
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (9): 3029-3043.doi: 10.12382/bgxb.2023.0685
江腾耀, 李伟*( ), 雷昱, 胡鑫, 王伟伟
), 雷昱, 胡鑫, 王伟伟
收稿日期:2021-03-03
上线日期:2023-09-18
通讯作者:
JIANG Tengyao, LI Wei*(), LEI Yu, HU Xin, WANG Weiwei
Received:2021-03-03
Online:2023-09-18
摘要:
未来战场的高机动作战环境对自行高炮稳定跟踪系统提出了更高的性能要求,根据自行高炮稳定跟踪系统的机械结构特点,应用动量矩定理及矢量求导,基于牛顿-欧拉方法建立描述伺服电机配以减速机驱动方位炮塔和俯仰身管的多刚体动力学模型。通过对动力学模型的进一步分解,得到方位俯仰姿态角与输入力矩的关系式。综合考虑传动机构的刚度和控制对象的变惯量特性,建立载体运动姿态耦合条件下具有复杂动载荷力矩干扰的双轴稳定跟踪系统控制模型。针对结构谐振设计一种基于极点配置法和变增益加速度反馈的自整定PI控制方法与基于观测等效惯量的自整定陷波器,采用大地坐标系下的等效闭环干扰速率补偿式稳定控制策略,对该控制方法进行仿真验证。仿真结果表明:在传动机构存在连接弹性的条件下,所给出的控制方法实现了稳定误差不大于2.2×10-2mrad、正弦稳定跟踪误差不大于3.5×10-2mrad,具有良好的控制精度和抗扰动性能;在保证系统拥有较快响应速度的同时,有效抑制了伺服电机变速和稳态过程中的机械谐振,显著降低了负载力矩振荡和负载有效转矩值。
中图分类号:
江腾耀, 李伟, 雷昱, 胡鑫, 王伟伟. 自行高炮稳定跟踪系统建模与谐振抑制方法[J]. 兵工学报, 2024, 45(9): 3029-3043.
JIANG Tengyao, LI Wei, LEI Yu, HU Xin, WANG Weiwei. Modeling and Resonance Suppression Method for Stabilizing-tracking System of Self-propelled Anti-aircraft Gun[J]. Acta Armamentarii, 2024, 45(9): 3029-3043.

图1 自行高炮指向结构及其坐标示意图
Fig.1 Schematic diagram of pointing structure and its coordinate system ofself-propelled anti-aircraft gun
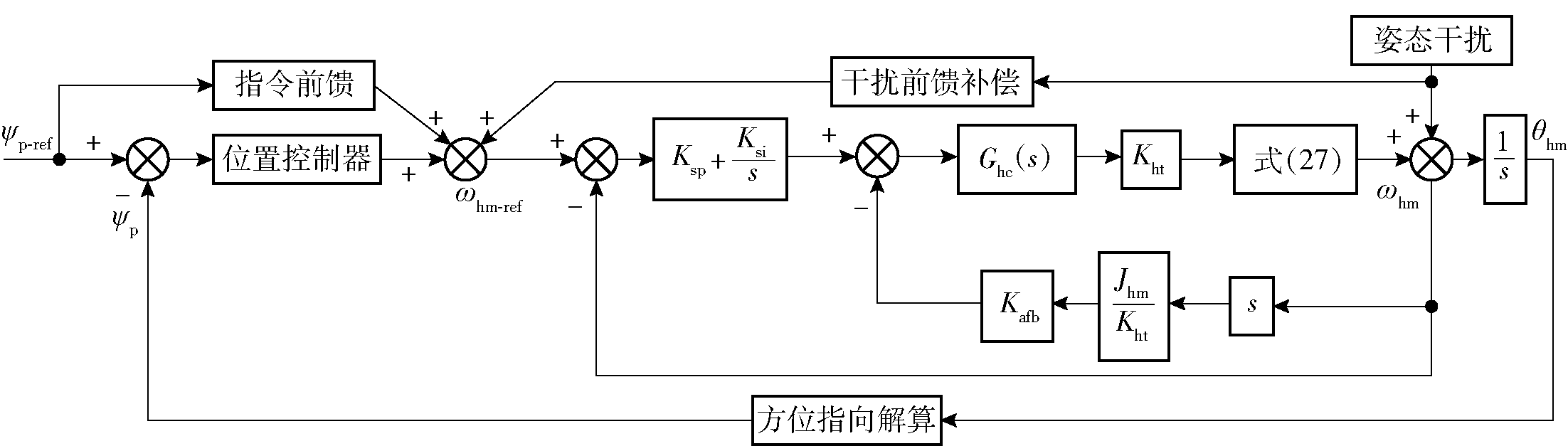
图2 自行高炮稳定跟踪系统方位向简化框图
Fig.2 Simplified azimuth block diagram of stabilizing-tracking system ofself-propelled anti-aircraft gun
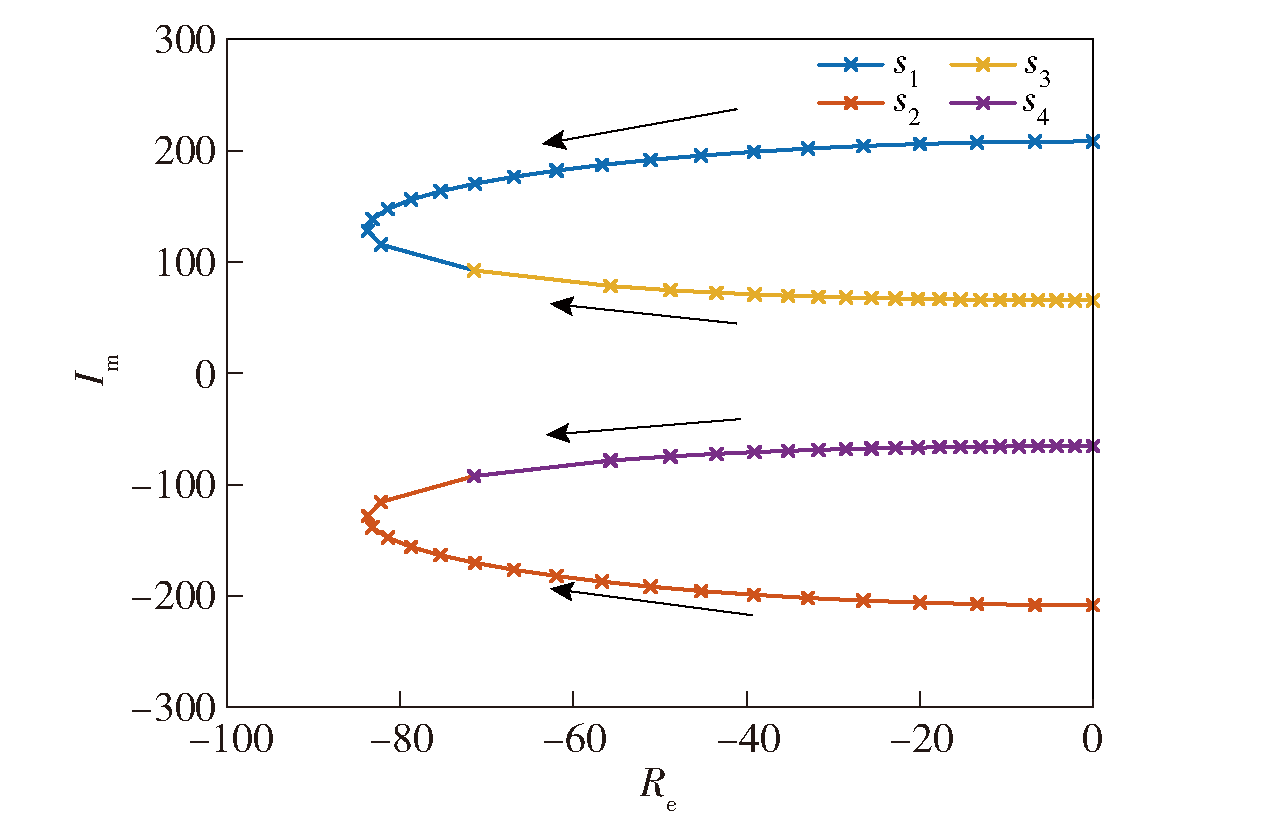
图3 极点分布图
Fig.3 Pole distribution diagram
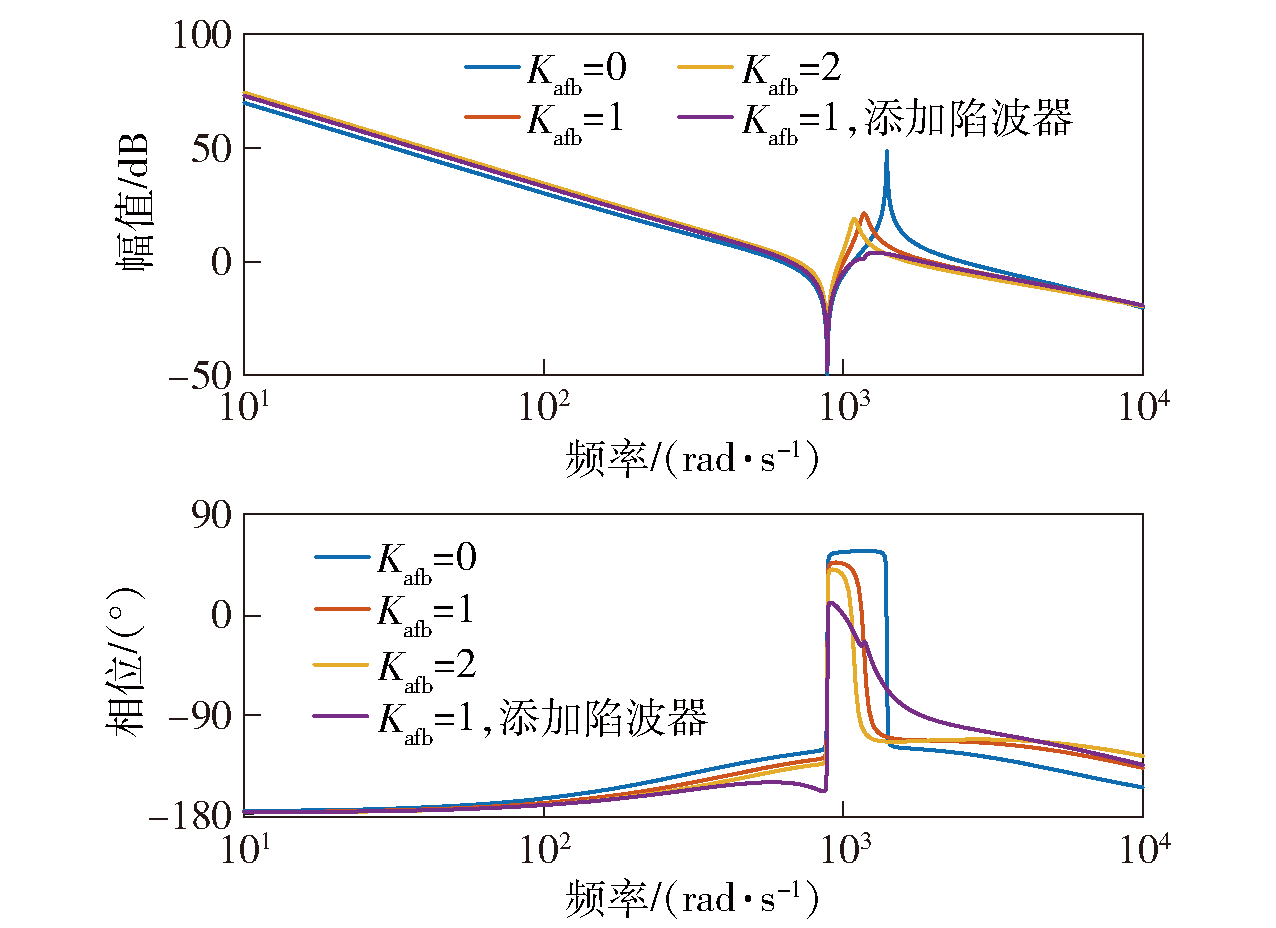
图4 速度环开环波特图
Fig.4 Open loop baud diagram of velocity loop
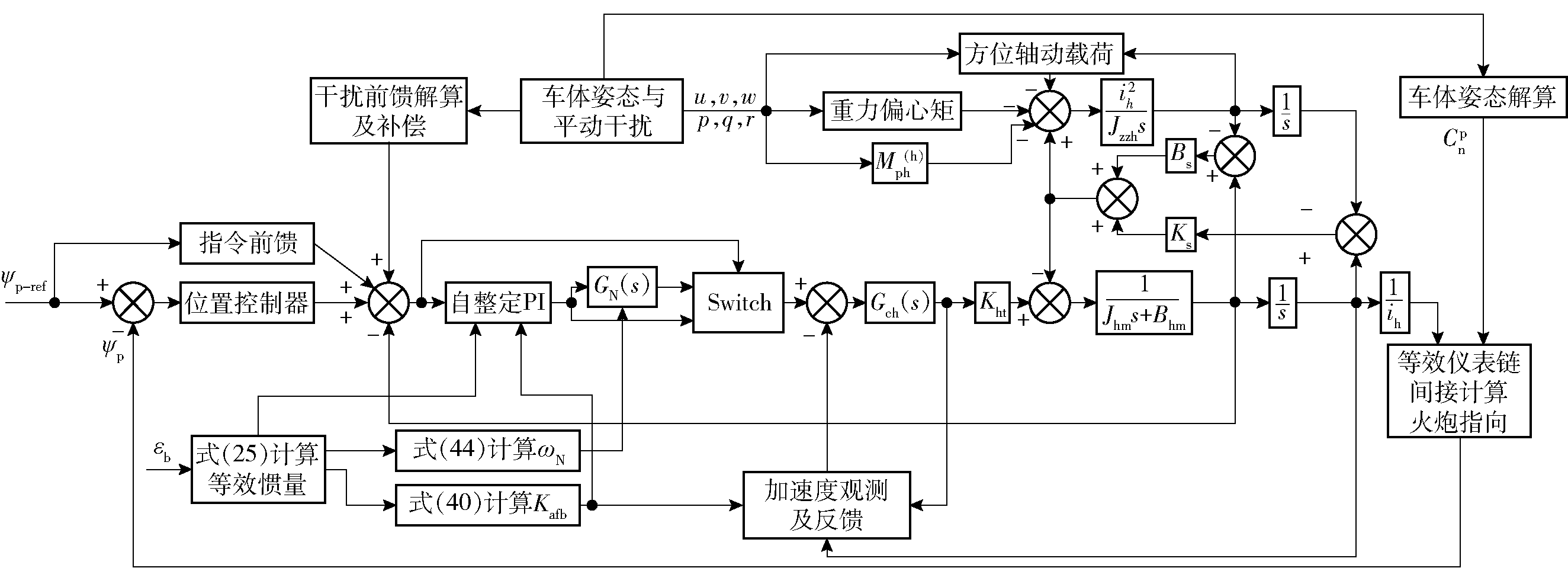
图5 自行高炮稳定跟踪系统方位向原理框图
Fig.5 Azimuth principle block diagram of stabilizing-tracking system
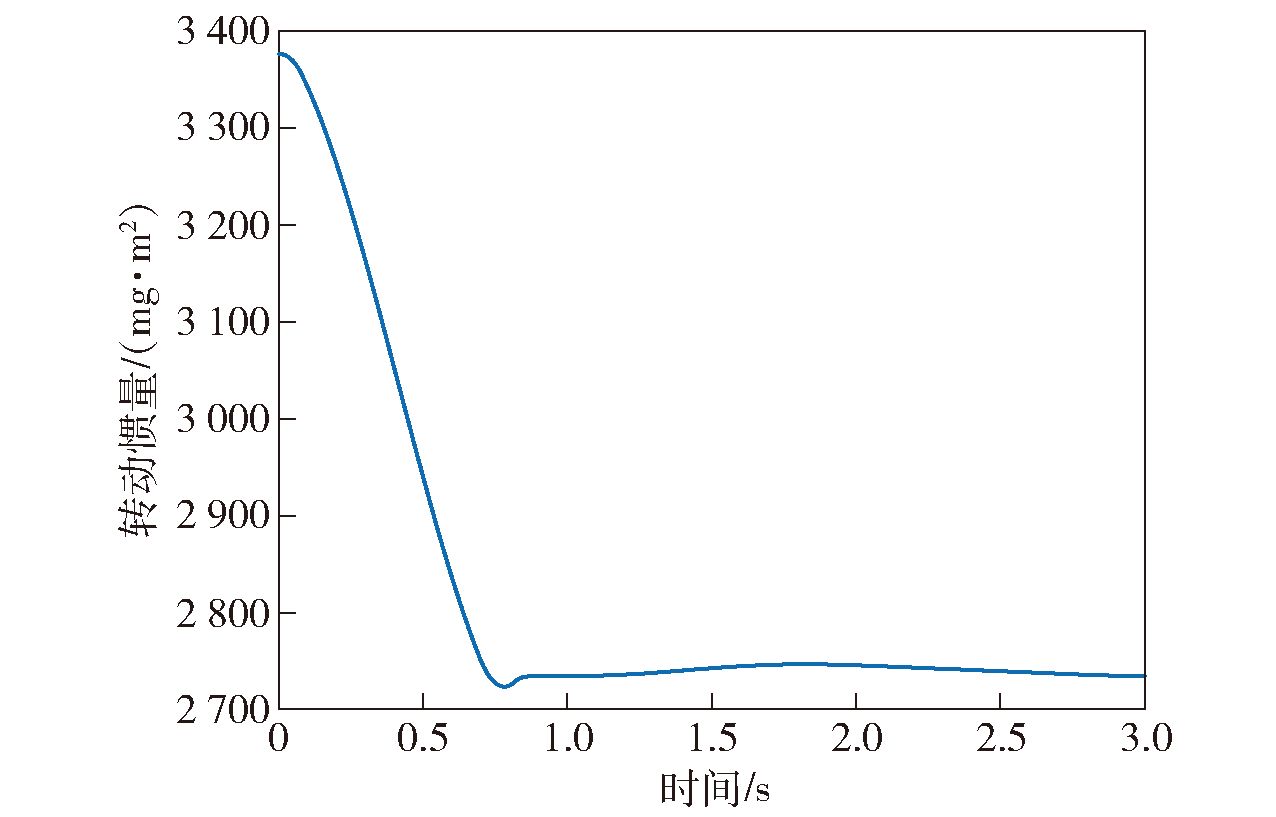
图6 方位向负载等效转动惯量曲线
Fig.6 Equivalent moment of inertia curve of azimuthal load
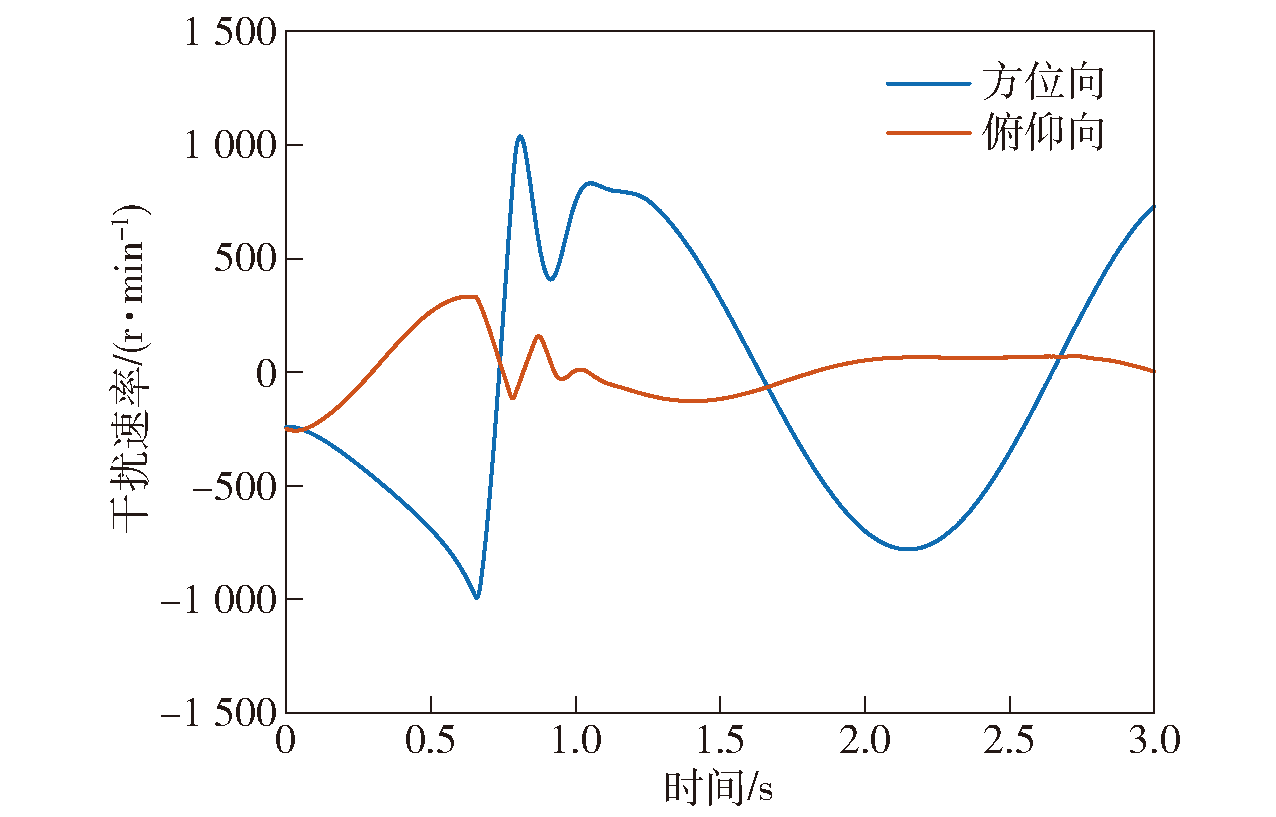
图7 干扰速率曲线
Fig.7 Interference rate curves
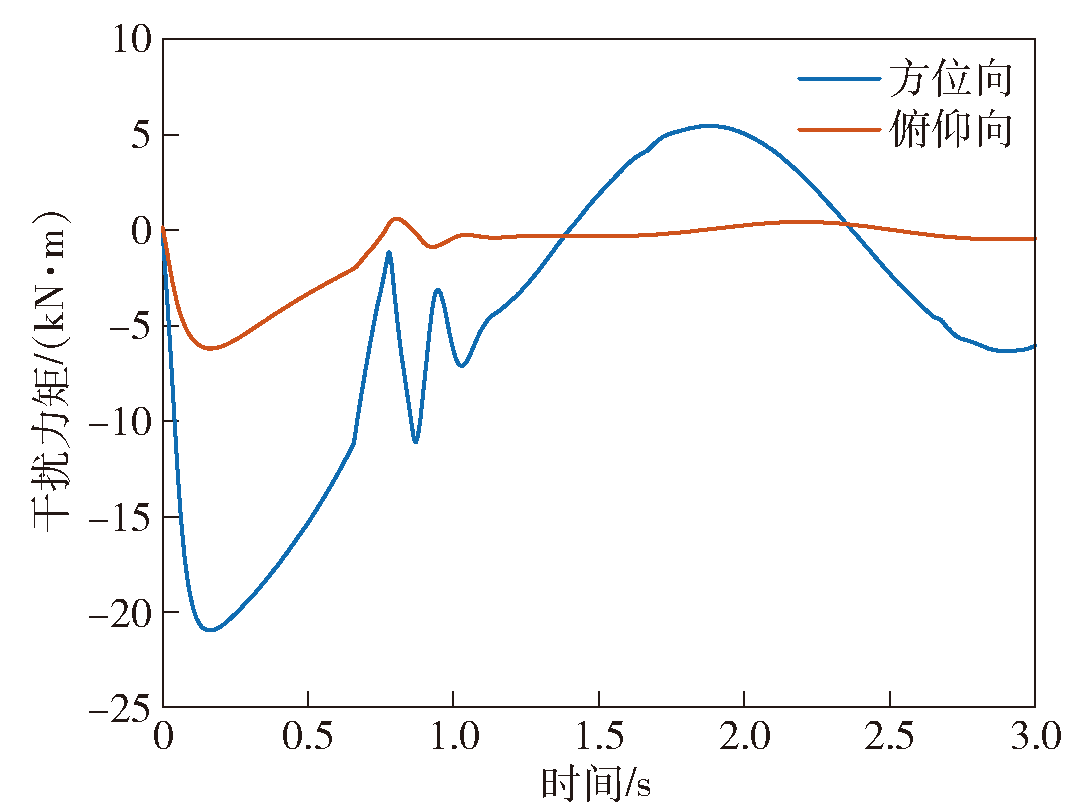
图8 干扰力矩曲线
Fig.8 Disturbance torque curves
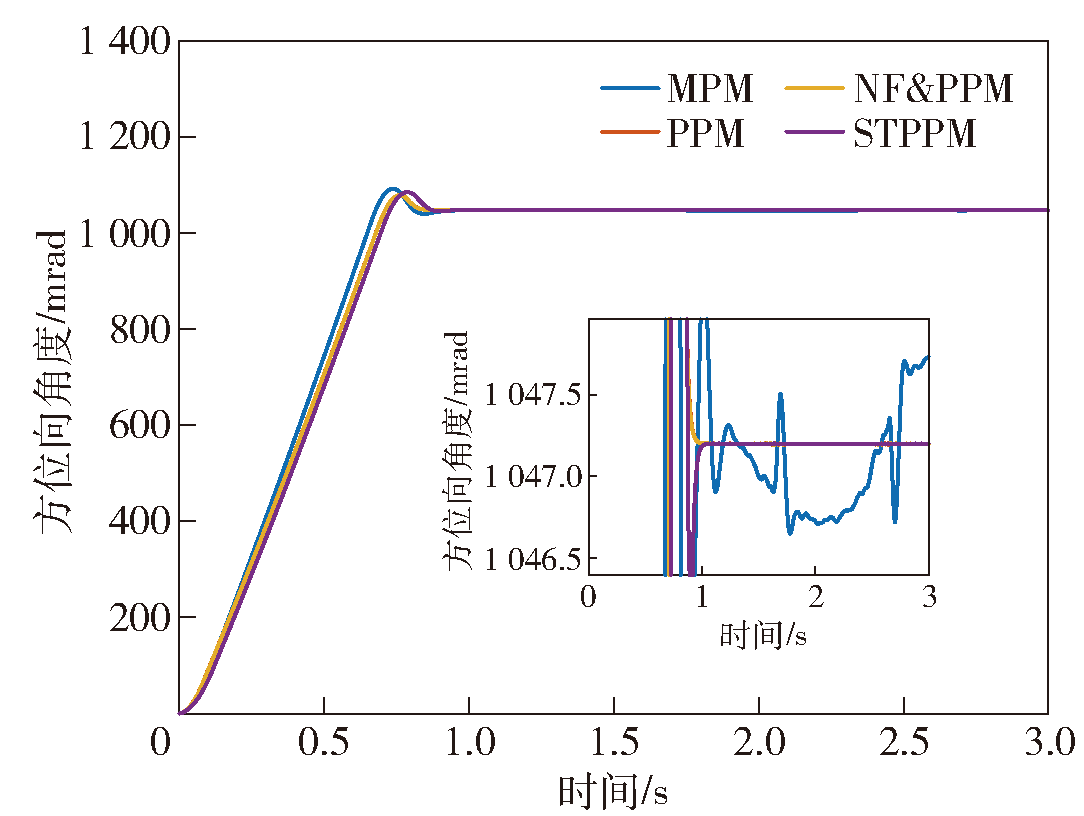
图9 方位向稳定曲线
Fig.9 Azimuth stability curves
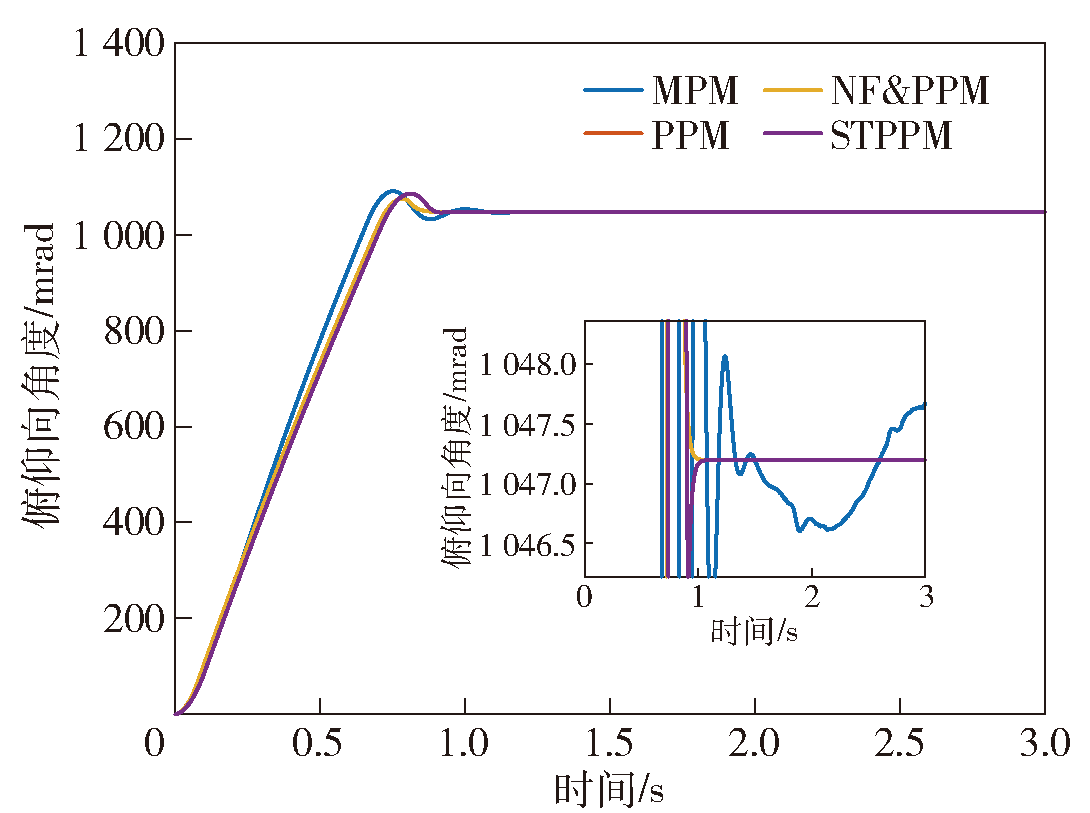
图10 俯仰向稳定曲线
Fig.10 Elevation stability curves
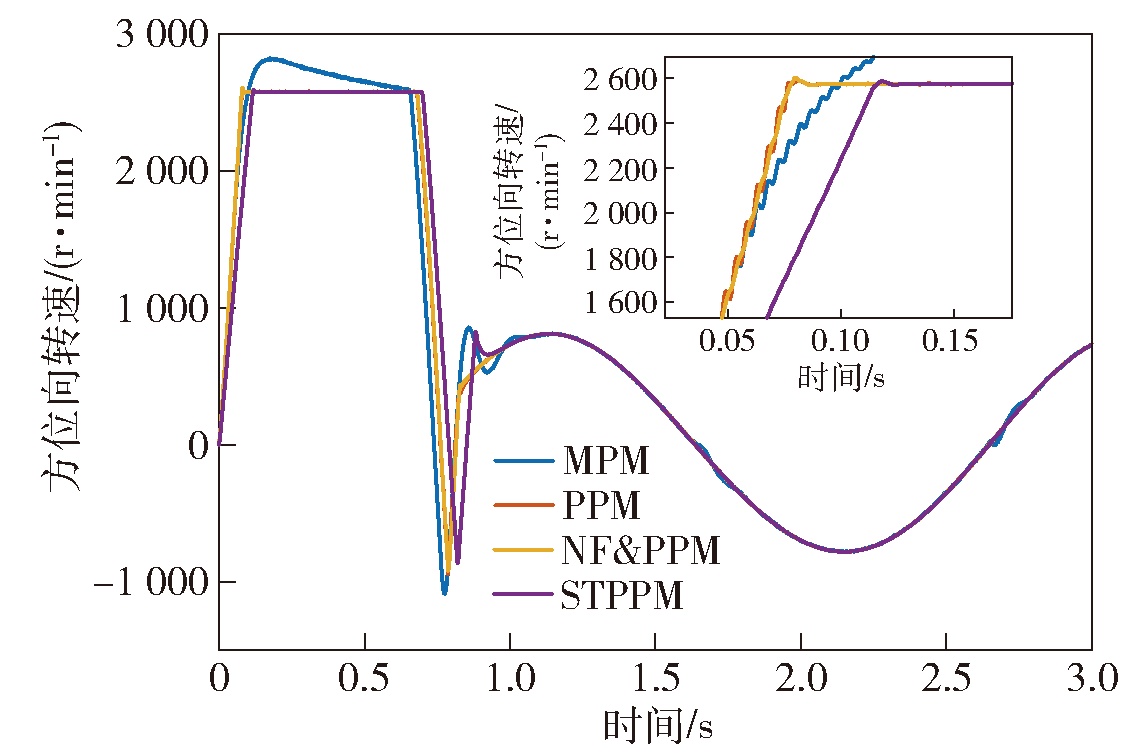
图11 方位电机转速曲线
Fig.11 Azimuth motor speed curves
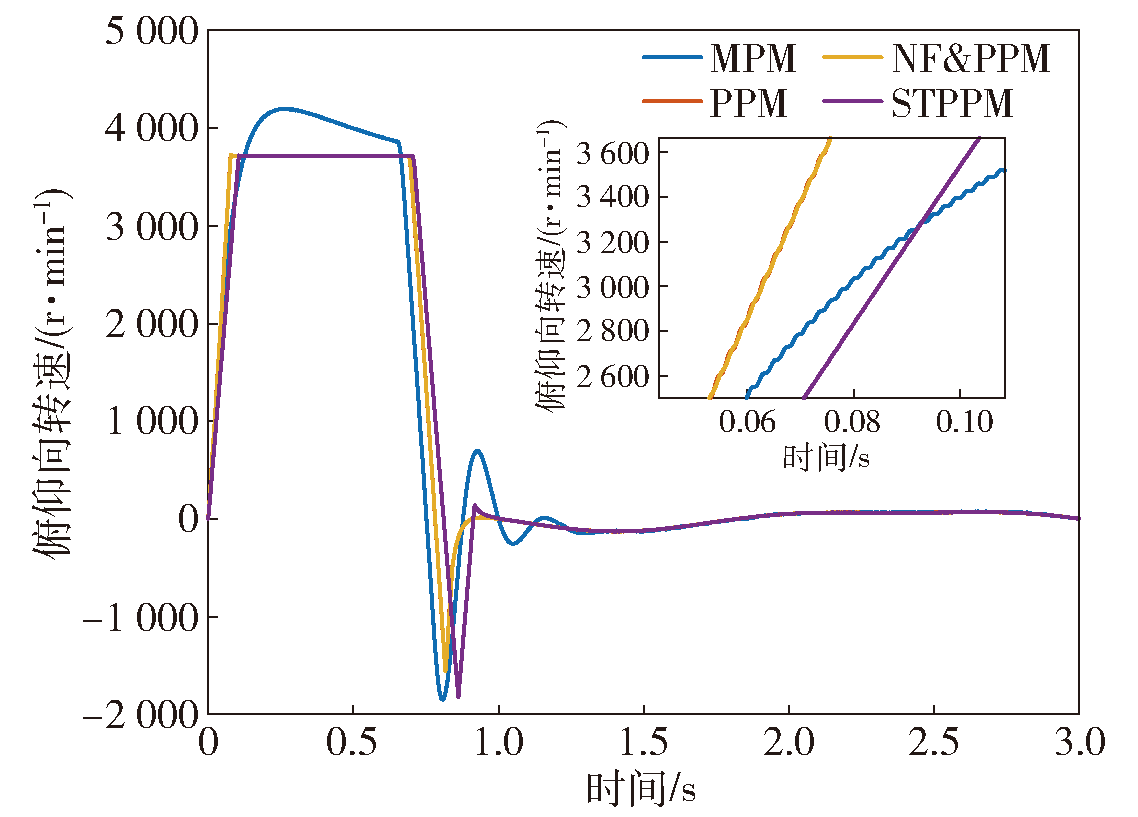
图12 俯仰电机转速曲线
Fig.12 Elevation motor speed curves
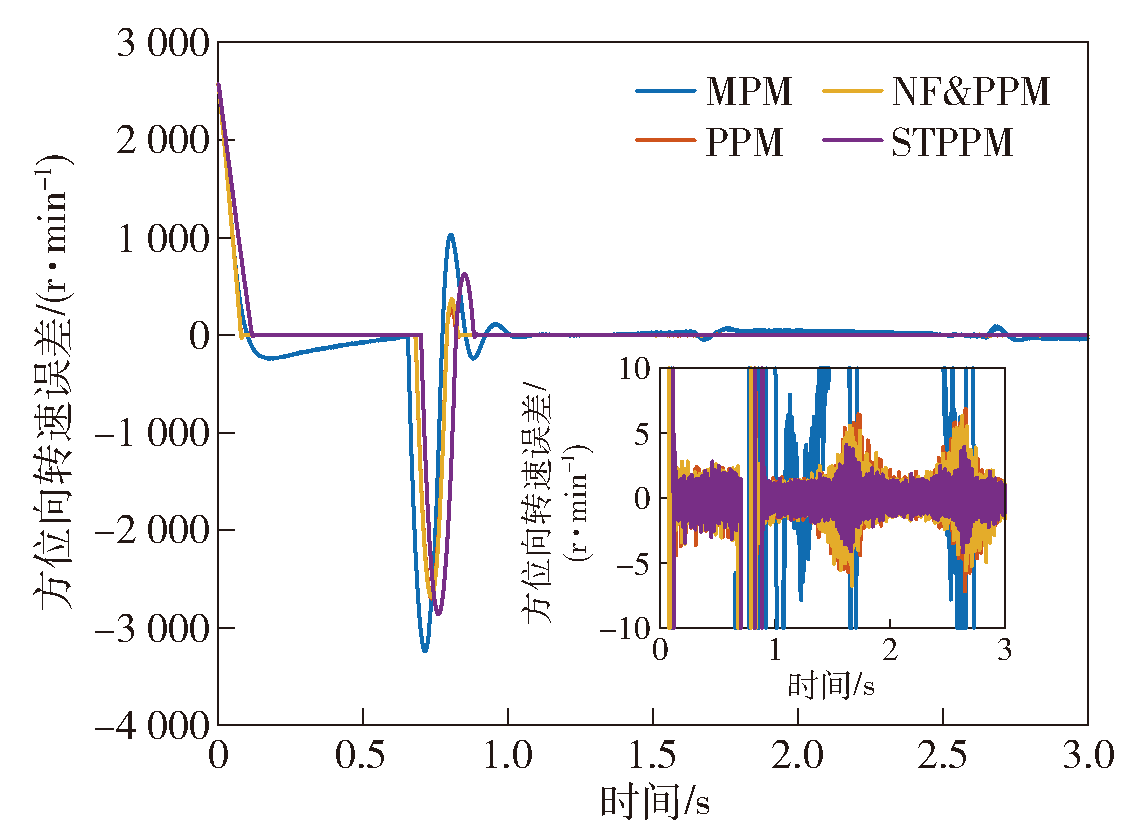
图13 方位电机转速跟踪误差曲线
Fig.13 Azimuth motor speed tracking error curves
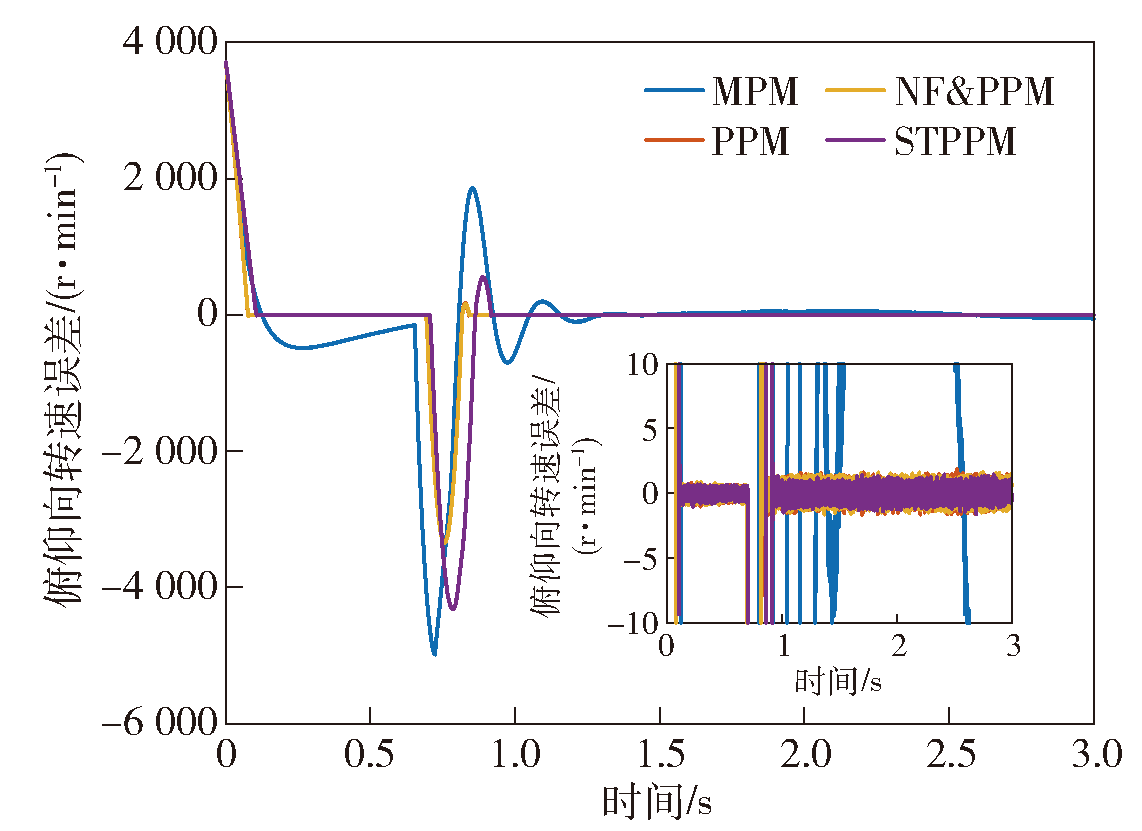
图14 俯仰电机转速跟踪误差曲线
Fig.14 Elevation motor speed tracking error curves
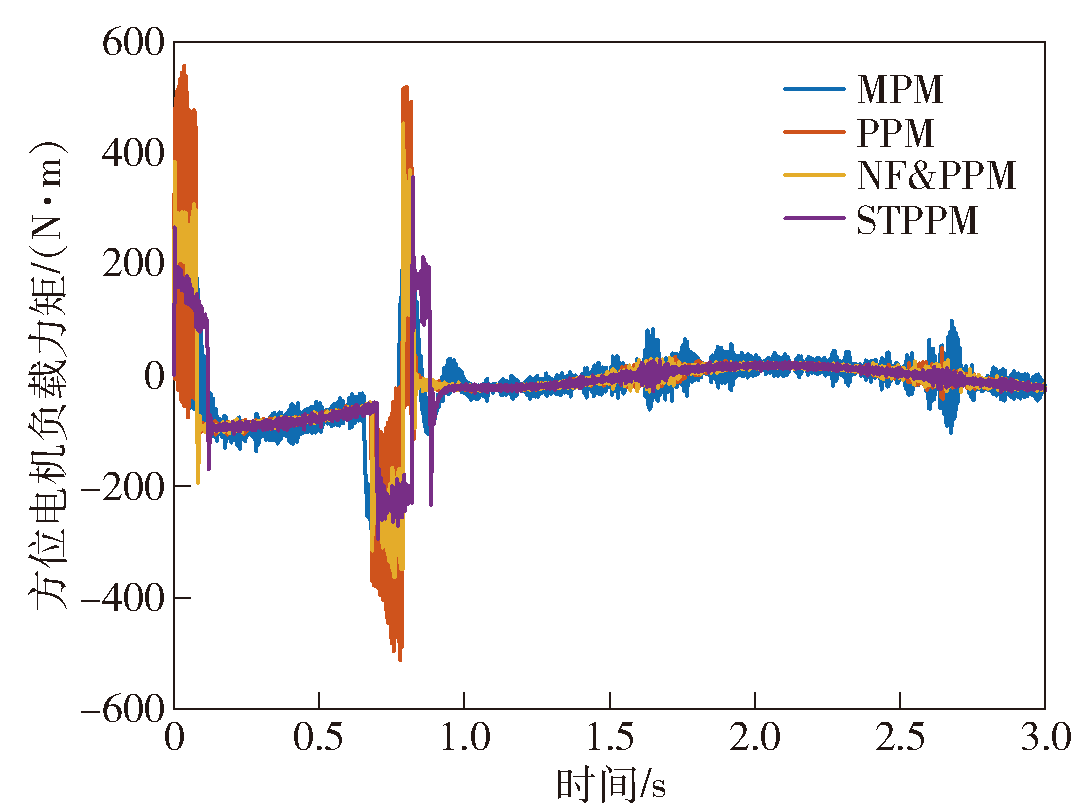
图15 方位电机负载力矩曲线
Fig.15 Azimuth motor load torque curves
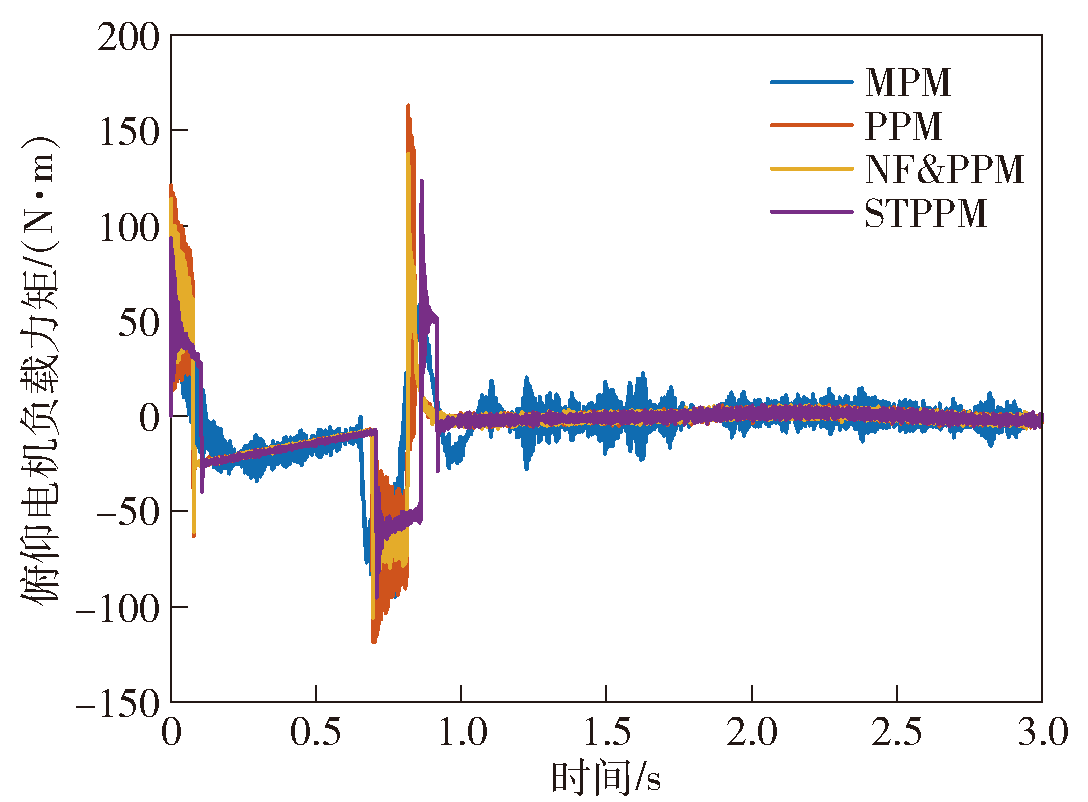
图16 俯仰电机负载力矩曲线
Fig.16 Elevation motor load torque curves
| 控制方法 | 方位向稳定误差 峰值/mrad | 俯仰向稳定误差 峰值/mrad | 方位电机转速误差均 方根值/(r·min-1) | 俯仰电机转速误差均 方根值/(r·min-1) | 方位向负载均 方根力矩/(N·m) | 俯仰向负载均 方根力矩/(N·m) |
|---|---|---|---|---|---|---|
| MPM | 0.51 | 0.84 | 30.63 | 73.01 | 82.97 | 20.63 |
| PPM | 4.13×10-2 | 3.58×10-2 | 1.22 | 0.55 | 88.23 | 21.11 |
| NF&PPM | 4.13×10-2 | 3.58×10-2 | 1.22 | 0.55 | 78.36 | 19.83 |
| STPPM | 2.20×10-2 | 1.81×10-2 | 0.81 | 0.44 | 70.51 | 18.50 |
表1 4种控制方法对应的稳定控制效果对比
Table 1 Comparison of stabilizing control effects of four control methods
| 控制方法 | 方位向稳定误差 峰值/mrad | 俯仰向稳定误差 峰值/mrad | 方位电机转速误差均 方根值/(r·min-1) | 俯仰电机转速误差均 方根值/(r·min-1) | 方位向负载均 方根力矩/(N·m) | 俯仰向负载均 方根力矩/(N·m) |
|---|---|---|---|---|---|---|
| MPM | 0.51 | 0.84 | 30.63 | 73.01 | 82.97 | 20.63 |
| PPM | 4.13×10-2 | 3.58×10-2 | 1.22 | 0.55 | 88.23 | 21.11 |
| NF&PPM | 4.13×10-2 | 3.58×10-2 | 1.22 | 0.55 | 78.36 | 19.83 |
| STPPM | 2.20×10-2 | 1.81×10-2 | 0.81 | 0.44 | 70.51 | 18.50 |
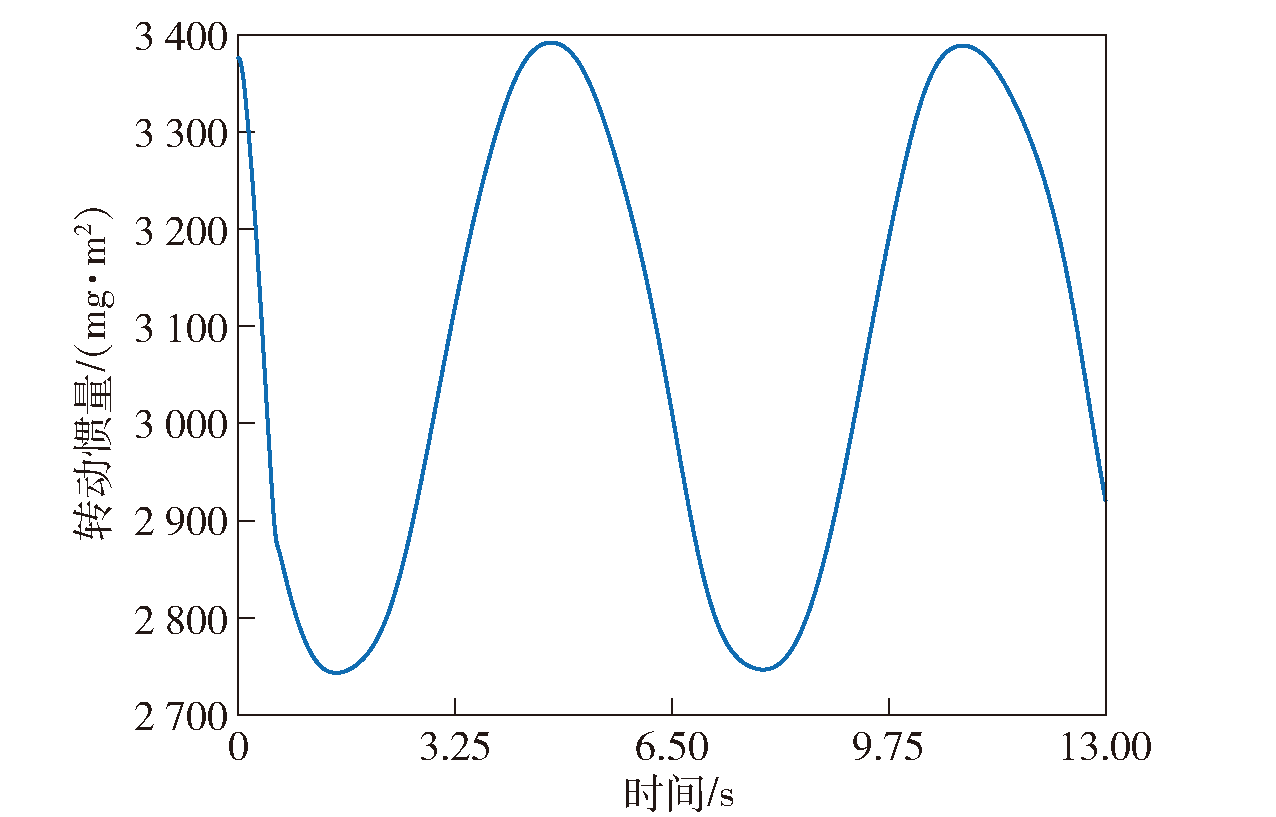
图17 方位负载等效转动惯量曲线
Fig.17 Equivalent moment of inertia curve of azimuthal load
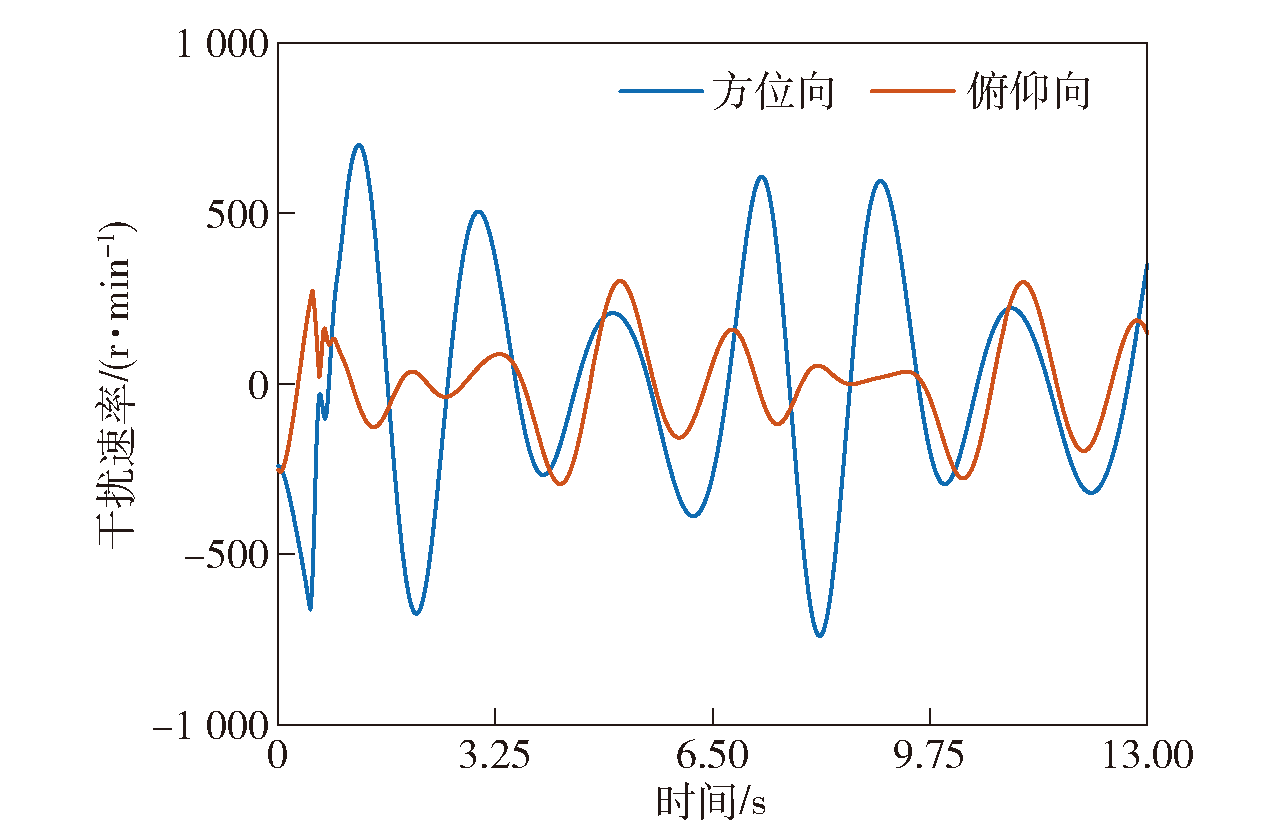
图18 干扰速率曲线
Fig.18 Interference rate curves
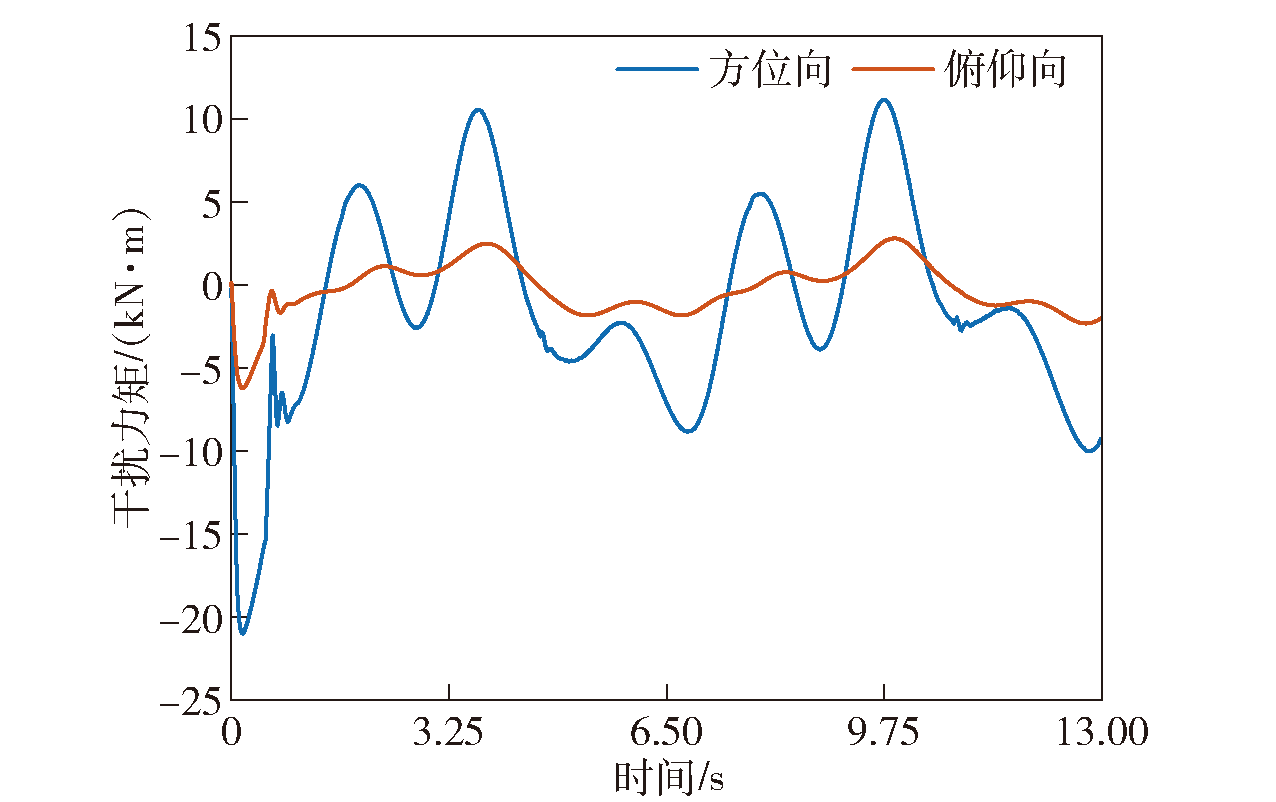
图19 干扰力矩曲线
Fig.19 Disturbance torque curves
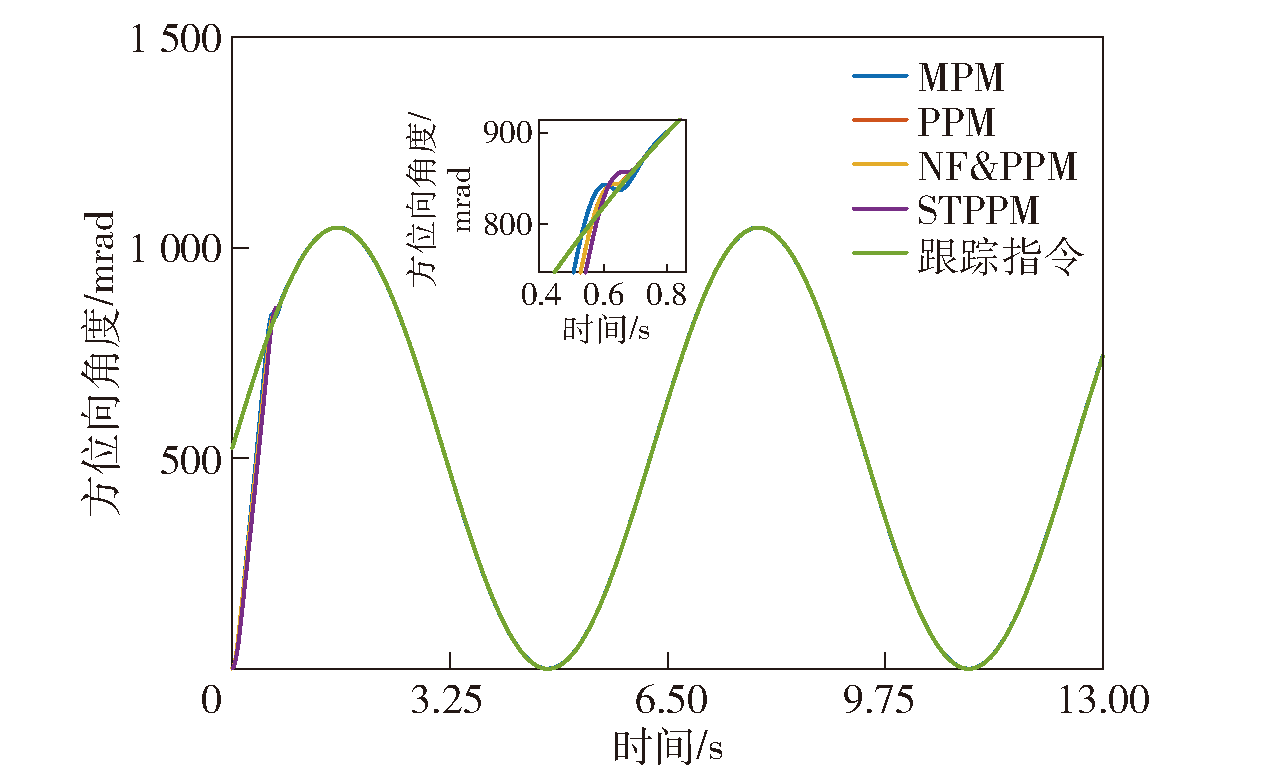
图20 方位向稳定跟踪曲线
Fig.20 Azimuth stabilizing-tracking curves
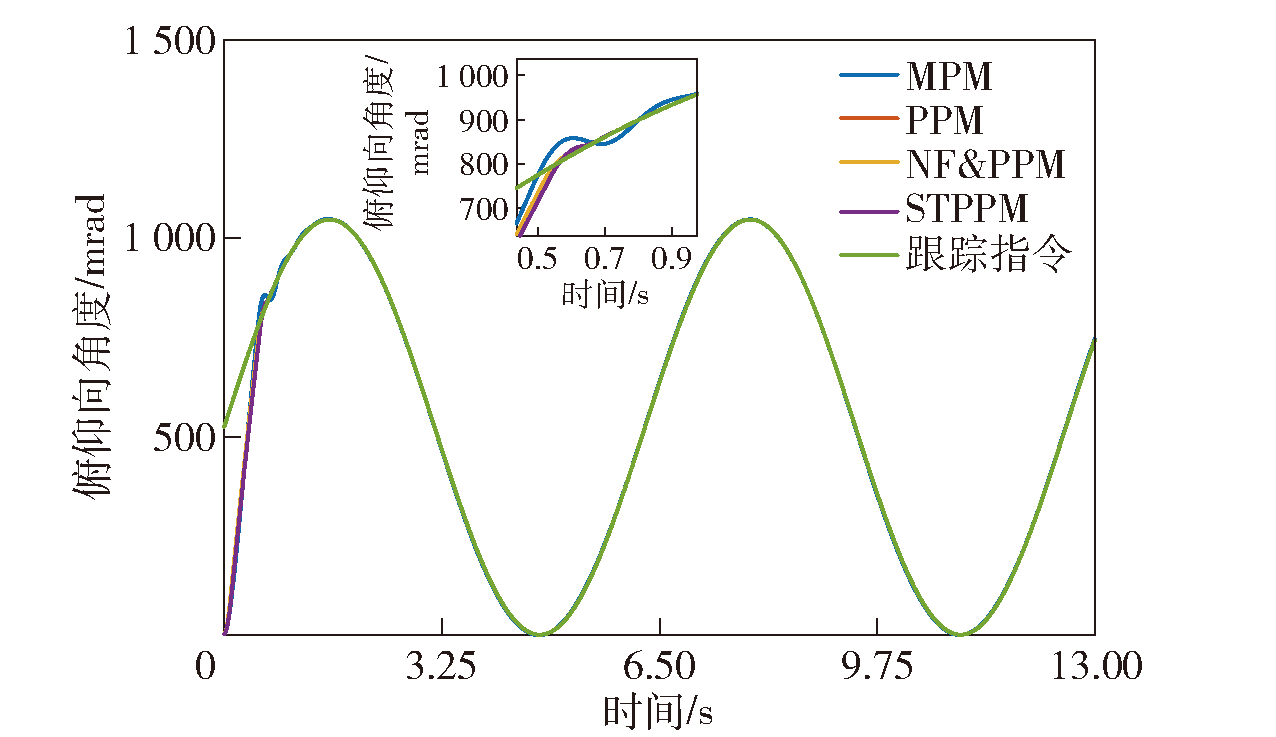
图21 俯仰向稳定跟踪曲线
Fig.21 Elevation stabilizing-tracking curves
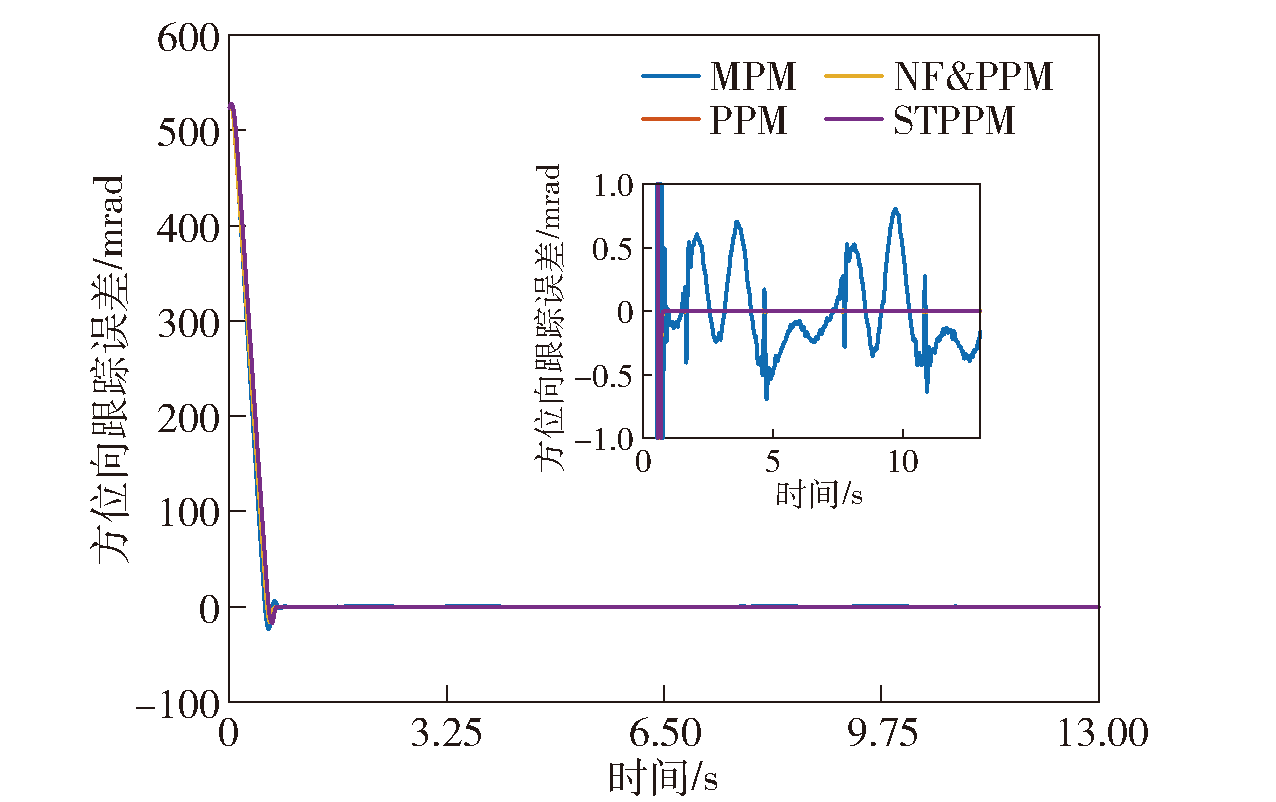
图22 方位向稳定跟踪误差曲线
Fig.22 Azimuth stabilizing-tracking error curves
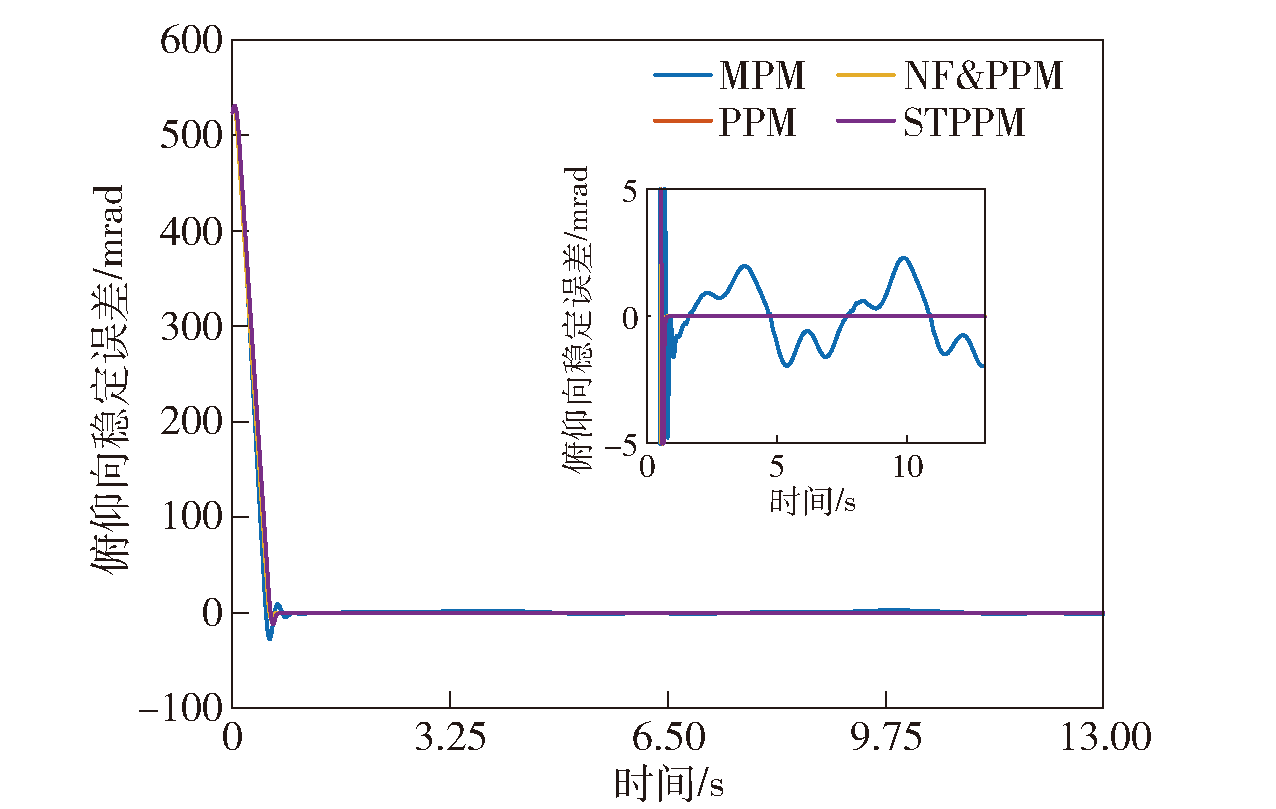
图23 俯仰向稳定跟踪误差曲线
Fig.23 Elevation stabilizing-tracking error curves
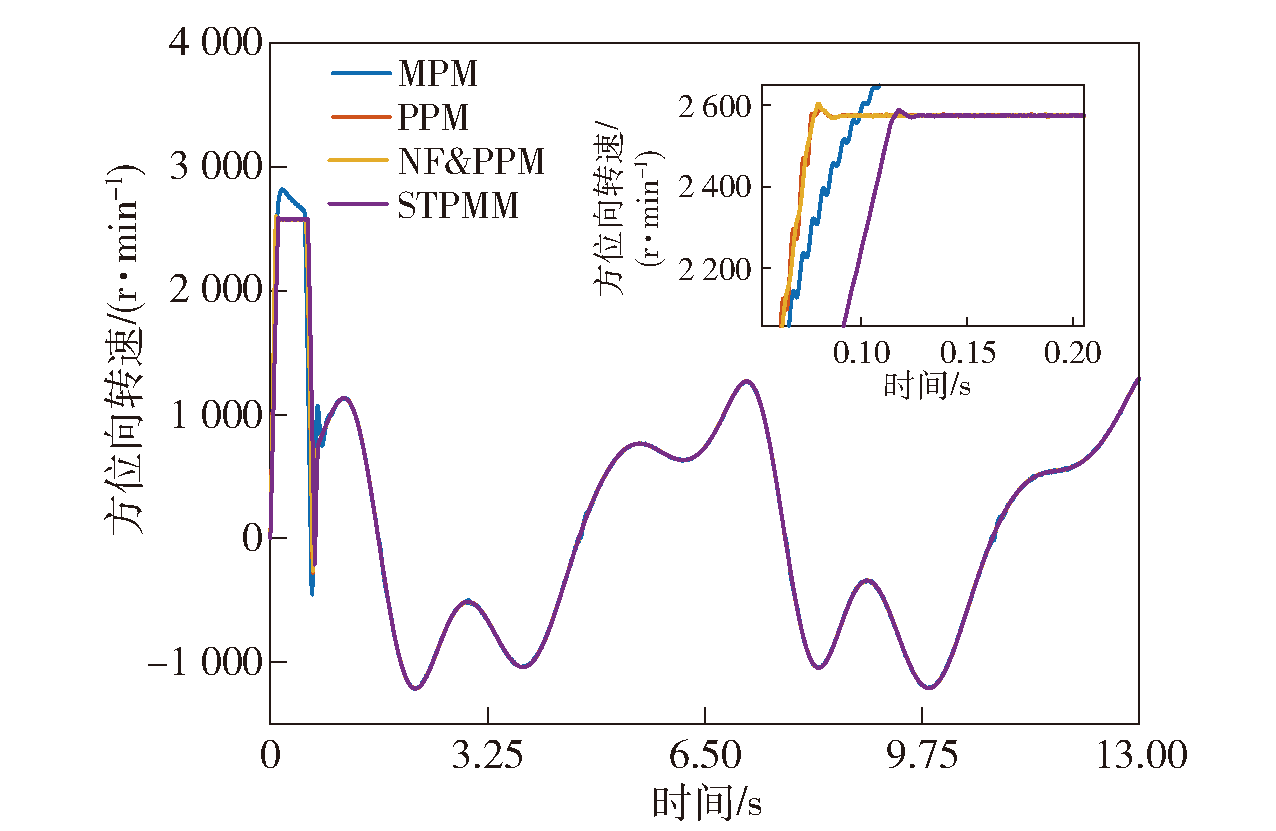
图24 方位电机转速曲线
Fig.24 Azimuth motor speed curves
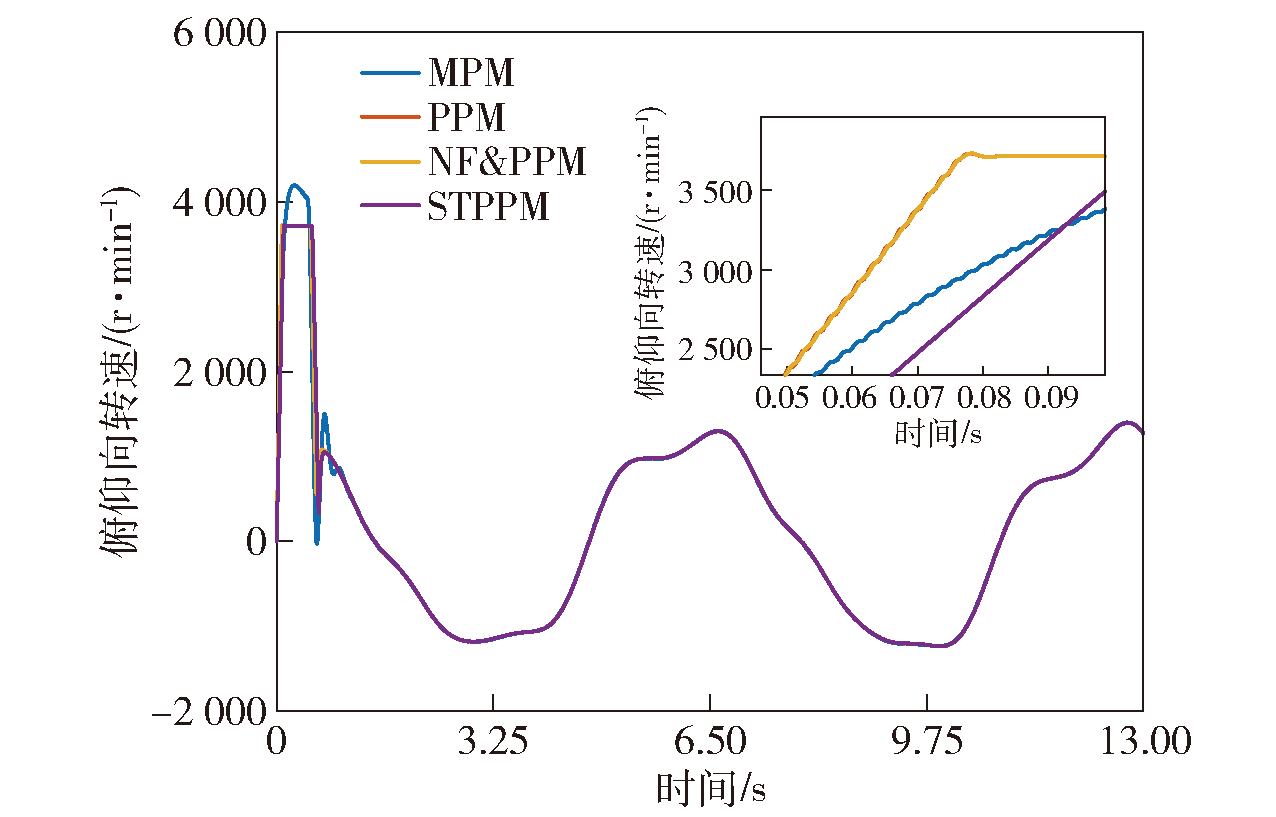
图25 俯仰电机转速曲线
Fig.25 Elevation motor speed curves
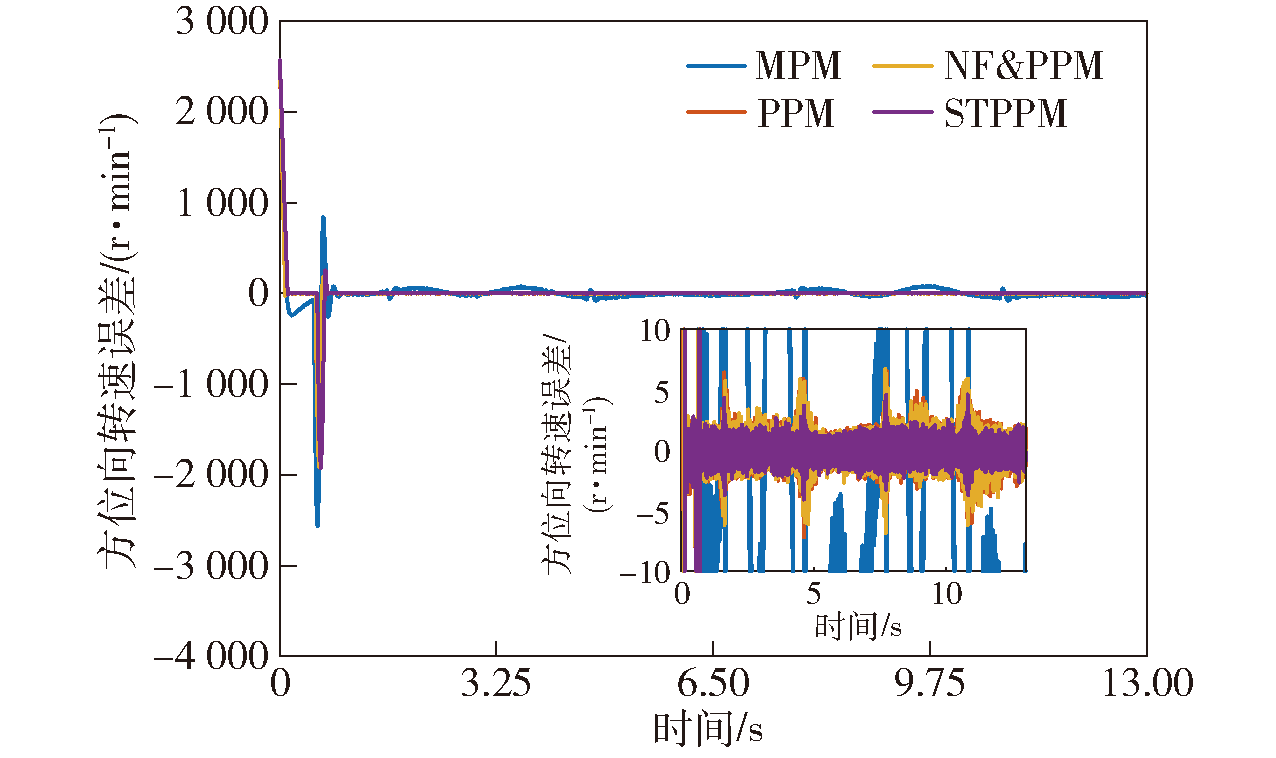
图26 方位电机转速跟踪误差曲线
Fig.26 Azimuth motor speed tracking error curves
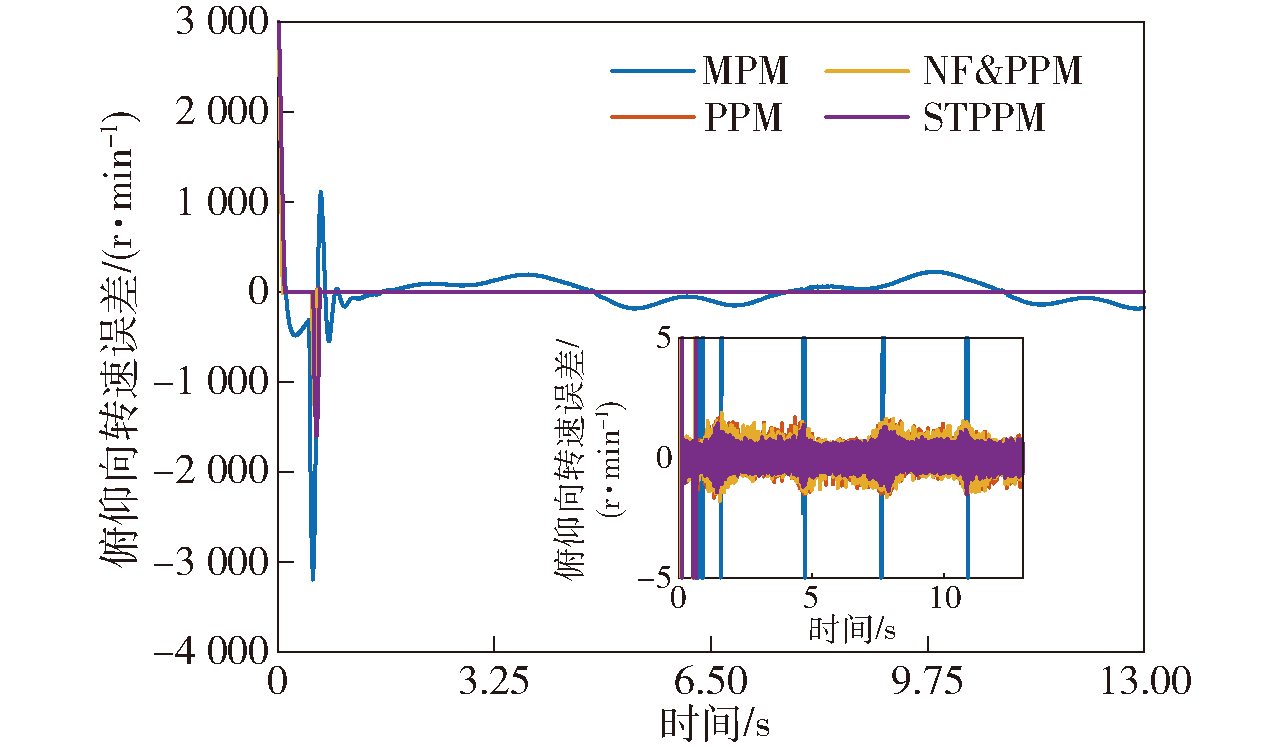
图27 俯仰电机转速跟踪误差曲线
Fig.27 Elevation motor speed tracking error curves
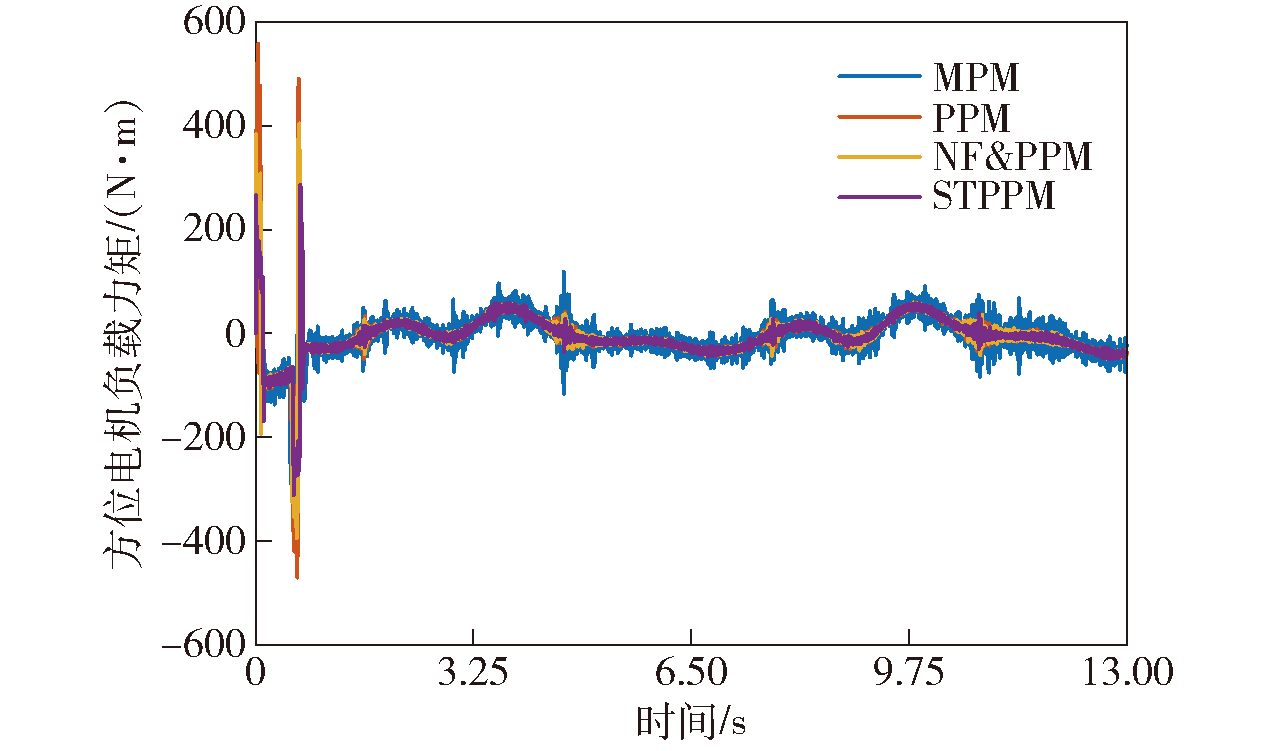
图28 方位电机负载力矩曲线
Fig.28 Azimuth motor load torque curves
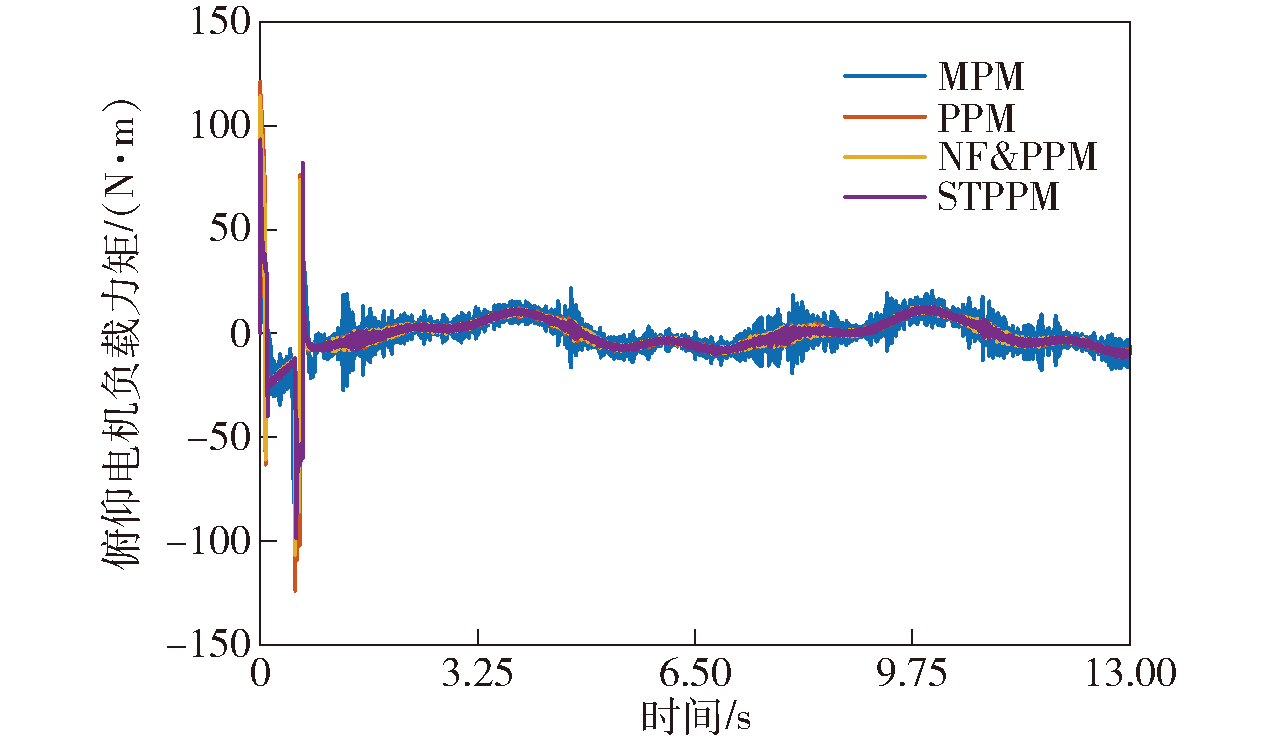
图29 俯仰电机负载力矩曲线
Fig.29 Elevation motor load torque curves
| 控制方法 | 方位向稳定误差 峰值/mrad | 俯仰向稳定误差 峰值/mrad | 方位电机转速误差均 方根值/(r·min-1) | 俯仰电机转速误差均 方根值/(r·min-1) | 方位向负载均 方根力矩/(N·m) | 俯仰向负载均 方根力矩/(N·m) |
|---|---|---|---|---|---|---|
| MPM | 0.92 | 1.96 | 33.13 | 114.19 | 46.02 | 10.31 |
| PPM | 5.71×10-2 | 4.52×10-2 | 1.39 | 0.85 | 45.28 | 10.07 |
| NF&PPM | 5.71×10-2 | 4.52×10-2 | 1.39 | 0.85 | 42.33 | 9.74 |
| STPPM | 3.49×10-2 | 2.57×10-2 | 0.91 | 0.63 | 38.89 | 9.18 |
表2 4种控制方法对应的稳定跟踪控制效果对比
Table 2 Comparison of stabilizing-tracking control effects of four control methods
| 控制方法 | 方位向稳定误差 峰值/mrad | 俯仰向稳定误差 峰值/mrad | 方位电机转速误差均 方根值/(r·min-1) | 俯仰电机转速误差均 方根值/(r·min-1) | 方位向负载均 方根力矩/(N·m) | 俯仰向负载均 方根力矩/(N·m) |
|---|---|---|---|---|---|---|
| MPM | 0.92 | 1.96 | 33.13 | 114.19 | 46.02 | 10.31 |
| PPM | 5.71×10-2 | 4.52×10-2 | 1.39 | 0.85 | 45.28 | 10.07 |
| NF&PPM | 5.71×10-2 | 4.52×10-2 | 1.39 | 0.85 | 42.33 | 9.74 |
| STPPM | 3.49×10-2 | 2.57×10-2 | 0.91 | 0.63 | 38.89 | 9.18 |
| [1] |
doi: S0019-0578(16)30020-9 pmid: 27016450 |
| [2] |
|
| [3] |
方宇超, 李梦雪, 车英. 基于自抗扰控制的光电平台视轴稳定技术研究[J]. 红外与激光工程, 2018, 47(3):234-242.
|
|
|
|
| [4] |
|
| [5] |
姜尚, 田福庆, 梁伟阁. 基于全局反步滑模控制的舰炮随动系统齿隙补偿方法[J]. 海军工程大学学报, 2018, 30(5):92-98.
|
|
|
|
| [6] |
田楠, 李勇, 王凯, 等. 某航炮高吸能变刚度缓冲装置动力学特性研究[J]. 兵器装备工程学报, 2022, 43(4):92-98.
|
|
|
|
| [7] |
李长兵, 袁东, 马晓军, 等. 高速机动条件下坦克火炮系统扰动力矩谱研究[J]. 兵工学报, 2015, 36(4):582-589.
doi: 10.3969/j.issn.1000-1093.2015.04.002 |
|
|
|
| [8] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7):1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [9] |
|
| [10] |
doi: 10.1016/j.isatra.2022.05.011 pmid: 35644679 |
| [11] |
姜俊峰, 李伟, 赵维, 等. 船载转塔装置随动系统动力学建模与仿真[J]. 兵工学报, 2019, 40(4):829-836.
doi: 10.3969/j.issn.1000-1093.2019.04.018 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.018 |
|
| [12] |
李伟, 韩崇伟, 张太平, 等. 自行高炮射击线稳定系统动力学建模与仿真[J]. 兵工学报, 2013, 34(10):1201-1208.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 001 |
|
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 001 |
|
| [13] |
李伟, 韩崇伟, 刘爱峰, 等. 干扰速率补偿式火炮线自稳定跟踪控制建模与仿真[J]. 兵工学报, 2022, 43(6):1233-1245.
doi: 10.12382/bgxb.2021.0295 |
|
doi: 10.12382/bgxb.2021.0295 |
|
| [14] |
李伟, 姜俊峰, 任海波, 等. 行进间火炮指向稳定跟踪系统建模与控制[J]. 兵工学报, 2018, 39(8):1479-1490.
doi: 10.3969/j.issn.1000-1093.2018.08.004 |
|
doi: 10.3969/j.issn.1000-1093.2018.08.004 |
|
| [15] |
吴晗平, 易新建, 杨坤涛. 机械结构因素对光电跟踪伺服系统性能的影响[J]. 应用光学, 2004, 25(3):11-14.
|
|
|
|
| [16] |
陈明俊, 李长红, 杨燕. 武器伺服系统工程实践[M]. 北京: 国防工业出版社,2013:18-21.
|
|
|
|
| [17] |
|
| [18] |
丁有爽, 肖曦. 基于极点配置的永磁同步电机驱动柔性负载PI调节器参数确定方法[J]. 中国电机工程学报, 2017, 37(4):1225-1239.
|
|
|
|
| [19] |
丁有爽, 肖曦. 永磁同步电机直接驱动柔性负载控制方法[J]. 电工技术学报, 2017, 32(4):123-132.
|
|
|
|
| [20] |
闵溢龙, 王淦泉. 高精度低连接刚度大惯量扫描镜控制系统设计[J]. 宇航学报, 2021, 42(2):220-229.
|
|
|
|
| [21] |
|
| [22] |
刘延柱, 潘振宽, 戈新生. 多体系统动力学[M]. 第2版. 北京: 高等教育出版社,2014:33-36.
|
|
|
|
| [23] |
李长红, 陈明俊, 韩耀鹏. 基于相位裕度的永磁同步电机位置伺服系统研究[J]. 电气传动, 2014, 44(10):54-59.
|
|
|
| [1] | 任晓磊, 刘辉, 韩立金, 陈前, 聂士达, 谢景硕, 崔山. 复杂地形下轮腿复合机动平台动态运动控制[J]. 兵工学报, 2024, 45(9): 2993-3003. |
| [2] | 赵猛, 戴开达, 向召, 姜涛, 赵晓松, 徐豫新. 近爆荷载下聚氯乙烯泡沫夹芯板的动力学模型研究[J]. 兵工学报, 2023, 44(12): 3884-3896. |
| [3] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [4] | 李伟, 韩崇伟, 刘爱峰, 任海波, 胡鑫, 姜俊峰. 干扰速率补偿式火炮线自稳定跟踪控制建模与仿真[J]. 兵工学报, 2022, 43(6): 1233-1245. |
| [5] | 钱林方, 陈光宋, 林通, 刘太素. 车载炮底盘载荷分离设计技术[J]. 兵工学报, 2022, 43(11): 2773-2784. |
| [6] | 孙国轩, 宫新宇, 时岩, 谢继鹏, 鲁斌. 基于差分进化算法的自行高炮随动系统PID参数整定[J]. 兵工学报, 2021, 42(5): 903-912. |
| [7] | 李春明, 吴维, 郭智蔷, 苑士华, 陈思. 履带车辆纵向与垂向耦合动力学模型及功率特性[J]. 兵工学报, 2021, 42(3): 449-458. |
| [8] | 叶建川, 王江, 梁熠, 宋韬, 吴则良, 徐超. 四旋翼无人机前飞模态特性[J]. 兵工学报, 2021, 42(11): 2476-2490. |
| [9] | 张宏鹏, 黄长强, 唐上钦, 轩永波. 基于卷积神经网络的无人作战飞机飞行轨迹实时预测[J]. 兵工学报, 2020, 41(9): 1894-1903. |
| [10] | 韩晋阳, 白春华, 檀盼龙. 伞降战斗部毁伤试验落点预测方法研究[J]. 兵工学报, 2020, 41(6): 1077-1084. |
| [11] | 姜俊峰, 李伟, 赵维, 周晓军. 船载转塔装置随动系统动力学建模与仿真[J]. 兵工学报, 2019, 40(4): 829-836. |
| [12] | 查峰, 覃方君, 李京书, 叶斌. 三轴旋转惯性导航系统的旋转控制建模研究[J]. 兵工学报, 2017, 38(8): 1610-1618. |
| [13] | 李魁武, 裴益轩, 霍勇谋. 自行高炮射击精度综合补偿技术研究[J]. 兵工学报, 2015, 36(2): 214-219. |
| [14] | 宗睿, 林德福, 范世鹏, 兰玲. 天线罩寄生回路影响与自校正控制在线补偿[J]. 兵工学报, 2015, 36(10): 1888-1898. |
| [15] | 谢润, 杨国来. 自行高炮行进间射击炮口响应特性研究[J]. 兵工学报, 2014, 35(8): 1158-1163. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4