
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (8): 2224-2232.doi: 10.12382/bgxb.2022.0968
Previous Articles Next Articles
WANG Lei1, XU Chao1, LI Miao1, ZHAO Huiwu2,*( )
)
Received:2022-10-24
Online:2023-08-30
Contact:
ZHAO Huiwu
CLC Number:
WANG Lei, XU Chao, LI Miao, ZHAO Huiwu. Improved Particle Swarm Optimization Algorithm for Cooperative Task Assignment of Multiple vehicles[J]. Acta Armamentarii, 2023, 44(8): 2224-2232.
Add to citation manager EndNote|Ris|BibTeX
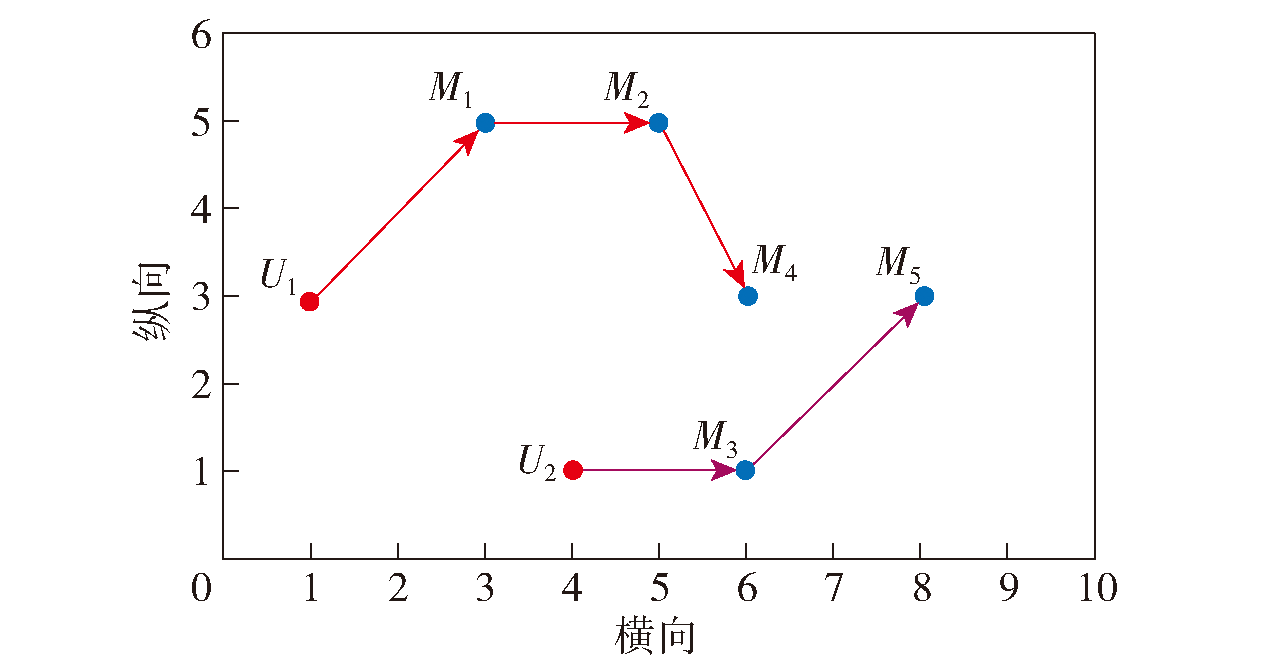
Fig.1 Schematic diagram of multi-aircraft cooperative task assignment
| Ak | 2 | 2 | 2 | 2 | 3 | 3 | 2 | 2 | 1 | 1 | 1 | 1 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Yk | 0.02 | 0.8 | 0.85 | 0.71 | 1.30 | 1.31 | 0.28 | 0.79 | 1.66 | 2.86 | 2.93 | 2.34 | 1.33 | 2.77 |
| Zk | -1.21 | 0.62 | 0.73 | 1.22 | 0.26 | 0.21 | 0.60 | 0.97 | 1.25 | 1.93 | 0.34 | 0.01 | 0.21 | 1.21 |
Table 1 Position, velocity and corresponding distribution vector of a particle
| Ak | 2 | 2 | 2 | 2 | 3 | 3 | 2 | 2 | 1 | 1 | 1 | 1 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Yk | 0.02 | 0.8 | 0.85 | 0.71 | 1.30 | 1.31 | 0.28 | 0.79 | 1.66 | 2.86 | 2.93 | 2.34 | 1.33 | 2.77 |
| Zk | -1.21 | 0.62 | 0.73 | 1.22 | 0.26 | 0.21 | 0.60 | 0.97 | 1.25 | 1.93 | 0.34 | 0.01 | 0.21 | 1.21 |
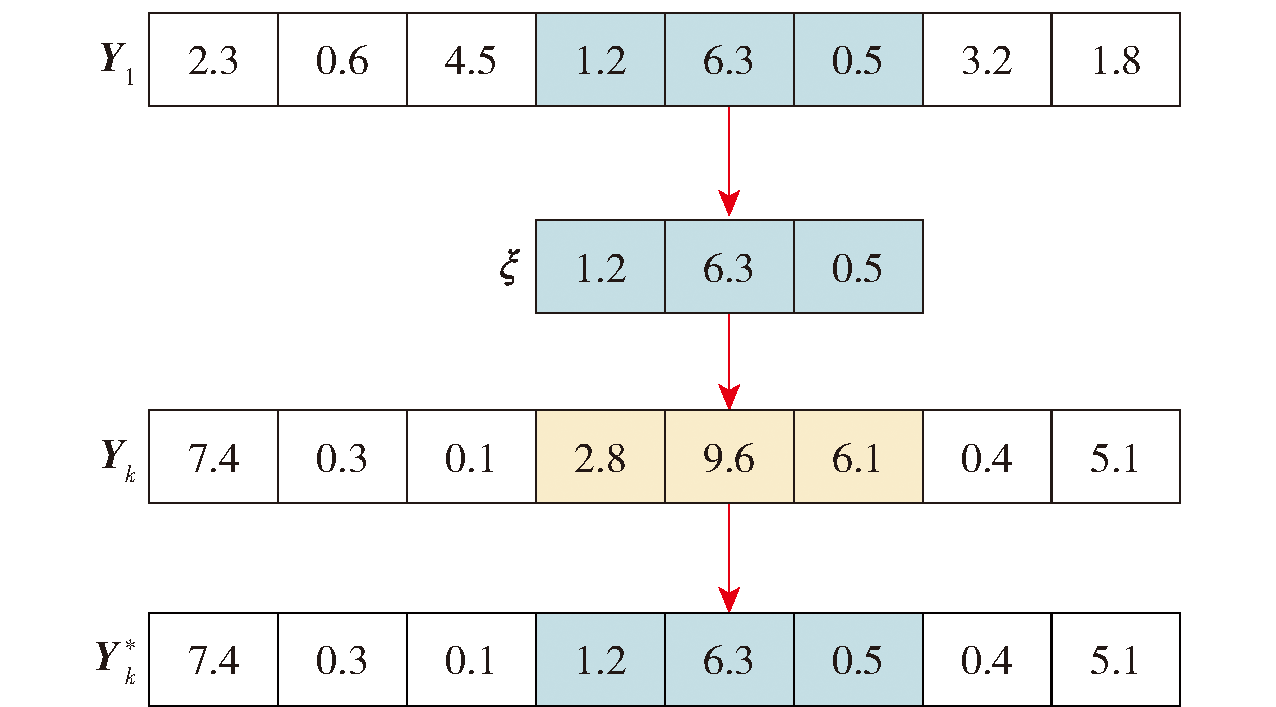
Fig.2 New particle position vector crossing and replacement
| 目标 | 位置/10-1km | 价值 | 威胁概率 |
|---|---|---|---|
| T1 | (67,23) | 20 | 0.1 |
| T2 | (65,70) | 30 | 0.2 |
| T3 | (25,55) | 25 | 0.3 |
| T4 | (8,32) | 40 | 0.2 |
| T5 | (35,30) | 50 | 0.1 |
| T6 | (40,44) | 30 | 0.2 |
| T7 | (42,90) | 25 | 0.15 |
| T8 | (19,40) | 40 | 0.2 |
| T9 | (60,35) | 25 | 0.3 |
| T10 | (66,55) | 30 | 0.2 |
| T11 | (80,98) | 50 | 0.12 |
| T12 | (94,89) | 50 | 0.25 |
| T13 | (32,65) | 40 | 0.2 |
| T14 | (87,30) | 30 | 0.1 |
| T15 | (87,30) | 30 | 0. |
Table 2 Target situations
| 目标 | 位置/10-1km | 价值 | 威胁概率 |
|---|---|---|---|
| T1 | (67,23) | 20 | 0.1 |
| T2 | (65,70) | 30 | 0.2 |
| T3 | (25,55) | 25 | 0.3 |
| T4 | (8,32) | 40 | 0.2 |
| T5 | (35,30) | 50 | 0.1 |
| T6 | (40,44) | 30 | 0.2 |
| T7 | (42,90) | 25 | 0.15 |
| T8 | (19,40) | 40 | 0.2 |
| T9 | (60,35) | 25 | 0.3 |
| T10 | (66,55) | 30 | 0.2 |
| T11 | (80,98) | 50 | 0.12 |
| T12 | (94,89) | 50 | 0.25 |
| T13 | (32,65) | 40 | 0.2 |
| T14 | (87,30) | 30 | 0.1 |
| T15 | (87,30) | 30 | 0. |
| 编号 | 位置/10-1km | 价值 | 杀伤概率 | 任务上限 |
|---|---|---|---|---|
| U1 | (45,3) | 130 | 0.9 | 5 |
| U2 | (34,5) | 100 | 0.8 | 5 |
| U3 | (23,3) | 80 | 0.7 | 5 |
Table 3 UAV situations
| 编号 | 位置/10-1km | 价值 | 杀伤概率 | 任务上限 |
|---|---|---|---|---|
| U1 | (45,3) | 130 | 0.9 | 5 |
| U2 | (34,5) | 100 | 0.8 | 5 |
| U3 | (23,3) | 80 | 0.7 | 5 |
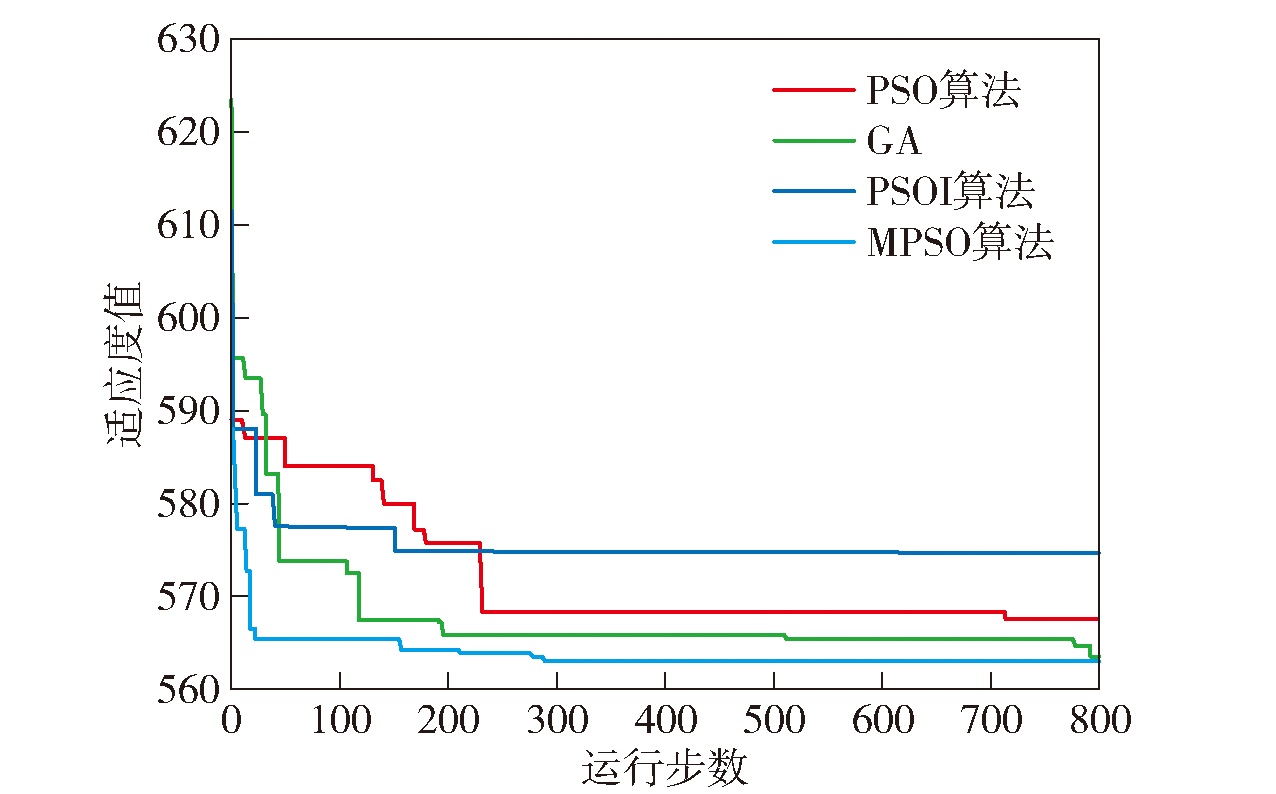
Fig.3 Change of system program operation fitness value
| 算法 | U1 | U2 | U3 |
|---|---|---|---|
| MPSO算法 | <T16, T13, T7, T2,T10> | <T14, T6, T5, T9> | <T11, T1, T8, T4, T12> |
| PSO1算法 | <T11, T12, T14, T15, T4> | <T1, T2, T3, T5,T8> | <T6, T7, T9, T10, T13> |
| PSO算法 | <T3, T11, T8, T6, T13> | <T5, T14, T15, T7, T9> | < T2, T12, T11, T4, T10> |
| GA | <T4, T7, T10, T9, T12> | <T3, T11, T2, T15, T1> | < T6, T8, T5, T13, T14> |
Table 4 Optimal assignment solutions of different algorithms
| 算法 | U1 | U2 | U3 |
|---|---|---|---|
| MPSO算法 | <T16, T13, T7, T2,T10> | <T14, T6, T5, T9> | <T11, T1, T8, T4, T12> |
| PSO1算法 | <T11, T12, T14, T15, T4> | <T1, T2, T3, T5,T8> | <T6, T7, T9, T10, T13> |
| PSO算法 | <T3, T11, T8, T6, T13> | <T5, T14, T15, T7, T9> | < T2, T12, T11, T4, T10> |
| GA | <T4, T7, T10, T9, T12> | <T3, T11, T2, T15, T1> | < T6, T8, T5, T13, T14> |
| 算法 | 最优适应度值 | 平均适应度值 | 平均运行时间/s |
|---|---|---|---|
| MPSO算法 | 562.85 | 563.45 | 20.2 |
| PSO1算法 | 574.55 | 575.30 | 25.3 |
| PSO算法 | 567.44 | 568.81 | 26.3 |
| GA | 563.08 | 567.63 | 15.9 |
Table 5 Comparison of average fitness value and optimal fitness value under different algorithms
| 算法 | 最优适应度值 | 平均适应度值 | 平均运行时间/s |
|---|---|---|---|
| MPSO算法 | 562.85 | 563.45 | 20.2 |
| PSO1算法 | 574.55 | 575.30 | 25.3 |
| PSO算法 | 567.44 | 568.81 | 26.3 |
| GA | 563.08 | 567.63 | 15.9 |
| [1] |
牛轶峰, 肖湘江, 柯冠岩. 无人机集群作战概念及关键技术分析[J]. 国防科技, 2013, 34(5):37-43.
|
|
|
|
| [2] |
|
| [3] |
齐小刚, 李博, 范英盛, 等. 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15(2):204-217.
|
|
|
|
| [4] |
doi: 10.1016/j.cor.2010.06.001 URL |
| [5] |
doi: 10.2514/1.C032309 URL |
| [6] |
韩健. 基于多Agent的无人机协作控制[D]. 哈尔滨: 哈尔滨工业大学, 2012.
|
|
|
|
| [7] |
|
| [8] |
doi: 10.1007/s10846-014-0154-2 URL |
| [9] |
|
| [10] |
苏菲, 陈岩, 沈林成. 基于蚁群算法的无人机协同多任务分配[J]. 航空学报, 2008, 29(5): 184-191.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1016/j.engappai.2010.12.002 URL |
| [14] |
doi: 10.1007/s12530-012-9058-1 URL |
| [15] |
|
| [16] |
李炜, 张伟. 基于粒子群算法的多无人机任务分配方法[J]. 控制与决策, 2010, 25(9):1359-1363.
|
|
|
|
| [17] |
|
| [18] |
doi: 10.1177/1059712316651686 URL |
| [19] |
李鹏, 李兵舰, 亓亮, 等. 一种改进的粒子群优化算法及其在无人机航路规划中的应用[J]. 舰船电子对抗, 2019, 42(5):59-64.
|
|
|
|
| [20] |
熊华捷, 蔚保国, 何成龙. 基于改进粒子群算法的UAV航迹规划方法[J]. 计算机测量与控制, 2020, 28(2):144-147.
|
|
|
| [1] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [2] | FAN Boyang, ZHAO Gaopeng, BO Yuming, WU Xiang. Collaborative Task Allocation Method for Multi-Target Air-Ground Heterogeneous Unmanned System [J]. Acta Armamentarii, 2023, 44(6): 1564-1575. |
| [3] | DU Weiwei, CHEN Xiaowei. Task Assignment and Optimization Method of Tactical-Level Army Operations [J]. Acta Armamentarii, 2023, 44(5): 1431-1442. |
| [4] | CHEN Meishan, LIU Ying, ZENG Weigui, QIAN Kun. Dynamic Jamming Resource Allocation Strategy of MALD [J]. Acta Armamentarii, 2023, 44(5): 1443-1455. |
| [5] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [6] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [7] | LI Ye, ZHENG Chun, MA Changsheng, QIU Rongxian. Target Assignment Model for High-Power Microwave Weapon System and Medium and Short-range Air Defense Weapons in Cooperative Combat Based on Maximizing Interception Efficiency [J]. Acta Armamentarii, 2023, 44(11): 3489-3497. |
| [8] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [9] | SHUAI Yong, SONG Tai-liang, WANG Jian-ping, SHEN Hong. An Improved Parallel Prediction Model of Equipment Support Capability [J]. Acta Armamentarii, 2016, 37(6): 1089-1095. |
| [10] | ZHANG Yong-qiang, XU Zong-chang, SUN Han-bing, HU Chun-yang. Optimization of Carried Spare Parts Based on Monte Carlo Simulation and Parallel Particle Swarm Optimization Algorithm [J]. Acta Armamentarii, 2016, 37(1): 122-130. |
| [11] | ZHU Xia, CHEN Ren-wen, XIA Hua-kang, ZHANG Piao-yan. A Novel Image Registration Based on Cultural Particle Swarm Optimization Algorithm [J]. Acta Armamentarii, 2015, 36(6): 1033-1039. |
| [12] | WANG Chao, LIU Rong-zhong, HOU Yuan-long, GAO Qiang, WANG Li. Electric Load Simulator Control Based on a Novel Wavelet Neural Network and Grey Prediction [J]. Acta Armamentarii, 2014, 35(12): 1959-1966. |
| [13] | XIANG Yu, MA Xiao-jun, LIU Chun-guang, KE Rong-shuo, ZHAO Zi-xu. Estimation of Model Parameters and SOC of Lithium Batteries Based on IPSO-EKF [J]. Acta Armamentarii, 2014, 35(10): 1659-1666. |
| [14] | HU Ling-ling, GUO Ye-cai. Orthogonal Wavelet Transform Dynamic Weighted Multi-modulus Blind Equalization Algorithm Based on Dynamic Particle Swarm [J]. Acta Armamentarii, 2013, 34(12): 1547-1554. |
| [15] | SUN Yu-shan, LI Yue-ming, ZHANG Ying-hao, WAN Lei. Improved Simulated Annealing Algorithm and Its Application in Adjusting of S Plane Parameters in AUV Motion Control [J]. Acta Armamentarii, 2013, 34(11): 1418-1423. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||