
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 240904-.doi: 10.12382/bgxb.2024.0904
Previous Articles Next Articles
LI Qin1,*( ), HE Hongwen1,**(), HU Manjiang2
), HE Hongwen1,**(), HU Manjiang2
Received:2024-09-29
Online:2025-08-28
Contact:
LI Qin, HE Hongwen
CLC Number:
LI Qin, HE Hongwen, HU Manjiang. Model Predictive Control of Unmanned Vehicle Trajectory Tracking Based on Gaussian Process Regression[J]. Acta Armamentarii, 2025, 46(8): 240904-.
Add to citation manager EndNote|Ris|BibTeX
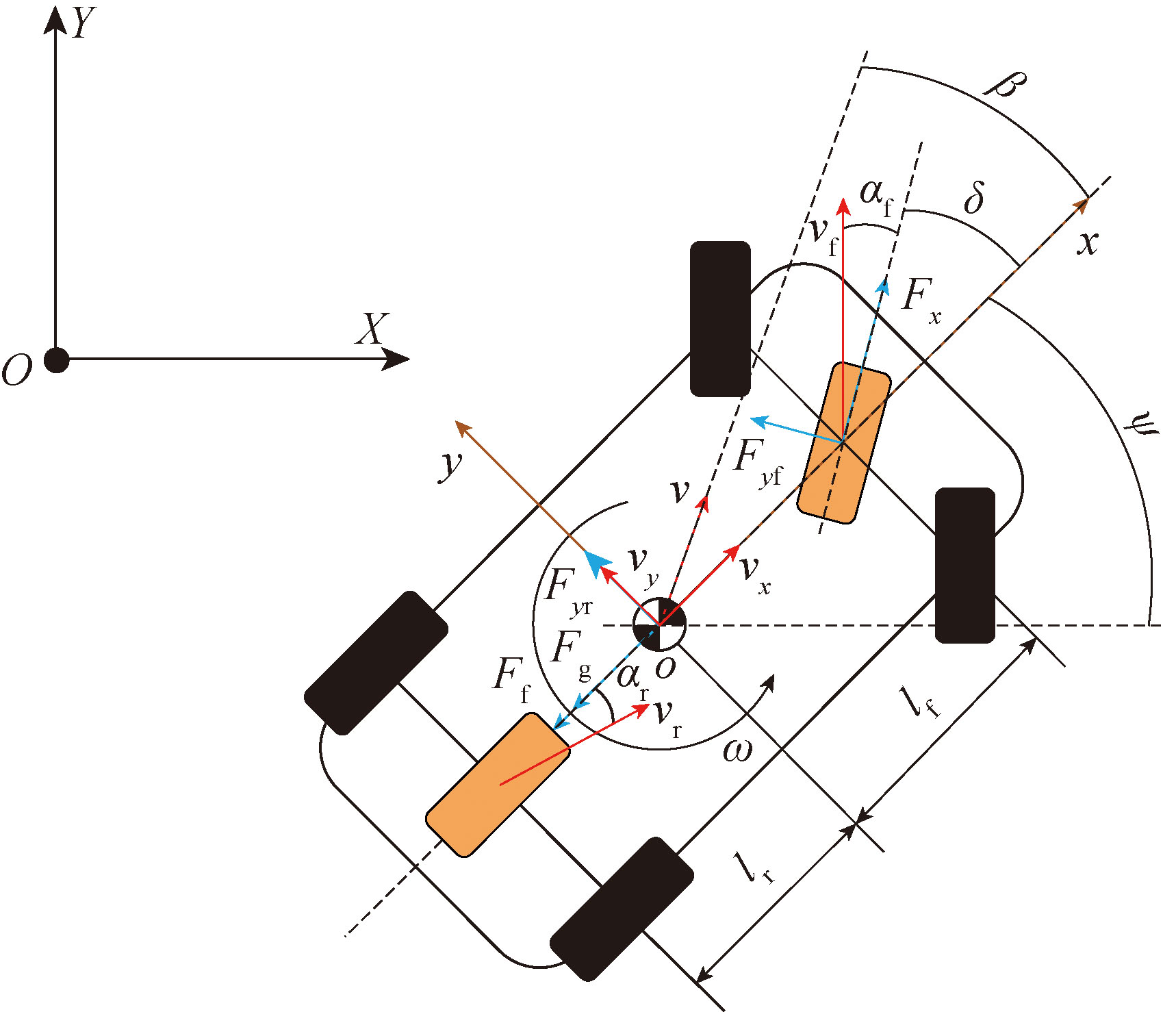
Fig.1 3DOF Single track vehicle dynamics model

Fig.2 Vehicle state estimation framework based on GPR combined with EKF
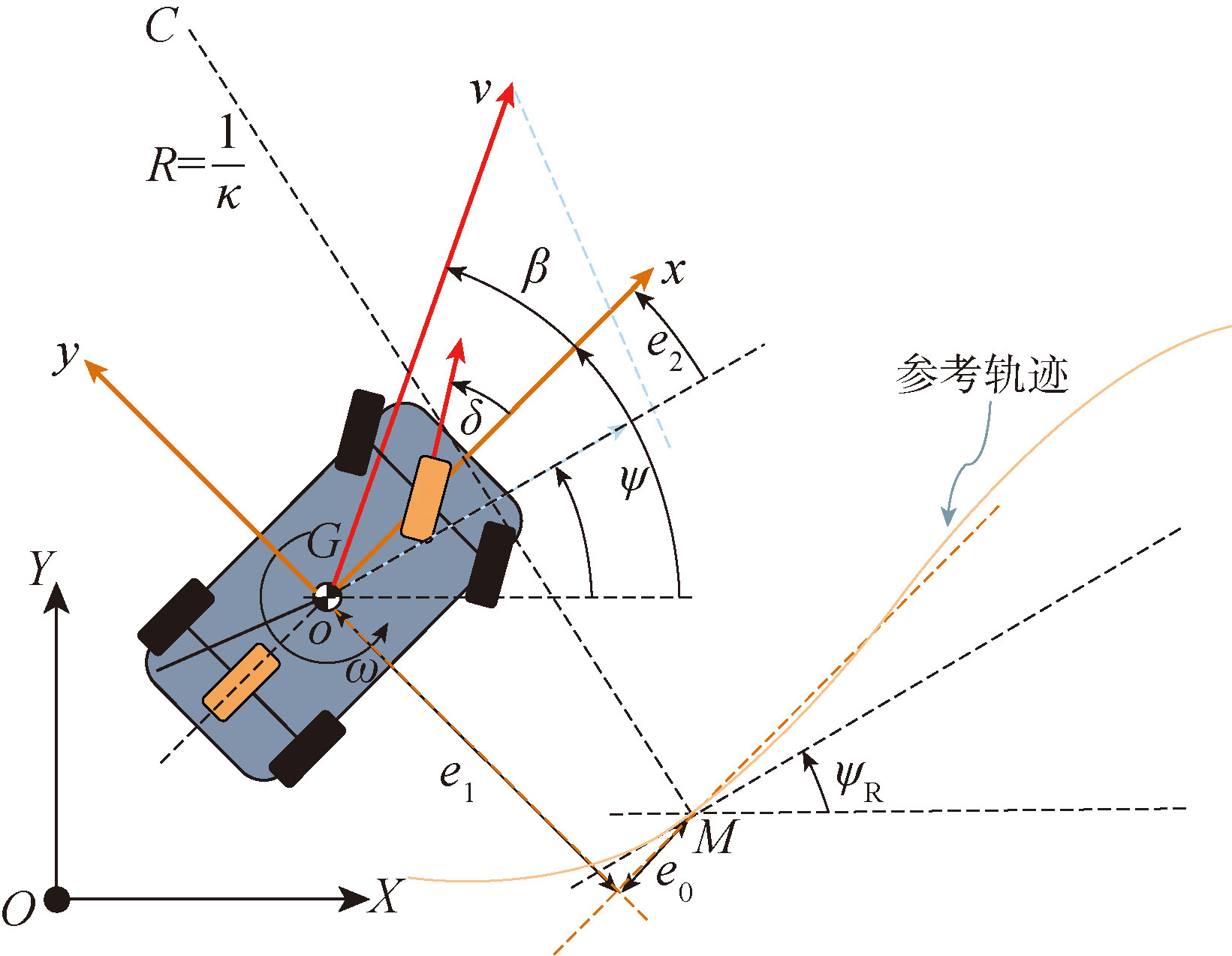
Fig.3 Trajectory tracking error model
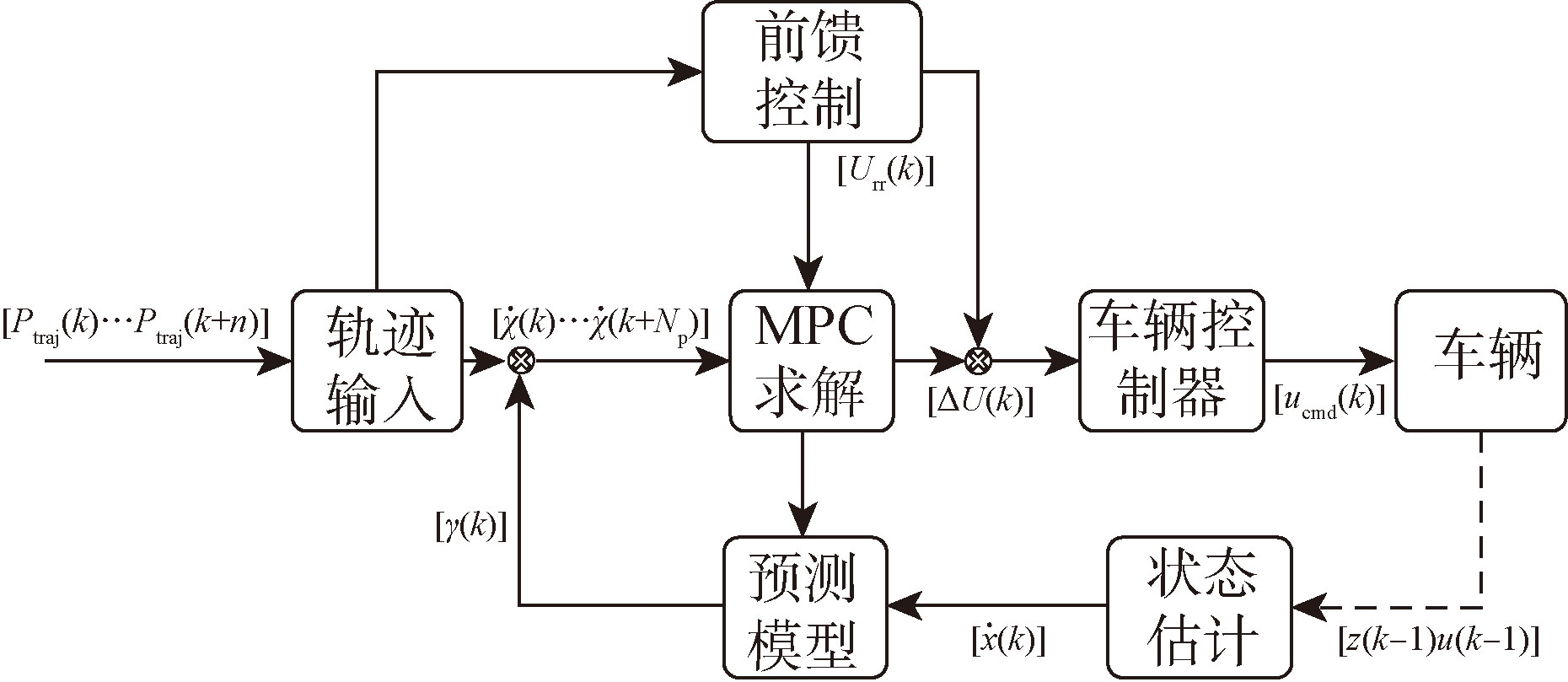
Fig.4 Trajectory tracking algorithm architecture
| 参数 | 描述 | 数值 |
|---|---|---|
| m/kg | 整车质量 | 2063.4 |
| lf/mm | 前半轴距 | 1351.8 |
| lr/mm | 后半轴距 | 1548.2 |
| Cf/(N·rad-1) | 前轮等效侧偏刚度 | 100640 |
| Cr/(N·rad-1) | 后轮等效侧偏刚度 | 100640 |
| Rtire/mm | 等效轮胎滚动半径 | 366 |
| Iz/(kg·m2) | 绕Z轴的转动惯量 | 3347.8 |
Table 1 Key parameters of vehicle
| 参数 | 描述 | 数值 |
|---|---|---|
| m/kg | 整车质量 | 2063.4 |
| lf/mm | 前半轴距 | 1351.8 |
| lr/mm | 后半轴距 | 1548.2 |
| Cf/(N·rad-1) | 前轮等效侧偏刚度 | 100640 |
| Cr/(N·rad-1) | 后轮等效侧偏刚度 | 100640 |
| Rtire/mm | 等效轮胎滚动半径 | 366 |
| Iz/(kg·m2) | 绕Z轴的转动惯量 | 3347.8 |

Fig.5 Vehicle test
| 估计方法 | 测试工况 | βRMSE/(°) | ωRMSE/((°)·s-1) |
|---|---|---|---|
| EKF | 蛇形 | 0.4863 | 2.6734 |
| U-Turn | 0.1934 | 1.1264 | |
| GPR-EKF | 蛇形 | 0.2528 | 0.4836 |
| U-Turn | 0.1403 | 0.3838 |
Table 2 The test results of fusion state estimation methods
| 估计方法 | 测试工况 | βRMSE/(°) | ωRMSE/((°)·s-1) |
|---|---|---|---|
| EKF | 蛇形 | 0.4863 | 2.6734 |
| U-Turn | 0.1934 | 1.1264 | |
| GPR-EKF | 蛇形 | 0.2528 | 0.4836 |
| U-Turn | 0.1403 | 0.3838 |
| 线程 | 99%分位耗时 | 平均耗时 | 最大耗时 |
|---|---|---|---|
| GPR | 7.859 | 6.453 | 9.370 |
| MPC | 1.021 | 0.976 | 1.350 |
Table 3 Time-consuming test of key modules ms
| 线程 | 99%分位耗时 | 平均耗时 | 最大耗时 |
|---|---|---|---|
| GPR | 7.859 | 6.453 | 9.370 |
| MPC | 1.021 | 0.976 | 1.350 |
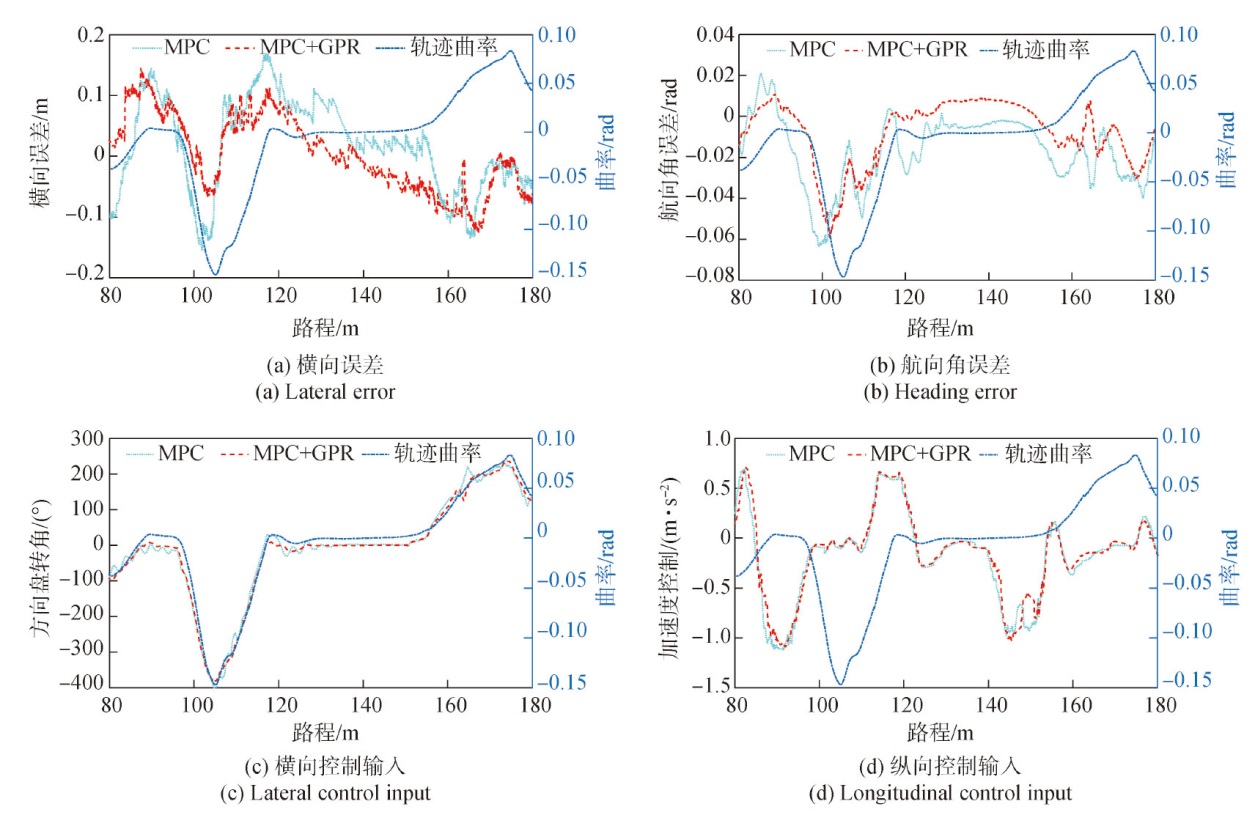
Fig.6 Comparative analysis of different control algorithms
| 参数 | MPC | MPC+GPR | 性能提升/% |
|---|---|---|---|
| e1_mean/m | 0.0858 | 0.0572 | 33.3 |
| e1_max/m | 0.1690 | 0.1450 | 14.2 |
| e2_mean/rad | 0.0269 | 0.0194 | 27.9 |
| e2_max/rad | 0.0635 | 0.0595 | 6.3 |
Table 4 Control errors of different controllers
| 参数 | MPC | MPC+GPR | 性能提升/% |
|---|---|---|---|
| e1_mean/m | 0.0858 | 0.0572 | 33.3 |
| e1_max/m | 0.1690 | 0.1450 | 14.2 |
| e2_mean/rad | 0.0269 | 0.0194 | 27.9 |
| e2_max/rad | 0.0635 | 0.0595 | 6.3 |
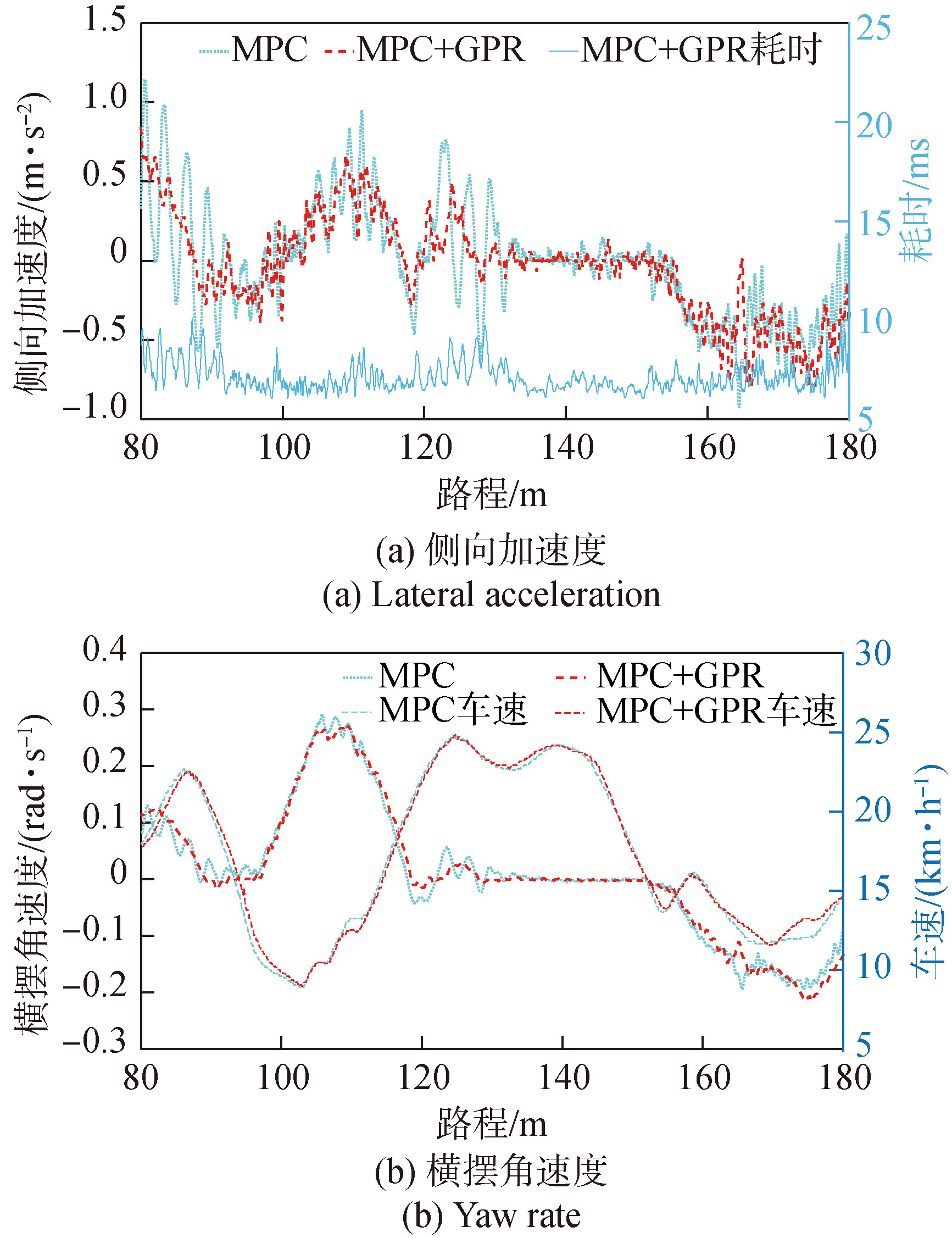
Fig.7 Vehicle states under different control conditions
| 舒适性参数 | MPC | MPC+GPR | 性能提升/% |
|---|---|---|---|
| ay_mean/(m·s-2) | 0.289 | 0.240 | 17.1 |
| ay_max/(m·s-2) | 1.143 | 0.831 | 27.4 |
| ωmean/(rad·s-1) | 0.114 | 0.089 | 21.7 |
| ωmax/(rad·s-1) | 0.291 | 0.261 | 10.2 |
Table 5 Analysis of vehicle states under different controllers
| 舒适性参数 | MPC | MPC+GPR | 性能提升/% |
|---|---|---|---|
| ay_mean/(m·s-2) | 0.289 | 0.240 | 17.1 |
| ay_max/(m·s-2) | 1.143 | 0.831 | 27.4 |
| ωmean/(rad·s-1) | 0.114 | 0.089 | 21.7 |
| ωmax/(rad·s-1) | 0.291 | 0.261 | 10.2 |
| [1] |
熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143.
doi: 10.3901/JME.2020.10.127 |
|
doi: 10.3901/JME.2020.10.127 |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
doi: 10.1109/TNNLS.2020.3048305 pmid: 33471771 |
| [9] |
许芳, 张君明, 胡云峰, 等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报(工学版), 2021, 51(6):2287-2294.
|
|
|
|
| [10] |
唐泽月, 刘海鸥, 薛明轩, 等. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1):129-139.
doi: 10.12382/bgxb.2022.0886 |
|
doi: 10.12382/bgxb.2022.0886 |
|
| [11] |
|
| [12] |
doi: 10.1038/s41598-022-17351-4 pmid: 35915140 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [1] | ZHANG Fawang, CHEN Liangfa, DUAN Jingliang, LIU Hui, NIE Shida, ZHANG Chen. Bi-level Strategy Trajectory Tracking Control of Multi-axle Articulated Wheeled Vehicle [J]. Acta Armamentarii, 2025, 46(8): 240954-. |
| [2] | WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination [J]. Acta Armamentarii, 2025, 46(7): 240575-. |
| [3] | XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot [J]. Acta Armamentarii, 2025, 46(2): 240183-. |
| [4] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [5] | REN Hongbin, SUN Jiyu, Chih-Keng CHEN, ZHAO Yuzhuang, YANG Lin. LTV-MPC-based Real-time and Anti-noise Motion Control for High-speed Vehicle [J]. Acta Armamentarii, 2024, 45(12): 4311-4322. |
| [6] | WANG Xu, GAO Xiaoyu, HUANG Ying, CUI Tao, LUO Chengliang. Power Coordinated Predictive Control of Hybrid Amphibious Vehicle with Model Mismatch [J]. Acta Armamentarii, 2024, 45(12): 4578-4588. |
| [7] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [8] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Wheeled L-quadruped Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 2024, 45(12): 4272-4282. |
| [9] | WANG Tianxiang, CUI Tao, ZHANG Fujun, ZHAO Yankai. MPC-based Intake Pressure Control of Electric Compound Supercharged Diesel Engine [J]. Acta Armamentarii, 2024, 45(10): 3642-3653. |
| [10] | ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control [J]. Acta Armamentarii, 2024, 45(10): 3619-3630. |
| [11] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [12] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [13] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [14] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [15] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||