
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240350-.doi: 10.12382/bgxb.2024.0350
苏家豪1, 刘思宇1, 卢春雷1, 郭朝1,*( ), 王志瑞2,3, 闫曈2,3, 党睿娜2,3, 苏波2,3
), 王志瑞2,3, 闫曈2,3, 党睿娜2,3, 苏波2,3
收稿日期:2024-05-08
上线日期:2025-04-30
通讯作者:
基金资助:
SU Jiahao1, LIU Siyu1, LU Chunlei1, GUO Zhao1,*(), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3, SU Bo2,3
Received:2024-05-08
Online:2025-04-30
摘要:
为提高四足机器人的运动步幅和在运动中的抗冲击性能,以猎豹为仿生对象进行运动机理分析,设计一种具有串联弹性驱动器(Series Elastic Actuator,SEA)的离散式仿生脊柱关节。采用SEA为驱动单元,布置在脊柱箱体与腿足关节之间,模拟生物肌肉特性提供被动柔顺性。脊柱整体设计采用2自由度离散式构型,实现伸展和蜷曲两种奔跑姿态,提高运动步幅。基于D-H参数法,建立了2自由度离散式脊柱四足机器人的运动学模型,并对四足机器人的运动步幅进行了对比分析。搭建四足机器人实验平台,开展性能测试实验。在bound步态下的实验结果表明:在步幅测试实验中,含脊柱的四足机器人运动步幅提高了73.72%;对比刚性躯干,在跳跃过程中可以减少前腿大腿电机峰值力矩35.2%、前腿小腿峰值力矩12.0%、后腿大腿峰值力矩45.7%以及后腿小腿峰值力矩10.3%,且各关节电机输出力矩的均值、标准差均明显降低。
中图分类号:
苏家豪, 刘思宇, 卢春雷, 郭朝, 王志瑞, 闫曈, 党睿娜, 苏波. 用于四足机器人的离散式串联弹性脊柱关节设计[J]. 兵工学报, 2025, 46(4): 240350-.
SU Jiahao, LIU Siyu, LU Chunlei, GUO Zhao, WANG Zhirui, YAN Tong, DANG Ruina, SU Bo. Design of a Discrete Series Elastic Actuated Spine for Quadruped Robots[J]. Acta Armamentarii, 2025, 46(4): 240350-.
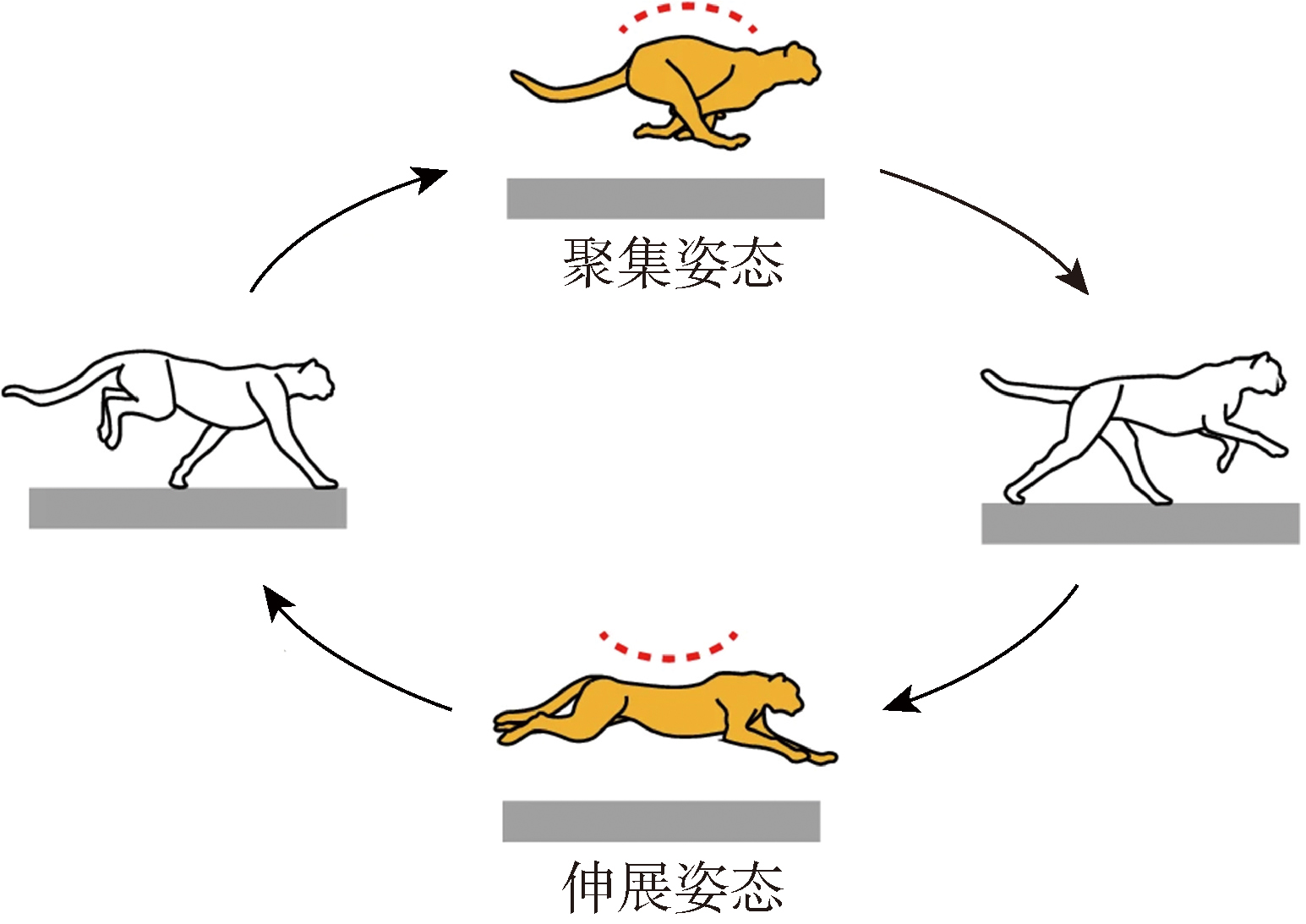
图1 猎豹奔跑过程中的疾驰步态
Fig.1 Two gaits of a cheetah during running

图2 脊柱整体结构设计
Fig.2 Overall structural design of spine
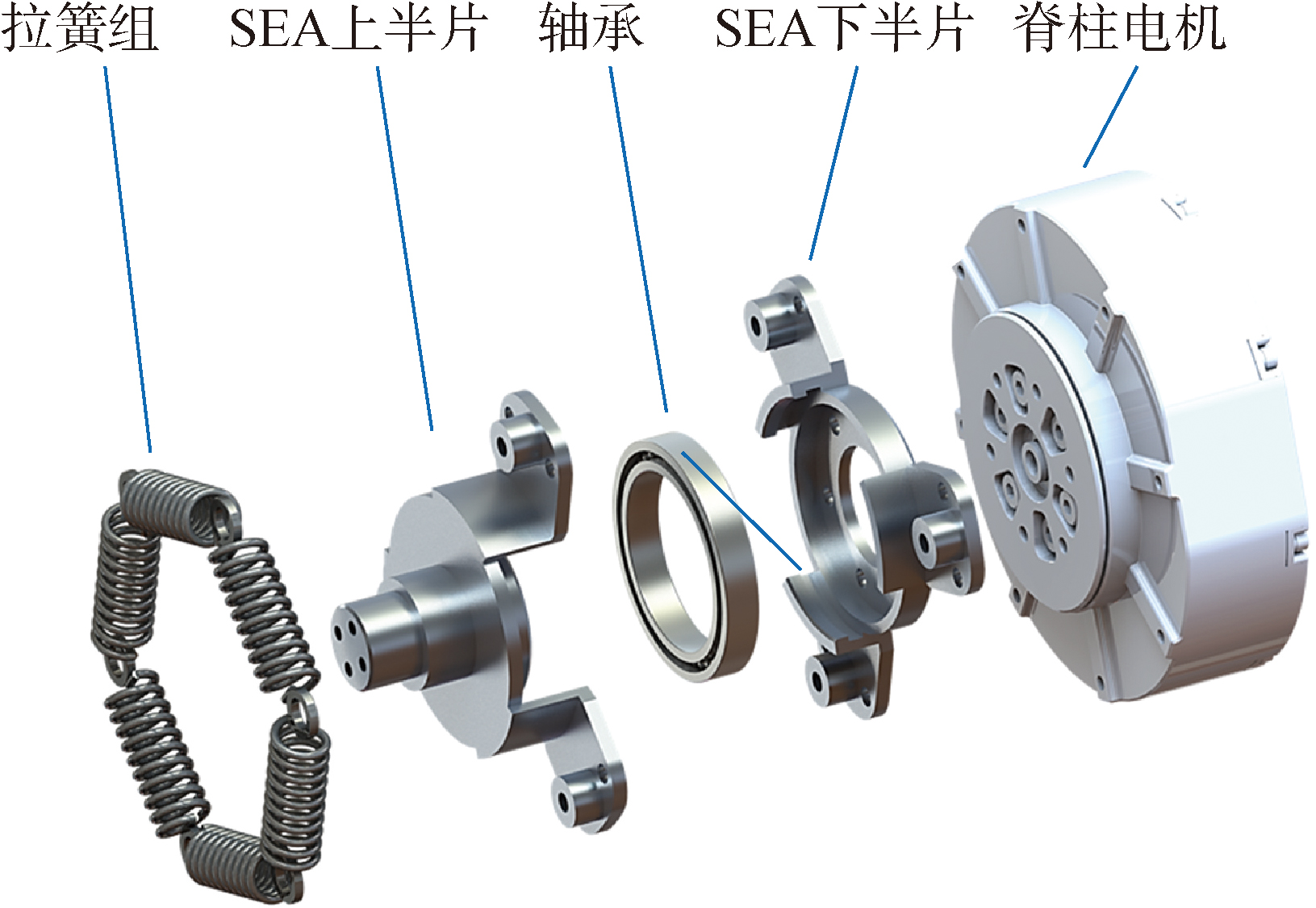
图3 SEA结构
Fig.3 SEA structure

图4 SEA安装示意图
Fig.4 Installation diagram of SEA

图5 实验整体样机
Fig.5 Experimental overall prototype

图6 SEA压缩过程
Fig.6 Compression process of SEA

图7 SEA原理示意图
Fig.7 Schematic diagram of SEA

图8 单腿运动学坐标系建立
Fig.8 Establishment of single-leg kinematic coordinate system
| i | θi/(°) | di/mm | αi/(°) | ∂i/mm |
|---|---|---|---|---|
| 1 | d0 | ∂1 | ||
| 1' | θ1+90 | 90 | ||
| 2 | d1 | |||
| 3 | θ2 | d2 | -90 | |
| 4 | θ3 | d3 | ∂3 | |
| 5 | θ4-90 | ∂4 |
表1 单腿D-H参数
Table 1 Single leg D-H parameters
| i | θi/(°) | di/mm | αi/(°) | ∂i/mm |
|---|---|---|---|---|
| 1 | d0 | ∂1 | ||
| 1' | θ1+90 | 90 | ||
| 2 | d1 | |||
| 3 | θ2 | d2 | -90 | |
| 4 | θ3 | d3 | ∂3 | |
| 5 | θ4-90 | ∂4 |
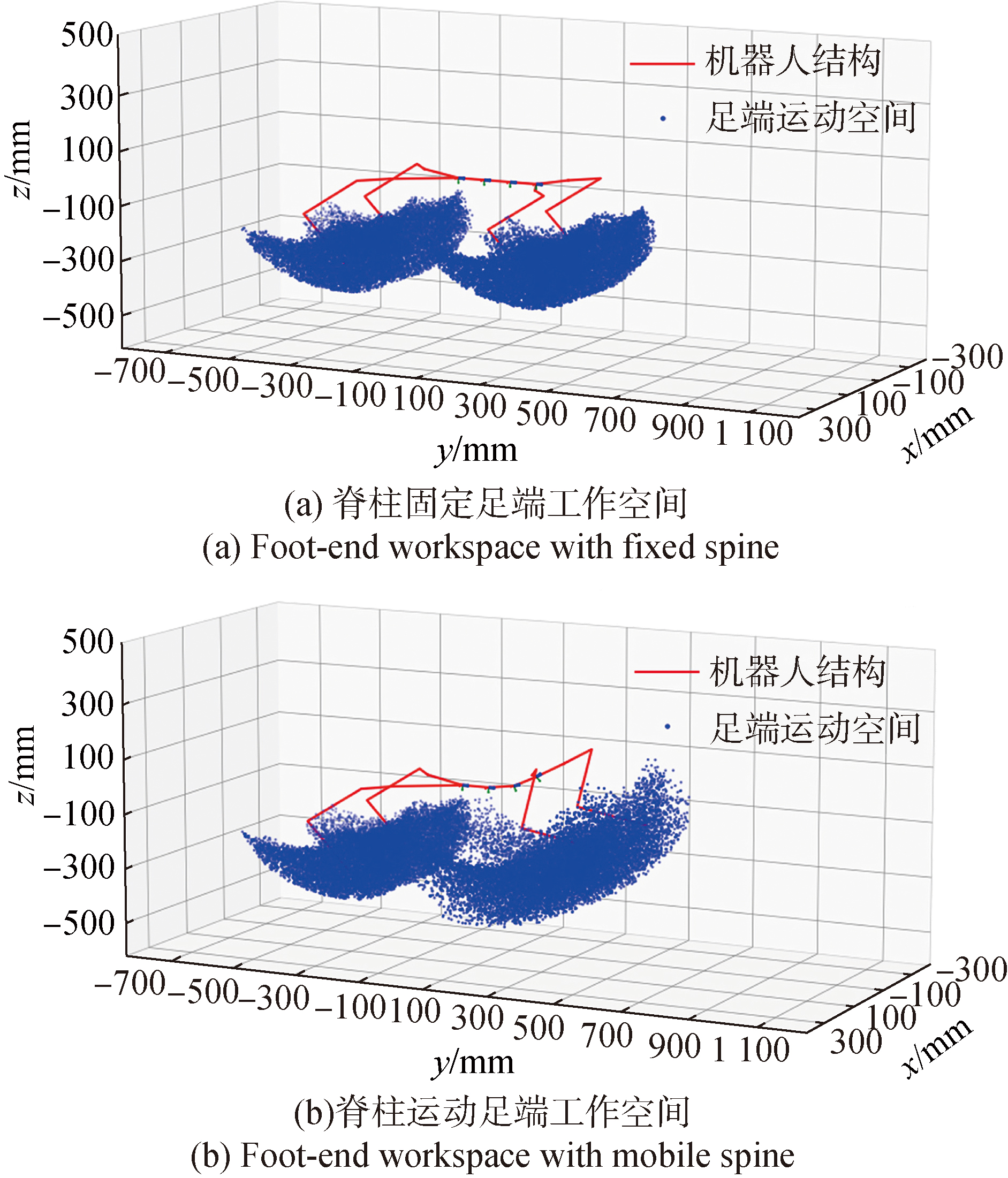
图9 有无脊柱足端工作空间对比
Fig.9 Comparison of foot-end workspaces with and without spine
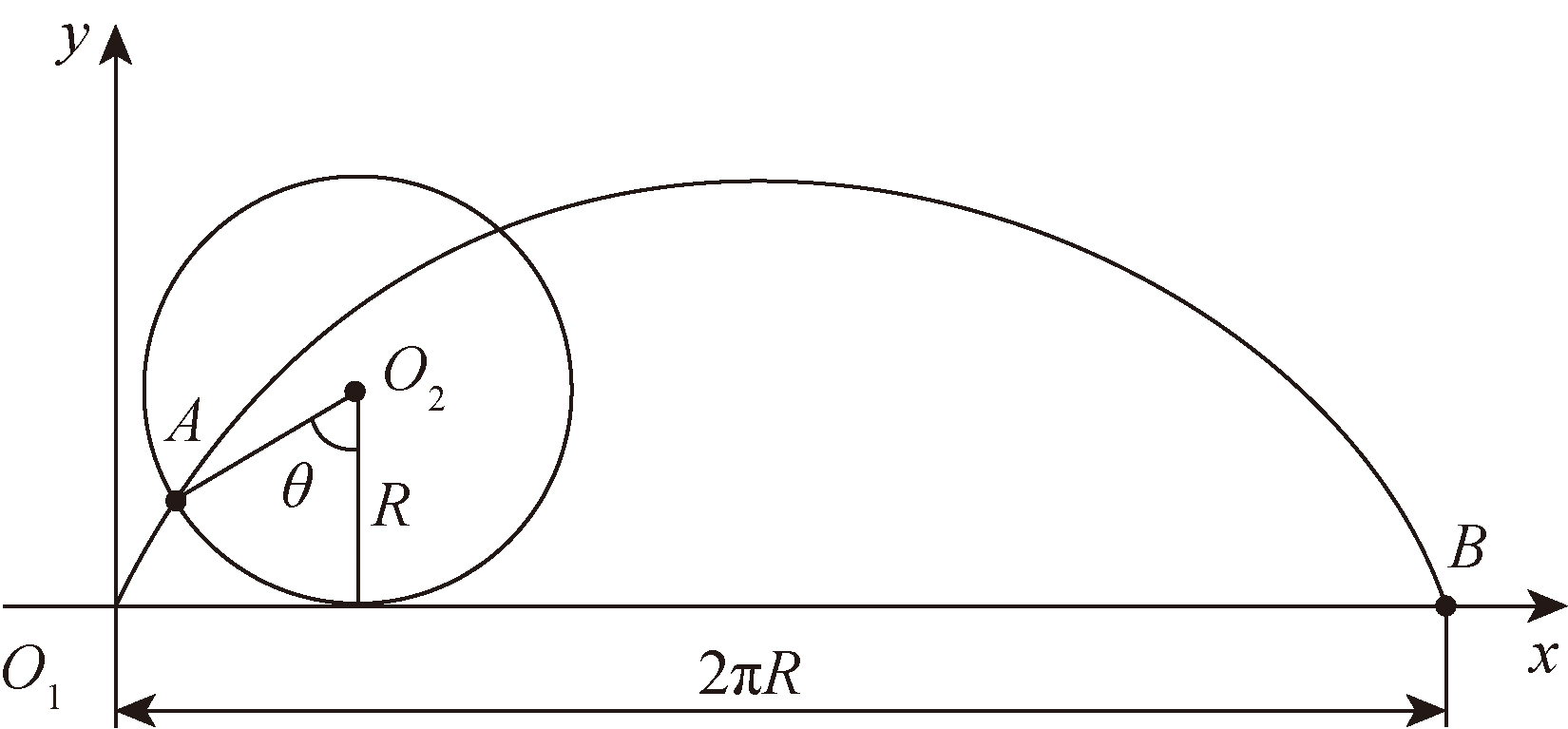
图10 摆线轨迹
Fig.10 Cycloid trajectory
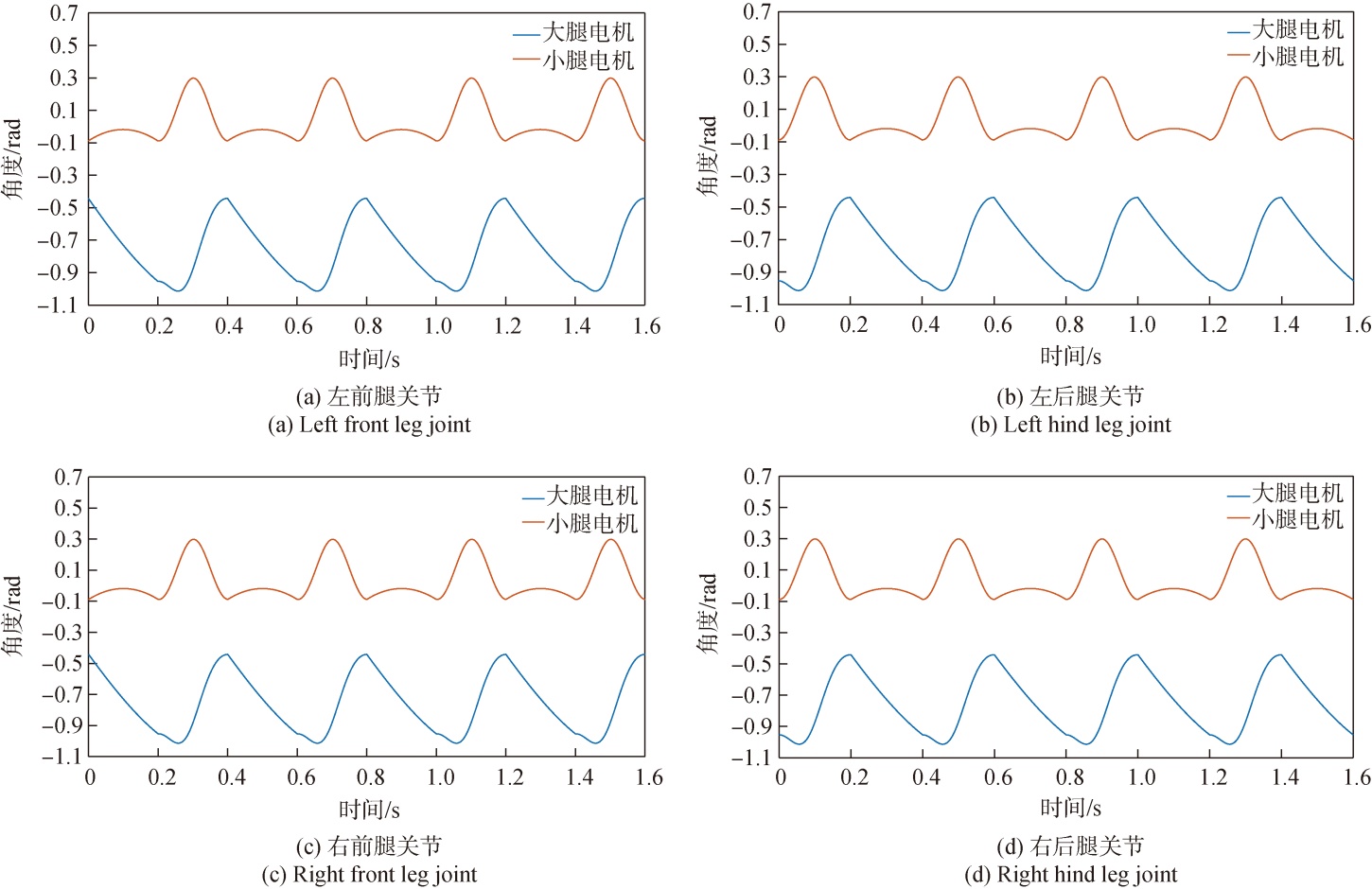
图11 bound步态下腿部关节运动轨迹
Fig.11 Motion trajectories of leg joints under bound gait

图12 猎豹奔跑步态
Fig.12 Motion trajectories of leg joints under running gait

图13 有无脊柱步幅对比
Fig.13 Comparison of stride lengths with and without spine

图14 等效刚度测试平台
Fig.14 Equivalent stiffness test platform
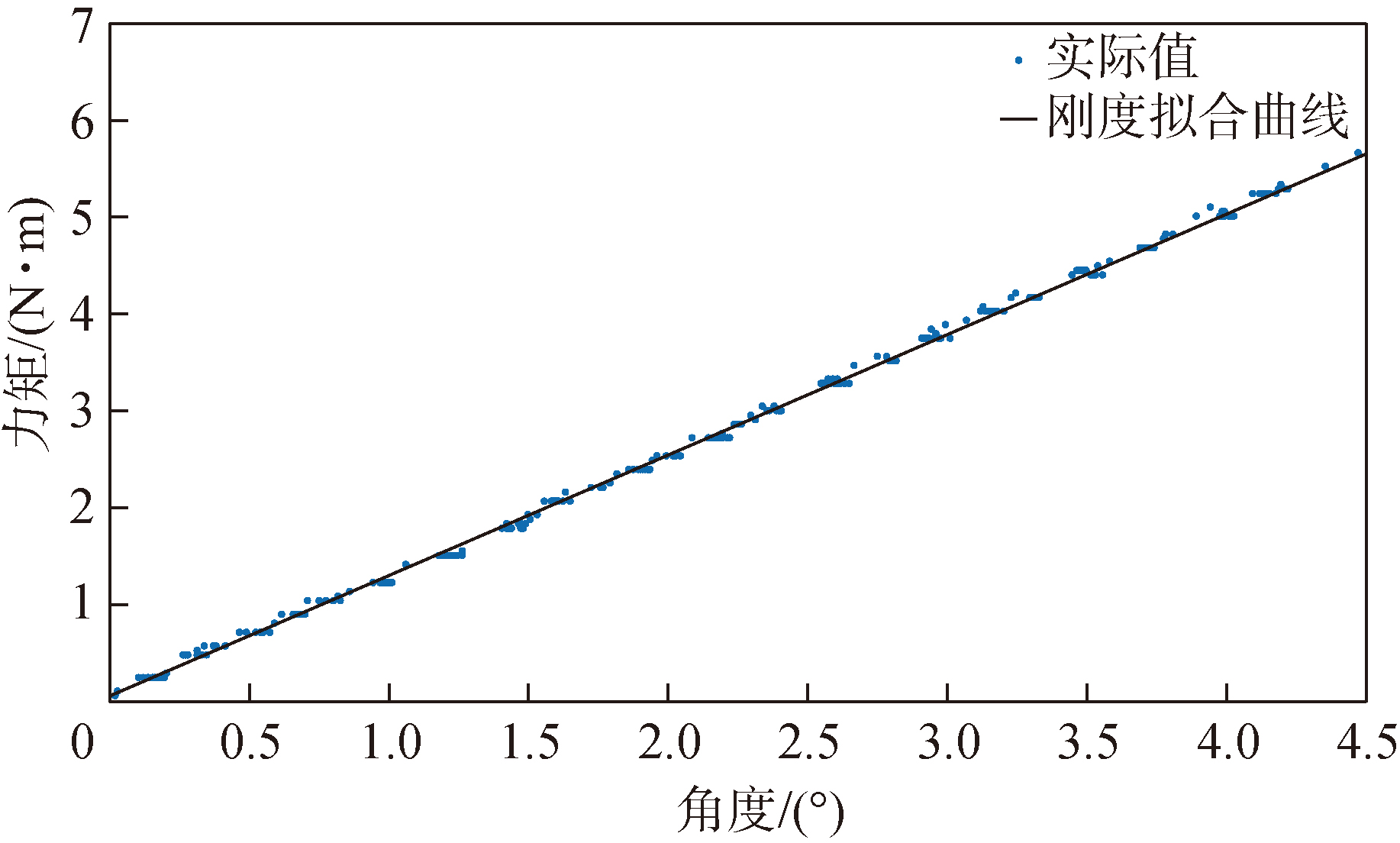
图15 等效刚度
Fig.15 Equivalent stiffness curve

图16 频率响应实验
Fig.16 Frequency response experiment

图17 冲击测试实验平台
Fig.17 Impact test experimental platform
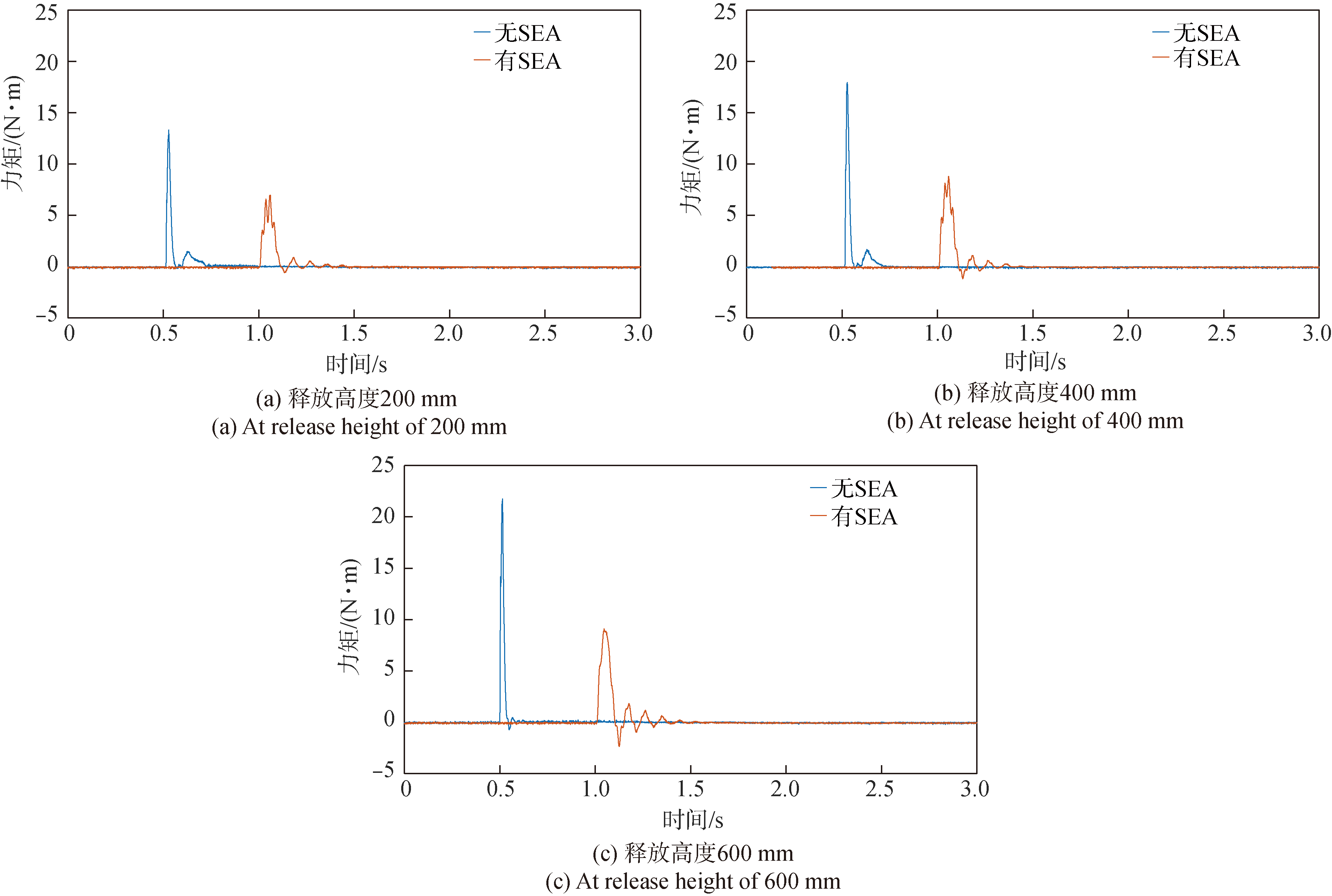
图18 不同冲击下的电机力矩对比
Fig.18 Motor torques under different impacts
| 下落高度mm | 有SEA峰值力矩/ (N·m) | 无SEA峰值 力矩/(N·m) | 减少百分比/% |
|---|---|---|---|
| 200 | 6.97 | 13.30 | 47.6% |
| 400 | 8.78 | 17.93 | 51.0% |
| 600 | 9.10 | 21.76 | 58.2% |
表2 有SEA和无SEA下的峰值力矩实验
Table 2 Experiments of torque buffering with SEA and without SEA in terms of peak torque
| 下落高度mm | 有SEA峰值力矩/ (N·m) | 无SEA峰值 力矩/(N·m) | 减少百分比/% |
|---|---|---|---|
| 200 | 6.97 | 13.30 | 47.6% |
| 400 | 8.78 | 17.93 | 51.0% |
| 600 | 9.10 | 21.76 | 58.2% |

图19 样机步幅测试平台
Fig.19 Prototype stride test platform

图20 bound步态步幅对比
Fig.20 Stride length comparison of bound gait

图21 跳跃缓冲实验
Fig.21 Jump buffer experiment

图22 各电机位置与力矩对比
Fig.22 Comparison of position and torque of each motor
| 电机 | 有SEA脊柱 | 无SEA脊柱 | 有SEA脊柱峰值力矩减少百分比/% | |||||
|---|---|---|---|---|---|---|---|---|
| 峰值 | 标准差 | 峰值 | 标准差 | |||||
| 前腿大腿 | 3.70 | -3.42 | 1.09 | 5.71 | -2.80 | 1.60 | 35.2 | |
| 前腿小腿 | 0.52 | -16.94 | 2.41 | 2.23 | -19.23 | 3.31 | 12.0 | |
| 后腿大腿 | 0.37 | -6.64 | 1.18 | 1.32 | -12.23 | 1.81 | 45.7 | |
| 后腿小腿 | 0.54 | -15.80 | 2.88 | 1.11 | -17.61 | 3.15 | 10.3 | |
| 脊柱 | 1.36 | -3.51 | 1.02 | |||||
表3 有、无SEA脊柱时各电机力矩数据对比
Table 3 Comparison of motor torque data with and without SEA spine N·m
| 电机 | 有SEA脊柱 | 无SEA脊柱 | 有SEA脊柱峰值力矩减少百分比/% | |||||
|---|---|---|---|---|---|---|---|---|
| 峰值 | 标准差 | 峰值 | 标准差 | |||||
| 前腿大腿 | 3.70 | -3.42 | 1.09 | 5.71 | -2.80 | 1.60 | 35.2 | |
| 前腿小腿 | 0.52 | -16.94 | 2.41 | 2.23 | -19.23 | 3.31 | 12.0 | |
| 后腿大腿 | 0.37 | -6.64 | 1.18 | 1.32 | -12.23 | 1.81 | 45.7 | |
| 后腿小腿 | 0.54 | -15.80 | 2.88 | 1.11 | -17.61 | 3.15 | 10.3 | |
| 脊柱 | 1.36 | -3.51 | 1.02 | |||||
| [1] |
|
| [2] |
|
| [3] |
荣学文. SCalf 液压驱动四足机器人的机构设计与运动分析[D]. 济南: 山东大学, 2013.
|
|
|
|
| [4] |
柴汇, 孟健, 荣学文, 等. 高性能液压驱动四足机器人 SCalf 的设计与实现[J]. 机器人, 2014, 36(4):385-391.
|
|
|
|
| [5] |
Unitree Aliengo[EB/OL]. 杭州: 杭州宇树科技有限公司, 2019 (2019-05-20) [2024-10-21]. https://www.unitree.com/cn/aliengo.
|
|
Unitree Aliengo[EB/OL]. Hangzhou: Hangzhou Yushu Technology CO., LTD., 2019 (2019-05-20) [2024-10-21]. https://www.unitree.com/cn/aliengo. in Chinese)
|
|
| [6] |
绝影 X30[EB/OL]. 杭州: 杭州云深处科技有限公司, 2023 (2023-10-09) [2024-10-21]. https://www.deeprobotics.cn/robot/index/product3.html.
|
|
Jueying X30[EB/OL]. Hangzhou: Hangzhou Yunshenchu Technology Co., Ltd., 2023 (2023-10-09) [2024-10-21]. https://www.deeprobotics.cn/robot/index/product3.html. in Chinese)
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
张秀丽, 谭小康, 吴海波. 可变刚度的四足机器人被动柔顺脊柱设计与应用[J]. 北京交通大学学报, 2018, 42(6):111-118.
doi: 10.11860/j.issn.1673-0291.2018.06.016 |
|
doi: 10.11860/j.issn.1673-0291.2018.06.016 |
|
| [22] |
雷静桃, 俞煌颖. 四足机器人气动人工肌肉驱动的仿生柔性机体动力学分析[J]. 上海交通大学学报, 2014, 48(12):1688-1693.
|
|
|
|
| [23] |
|
| [24] |
李庆中, 李晓丹, 于福杰, 等. 介电弹性体式蛙型仿生软体机器人设计[J]. 兵工学报, 2022, 43(1):140-147.
|
|
doi: 10.3969/j.issn.1000-1093.2022.01.015 |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
廖峻北, 伊烁闻, 雷飞, 等. 连续变刚度仿生驱动关节的设计与建模分析[J]. 兵工学报, 2023, 44(11):3269-3278.
doi: 10.12382/bgxb.2023.0730 |
|
doi: 10.12382/bgxb.2023.0730 |
|
| [29] |
刘思宇, 廖峻北, 雷飞, 等. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2024, 44(增刊2):71-83.
|
|
doi: 10.12382/bgxb.2023.0897 |
|
| [30] |
doi: 10.1038/s41598-021-88879-0 pmid: 33953253 |
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
蔡润斌. 四足机器人运动规划及协调控制[D]. 长沙: 国防科学技术大学, 2013.
|
|
|
|
| [35] |
|
| [1] | 赵薇, 王峰, 马星宇, 翟伟光, 孟鹏帅. 基于动态区域剔除与稠密地图构建的视觉SLAM算法[J]. 兵工学报, 2025, 46(3): 240217-. |
| [2] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [3] | 邢伯阳, 许威, 李宇峰, 赵浩宇, 王康, 闫曈. 基于分层解耦的四轮足机器人模型预测控制[J]. 兵工学报, 2024, 45(12): 4272-4282. |
| [4] | 李仲, 管小荣, 李回滨, 何龙, 龙亿. 有源刚性下肢助力外骨骼研究现状与关键技术分析[J]. 兵工学报, 2024, 45(S1): 262-270. |
| [5] | 李回滨, 马贺, 刘鹏飞, 杨沛应, 管小荣. 外肢体发展现状分析与军事应用前景展望[J]. 兵工学报, 2024, 45(S1): 287-295. |
| [6] | 党婉莹, 周乐来, 李贻斌, 张辰. 模块化机器人最优越野构型神经网络规划方法[J]. 兵工学报, 2024, 45(10): 3674-3685. |
| [7] | 孙鹏耀, 黄炎焱, 王凯生. 基于势场增强烟花算法的二维全局路径规划[J]. 兵工学报, 2024, 45(10): 3499-3518. |
| [8] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [9] | 刘亚丽, 鲁妍池, 徐小龙, 宋遒志. 外骨骼机器人助力效能测试方法及应用综述[J]. 兵工学报, 2024, 45(8): 2497-2519. |
| [10] | 潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [11] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [12] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [13] | 岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1): 156-165. |
| [14] | 苏治宝, 项燊, 余雪玮, 安旭阳. 一种全要素自主车队协同控制仿真系统[J]. 兵工学报, 2023, 44(S2): 35-43. |
| [15] | 赵熙俊, 崔星, 李兆冬, 王一全, 杨雨. 编队机动自适应车间距保持控制[J]. 兵工学报, 2023, 44(S2): 44-51. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4