
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240343-.doi: 10.12382/bgxb.2024.0343
何子琦, 李博宸, 王成罡, 宋磊*( )
)
收稿日期:2024-03-03
上线日期:2025-04-30
通讯作者:
基金资助:
HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei*()
Received:2024-03-03
Online:2025-04-30
摘要:
针对区域防御任务中多个入侵者的拦截问题,考虑追捕任务间时序关系与总体拦截效能,提出一种多无人机序列捕捉算法。基于任务的长期规划收益与短期执行效果构建任务的时序收益与空间收益,分别作为任务分配和任务执行的优化目标,实现复杂博弈问题的动态实时求解。基于可达集方法描述攻防双方优势程度并构建任务时序收益,引入深度Q网络对其进行估计进而引导任务分配;基于任务空间收益求解单攻击者追逃博弈问题,给出连续动作空间任务执行的最优控制策略。仿真结果表明,所提算法通过优化任务时空收益能够实现多无人机间的有效合作,提升防御方的捕获成功率,并具有较强的可扩展性。
中图分类号:
何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-.
HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense[J]. Acta Armamentarii, 2025, 46(4): 240343-.
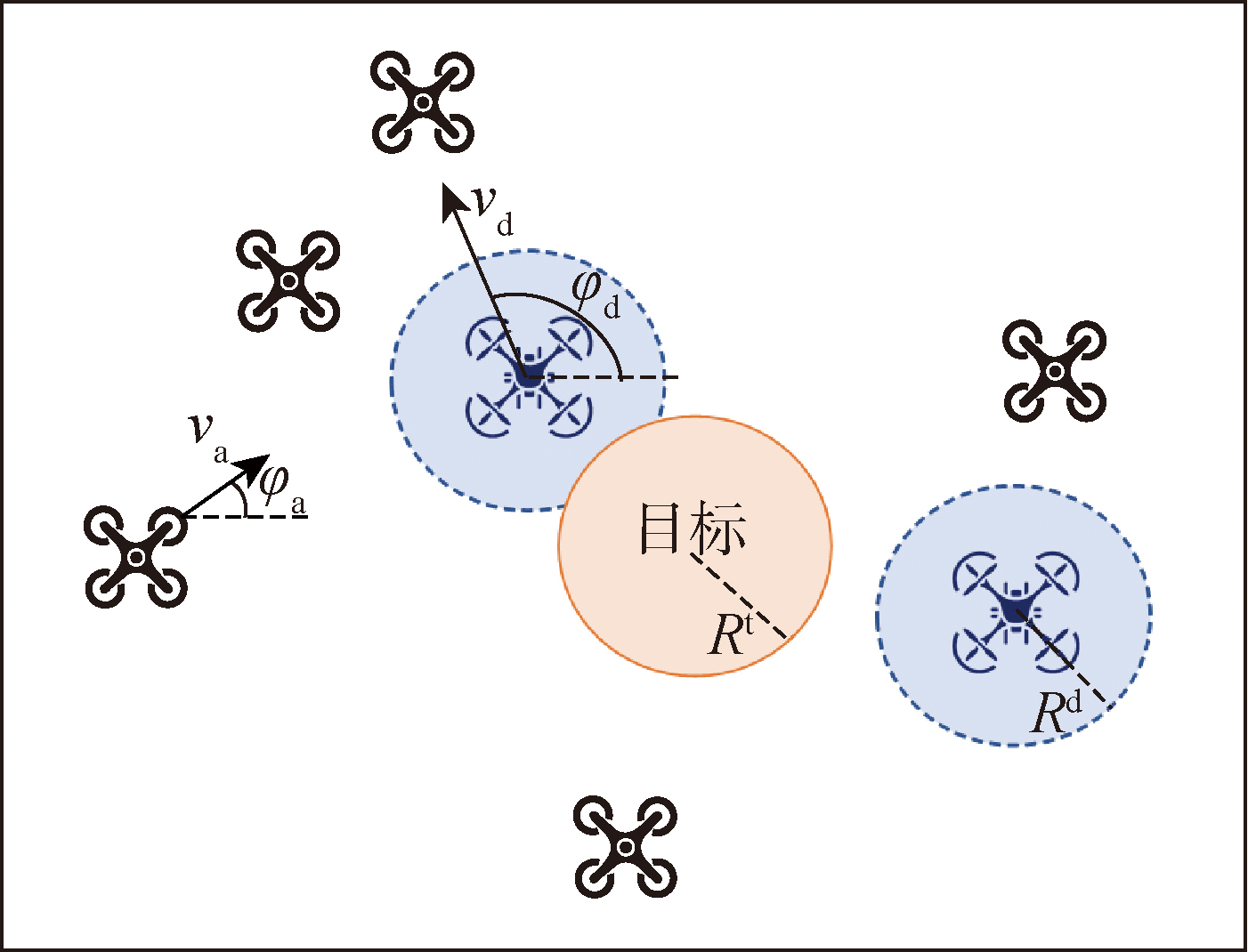
图1 问题场景示意图
Fig.1 Schematic diagram of a problem scenario

图2 算法框架示意图
Fig.2 Schematic diagram of algorithm framework
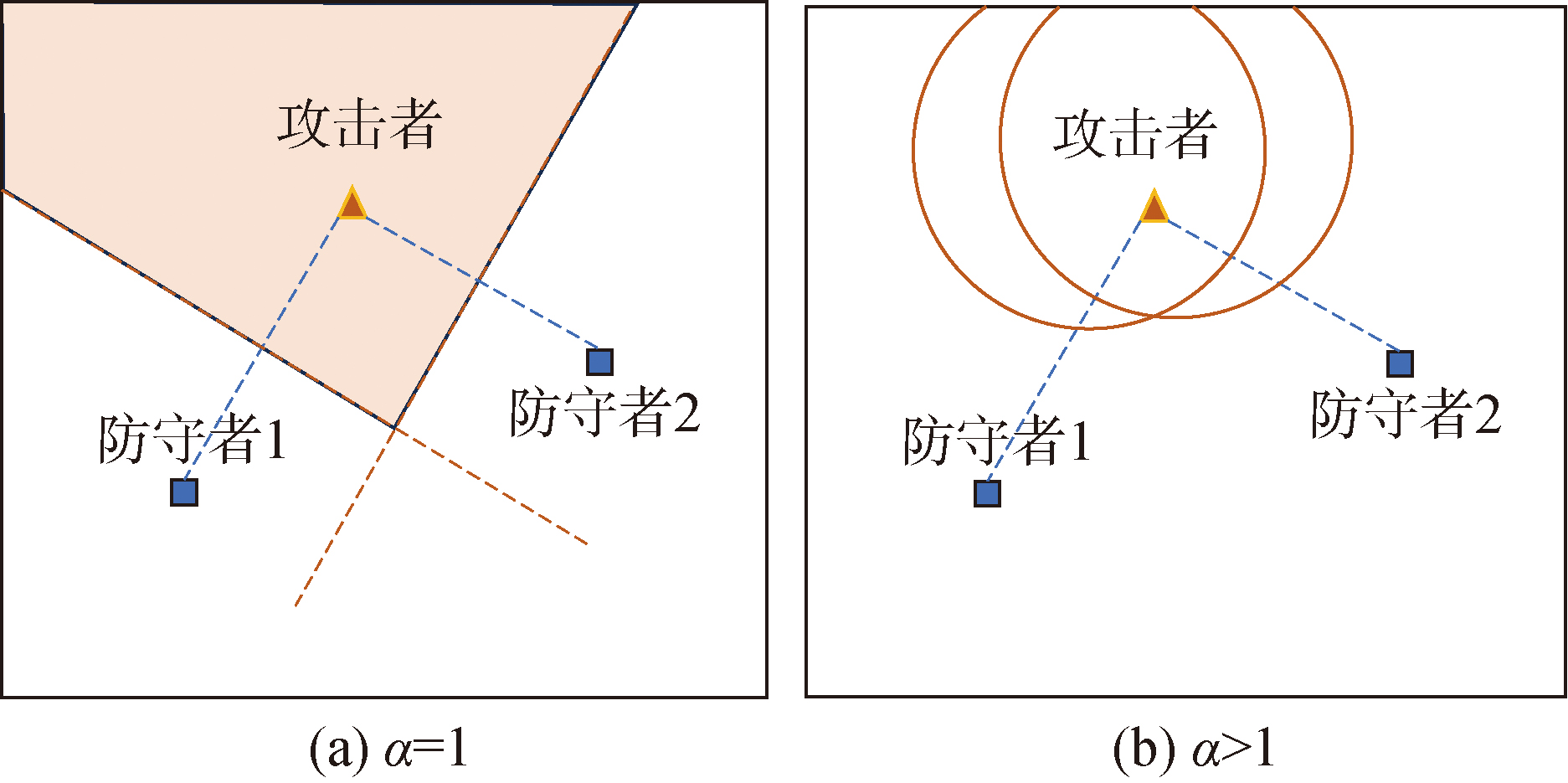
图3 R d j=0时攻击者的可达集
Fig.3 The attacker’s reachable set for R d j=0
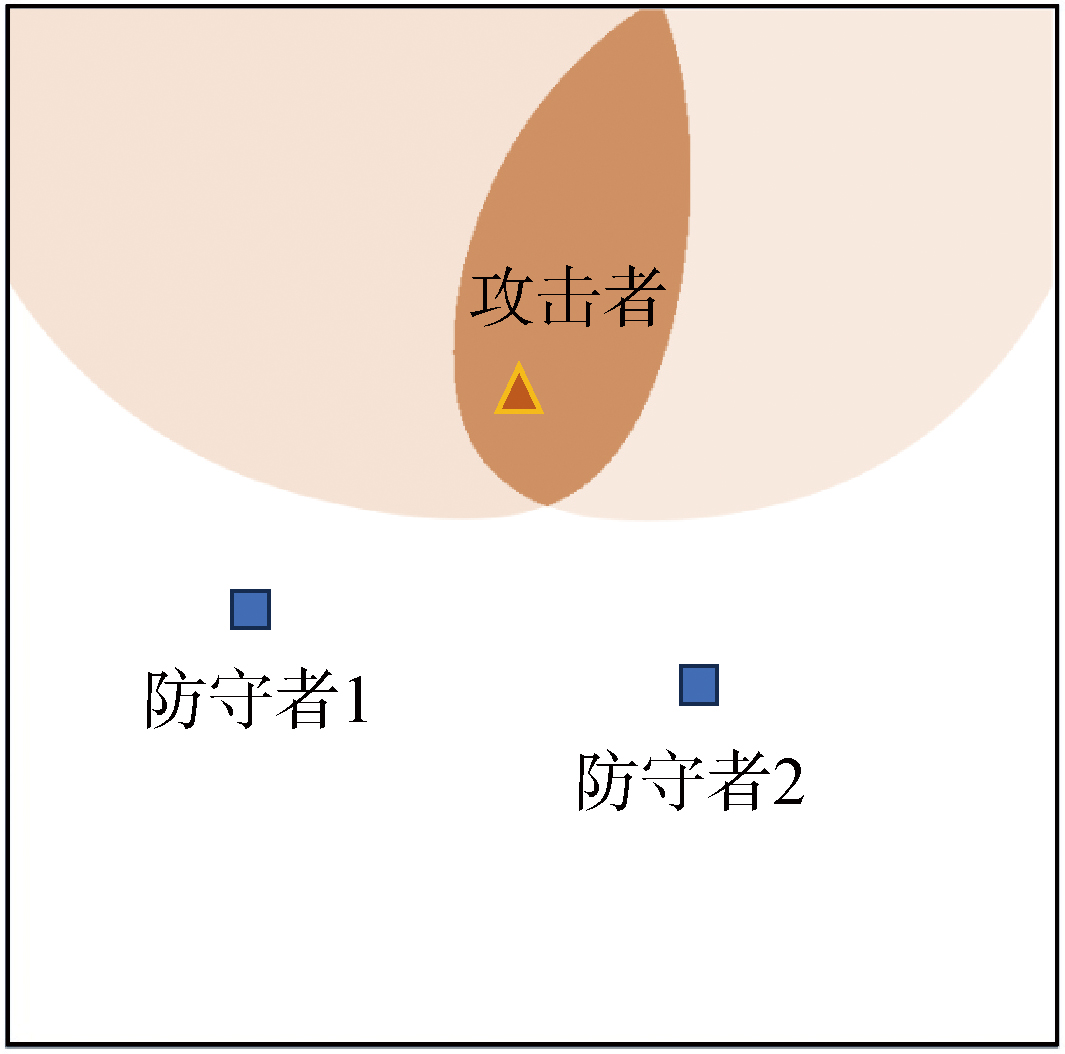
图4 R d j≠0时攻击者的可达集
Fig.4 The attacker’s reachable set for R d j≠0
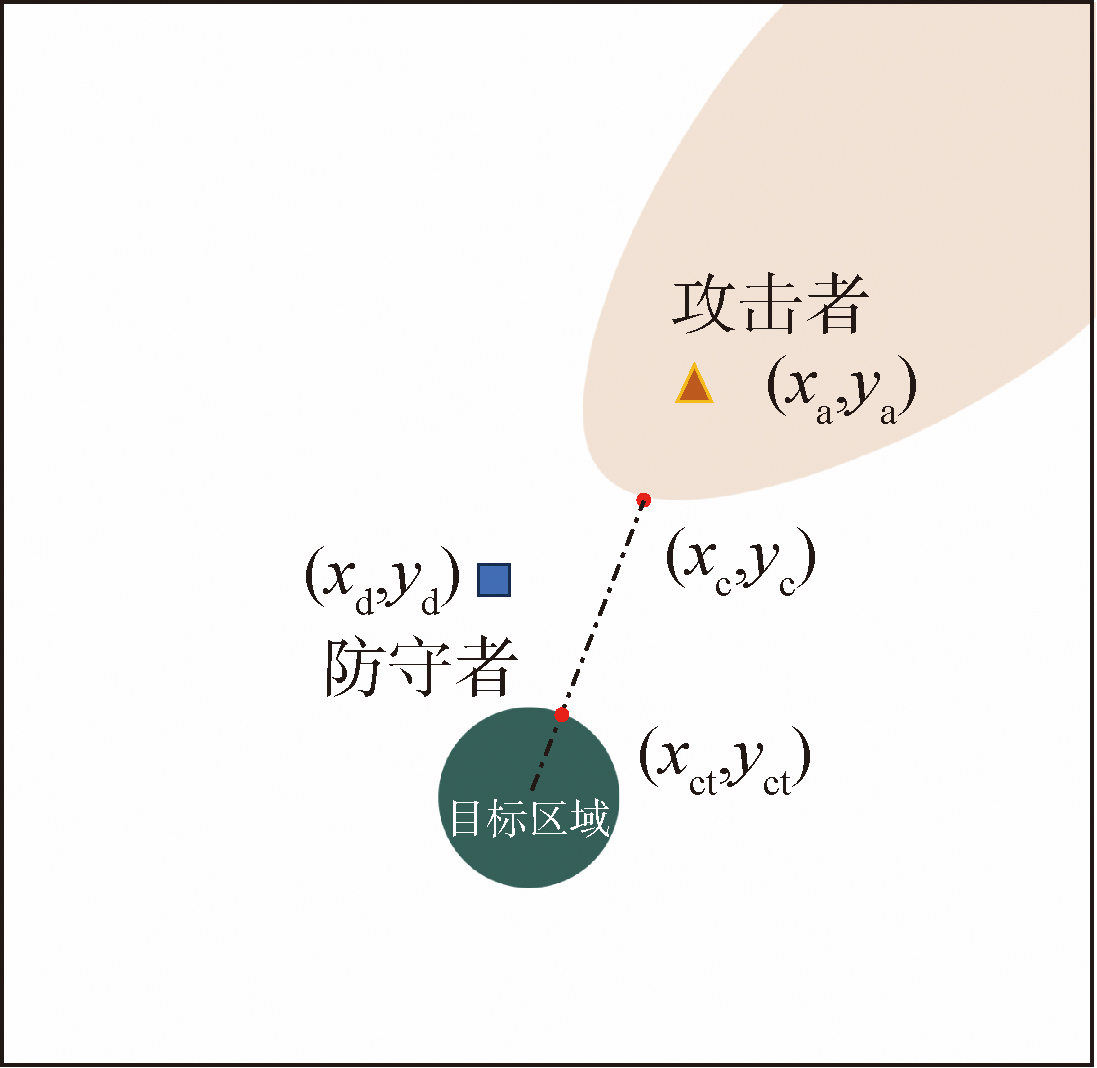
图5 追捕任务的空间收益
Fig.5 Spatial reward of pursuit mission
图6 所有可能的最优捕获点
Fig.6 All possible optimal capture points
图7 最优捕获点求解算法
Fig.7 Optimal capture point solving algorithm
图8 DQN算法结构示意图
Fig.8 Schematic diagram of DQN
图9 神经网络结构示意图
Fig.9 Schematic diagram of neural net

图10 序列捕捉算法流程
Fig.10 Flowchart of sequential capture algorithm
| 参数 | 数值 |
|---|---|
| γ | 0.98 |
| M | 12800 |
| NBatchSize | 64 |
| η | 0.0003 |
| NmaxEp | 40000 |
| NmaxStep | 120 |
| εmax | 0.95 |
| Δε | 0.001 |
| NPrestep | 4000 |
表1 算法训练参数
Table 1 Training parameters of the algorithm
| 参数 | 数值 |
|---|---|
| γ | 0.98 |
| M | 12800 |
| NBatchSize | 64 |
| η | 0.0003 |
| NmaxEp | 40000 |
| NmaxStep | 120 |
| εmax | 0.95 |
| Δε | 0.001 |
| NPrestep | 4000 |
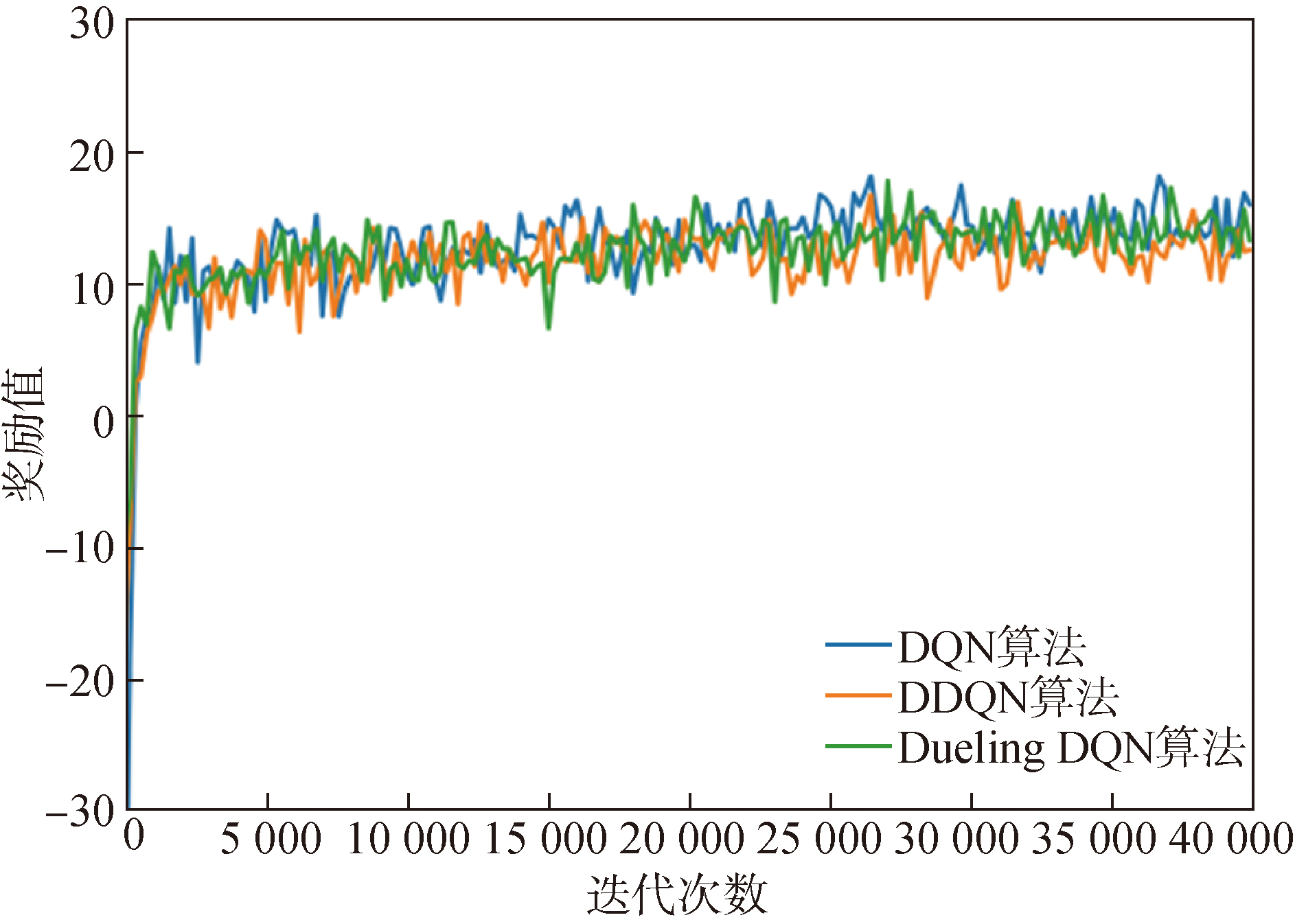
图11 训练平均奖励
Fig.11 Average reward curves of training

图12 防守无人机运动轨迹
Fig.12 The trajectories of defenders
| 算法 | 平均拦截失败数量 |
|---|---|
| DQN算法 | 1.15 |
| DDQN算法 | 1.13 |
| Dueling DQN算法 | 1.13 |
| 基于最优匹配的任务规划算法 | 1.51 |
| 基于改进粒子群的任务规划算法 | 2.96 |
表2 不同算法的平均拦截失败数量测试结果
Table 2 Test results of the average number of interception failures for different algorithms
| 算法 | 平均拦截失败数量 |
|---|---|
| DQN算法 | 1.15 |
| DDQN算法 | 1.13 |
| Dueling DQN算法 | 1.13 |
| 基于最优匹配的任务规划算法 | 1.51 |
| 基于改进粒子群的任务规划算法 | 2.96 |
| 编号 | 坐标/km |
|---|---|
| 1 | (-3.00,2.00) |
| 2 | (-2.75,2.25) |
| 3 | (-2.50,2.50) |
| 4 | (-2.25,2.75) |
| 5 | (1.00,2.50) |
| 6 | (-3.50,-4.25) |
| 7 | (-3.25,-4.25) |
| 8 | (-3.00,-4.25) |
| 9 | (-2.75,-4.25) |
| 10 | (2.00,-4.00) |
表3 攻击方无人机初始坐标
Table 3 Attacker’s initial coordinates
| 编号 | 坐标/km |
|---|---|
| 1 | (-3.00,2.00) |
| 2 | (-2.75,2.25) |
| 3 | (-2.50,2.50) |
| 4 | (-2.25,2.75) |
| 5 | (1.00,2.50) |
| 6 | (-3.50,-4.25) |
| 7 | (-3.25,-4.25) |
| 8 | (-3.00,-4.25) |
| 9 | (-2.75,-4.25) |
| 10 | (2.00,-4.00) |
| 编号 | 坐标/km |
|---|---|
| 1 | (-1.25,-1.50) |
| 2 | (-1.00,-1.50) |
表4 防守方无人机初始坐标
Table 4 Defender’s initial coordinates
| 编号 | 坐标/km |
|---|---|
| 1 | (-1.25,-1.50) |
| 2 | (-1.00,-1.50) |

图13 基于最优匹配的任务规划算法下无人机运动轨迹
Fig.13 The trajectories of UAVs obtained by task planning algorithm based on optimal matching
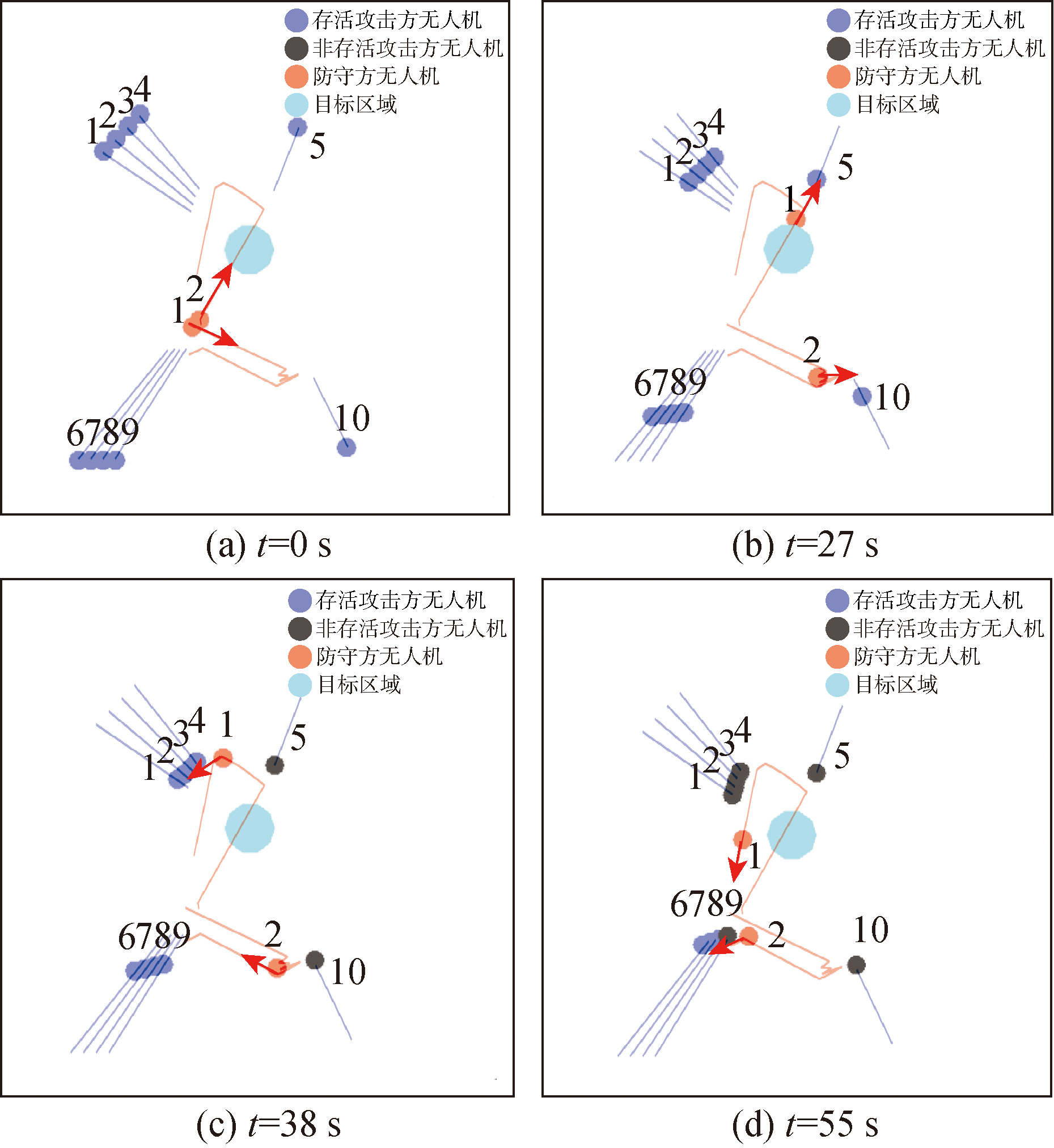
图14 基于时空收益的序列捕捉算法下无人机运动轨迹
Fig.14 The trajectories of UAVs obtained by sequential capture algorithm based on temporal and spatial rewards

图15 不同攻击方数量条件下的平均奖励
Fig.15 Average reward curves under different numbers of attackers
| 场景 | 平均拦截失败数量 |
|---|---|
| 2对5 | 0.26 |
| 2对10 | 1.15 |
| 2对15 | 2.36 |
表5 攻击方数量不同条件下的平均拦截失败数量
Table 5 Average number of failed interceptions under different numbers of attackers
| 场景 | 平均拦截失败数量 |
|---|---|
| 2对5 | 0.26 |
| 2对10 | 1.15 |
| 2对15 | 2.36 |
| [1] |
孔国杰, 冯时, 于会龙, 等. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1):11-26.
doi: 10.12382/bgxb.2022.0930 |
|
doi: 10.12382/bgxb.2022.0930 |
|
| [2] |
|
| [3] |
李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9):2533-2545.
doi: 10.12382/bgxb.2023.0514 |
|
doi: 10.12382/bgxb.2023.0514 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
王磊, 徐超, 李淼, 等. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8):2224-2232.
doi: 10.12382/bgxb.2022.0968 |
|
doi: 10.12382/bgxb.2022.0968 |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
刘冰雁, 叶雄兵, 高勇, 等. 基于分支深度强化学习的非合作目标追逃博弈策略求解[J]. 航空学报, 2020, 41(10):324040.
doi: 10.7527/S1000-6893.2020.24040 |
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
张嘉玲, 姜永超, 李博宸, 等. 面向反水雷的海空协同时间最优雷区覆盖规划方法[J]. 指挥与控制学报, 2023, 9(4):469-477.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | 李宗刚, 韩森, 陈引娟, 宁小刚. 基于角度搜索和深度Q网络的移动机器人路径规划算法[J]. 兵工学报, 2025, 46(2): 240265-. |
| [2] | 侯鹏, 葛玉雪, 裴扬, 岳源, 艾俊强. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2): 240212-. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 张堃, 刘泽坤, 华帅, 张振冲, 李珂, 于竞婷. 基于T/S-SAS的多无人机四维协同攻击航线生成[J]. 兵工学报, 2023, 44(6): 1576-1587. |
| [5] | 尹依伊, 王晓芳, 周健. 基于Q学习的多无人机协同航迹规划方法[J]. 兵工学报, 2023, 44(2): 484-495. |
| [6] | 刘冰雁, 叶雄兵, 岳智宏, 董献洲, 张其扬. 基于多组并行深度Q网络的连续空间追逃博弈算法[J]. 兵工学报, 2021, 42(3): 663-672. |
| [7] | 刘重, 高晓光, 符小卫, 牟之英. 未知环境下异构多无人机协同搜索打击中的联盟组建[J]. 兵工学报, 2015, 36(12): 2284-2297. |
| [8] | 国海峰, 丁达理, 吴文超, 刘尧林. 多无人机远距突防协同目标搜索决策[J]. 兵工学报, 2014, 35(2): 248-255. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4