
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (1): 231104-.doi: 10.12382/bgxb.2023.1104
钟岳1,*( ), 徐峰1, 闫猛飞1, 刘义乐2
), 徐峰1, 闫猛飞1, 刘义乐2
收稿日期:2024-07-03
上线日期:2024-12-07
通讯作者:
基金资助:
ZHONG Yue1,*(), XU Feng1, YAN Mengfei1, LIU Yile2
Received:2024-07-03
Online:2024-12-07
摘要:
时间序列匹配技术广泛应用于车辆操纵一致性评价。针对某型教练车在协同驾驶过程中的动作匹配度评判问题,提出一种基于分段式动态时间弯曲距离的车辆油门操纵动作一致性评估方法。在有效解决教练车协同操控试验过程中样本数据点数量不一致问题的基础上,根据动态弯曲路径的斜率约束条件,将传统的动态时间弯曲距离(Dynamic Time Warping,DTW)矩形搜索区域通过改变路径搜索斜率方式转变为平行四边形搜索区域,以缩小搜索区域面积,从而极大程度地减小计算量。选取4组典型的油门动作曲线组进行50轮迭代实验进行验证,通过分段式DTW方法计算得到实车A、教练车B动作曲线之间的DTW距离矩阵,利用最小离差平方法对A、B两车动作进行聚类对象合并,从而完成油门动作数据的一致性评判。实验结果表明,改进后的动态时间弯曲算法在各油门动作的平均匹配精度可达89.2%,相较于单一的DTW算法提升约3.2%,平均匹配时间约为92.45s,降低约12.6%,从而验证了分段式DTW算法在油门动作一致性评判的可行性和优越性。
中图分类号:
钟岳, 徐峰, 闫猛飞, 刘义乐. 基于改进DTW算法的车辆操纵一致性评价方法[J]. 兵工学报, 2025, 46(1): 231104-.
ZHONG Yue, XU Feng, YAN Mengfei, LIU Yile. An Evaluation Method of Vehicle Handling Consistency Based on Improved DTW Algorithm[J]. Acta Armamentarii, 2025, 46(1): 231104-.
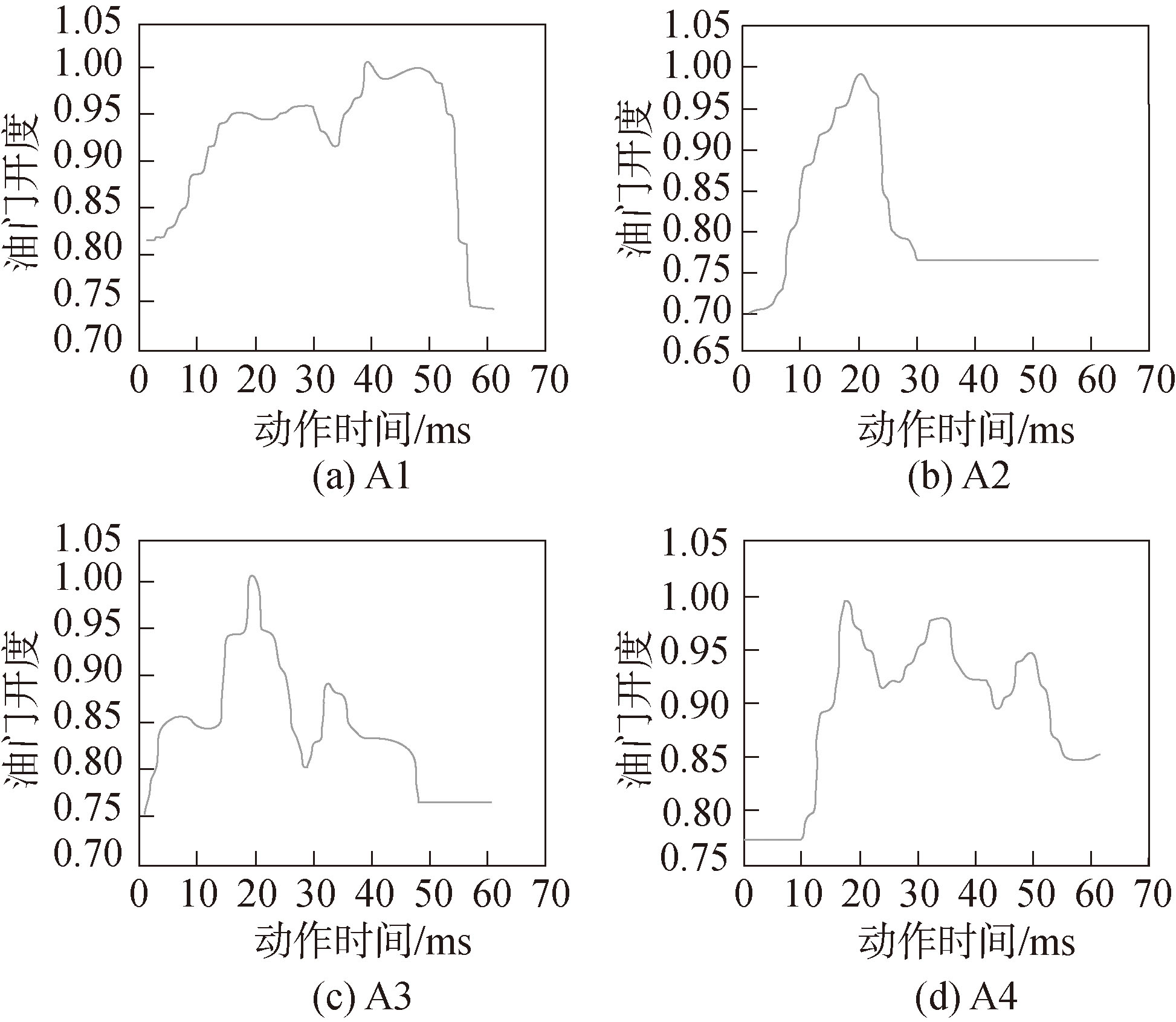
图1 A车油门动作曲线
Fig.1 Throttle action curve of vehicle A

图2 B车油门动作曲线
Fig.2 Throttle action curve of vehicle B
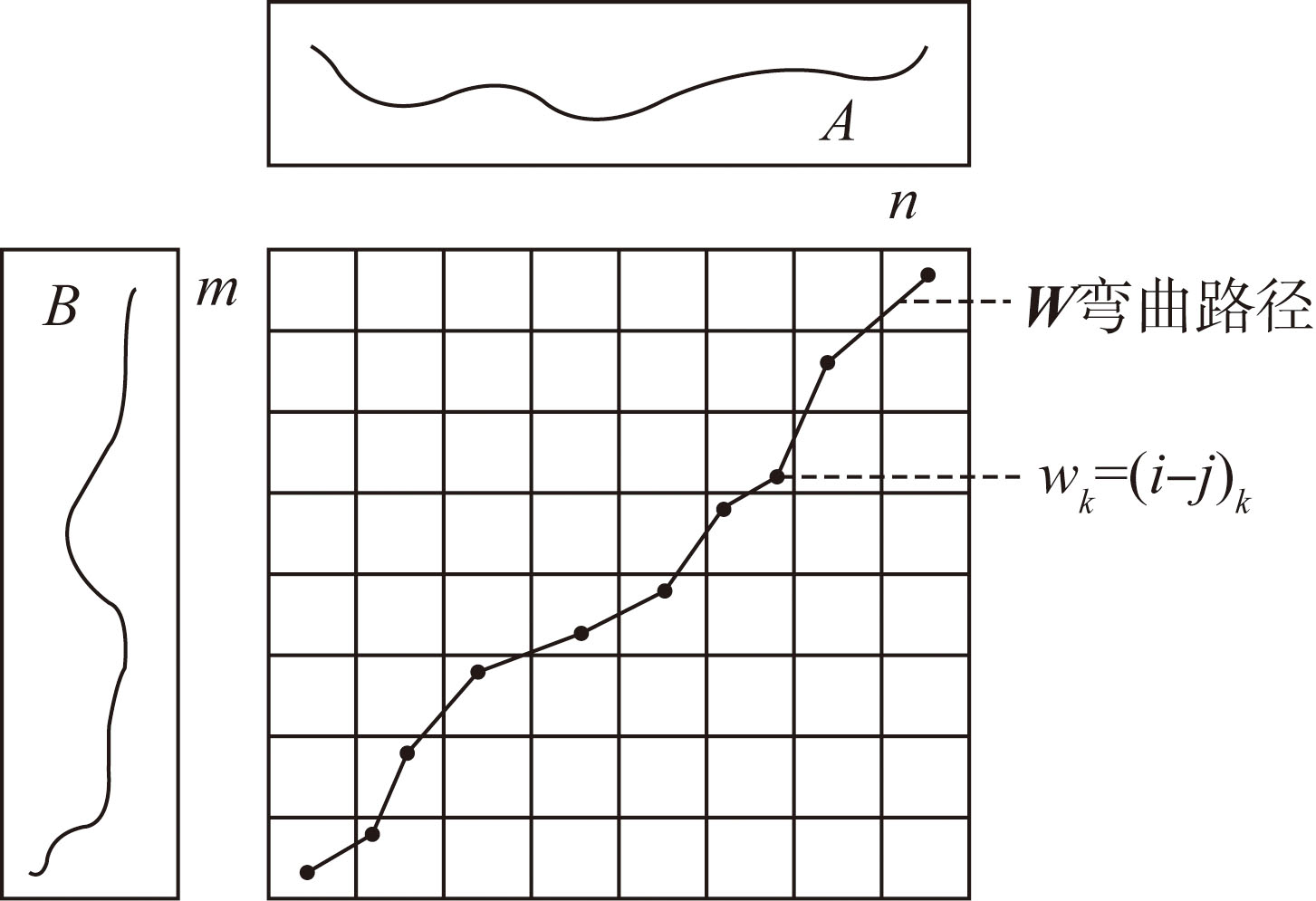
图3 动态弯曲距离路径示意图
Fig.3 Dynamic bending distance path diagram
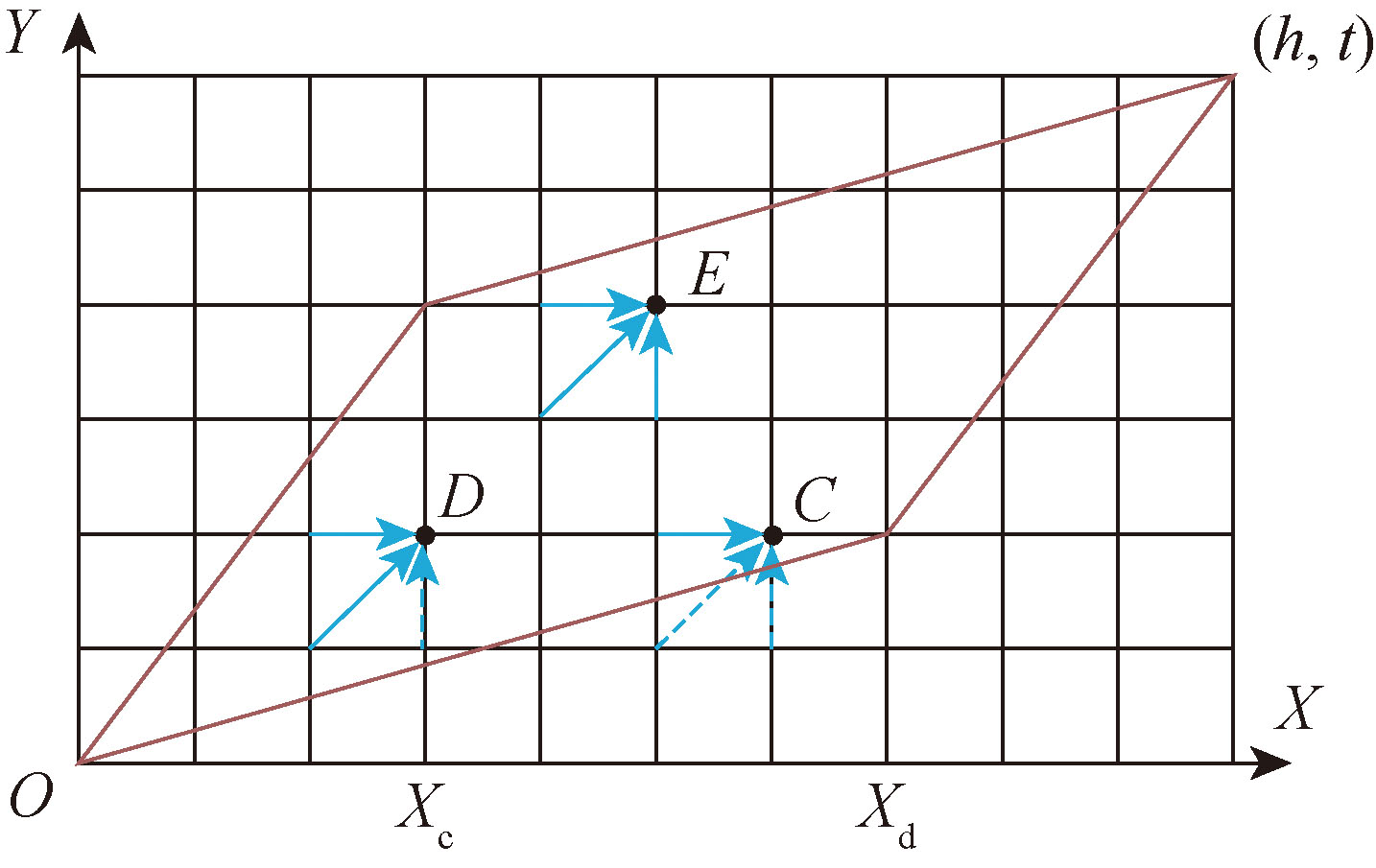
图4 DTW平行四边形搜索区域
Fig.4 DTW parallelogram search area
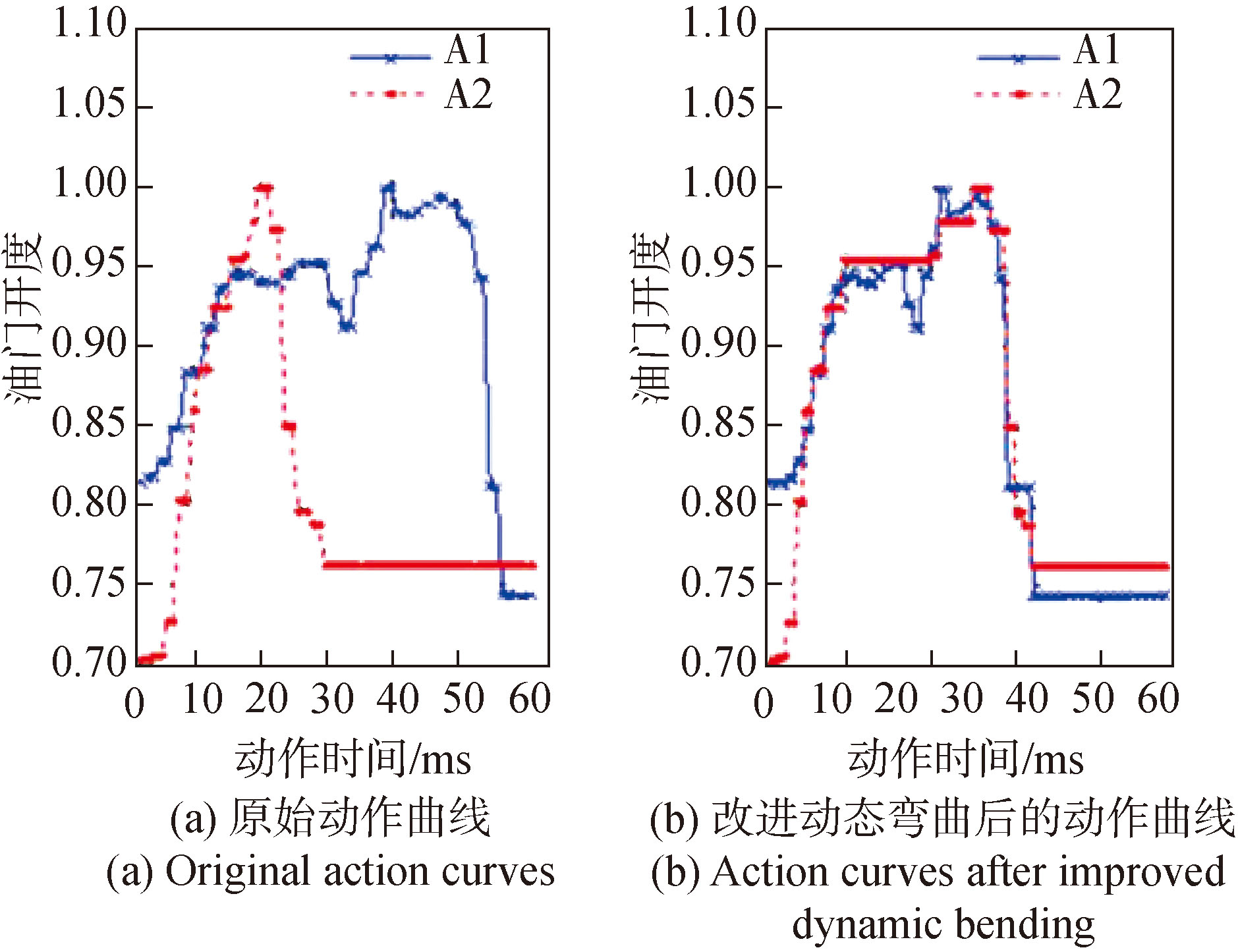
图5 A1、A2组原始动作曲线和改进动态弯曲后的动作曲线
Fig.5 Original action curves of Groups A1 and A2 and their action curves after improved dynamic bending
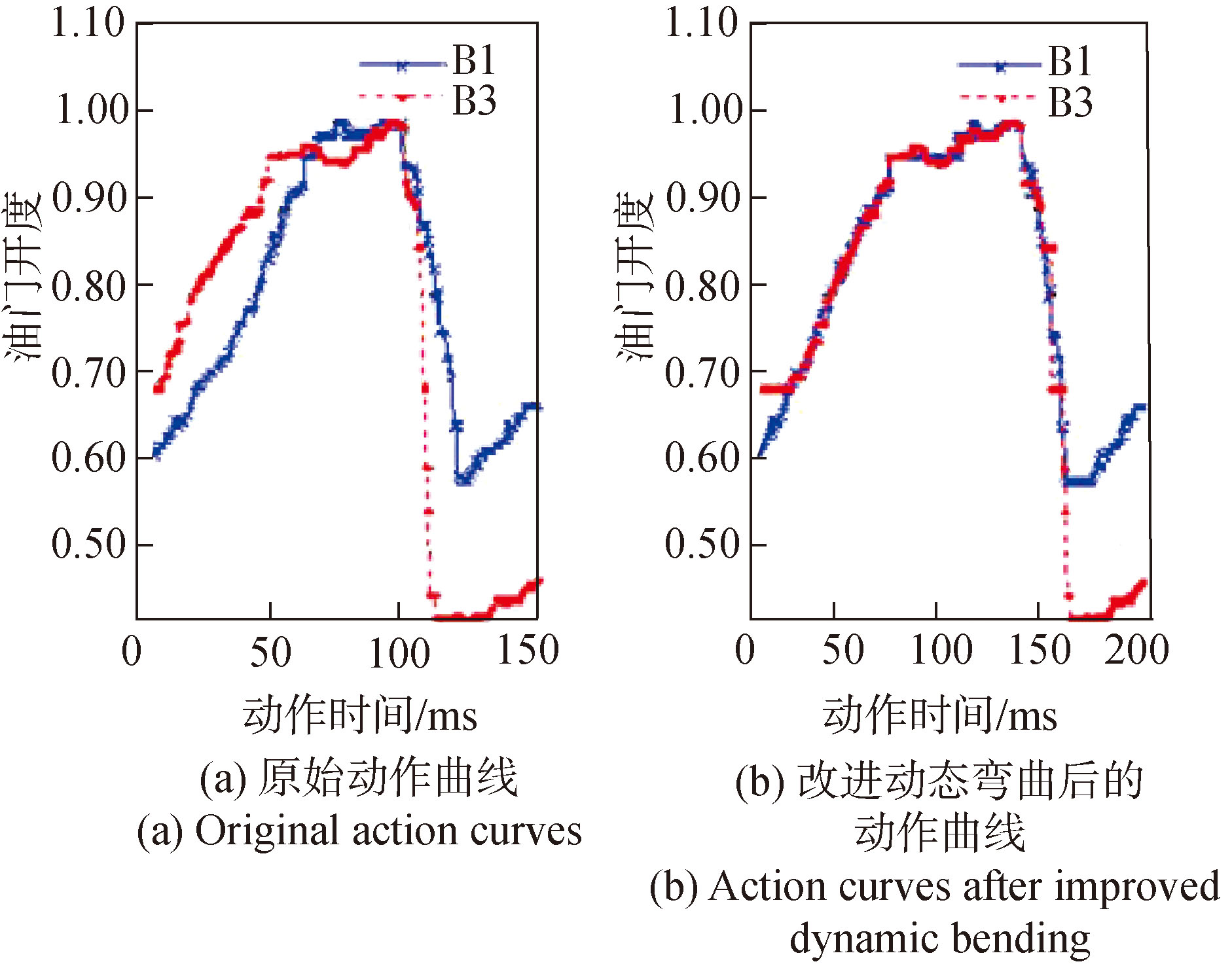
图6 B1、B3组曲线的原始数据和DTW距离
Fig.6 Raw data and DTW distances of Groups B1 and B3 action curves
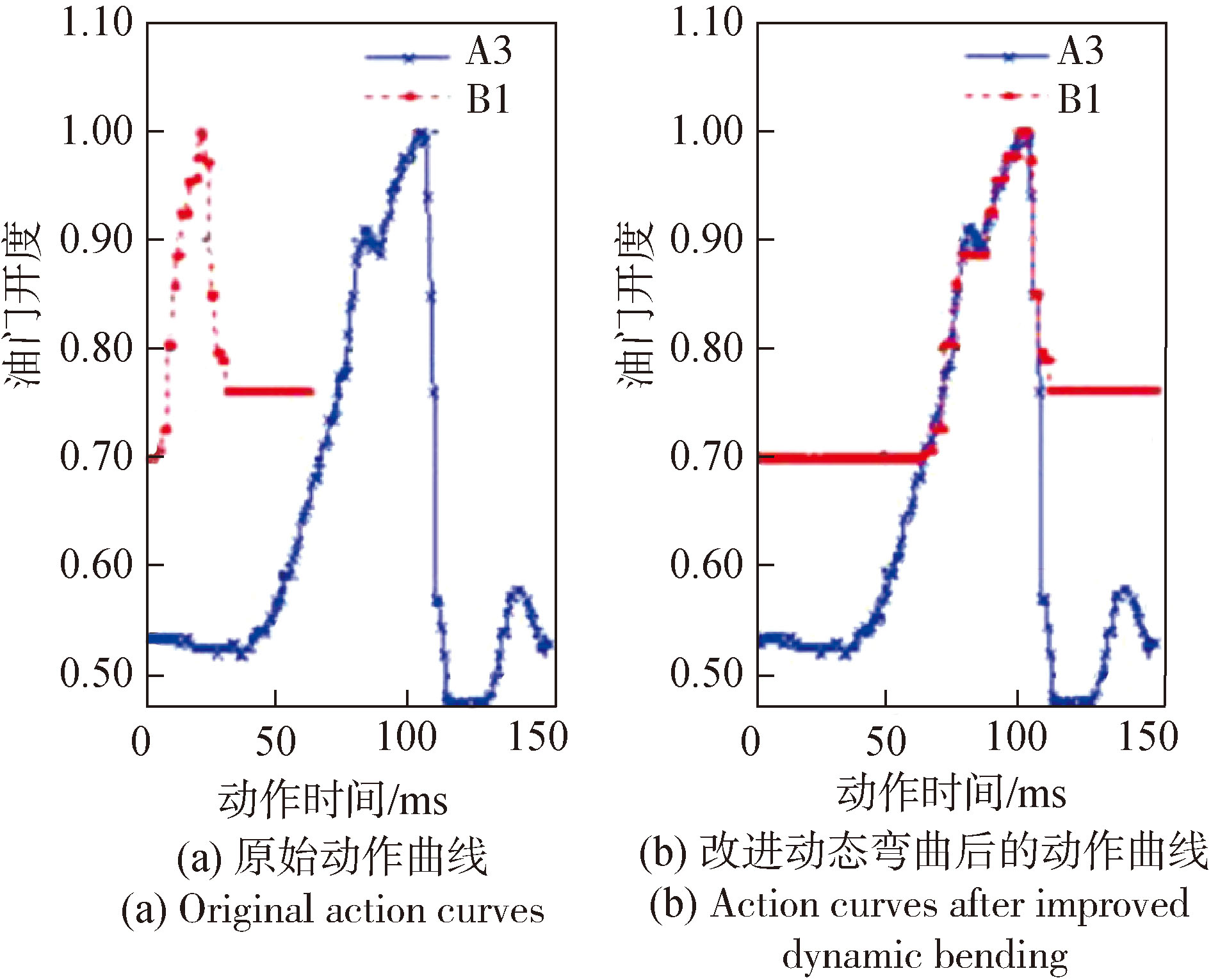
图7 A3、B1油门动作曲线原始数据和DTW距离
Fig.7 Raw data and DTW distances of Groups A3 and B1 action curves
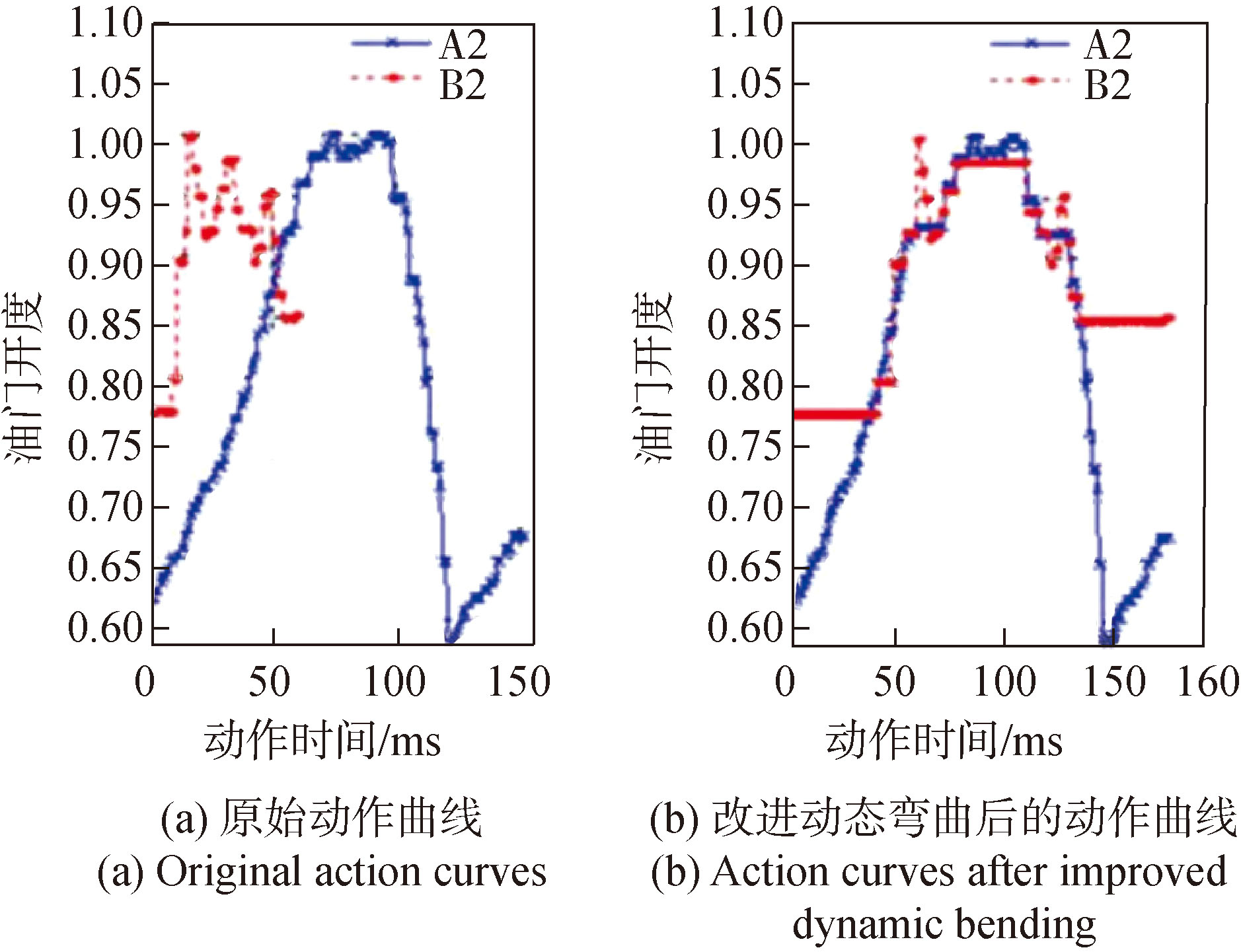
图8 A2、B2油门动作曲线原始数据和DTW距离
Fig.8 Raw data and DTW distances of Groups A2 and B2 action curves
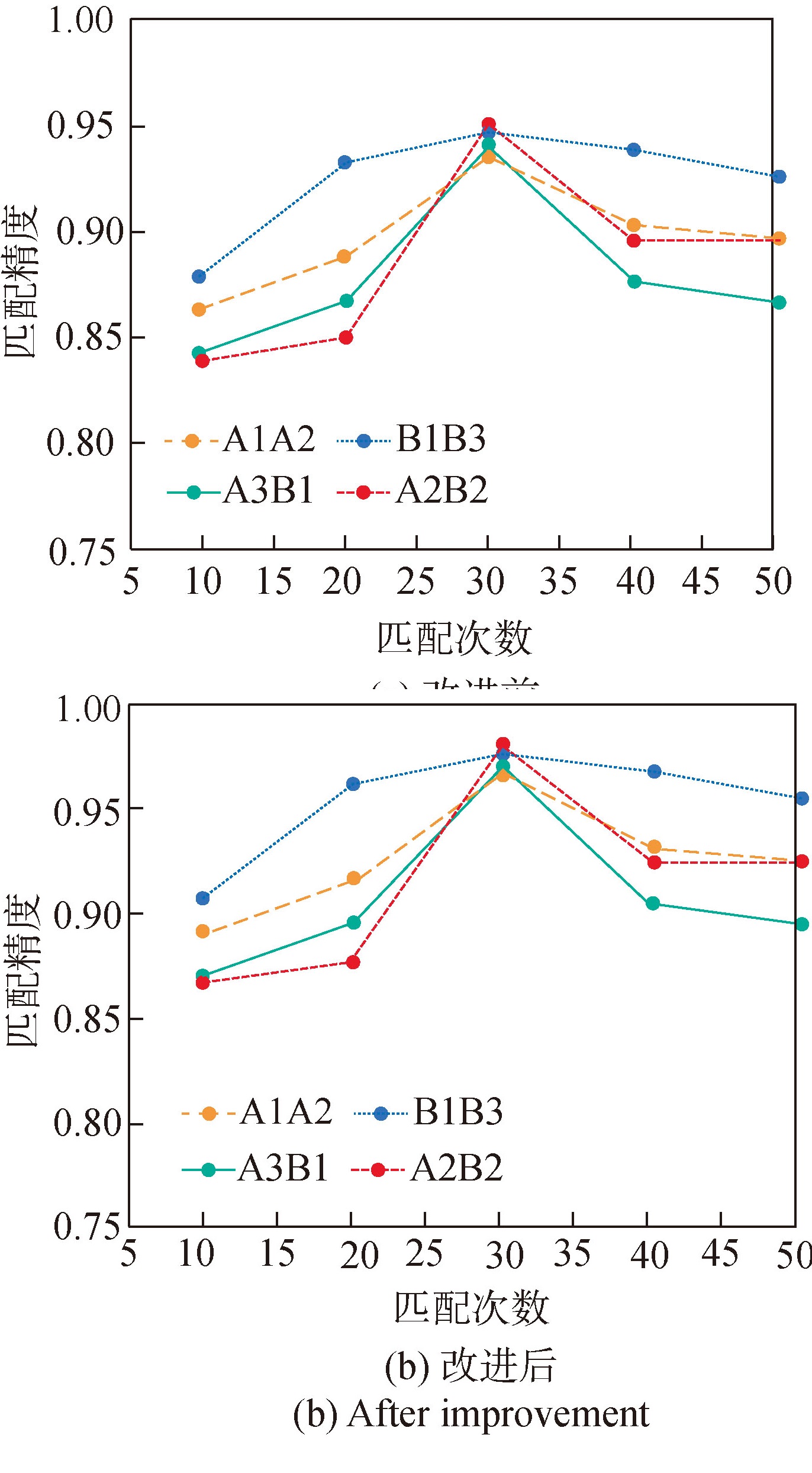
图9 DTW改进前后的匹配精度对比
Fig.9 Comparison of matching accuracies before and after DTW improvement
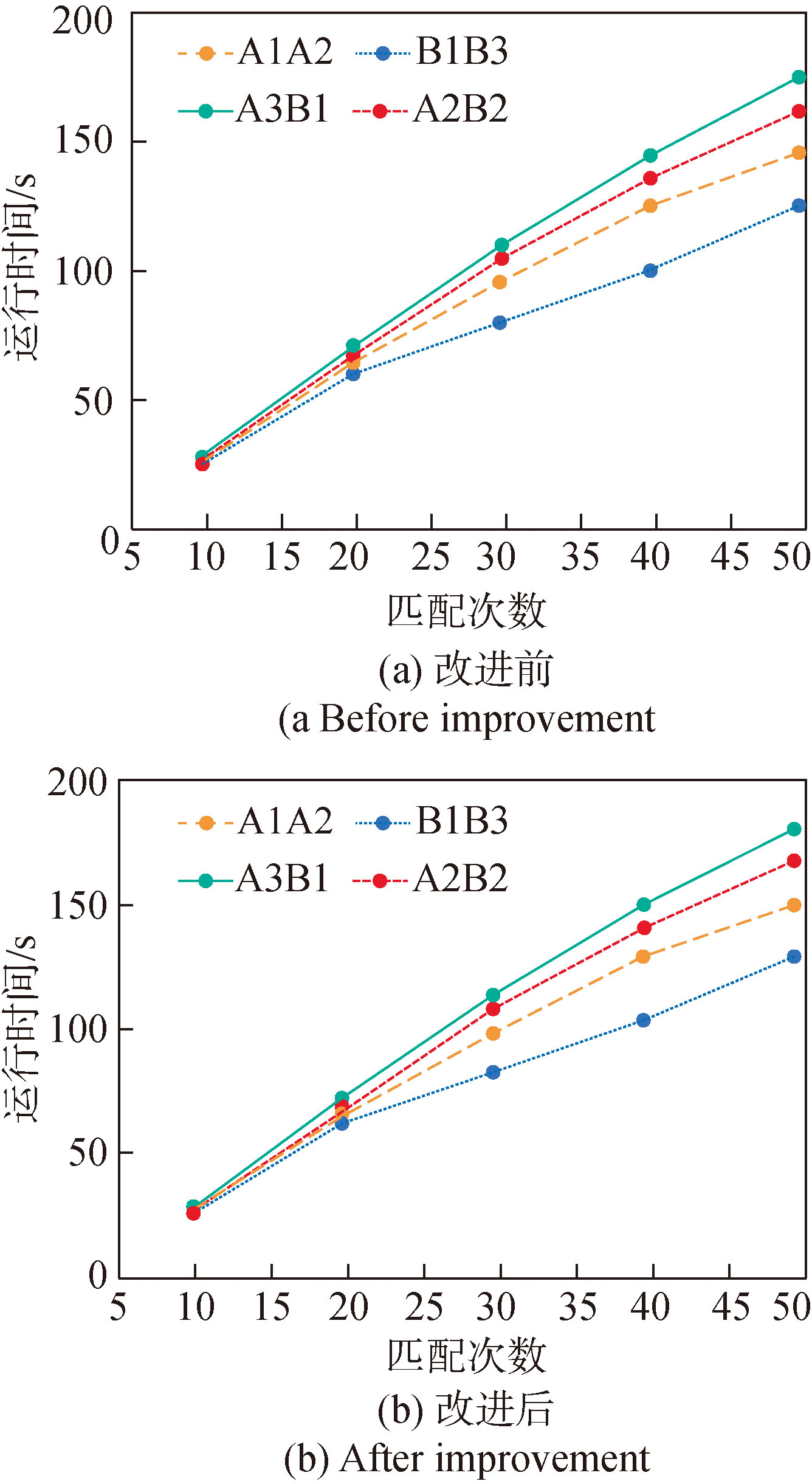
图10 DTW改进前后的匹配时间对比
Fig.10 Comparison of matching times before and after DTW improvement
| 匹配算法 | 平均匹配精度 | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 0.866 | 0.876 | 0.844 | 0.85 |
| 分段式DTW | 0.894 | 0.912 | 0.88 | 0.882 |
表1 DTW算法改进前后的匹配精度
Table 1 The matching accuracies of DTW algorithm before and after improvement
| 匹配算法 | 平均匹配精度 | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 0.866 | 0.876 | 0.844 | 0.85 |
| 分段式DTW | 0.894 | 0.912 | 0.88 | 0.882 |
| 匹配算法 | 平均匹配时间/s | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 96.48 | 79.88 | 126.86 | 119.9 |
| 分段式DTW | 89.5 | 76.46 | 105.36 | 98.46 |
表2 DTW算法改进前后的匹配时间
Table 2 The matching times of DTW algorithm before and after improvement
| 匹配算法 | 平均匹配时间/s | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 96.48 | 79.88 | 126.86 | 119.9 |
| 分段式DTW | 89.5 | 76.46 | 105.36 | 98.46 |
| 曲线编号 | A1 | A2 | A3 | A4 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|---|---|---|
| A1 | 0 | A组曲线的平均DTW距离:21.761 B组曲线的平均DTW距离:2.547 AB曲线的平均DTW距离:26.692 | ||||||
| A2 | 9.382 | 0 | ||||||
| A3 | 9.544 | 12.734 | 0 | |||||
| A4 | 38.835 | 36.698 | 23.374 | 0 | ||||
| B1 | 9.76 | 27.777 | 15.559 | 52.053 | 0 | |||
| B2 | 6.6019 | 20.42 | 15.297 | 52.633 | 2.104 | 0 | ||
| B3 | 8.2896 | 24.6453 | 16.960 | 53.585 | 1.757 | 1.375 | 0 | |
| B4 | 12.439 | 29.7243 | 20.105 | 61.220 | 2.116 | 4.669 | 3.260 | 0 |
表3 两车油门动作间的DTW距离
Table 3 DTW distances between the throttle actions of two vehicles
| 曲线编号 | A1 | A2 | A3 | A4 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|---|---|---|
| A1 | 0 | A组曲线的平均DTW距离:21.761 B组曲线的平均DTW距离:2.547 AB曲线的平均DTW距离:26.692 | ||||||
| A2 | 9.382 | 0 | ||||||
| A3 | 9.544 | 12.734 | 0 | |||||
| A4 | 38.835 | 36.698 | 23.374 | 0 | ||||
| B1 | 9.76 | 27.777 | 15.559 | 52.053 | 0 | |||
| B2 | 6.6019 | 20.42 | 15.297 | 52.633 | 2.104 | 0 | ||
| B3 | 8.2896 | 24.6453 | 16.960 | 53.585 | 1.757 | 1.375 | 0 | |
| B4 | 12.439 | 29.7243 | 20.105 | 61.220 | 2.116 | 4.669 | 3.260 | 0 |
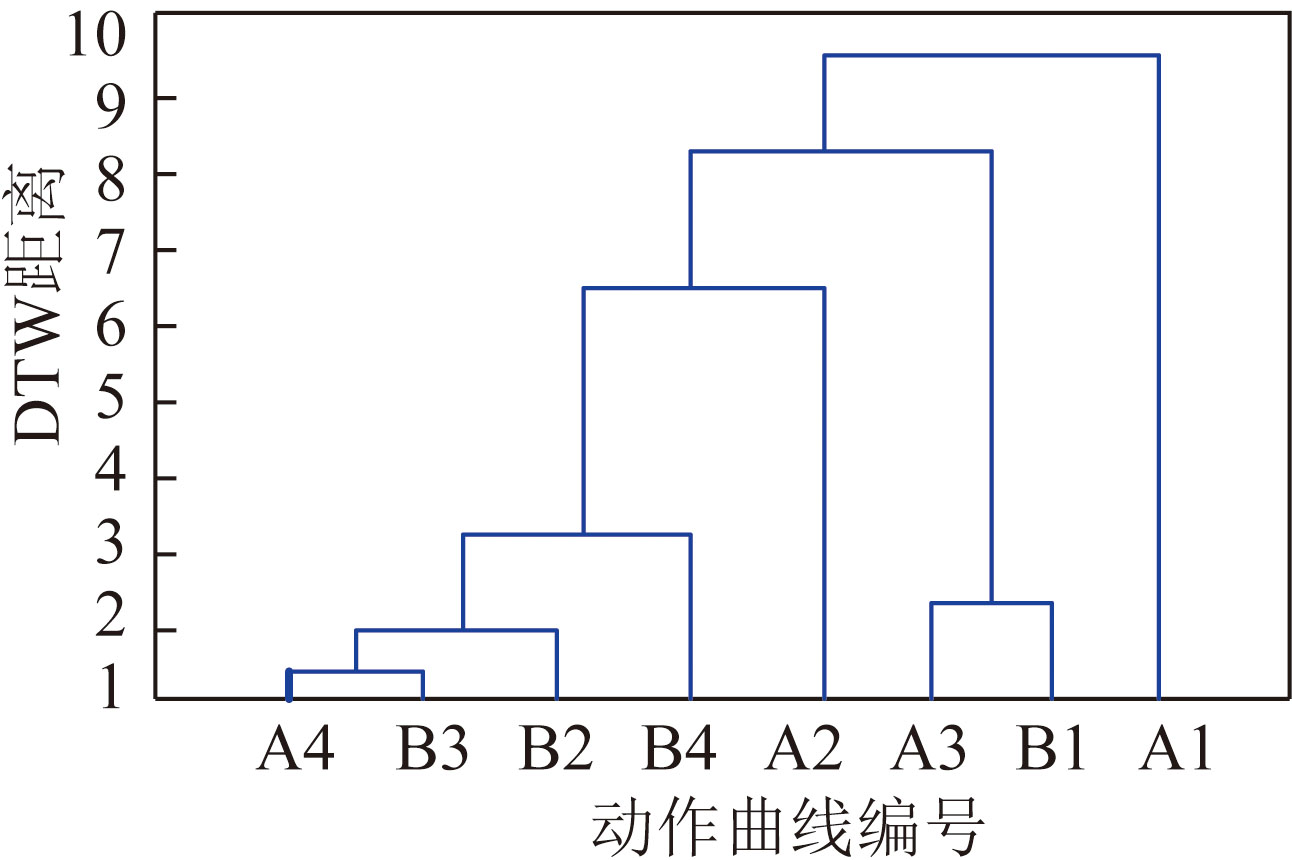
图11 油门动作曲线DTW距离聚类谱系图
Fig.11 DTW distance clustering spectrum of throttle action curve
| [1] |
|
| [2] |
|
| [3] |
ISO 17288-2: 2004.Passenger cars-free-steer behaviour-Part2:steer-pulse open-loop test method[S]. Geneva, Switzerland: International Organization for Standardization,2004.
|
| [4] |
ISO 3888-1:1999.Passenger cars-test track for a severe lane-change manoeuvre Part1:double-lane change[S]. Geneva, Switzerland: International Organization for Standardization,1999.
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
程前, 李建良. 基于改进动态时间规整的相似性度量及轨迹聚类[J]. 电子测量技术, 2021, 44(23):1-5.
|
|
|
|
| [15] |
邓青, 薛青, 罗佳. 基于支持向量机的坦克驾驶模拟训练结果分析[J]. 兵工学报, 2019, 40(9):1953-1960.
doi: 10.3969/j.issn.1000-1093.2019.09.021 |
|
doi: 10.3969/j.issn.1000-1093.2019.09.021 |
|
| [16] |
|
| [17] |
郭沐锋, 彭文成, 李平华. 某型坦克驾驶教练车在役考核指标体系研究[J]. 工程与试验, 2022, 62(3):40-42.
|
|
|
|
| [18] |
郭孔辉, 金凌鸽, 曹宇, 等. 车辆操纵稳定性客观评价指标的降维处理[J]. 汽车技术, 2010(2):1-4.
|
|
|
|
| [19] |
刘义乐, 刘峻岩. 坦克驾驶协同动作模式表示与匹配方法[J]. 装甲兵工程学院学报, 2019, 33(3):63-67.
|
|
|
|
| [20] |
|
| [21] |
龚诗雄, 王旭, 孔国杰, 等. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10):2429-2442.
|
|
doi: 10.12382/bgxb.2021.0462 |
|
| [22] |
|
| [23] |
李正欣, 张凤鸣, 李克武, 等. 一种支持DTW距离的多元时间序列索引结构[J]. 软件学报, 2014, 25(3):560-575.
|
|
|
|
| [24] |
|
| [25] |
刘美, 王全民. 基于DTW的时间序列相似度量方法的优化[J]. 计算机与数字工程, 2023, 51(4):814-819,938.
|
|
|
|
| [26] |
杨雄, 郭佳豪, 方鑫, 等. 基于改进动态时间规整算法的终端波形比对方法[J]. 电子测量技术, 2023, 46(6):178-184.
|
|
|
|
| [27] |
陈乾, 胡谷雨. 一种新的DTW最佳弯曲窗口学习方法[J]. 计算机科学, 2012, 39(8):191-195.
|
|
|
|
| [28] |
朱洪涛, 李姗, 肖勇, 等. 基于动态时间弯曲的轨道波形匹配方法[J]. 振动与冲击, 2018, 37(11):246-251.
|
|
|
|
| [29] |
杨靖. 基于动态时间弯曲的时间序列相似性搜索技术的研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
夏磊. 基于行为识别匹配的用户日常运动检测[J]. 计算机测量与控制, 2018, 26(2):264-267.
|
|
|
|
| [33] |
马晓蒙. 基于DTW模板匹配的外骨骼机器人步态识别与预测研究[D]. 武汉: 武汉理工大学, 2019.
|
|
|
|
| [34] |
|
| [35] |
崔文锋. 智能汽车综合纵向控制的统一驾驶员模型研究[D]. 长春: 吉林大学, 2018.
|
|
|
|
| [36] |
|
| [37] |
|
| [38] |
|
| [1] | 肖子寻, 刘昊然, 陈泰然, 黄彪, 王国玉. 浅水效应对水陆两栖车辆水动力性能影响[J]. 兵工学报, 2025, 46(9): 240809-. |
| [2] | 胡据林, 何洪文, 韩雪峰. 基于微运动片段的履带式车辆多路面-三维度工况构建方法[J]. 兵工学报, 2025, 46(9): 240881-. |
| [3] | 吴靖, 林建华, 黄炅, 杨铮, 黄峰. 军用车辆广域实时成像算法及系统研究[J]. 兵工学报, 2025, 46(9): 240903-. |
| [4] | 王浩东, 马彪, 陈漫, 于亮, 谭赟璐, 刘宇键. 越野环境下履带车辆的障碍识别与可通行性分析[J]. 兵工学报, 2025, 46(9): 240981-. |
| [5] | 李文浩, 于会龙, 卢玉传, 任延飞, 席军强. 耦合上装载荷的多轴车辆动力学建模与仿真[J]. 兵工学报, 2025, 46(8): 240647-. |
| [6] | 王成, 漆一帆, 孙雪岩, 杜明刚, 边骥轩, 张鹏. 履带车辆行星式综合传动系统换挡冲击特性及影响规律[J]. 兵工学报, 2025, 46(8): 240429-. |
| [7] | 王野, 陈慧岩, 席军强, 于会龙. 水陆两栖车辆水上航行研究综述[J]. 兵工学报, 2025, 46(7): 240156-. |
| [8] | 栾可迪, 郭保桥, 魏中亮, 谷源森, 王岗亭, 邓丽莎, 陈鹏万. 装甲车辆多模态交互和环境负荷对乘员任务绩效的影响[J]. 兵工学报, 2025, 46(4): 240079-. |
| [9] | 孙楠, 张文明, 杨珏. 军用双挂汽车列车的气压制动系统建模与仿真[J]. 兵工学报, 2025, 46(4): 240145-. |
| [10] | 赵海丽, 许修常, 潘宇航. 基于改进YOLOv7-tiny的车辆目标检测算法[J]. 兵工学报, 2025, 46(4): 240393-. |
| [11] | 杜云生, 王文硕, 魏源, 陈慧岩. 无级转向履带车辆驾驶员转向操控行为建模与预测[J]. 兵工学报, 2024, 45(S2): 162-169. |
| [12] | 刘祺慧, 吴维, 潘丰. 耦合驱动的滑移转向轮式车辆模型与动态特性[J]. 兵工学报, 2024, 45(S2): 222-230. |
| [13] | 姚雨, 宋春林, 邵江琦. 无人机航拍军事车辆实时检测及定位算法[J]. 兵工学报, 2024, 45(S1): 354-360. |
| [14] | 王烨茹, 杨耿, 刘述, 许啸, 陈华杰, 秦飞巍, 徐华杰. 基于图神经网络的车辆目标遮蔽关重部位检测[J]. 兵工学报, 2024, 45(S1): 242-251. |
| [15] | 郑国峰, 万银青, 隗寒冰, 赵树恩. 非道路特种车辆耐久性载荷谱的高置信度最少采集样本量[J]. 兵工学报, 2024, 45(9): 3017-3028. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4