
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240079-.doi: 10.12382/bgxb.2024.0079
栾可迪1, 郭保桥1,*( ), 魏中亮2, 谷源森1, 王岗亭3, 邓丽莎1, 陈鹏万1
), 魏中亮2, 谷源森1, 王岗亭3, 邓丽莎1, 陈鹏万1
收稿日期:2024-01-25
上线日期:2024-04-18
通讯作者:
LUAN Kedi1, GUO Baoqiao1,*(), WEI Zhongliang2, GU Yuansen1, WANG Gangting3, DENG Lisha1, CHEN Pengwan1
Received:2024-01-25
Online:2024-04-18
摘要:
随着信息技术的进步,装甲车辆的人机交互方式不断更新,为探究新型多模态交互下乘员的任务绩效,指导未来装甲车辆多模态操作、告警方式的设计,建立一套可集成多模态交互、可调节环境负荷大小的新型人机交互实验系统。基于该系统,招募20名成年男性开展了操作(输入)方式、告警(输出)方式和环境负荷水平的三因素工效学实验。在虚拟实验平台中完成不同实验条件下的模拟击打目标实验,分析被试的任务绩效。实验结果表明:相对于在触屏输入或语音输入下,机械输入下乘员的反应时间最短,但乘员操作错误率最高;机械输入和触屏输入下乘员的任务完成时间远优于语音输入;相对于单模态视觉告警,叠加了触觉告警的视觉+触觉(Visual+Tactile,V+T)双模态告警会显著缩短乘员反应时间,而叠加了听觉告警的视觉+听觉(Visual+ Auditory,V+A)告警则无明显差异;V+T或V+A双模态告警可以显著缩短乘员任务完成时间;对于环境负荷的影响,低环境负荷下乘员任务绩效明显高于高环境负荷;随着环境负荷的增加,V+T告警中叠加听觉告警会造成告警冗余;该研究可为装甲车辆舱室多模态人机交互设计提供实践依据。
中图分类号:
栾可迪, 郭保桥, 魏中亮, 谷源森, 王岗亭, 邓丽莎, 陈鹏万. 装甲车辆多模态交互和环境负荷对乘员任务绩效的影响[J]. 兵工学报, 2025, 46(4): 240079-.
LUAN Kedi, GUO Baoqiao, WEI Zhongliang, GU Yuansen, WANG Gangting, DENG Lisha, CHEN Pengwan. Effects of Armored Vehicle Multi-modal Interactions and Environmental Load on Mission Performance of Occupant[J]. Acta Armamentarii, 2025, 46(4): 240079-.
| 设备 | 参数 |
|---|---|
| 噪声发生设备 | 2.0声道,最大功率40W |
| 可调光强式光源 | 额定功率14.5W(72×0.2W/LED模块) |
| 数字照度计 | 量程0.1~99990lx、0.1~999.9lx,分度值0.1lx;1000~99990lx,分度值1lx |
| 数字噪声计 | 量程30~130dB,分度值0.1dB |
| 视频采集设备 | 300万像素,帧率30帧/s |
表1 测量采集设备及其参数
Table 1 Measuring and acquiring equipment and their parameters
| 设备 | 参数 |
|---|---|
| 噪声发生设备 | 2.0声道,最大功率40W |
| 可调光强式光源 | 额定功率14.5W(72×0.2W/LED模块) |
| 数字照度计 | 量程0.1~99990lx、0.1~999.9lx,分度值0.1lx;1000~99990lx,分度值1lx |
| 数字噪声计 | 量程30~130dB,分度值0.1dB |
| 视频采集设备 | 300万像素,帧率30帧/s |

图1 装甲车辆虚拟仿真软件的界面
Fig.1 Interface of armored vehicle virtual simulation software
图2 振动手环工作原理
Fig.2 Operating principle of vibration bracelet
图3 装甲车辆多模态人机交互实验系统
Fig.3 Armored vehicle multi-modal human-computer interaction test system
图4 敌方车辆与我方车辆相对方位图
Fig.4 Azimuth map of enemy vehicles relative to ours
| 序号 | 方位 |
|---|---|
| 1 | 东偏南45° |
| 2 | 东偏北45° |
| 3 | 东偏南10° |
| 4 | 东偏南50° |
| 5 | 东偏北10° |
| 6 | 东偏北50° |
表2 敌方车辆方位信息
Table 2 Enemy vehicles location information
| 序号 | 方位 |
|---|---|
| 1 | 东偏南45° |
| 2 | 东偏北45° |
| 3 | 东偏南10° |
| 4 | 东偏南50° |
| 5 | 东偏北10° |
| 6 | 东偏北50° |
| 因素1 | 因素2 | 因素3 |
|---|---|---|
| 低环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 高环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T |
表3 不同实验条件的设定
Table 3 Setting of different experimental conditions
| 因素1 | 因素2 | 因素3 |
|---|---|---|
| 低环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 高环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T |
| 实验编号类型 | 敌方车辆波次 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 奇数 | 1 | 2、5 | 6 | 3、4 |
| 偶数 | 2 | 1、3 | 4 | 5、6 |
表4 不同模态下敌方车辆(编号)出现的顺序
Table 4 Order in which enemy vehicles appear in different modes
| 实验编号类型 | 敌方车辆波次 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 奇数 | 1 | 2、5 | 6 | 3、4 |
| 偶数 | 2 | 1、3 | 4 | 5、6 |
图5 反应时间与歼敌时间
Fig.5 Reaction time and annihilation time
| 环境 负荷 | 输入 方式 | 输出 方式 | 反应时间/s | 任务完成时间/s | 操作错 误数 | 操作错 误率/% | ||
|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | |||||
| 低环 境负 荷 | 机械 输入 | V | 1.31 | 0.94 | 77.88 | 16.76 | 20 | 16.67 |
| V+A | 1.20 | 0.69 | 68.77 | 11.35 | 14 | 11.67 | ||
| V+T | 1.06 | 0.63 | 66.15 | 8.93 | 9 | 7.50 | ||
| V+A+T | 1.05 | 0.72 | 69.23 | 11.30 | 10 | 8.33 | ||
| 触屏 输入 | V | 2.01 | 0.89 | 75.18 | 10.74 | 1 | 0.83 | |
| V+A | 2.00 | 0.86 | 70.54 | 10.32 | 2 | 1.67 | ||
| V+T | 1.74 | 0.76 | 68.21 | 5.50 | 1 | 0.83 | ||
| V+A+T | 1.65 | 0.82 | 68.51 | 7.07 | 2 | 1.67 | ||
| 语音 输入 | V | 4.58 | 1.25 | 122.78 | 20.86 | 2 | 1.67 | |
| V+A | 4.22 | 1.09 | 112.23 | 13.61 | 3 | 2.50 | ||
| V+T | 4.20 | 1.34 | 105.88 | 8.84 | 0 | 0 | ||
| V+A+T | 3.93 | 0.93 | 118.90 | 13.09 | 2 | 1.67 | ||
| 高环 境负 荷 | 机械 输入 | V | 1.58 | 1.04 | 92.05 | 28.45 | 16 | 13.33 |
| V+A | 1.42 | 0.81 | 80.60 | 18.50 | 17 | 14.17 | ||
| V+T | 1.13 | 0.78 | 75.74 | 14.23 | 18 | 15.00 | ||
| V+A+T | 1.18 | 0.87 | 76.94 | 10.86 | 18 | 15.00 | ||
| 触屏 输入 | V | 2.35 | 1.32 | 89.36 | 15.18 | 6 | 5.00 | |
| V+A | 2.29 | 1.20 | 87.29 | 22.95 | 5 | 4.17 | ||
| V+T | 2.05 | 1.27 | 79.90 | 13.30 | 2 | 1.67 | ||
| V+A+T | 1.98 | 1.19 | 77.45 | 10.31 | 3 | 2.50 | ||
| 语音 输入 | V | 5.12 | 1.51 | 146.23 | 28.24 | 4 | 3.33 | |
| V+A | 4.74 | 1.23 | 123.57 | 17.82 | 3 | 2.5 | ||
| V+T | 4.29 | 0.97 | 123.33 | 12.16 | 1 | 0.83 | ||
| V+A+T | 5.97 | 1.38 | 163.92 | 24.22 | 0 | 0 | ||
表5 不同实验条件下的反应时间、任务完成时间 和操作错误率描述性统计结果
Table 5 Descriptive statistical results of reaction time,mission completion time and operation error rate under different experimental conditions
| 环境 负荷 | 输入 方式 | 输出 方式 | 反应时间/s | 任务完成时间/s | 操作错 误数 | 操作错 误率/% | ||
|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | |||||
| 低环 境负 荷 | 机械 输入 | V | 1.31 | 0.94 | 77.88 | 16.76 | 20 | 16.67 |
| V+A | 1.20 | 0.69 | 68.77 | 11.35 | 14 | 11.67 | ||
| V+T | 1.06 | 0.63 | 66.15 | 8.93 | 9 | 7.50 | ||
| V+A+T | 1.05 | 0.72 | 69.23 | 11.30 | 10 | 8.33 | ||
| 触屏 输入 | V | 2.01 | 0.89 | 75.18 | 10.74 | 1 | 0.83 | |
| V+A | 2.00 | 0.86 | 70.54 | 10.32 | 2 | 1.67 | ||
| V+T | 1.74 | 0.76 | 68.21 | 5.50 | 1 | 0.83 | ||
| V+A+T | 1.65 | 0.82 | 68.51 | 7.07 | 2 | 1.67 | ||
| 语音 输入 | V | 4.58 | 1.25 | 122.78 | 20.86 | 2 | 1.67 | |
| V+A | 4.22 | 1.09 | 112.23 | 13.61 | 3 | 2.50 | ||
| V+T | 4.20 | 1.34 | 105.88 | 8.84 | 0 | 0 | ||
| V+A+T | 3.93 | 0.93 | 118.90 | 13.09 | 2 | 1.67 | ||
| 高环 境负 荷 | 机械 输入 | V | 1.58 | 1.04 | 92.05 | 28.45 | 16 | 13.33 |
| V+A | 1.42 | 0.81 | 80.60 | 18.50 | 17 | 14.17 | ||
| V+T | 1.13 | 0.78 | 75.74 | 14.23 | 18 | 15.00 | ||
| V+A+T | 1.18 | 0.87 | 76.94 | 10.86 | 18 | 15.00 | ||
| 触屏 输入 | V | 2.35 | 1.32 | 89.36 | 15.18 | 6 | 5.00 | |
| V+A | 2.29 | 1.20 | 87.29 | 22.95 | 5 | 4.17 | ||
| V+T | 2.05 | 1.27 | 79.90 | 13.30 | 2 | 1.67 | ||
| V+A+T | 1.98 | 1.19 | 77.45 | 10.31 | 3 | 2.50 | ||
| 语音 输入 | V | 5.12 | 1.51 | 146.23 | 28.24 | 4 | 3.33 | |
| V+A | 4.74 | 1.23 | 123.57 | 17.82 | 3 | 2.5 | ||
| V+T | 4.29 | 0.97 | 123.33 | 12.16 | 1 | 0.83 | ||
| V+A+T | 5.97 | 1.38 | 163.92 | 24.22 | 0 | 0 | ||
| 自变量 | 反应时间 | 任务完成时间 | 操作错误数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f | F | p | 偏η2 | f | F | p | 偏η2 | f | F | p | 偏η2 | |
| 环境负荷 | 1 | 92.656 | <0.001** | 0.037 | 1 | 120.032 | <0.001** | 0.208 | 1 | 5.963 | 0.015 | 0.013 |
| 输入方式 | 2 | 2227.280 | <0.001** | 0.649 | 2 | 533.338 | <0.001** | 0.701 | 2 | 87.917 | <0.001** | 0.278 |
| 输出方式 | 3 | 14.673 | <0.001** | 0.018 | 3 | 17.621 | <0.001** | 0.104 | 3 | 2.211 | 0.086 | 0.014 |
| 环境负荷×输入方式 | 2 | 18.753 | <0.001** | 0.015 | 2 | 8.245 | <0.001** | 0.035 | 2 | 1.399 | 0.248 | 0.006 |
| 环境负荷×输出方式 | 3 | 10.494 | <0.001** | 0.013 | 3 | 1.529 | 0.206 | 0.010 | 3 | 0.357 | 0.784 | 0.002 |
| 输入方式×输出方式 | 6 | 7.723 | <0.001** | 0.019 | 6 | 8.685 | <0.001** | 0.103 | 6 | 0.215 | 0.972 | 0.003 |
| 环境负荷×输入方式×输出方式 | 6 | 11.285 | <0.001** | 0.027 | 6 | 3.801 | 0.001* | 0.048 | 6 | 1.878 | 0.083 | 0.024 |
表6 主体间效应结果
Table 6 Results of intersubjective effects
| 自变量 | 反应时间 | 任务完成时间 | 操作错误数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f | F | p | 偏η2 | f | F | p | 偏η2 | f | F | p | 偏η2 | |
| 环境负荷 | 1 | 92.656 | <0.001** | 0.037 | 1 | 120.032 | <0.001** | 0.208 | 1 | 5.963 | 0.015 | 0.013 |
| 输入方式 | 2 | 2227.280 | <0.001** | 0.649 | 2 | 533.338 | <0.001** | 0.701 | 2 | 87.917 | <0.001** | 0.278 |
| 输出方式 | 3 | 14.673 | <0.001** | 0.018 | 3 | 17.621 | <0.001** | 0.104 | 3 | 2.211 | 0.086 | 0.014 |
| 环境负荷×输入方式 | 2 | 18.753 | <0.001** | 0.015 | 2 | 8.245 | <0.001** | 0.035 | 2 | 1.399 | 0.248 | 0.006 |
| 环境负荷×输出方式 | 3 | 10.494 | <0.001** | 0.013 | 3 | 1.529 | 0.206 | 0.010 | 3 | 0.357 | 0.784 | 0.002 |
| 输入方式×输出方式 | 6 | 7.723 | <0.001** | 0.019 | 6 | 8.685 | <0.001** | 0.103 | 6 | 0.215 | 0.972 | 0.003 |
| 环境负荷×输入方式×输出方式 | 6 | 11.285 | <0.001** | 0.027 | 6 | 3.801 | 0.001* | 0.048 | 6 | 1.878 | 0.083 | 0.024 |

图6 不同输入方式下的反应时间
Fig.6 Reaction times under different input modes

图7 不同输入方式下的任务完成时间
Fig.7 Mission completion times under different input methods
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | -1.135 | 0.526 |
| 语音输入 | -51.184* | <0.001 | |
| 触屏输入 | 机械输入 | 1.135 | 0.526 |
| 语音输入 | -50.048* | <0.001 | |
| 语音输入 | 机械输入 | 51.184* | <0.001 |
| 触屏输入 | 50.048* | <0.001 |
表7 不同输入方式下装甲车辆乘员任务 完成时间的多重比较
Table 7 Multiple comparison of mission completion times of armored vehicle occupant under different input modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | -1.135 | 0.526 |
| 语音输入 | -51.184* | <0.001 | |
| 触屏输入 | 机械输入 | 1.135 | 0.526 |
| 语音输入 | -50.048* | <0.001 | |
| 语音输入 | 机械输入 | 51.184* | <0.001 |
| 触屏输入 | 50.048* | <0.001 |
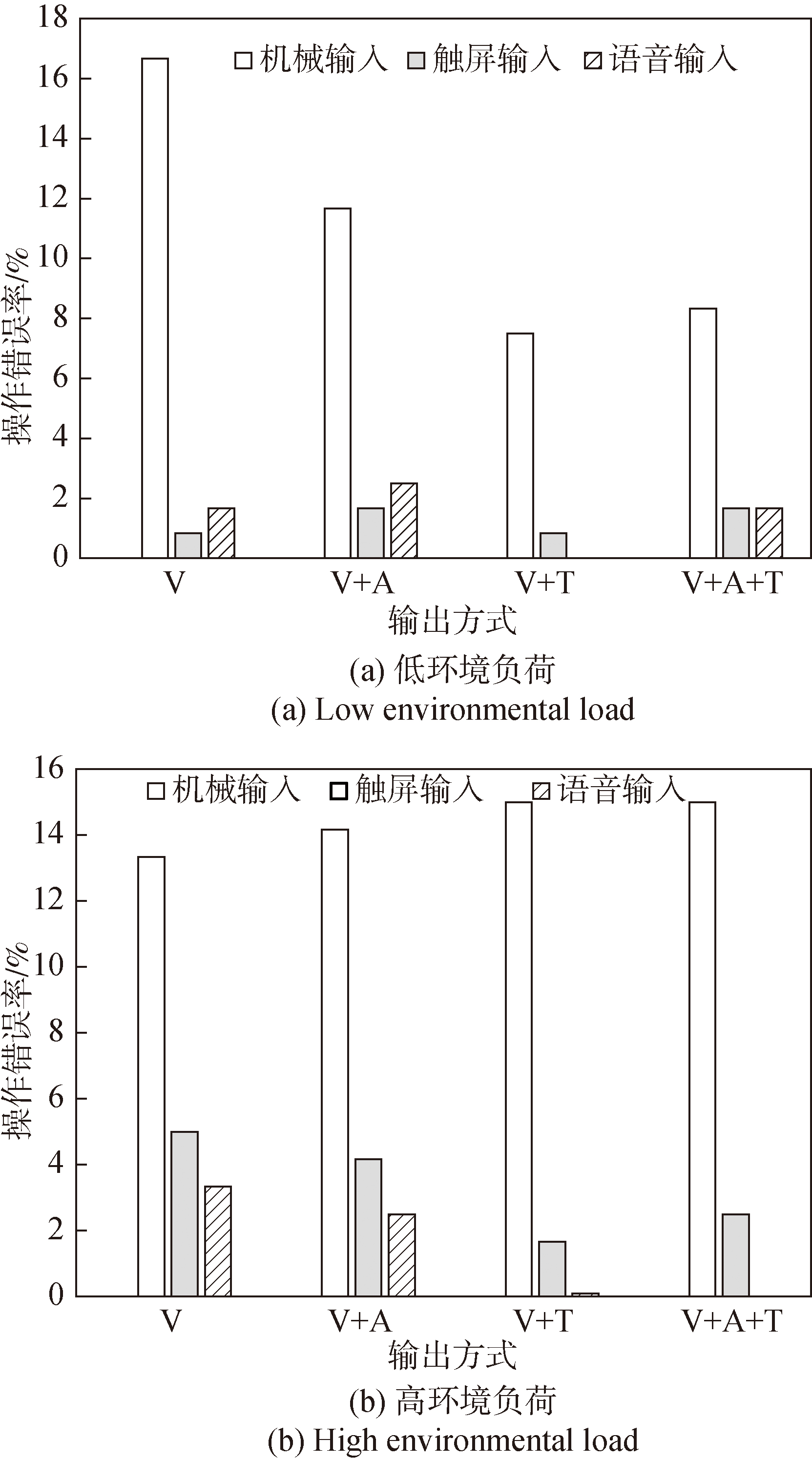
图8 不同输入方式下的操作错误率
Fig.8 Operation error rates under different input modes
| 参考项 | 比较项 | 操作错误数平均值差值 | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | 0.62* | <0.001 |
| 语音输入 | 0.67* | <0.001 | |
| 触屏输入 | 机械输入 | -0.62* | <0.001 |
| 语音输入 | 0.04 | 0.439 | |
| 语音输入 | 机械输入 | -0.67* | <0.001 |
| 触屏输入 | -0.04 | 0.439 |
表8 不同输入方式下装甲车辆乘员操作错误数的多重比较
Table 8 Multiple comparison of the number of operating errors of armored vehicle occupant under different input modes
| 参考项 | 比较项 | 操作错误数平均值差值 | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | 0.62* | <0.001 |
| 语音输入 | 0.67* | <0.001 | |
| 触屏输入 | 机械输入 | -0.62* | <0.001 |
| 语音输入 | 0.04 | 0.439 | |
| 语音输入 | 机械输入 | -0.67* | <0.001 |
| 触屏输入 | -0.04 | 0.439 |

图9 不同输出方式下的反应时间
Fig.9 Reaction times under different output modes
| 参考项 | 比较项 | 反应时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 0.116 | 0.062 |
| V+T | 0.409* | <0.001 | |
| V+A+T | 0.199** | 0.001 | |
| V+A | V | -0.116 | 0.062 |
| V+T | 0.293* | <0.001 | |
| V+A+T | 0.083 | 0.181 | |
| V+T | V | -0.409* | <0.001 |
| V+A | -0.293* | <0.001 | |
| V+A+T | -0.210** | 0.001 | |
| V+A+T | V | -0.199** | 0.001 |
| V+A | -0.083 | 0.181 | |
| V+T | 0.210** | 0.001 |
表9 不同输出方式下装甲车辆乘员反应时间的多重比较
Table 9 Multiple comparison of reaction times of armored vehicle occupant under different output modes
| 参考项 | 比较项 | 反应时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 0.116 | 0.062 |
| V+T | 0.409* | <0.001 | |
| V+A+T | 0.199** | 0.001 | |
| V+A | V | -0.116 | 0.062 |
| V+T | 0.293* | <0.001 | |
| V+A+T | 0.083 | 0.181 | |
| V+T | V | -0.409* | <0.001 |
| V+A | -0.293* | <0.001 | |
| V+A+T | -0.210** | 0.001 | |
| V+A+T | V | -0.199** | 0.001 |
| V+A | -0.083 | 0.181 | |
| V+T | 0.210** | 0.001 |
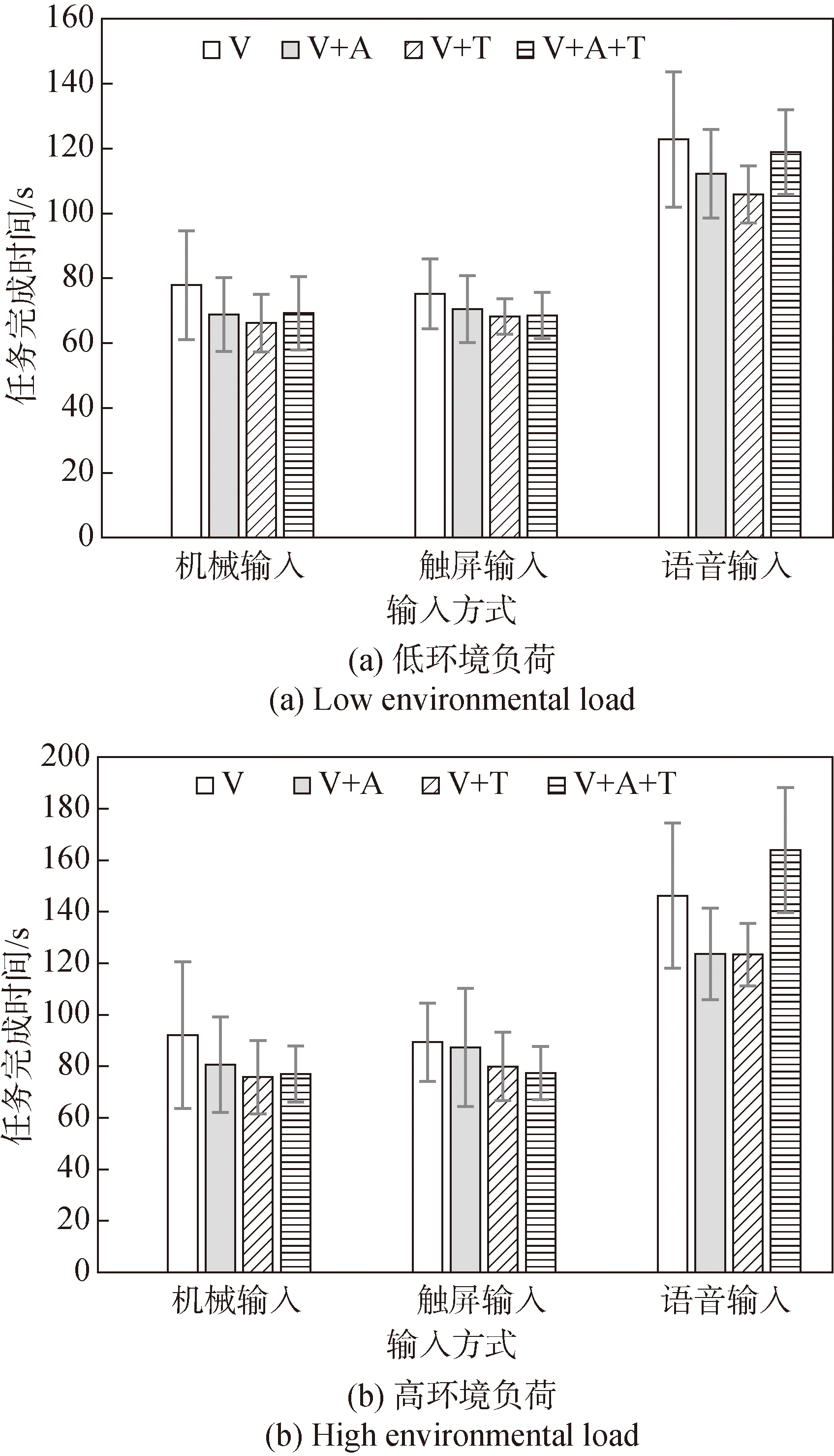
图10 不同输出方式下的任务完成时间
Fig.10 Mission completion times under different output modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 10.08* | 0.011 |
| V+T | 14.04** | <0.001 | |
| V+A+T | 4.75 | 0.230 | |
| V+A | V | -10.08* | 0.011 |
| V+T | 3.96 | 0.316 | |
| V+A+T | -5.33 | 0.178 | |
| V+T | V | -14.0 | <0.001 |
| V+A | -3.96 | 0.316 | |
| V+A+T | -9.29* | 0.019 | |
| V+A+T | V | -4.75 | 0.230 |
| V+A | 5.32 | 0.178 | |
| V+T | 9.29* | 0.019 |
表10 不同输出方式下装甲车辆乘员任务完成时间的多重比较
Table 10 Multiple comparison of mission ompletion times of armored vehicle occupant under different output modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 10.08* | 0.011 |
| V+T | 14.04** | <0.001 | |
| V+A+T | 4.75 | 0.230 | |
| V+A | V | -10.08* | 0.011 |
| V+T | 3.96 | 0.316 | |
| V+A+T | -5.33 | 0.178 | |
| V+T | V | -14.0 | <0.001 |
| V+A | -3.96 | 0.316 | |
| V+A+T | -9.29* | 0.019 | |
| V+A+T | V | -4.75 | 0.230 |
| V+A | 5.32 | 0.178 | |
| V+T | 9.29* | 0.019 |

图11 不同环境负荷下的反应时间
Fig.11 Reaction times under different environmental loads
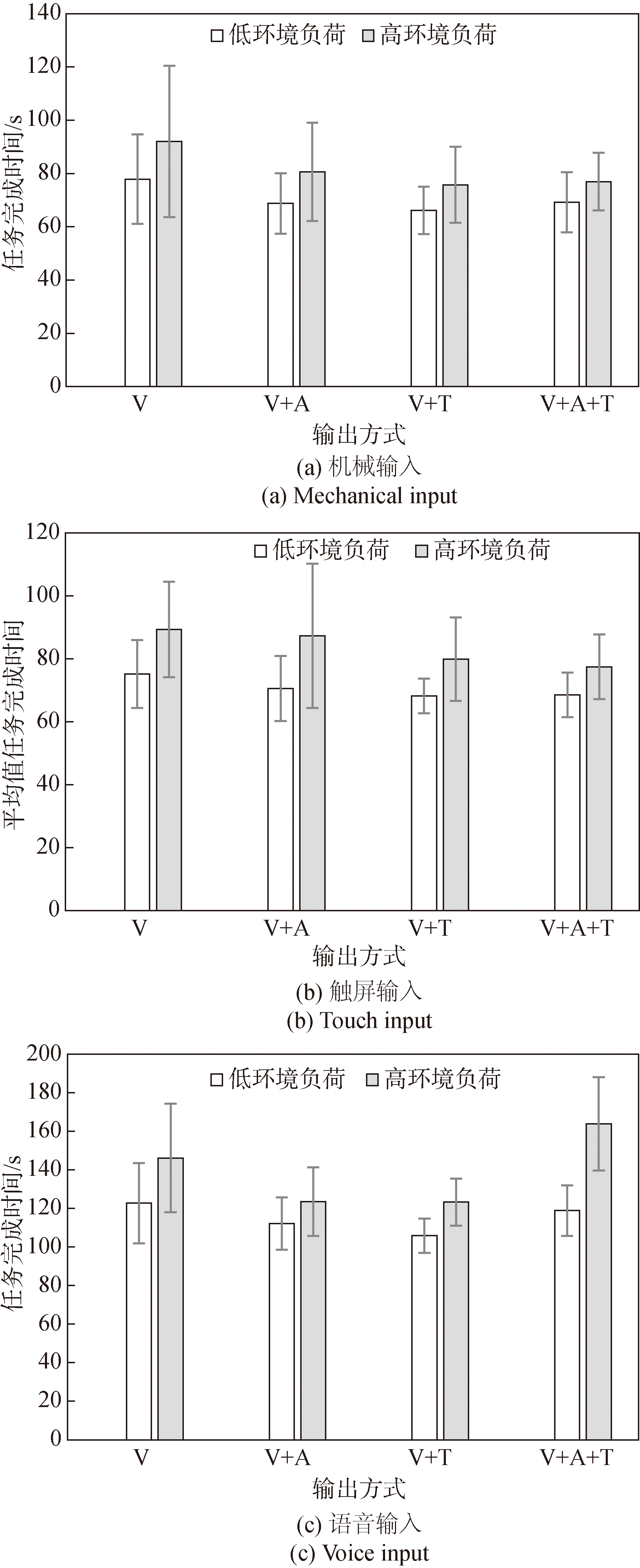
图12 不同环境负荷下的任务完成时间
Fig.12 Mission completion times under different environmental loads
| 输入方式 | 输出方式 | 反应时间/s | 任务完成时间/s | ||
|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 机械输入 | V | 1.45 | 1.00 | 84.96 | 24.14 |
| V+A | 1.30 | 0.76 | 74.69 | 16.29 | |
| V+T | 1.10 | 0.71 | 70.95 | 12.70 | |
| V+A+T | 1.11 | 0.79 | 73.09 | 11.61 | |
| 触屏输入 | V | 2.19 | 1.15 | 82.27 | 14.83 |
| V+A | 2.15 | 1.06 | 78.92 | 19.50 | |
| V+T | 1.90 | 1.06 | 74.06 | 11.66 | |
| V+A+T | 1.82 | 1.04 | 72.98 | 9.83 | |
| 语音输入 | V | 4.85 | 1.41 | 134.50 | 27.23 |
| V+A | 4.48 | 1.19 | 117.90 | 16.67 | |
| V+T | 4.25 | 1.17 | 114.61 | 13.72 | |
| V+A+T | 4.91 | 1.55 | 141.41 | 29.82 | |
表11 输入方式和输出方式交互作用下的反应时间、任务完成时间描述性统计结果(平均值±标准差)
Table 11 Descriptive statistical results of reaction time and mission completion time under the interaction of input mode and output mode (mean±standard deviation)
| 输入方式 | 输出方式 | 反应时间/s | 任务完成时间/s | ||
|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 机械输入 | V | 1.45 | 1.00 | 84.96 | 24.14 |
| V+A | 1.30 | 0.76 | 74.69 | 16.29 | |
| V+T | 1.10 | 0.71 | 70.95 | 12.70 | |
| V+A+T | 1.11 | 0.79 | 73.09 | 11.61 | |
| 触屏输入 | V | 2.19 | 1.15 | 82.27 | 14.83 |
| V+A | 2.15 | 1.06 | 78.92 | 19.50 | |
| V+T | 1.90 | 1.06 | 74.06 | 11.66 | |
| V+A+T | 1.82 | 1.04 | 72.98 | 9.83 | |
| 语音输入 | V | 4.85 | 1.41 | 134.50 | 27.23 |
| V+A | 4.48 | 1.19 | 117.90 | 16.67 | |
| V+T | 4.25 | 1.17 | 114.61 | 13.72 | |
| V+A+T | 4.91 | 1.55 | 141.41 | 29.82 | |
| [1] |
陈挚. 目标的识别与快速准确攻击一体化设计研究[D]. 南京: 南京航空航天大学, 2011.
|
|
|
|
| [2] |
曹灵芝, 殷复鹏. 人因工程在汽车产品中的应用调查与分析[C]// 中国人类工效学学会成立20周年庆祝大会论文集. 北京: 中国人类工效学学会,2009:409-413.
|
|
|
|
| [3] |
张文镝, 周诗婕, 金海亮, 等. 自动驾驶系统中人机协同的认知决策一体化机制研究[J]. 汽车文摘, 2023(9):11-18.
|
|
|
|
| [4] |
|
| [5] |
钱晓松, 杨新, 张帆. 面向特种车辆的触屏交互系统设计研究[J]. 装饰, 2018(3):82-85.
|
|
|
|
| [6] |
杨洋. 基于语音交互的手持移动端多通道交互研究[D]. 北京: 北京邮电大学, 2018.
|
|
|
|
| [7] |
范雪乔. 基于手势识别VR系统的交互体验评价研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
|
|
|
|
| [8] |
刘洋. 智能音箱语音交互设计中的可用性研究[D]. 北京: 中国矿业大学, 2022.
|
|
|
|
| [9] |
高岚岚, 纪坤, 乐剑. 眼动交互在点击任务中的应用研究[J]. 舰船电子工程, 2023, 43(5):63-63,81.
|
|
|
|
| [10] |
徐源. 眼控—手控双通道交互方式的工效学研究[D]. 杭州: 浙江理工大学, 2017.
|
|
|
|
| [11] |
孙晓东, 金晓萍, 解芳, 等. 多模态告警和认知负荷对装甲车辆乘员反应的影响[J]. 兵工学报, 2023, 44(4):972-981.
|
|
|
|
| [12] |
pmid: 23397817 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
张子健. 人机共驾模式下多模态刺激对驾驶员情景意识唤醒及接管评价研究[D]. 重庆: 重庆大学, 2019.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
李家文, 成波. 驾驶员疲劳状态适应式复合预警方法的研究[J]. 汽车工程, 2012(3):211-216.
|
|
|
|
| [20] |
陈慧娟. 飞机驾驶舱多通道人机交互设计研究[D]. 南京: 东南大学, 2016.
|
|
|
|
| [21] |
高莹. 基于环境心理学的老年人疗养中心设计方法的研究[D]. 西安: 长安大学, 2015.
|
|
|
|
| [22] |
石程. 基于环境—行为关系理论的老年公寓空间环境设计研究[D]. 兰州: 兰州理工大学, 2018.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
张永超. 高铁客站候车区热、光、声环境对人体舒适度的交互作用影响研究[D]. 北京: 北京交通大学, 2021.
|
|
|
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
国家质量监督检验检疫总局.声环境质量标准:GB 3096—2008 [S]. 北京: 中国环境科学出版社, 2008.
|
|
General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China.Environmental quality standard for noise:GB 3096—2008 [S]. Beijing: China Environmental Science Press, 2008. (in Chinese)
|
|
| [36] |
国家市场监督管理总局.视觉工效学原则.室内工作场所照明:GB/T 13379-2023[S]. 北京: 中国标准出版社, 2023.
|
|
State Administration for Market Regulation.Principles of visual ergonomics-the lighting of indoor work places:GB/T 13379—2023[S]. Beijing: China standard press, 2023. (in Chinese).
|
|
| [37] |
高祖新, 言方荣. 概率论与数理统计[M]. 第2版.: 南京:南京大学出版社, 2020. GAO Z X,YAN F R.Probability and statistics[M]. 2 ed. Nanjing: Nanjing University Press,2020. (in Chinese)
|
| [38] |
黄捷. 人机交互在震动环境下的仿真模型设计与实验测试[C]// 第四届和谐人机环境联合学术会议论文集. 昆明: 中国计算机学会,2008:1-7.
|
|
|
|
| [39] |
毛信良, 周田伟, 陈二喜. 一种用于多点触摸终端的触摸控制方法与设备:CN104076986B[P].2015-12-09.
|
|
|
| [1] | 熊瑛, 李小健, 范知友, 李楠, 王彪, 王天楠. 装甲车辆大功率电驱动系统传导干扰预测模型构建方法[J]. 兵工学报, 2024, 45(9): 3004-3016. |
| [2] | 杜甫, 董明明, 汪浒江, 赵艳辉, 郑凤杰. 基于准零刚度的坦克装甲车辆半主动惯容悬架控制策略[J]. 兵工学报, 2024, 45(9): 2929-2935. |
| [3] | 岳文斌, 宁功韬, 倪永亮, 宋克岭, 黄煜, 王志远, 李艳明. 坦克装甲车辆电力系统源网荷储协同优化与安全控制:架构设计及前沿思考[J]. 兵工学报, 2024, 45(8): 2463-2477. |
| [4] | 陈刚, 王国新, 明振军, 陈旺, 商曦文, 阎艳. 基于DBSCAN聚类和LSTM网络的装甲车辆集群轨迹预测方法[J]. 兵工学报, 2024, 45(12): 4295-4310. |
| [5] | 刘涛, 张宏伟, 孙晓旺, 王显会, 张进成, 胡杨. 车辆载人空降的试验与仿真研究[J]. 兵工学报, 2023, 44(8): 2283-2298. |
| [6] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [7] | 孙晓东, 金晓萍, 解芳, 孙厚杰, 郑思涓. 多模态告警和认知负荷对装甲车辆乘员反应的影响[J]. 兵工学报, 2023, 44(4): 972-981. |
| [8] | 高普, 李宏才, 刘辉, 孟杰克. 装甲车辆综合传动装置外接油管系统动态特性分析[J]. 兵工学报, 2023, 44(11): 3447-3454. |
| [9] | 张瑞增, 龚建伟, 陈慧岩, 刘海鸥, 卢佳兴. 硬质路面条件下履带车辆转向模型分析及验证[J]. 兵工学报, 2023, 44(1): 233-246. |
| [10] | 杜志岐, 唐镜. 基于系统工程的装甲车辆总体设计[J]. 兵工学报, 2022, 43(S1): 1-10. |
| [11] | 熊瑛, 李小健, 周伟, 李楠, 焦美, 李燕, 杜晓琳, 聂秀丽, 纪相普. 装甲车辆三相同步电机宽频电磁兼容模型构建方法[J]. 兵工学报, 2022, 43(7): 1467-1477. |
| [12] | 孙厚杰, 金晓萍, 解芳, 孙晓东, 郑思涓. 长时工作记忆和注意力分配对装甲车辆乘员情景意识的影响[J]. 兵工学报, 2022, 43(11): 2749-2760. |
| [13] | 郭司南, 完颜笑如, 刘双, 梁超然, 陈浩. 智能化设计与信息加工通道复杂度对装甲车乘员脑力负荷的影响[J]. 兵工学报, 2021, 42(2): 234-241. |
| [14] | 廖自力, 疏歆, 高强, 李嘉麒. 电传动装甲车辆母线电压双通道补偿控制[J]. 兵工学报, 2021, 42(10): 2082-2091. |
| [15] | 刘春光, 陈路明, 张运银, 张征, 徐浩轩. 基于改进灰色马尔可夫链的电传动装甲车辆负载需求功率预测[J]. 兵工学报, 2021, 42(10): 2130-2144. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4