GUO Zhao1,*( )
)
Received:2023-09-08
Online:2024-01-10
Contact:
GUO Zhao
CLC Number:
LIU Siyu, LIAO Junbei, LEI Fei, WANG Zhirui, YAN Tong, DANG Ruina, GUO Zhao. Design and Optimization of a Parallel Elastic Actuator Leg for Quadruped Robots[J]. Acta Armamentarii, 2023, 44(S2): 71-83.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Quadruped robot with PEA leg

Fig.2 Exploded view of PEA leg
| 名称 | 限位/(°) | 长度/m | 质量/kg |
|---|---|---|---|
| HAA | [-30, 30] | ||
| HFE | [-200, 40] | ||
| KFE | [25, 130] | ||
| 髋 | 0.58 | ||
| 大腿 | 0.220 | 1.48 | |
| 小腿 | 0.201 | 0.15 | |
| 足底 | 0.025 | 0.03 |
Table 1 Mechanical parameters of PEA leg
| 名称 | 限位/(°) | 长度/m | 质量/kg |
|---|---|---|---|
| HAA | [-30, 30] | ||
| HFE | [-200, 40] | ||
| KFE | [25, 130] | ||
| 髋 | 0.58 | ||
| 大腿 | 0.220 | 1.48 | |
| 小腿 | 0.201 | 0.15 | |
| 足底 | 0.025 | 0.03 |
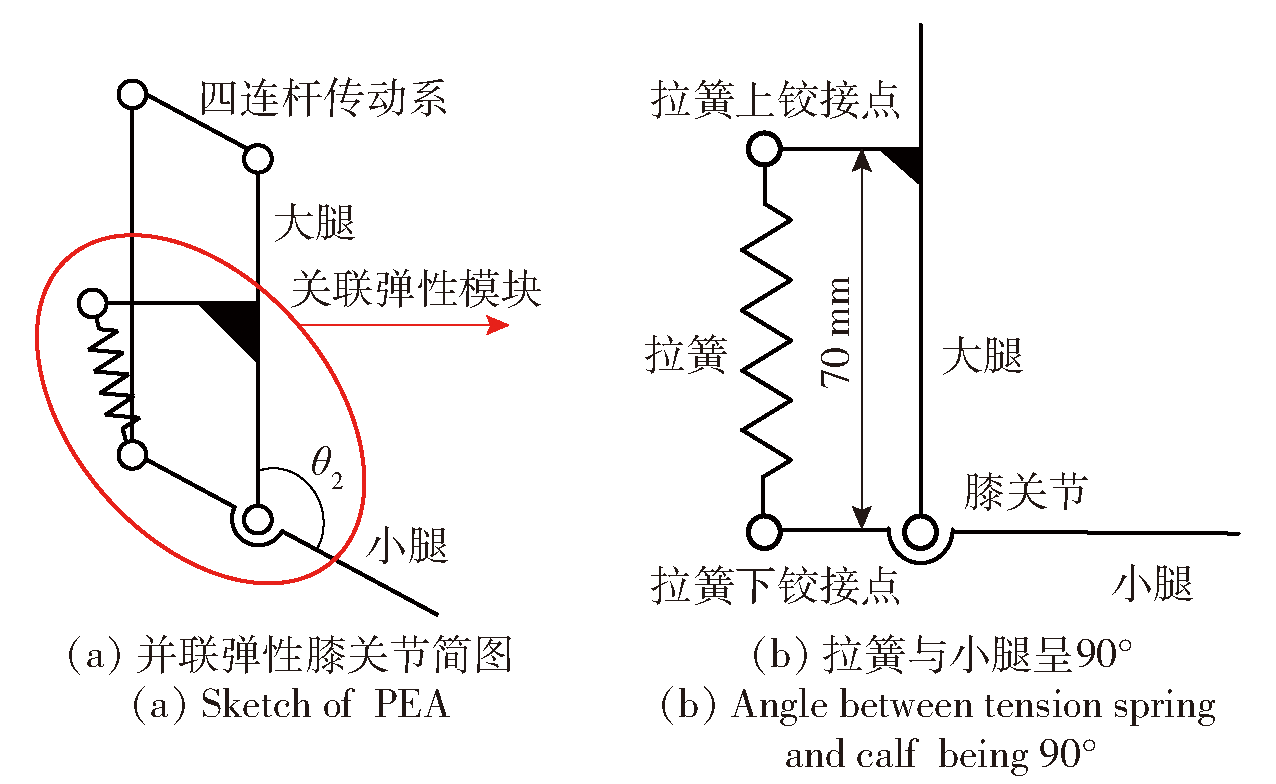
Fig.3 Layout of tension spring
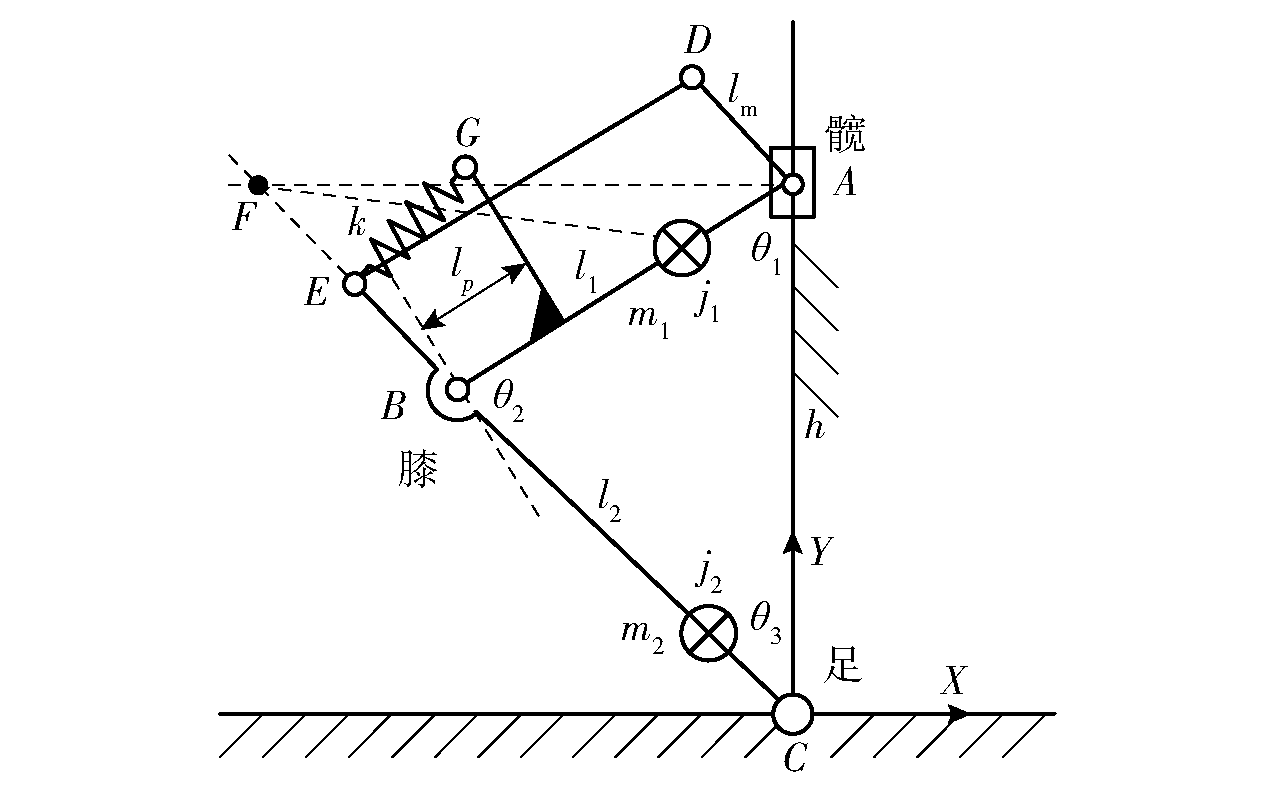
Fig.4 Dynamics model of knee joint driven by PEA
| 参数 | 数值 |
|---|---|
| 输入输出连杆长度lm/m | 0.025 |
| 大腿长度l1/m | 0.220 |
| 小腿长度l2/m | 0.201 |
| 大腿质量m1/kg | 2.064 |
| 小腿质量m2/kg | 0.148 |
| 大腿转动惯量j1/(kg·m2) | 0.004 |
| 小腿转动惯量j2/(kg·m2) | 0.0003 |
| 大腿质心相对于大腿连杆长度的比例r1 | 0.9 |
| 小腿质心相对于小腿连杆长度的比例r2 | 0.2 |
Table 2 Dynamics parameters of PEA leg
| 参数 | 数值 |
|---|---|
| 输入输出连杆长度lm/m | 0.025 |
| 大腿长度l1/m | 0.220 |
| 小腿长度l2/m | 0.201 |
| 大腿质量m1/kg | 2.064 |
| 小腿质量m2/kg | 0.148 |
| 大腿转动惯量j1/(kg·m2) | 0.004 |
| 小腿转动惯量j2/(kg·m2) | 0.0003 |
| 大腿质心相对于大腿连杆长度的比例r1 | 0.9 |
| 小腿质心相对于小腿连杆长度的比例r2 | 0.2 |
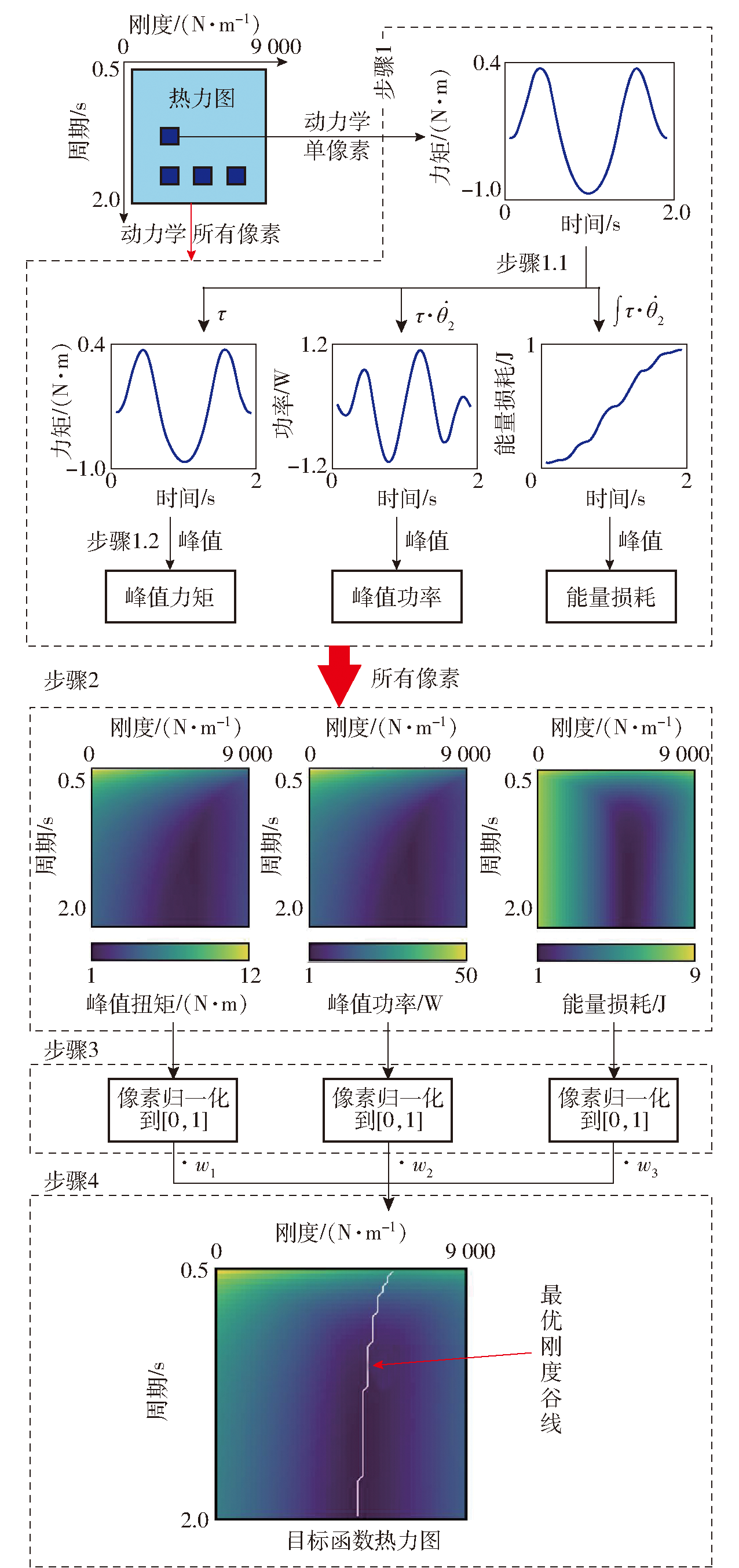
Fig.5 Optimization process of PEA’s tension spring stiffness

Fig.6 Heatmaps of peak torque, peak power, energy consumption and target optimization function
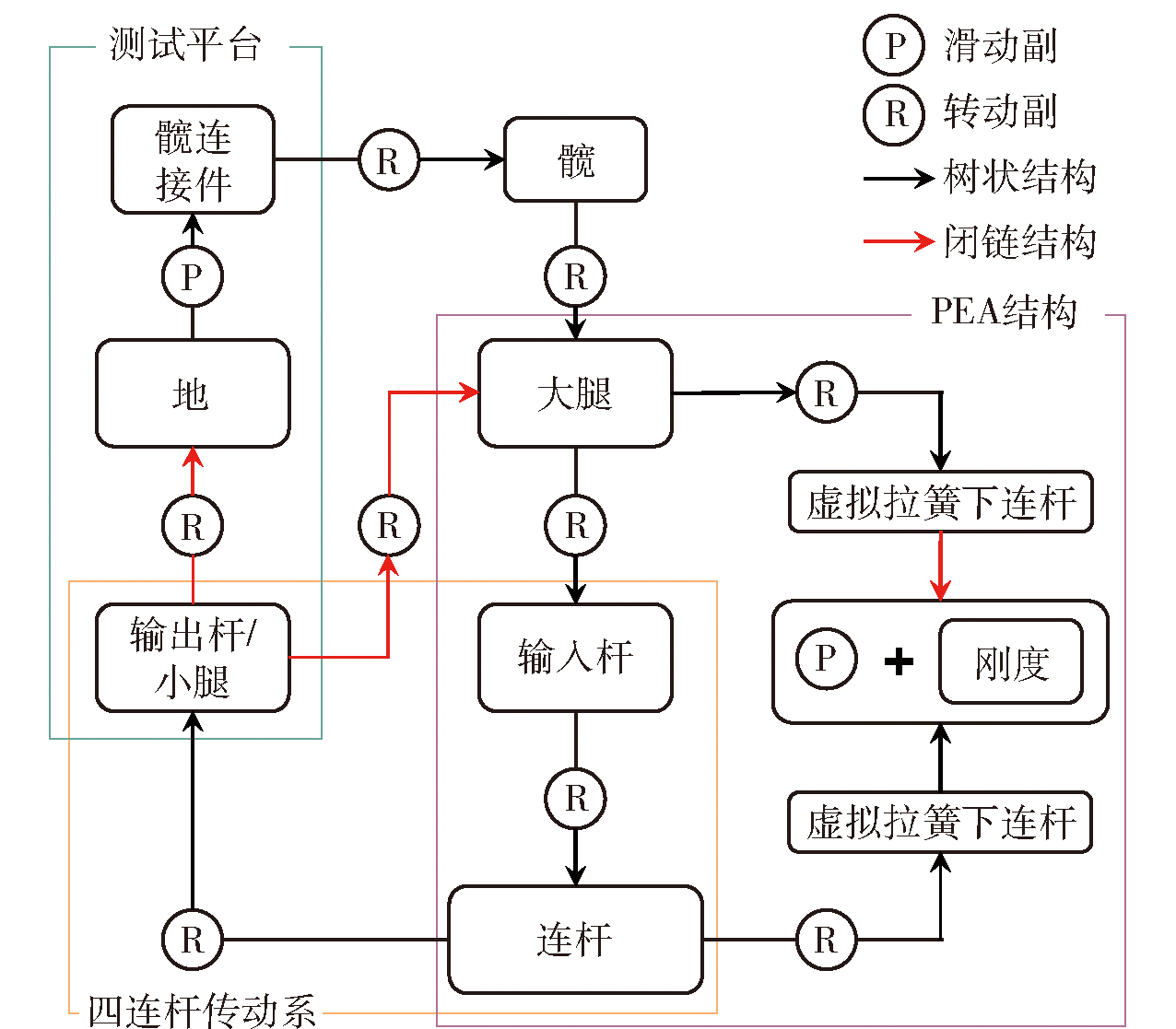
Fig.7 Robot description in Gazebo environment

Fig.8 Virtual tension spring and its working principle

Fig.9 Effectiveness of PEA leg validated from the perspective of motor output characteristics in theory and simulation
| T/s | 理论模型 | 仿真结果 | ||||
|---|---|---|---|---|---|---|
| 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | |
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) | 4.02 (39.88%) | 19.53 (51.59%) | 2.74 (40.10%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) | 4.13 (79.42%) | 10.90 (89.13%) | 6.10 (89.24%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) | 3.36 (77.73%) | 6.50 (84.54%) | 6.11 (89.34%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) | 2.97 (73.98%) | 4.68 (82.01%) | 5.93 (86.72%) |
Table 3 Reduction in quantity and percentage of peak torque, peak power and energy consumption validated by dynamics model and simulation
| T/s | 理论模型 | 仿真结果 | ||||
|---|---|---|---|---|---|---|
| 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | |
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) | 4.02 (39.88%) | 19.53 (51.59%) | 2.74 (40.10%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) | 4.13 (79.42%) | 10.90 (89.13%) | 6.10 (89.24%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) | 3.36 (77.73%) | 6.50 (84.54%) | 6.11 (89.34%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) | 2.97 (73.98%) | 4.68 (82.01%) | 5.93 (86.72%) |

Fig.10 Experiments of forward jumping
| lx/m | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.00 | 4.14 (42.50%) | 18.86 (54.66%) | 3.91 (50.34%) |
| 0.08 | 4.01 (38.11%) | 11.65 (34.88%) | 2.34 (30.50%) |
| 0.16 | 3.94 (21.87%) | 7.76 (29.28%) | 1.92 (12.52%) |
| 0.24 | 3.55 (15.65%) | 4.63 (18.31%) | 0.95 (5.27%) |
Table 4 Reduction in peak torque, peak power, and energy consumption with and without PEA in the experiments of forward jumping
| lx/m | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.00 | 4.14 (42.50%) | 18.86 (54.66%) | 3.91 (50.34%) |
| 0.08 | 4.01 (38.11%) | 11.65 (34.88%) | 2.34 (30.50%) |
| 0.16 | 3.94 (21.87%) | 7.76 (29.28%) | 1.92 (12.52%) |
| 0.24 | 3.55 (15.65%) | 4.63 (18.31%) | 0.95 (5.27%) |

Fig.11 Prototype experiment setup of PEA leg

Fig.12 Effectiveness of PEA leg validated from the perspective of electricity input
| 周期/s | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) |
Table 5 Reduction in quantity and percentage of peak current, peak electrical power and electrical energy consumption for validating PEA’s improvements
| 周期/s | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) |
| [1] |
|
| [2] |
doi: 10.1016/j.asej.2020.11.005 URL |
| [3] |
|
| [4] |
李姗姗, 王洪波, 陈建宇, 等. 新型四足并联军用机器人步态控制算法及仿真[J]. 兵工学报, 2023, 44(3): 895-909.
doi: 10.12382/bgxb.2021.0796 |
|
doi: 10.12382/bgxb.2021.0796 |
|
| [5] |
王琪, 张秀丽, 江磊, 等. 具有2DOF铰接式躯干的仿猎豹四足奔跑机器人[J]. 机器人, 2022, 44(3): 257-266.
doi: 10.13973/j.cnki.robot.210101 |
|
doi: 10.13973/j.cnki.robot.210101 |
|
| [6] |
|
| [7] |
doi: 10.1017/S0263574721001752 URL |
| [8] |
doi: 10.1016/j.robot.2021.103815 URL |
| [9] |
|
| [10] |
doi: 10.1109/TMECH.3516 URL |
| [11] |
魏敦文, 葛文杰, 高涛. 仿生灵感下的弹性驱动器的研究综述[J]. 机器人, 2017, 39(4):541-550.
doi: 10.13973/j.cnki.robot.2017.0541 |
|
doi: 10.13973/j.cnki.robot.2017.0541 |
|
| [12] |
|
| [13] |
|
| [14] |
doi: 10.1109/TMECH.2018.2871670 URL |
| [15] |
doi: 10.1109/TRO.2016.2604496 URL |
| [16] |
|
| [17] |
韩亚丽, 贾山, 王兴松. 基于人体生物力学的低功耗踝关节假肢的设计与仿真[J]. 机器人, 2013, 35(3): 276-282.
|
|
doi: 10.3724/SP.J.1218.2013.00276 URL |
|
| [18] |
doi: 10.1109/LRA.2023.3234809 URL |
| [19] |
doi: 10.1016/j.mechmachtheory.2020.103814 URL |
| [20] |
doi: 10.1109/LRA.2019.2893425 URL |
| [21] |
doi: 10.1109/TRO.2022.3197088 URL |
| [22] |
doi: 10.1109/TMECH.2021.3052037 URL |
| [23] |
doi: 10.3389/frobt.2021.713083 URL |
| [24] |
|
| [25] |
doi: 10.1016/j.simpat.2022.102629 URL |
| [1] | LIU Qian, ZHANG Zhuxin, ZHAO Dingxuan, WANG Hui, QIN Zhanyong. Electric Landing Assist Device of Shipborne Helicopters and Its Key Characteristics Analysis [J]. Acta Armamentarii, 2024, 45(1): 241-252. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||