
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (7): 2114-2121.doi: 10.12382/bgxb.2022.0290
王学敏1, 于洪波1, 张翔宇1,2, 安舒1, 李文海1,*( )
)
收稿日期:2022-04-21
上线日期:2023-07-30
通讯作者:
基金资助:
WANG Xuemin1, YU Hongbo1, ZHANG Xiangyu1,2, AN Shu1, LI Wenhai1,*()
Received:2022-04-21
Online:2023-07-30
摘要:
无人潜航器集群的发展对水下目标探测产生了巨大挑战。针对水下多个低可探测目标检测问题和隐蔽性探测需求,提出一种基于Hough变换检测前跟踪的水下多目标被动检测方法。利用航空被动声纳浮标阵,构建水下无人潜航器被动检测模型;采用多枚被动声纳浮标自适应关联交叉定位技术,实现隐蔽检测前的数据预处理;采用双门限随机Hough变换检测前跟踪算法,实现水下高噪声密度条件下多目标的低可探测性的需求。仿真结果表明,该方法在低信噪比、多目标点迹交叉条件下具有较好的检测性能。
王学敏, 于洪波, 张翔宇, 安舒, 李文海. 基于Hough变换检测前跟踪的水下多目标被动检测方法[J]. 兵工学报, 2023, 44(7): 2114-2121.
WANG Xuemin, YU Hongbo, ZHANG Xiangyu, AN Shu, LI Wenhai. Underwater Multi-target Detection Method Based on Hough Transform Track-before-detect Technique[J]. Acta Armamentarii, 2023, 44(7): 2114-2121.
图1 方法流程及核心内容
Fig.1 Method flow and core content
图2 浮标拦截阵探测水下目标示意图
Fig.2 Schematic diagram of buoy interception array for detecting underwater targets
图3 被动声纳浮标阵探测多目标示意图
Fig.3 Schematic diagram of passive sonar buoy array for detecting multiple targets
图4 双门限随机HT-TBD多目标检测流程
Fig.4 Multi-target detection flow of two-threshold randomized HT-TBD
| 检测概率和 运算时间 | Na | |||||
|---|---|---|---|---|---|---|
| 3 | 4 | 5 | 6 | 7 | 8 | |
| 检测概率/% | 58.3 | 67.2 | 78.3 | 82.1 | 83.5 | 83.1 |
| 运算时间/s | 1.11 | 1.14 | 1.21 | 1.35 | 1.57 | 1.71 |
表1 不同积累次数条件下的检测结果
Table 1 Results obtained after different times of accumulation
| 检测概率和 运算时间 | Na | |||||
|---|---|---|---|---|---|---|
| 3 | 4 | 5 | 6 | 7 | 8 | |
| 检测概率/% | 58.3 | 67.2 | 78.3 | 82.1 | 83.5 | 83.1 |
| 运算时间/s | 1.11 | 1.14 | 1.21 | 1.35 | 1.57 | 1.71 |
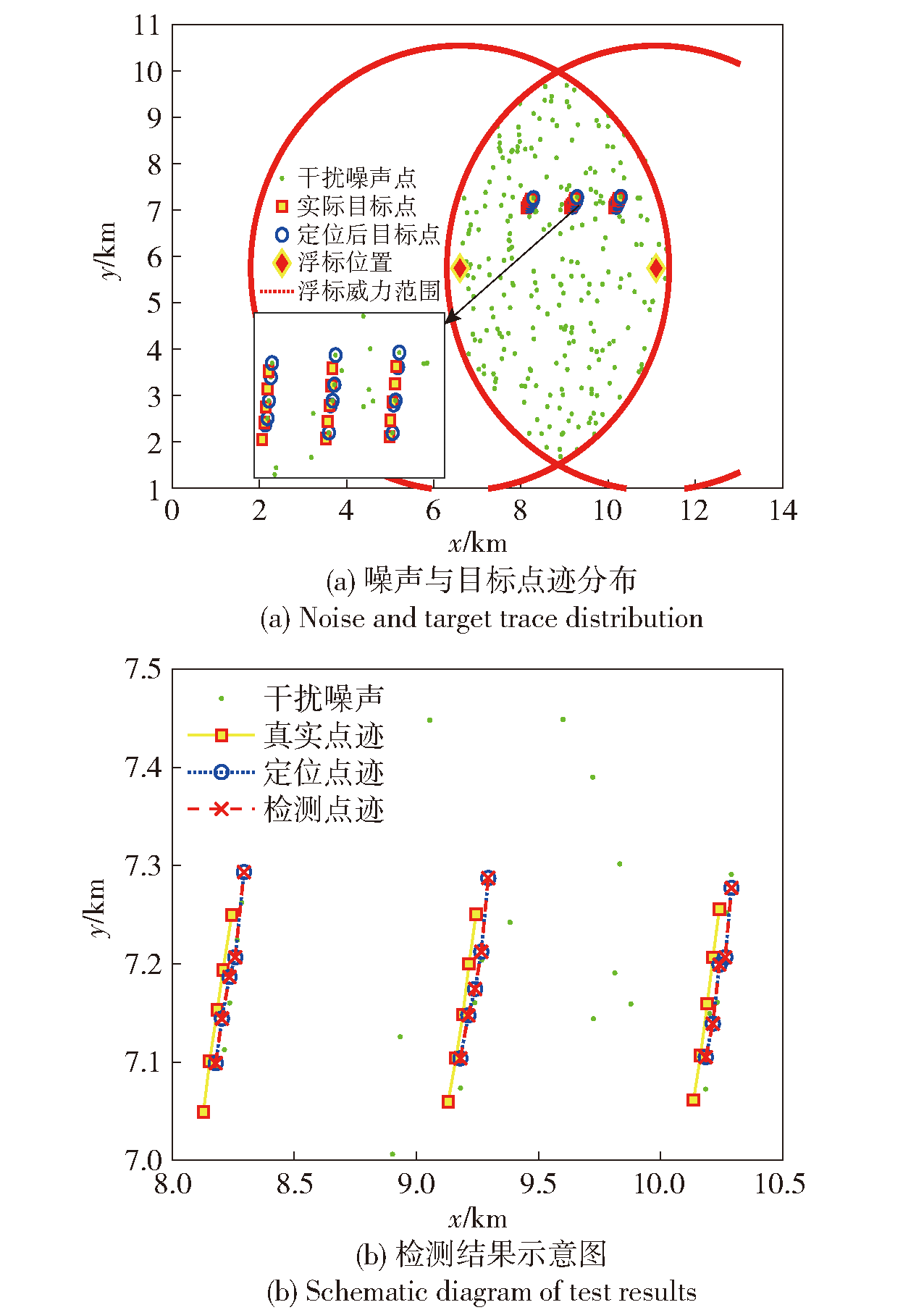
图5 λ=100时检测示意图
Fig.5 Schematic diagram of detection when λ=100
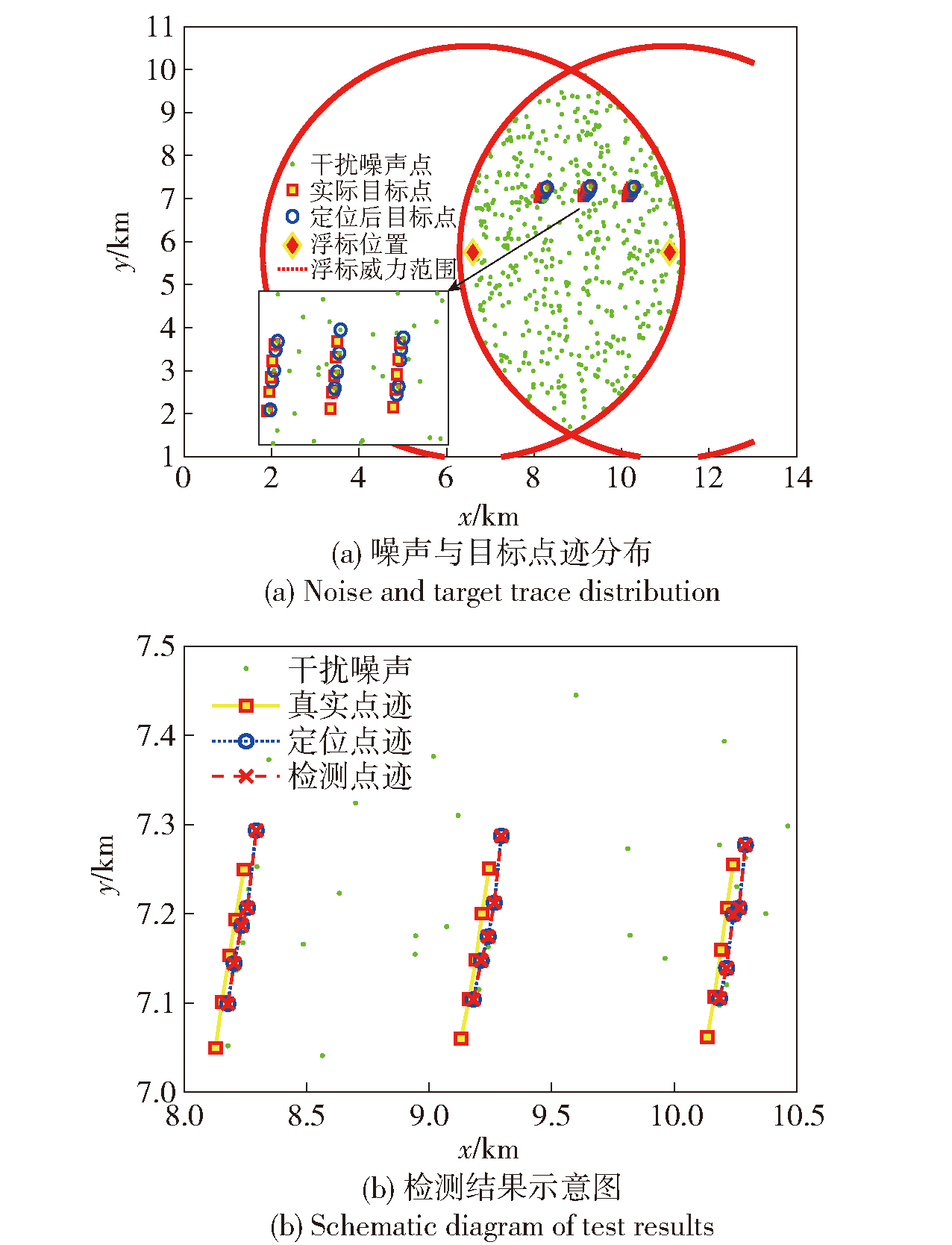
图6 λ=200时检测示意图
Fig.6 Schematic diagram of detection when λ=200
| 目标 | 信噪比/dB | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 单目标 | 10 | 40 | 72 | 73 | 75 | 79 | 81 | 83 | 85 | 86 |
| 多目标 | 0 | 18 | 61 | 62 | 66 | 67 | 69 | 71 | 73 | 74 |
表2 不同信噪比条件单/多目标检测概率
Table 2 Statistics of single/multi-target detection probability under different SNR conditions
| 目标 | 信噪比/dB | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 单目标 | 10 | 40 | 72 | 73 | 75 | 79 | 81 | 83 | 85 | 86 |
| 多目标 | 0 | 18 | 61 | 62 | 66 | 67 | 69 | 71 | 73 | 74 |
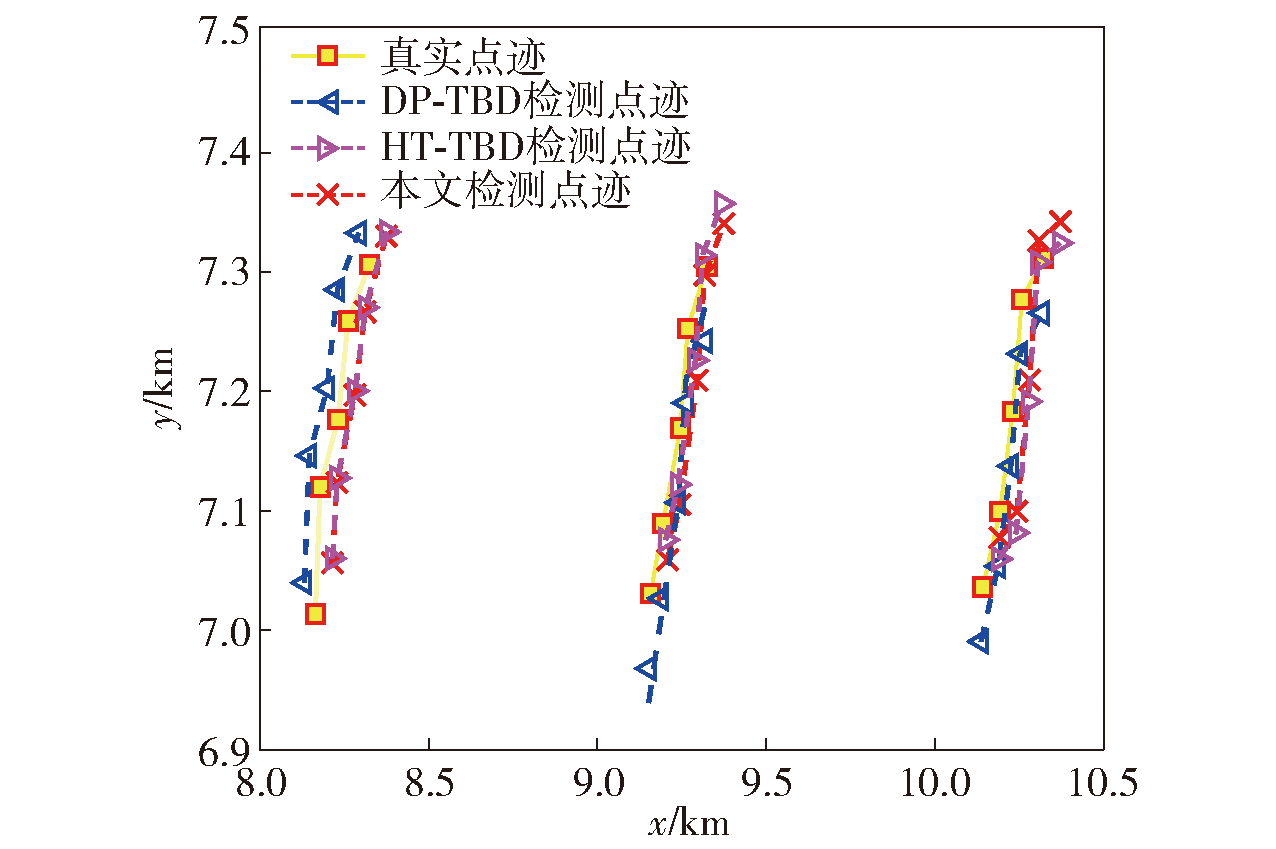
图7 目标点迹非交叉检测示意图
Fig.7 Schematic diagram of non-crossing target point trace detection
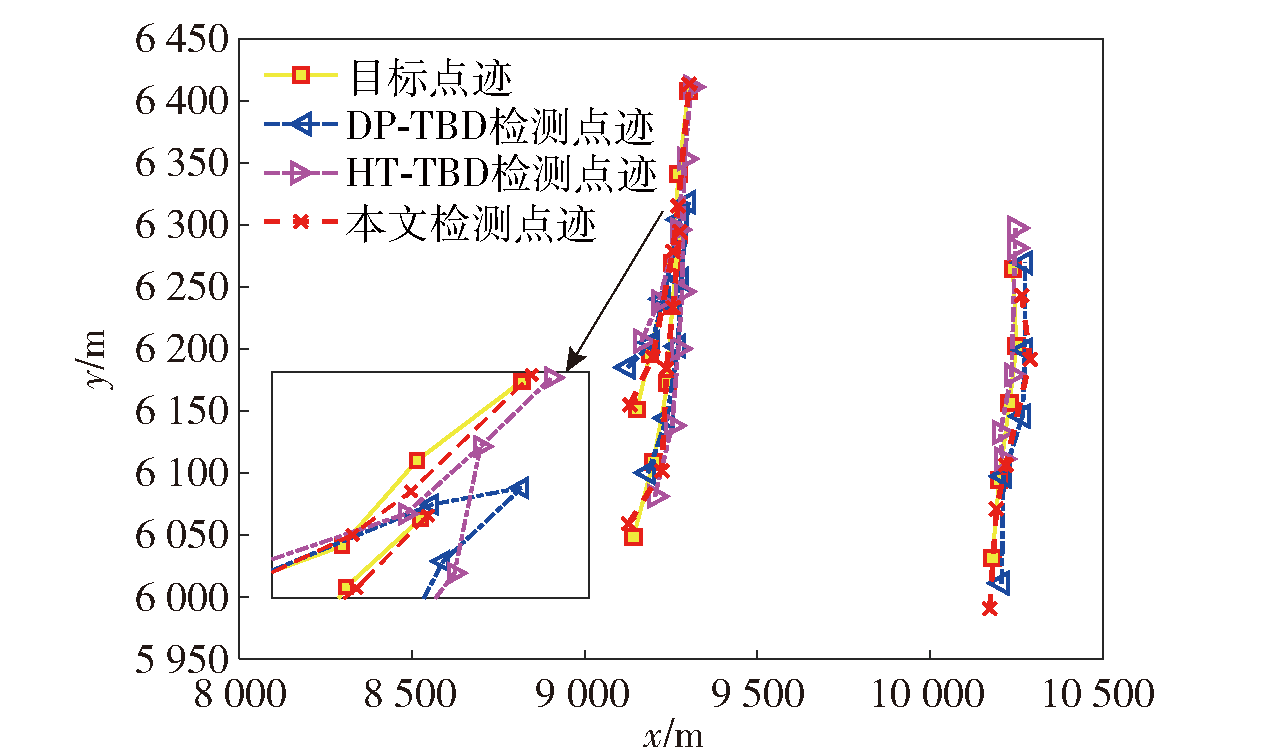
图8 目标点迹交叉检测示意图
Fig.8 Schematic diagram of crossing target point trace detection
| 信噪比/ dB | 检测概率/% | 平均运行时间/s | ||||
|---|---|---|---|---|---|---|
| DP- TBD | HT- TBD | 本文 方法 | DP- TBD | HT- TBD | 本文 方法 | |
| 3 | 49.2 | 47.3 | 60.1 | 2.51 | 3.12 | 1.71 |
| 5 | 52.7 | 53.4 | 63.6 | 2.38 | 2.65 | 1.42 |
| 10 | 68.3 | 66.6 | 71.5 | 2.33 | 2.32 | 1.34 |
表3 3种方法检测性能比较
Table 3 Performance comparison of three detection methods
| 信噪比/ dB | 检测概率/% | 平均运行时间/s | ||||
|---|---|---|---|---|---|---|
| DP- TBD | HT- TBD | 本文 方法 | DP- TBD | HT- TBD | 本文 方法 | |
| 3 | 49.2 | 47.3 | 60.1 | 2.51 | 3.12 | 1.71 |
| 5 | 52.7 | 53.4 | 63.6 | 2.38 | 2.65 | 1.42 |
| 10 | 68.3 | 66.6 | 71.5 | 2.33 | 2.32 | 1.34 |
| [1] |
薄钧天, 于洪波, 张翔宇, 等. 基于峰值自寻的多目标检测前跟踪算法[J/OL]. 系统工程与电子技术: 1-12(2022-04-06)[2022-04-27]. http://kns.cnki.net/kcms/detail/11.2422.TN.20220402.1644.020.html.
|
|
|
|
| [2] |
卢锦, 王鑫. 基于代价参考粒子滤波器组的检测前跟踪算法[J]. 电子与信息学报, 2021, 43(10): 2815-2823.
|
|
|
|
| [3] |
doi: 10.1016/j.apacoust.2020.107750 URL |
| [4] |
张奕群, 尹立凡, 王硕, 等. 一种改进的直方图概率多假设多目标跟踪方法[J]. 航空学报, 2021, 42(11): 115-128.
|
|
|
|
| [5] |
王宁, 孟晋丽, 刘国庆, 等. 机载雷达微弱目标帧间非相参积累与检测技术[J]. 信号处理, 2021, 37(2): 248-257.
|
|
|
|
| [6] |
邵鹏飞, 王蕾, 王方勇. 基于序贯蒙特卡洛与概率假设密度滤波的主动分布式声纳多目标跟踪[J]. 兵工学报, 2020, 41(5):941-949.
doi: 10.3969/j.issn.1000-1093.2020.05.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.05.013 |
|
| [7] |
张袁鹏, 郑岱堃, 李昕哲, 等. 基于隐马尔可夫模型的动态规划检测前跟踪算法[J]. 系统工程与电子技术, 2019, 41(11): 2479-2487.
doi: 10.3969/j.issn.1001-506X.2019.11.11 |
|
doi: 10.3969/j.issn.1001-506X.2019.11.11 |
|
| [8] |
周天, 张丽红, 杜伟东, 等. 声纳图像多目标跟踪高斯滤波算法[J]. 哈尔滨工程大学学报, 2020, 41(5): 691-697.
|
|
|
|
| [9] |
|
| [10] |
doi: 10.1049/iet-rsn.2011.0266 URL |
| [11] |
|
| [12] |
doi: 10.1109/TIT.18 URL |
| [13] |
doi: 10.3390/rs13234942 URL |
| [14] |
|
| [15] |
胡健阳, 段先华, 马启星. 基于粒子群优化粒子滤波的声纳目标检测前跟踪[J]. 船舶工程, 2022, 44(1): 91-95.
|
|
|
|
| [16] |
奚畅, 蔡志明, 袁骏. 基于leg-by-leg机动的两级采样被动跟踪方法[J]. 电子与信息学报, 2021, 43(10):2805-2814.
|
|
|
|
| [17] |
刘文进, 马启明, 董义俊. 基于改进动态规划的主动声纳序列图像检测方法[J]. 应用声学, 2018, 37(4): 528-539.
|
|
|
|
| [18] |
doi: 10.3390/s20010001 URL |
| [19] |
doi: 10.1109/ACCESS.2018.2825887 URL |
| [20] |
doi: 10.1109/JSTARS.4609443 URL |
| [21] |
doi: 10.3390/math9010001 URL |
| [22] |
doi: 10.1109/TIE.2021.3076719 URL |
| [23] |
|
| [24] |
何友, 修建娟, 关欣, 等. 雷达数据处理及应用[M].第3版. 北京: 电子工业出版社, 2015:108-112.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
doi: 10.1109/7.250410 URL |
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [1] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [2] | 秦昊林, 许廷发, 李佳男. 基于超像素注意力和孪生结构的半监督高光谱显著性目标检测[J]. 兵工学报, 2023, 44(9): 2639-2649. |
| [3] | 惠康华, 杨卫, 刘浩翰, 张智, 郑锦, 百晓. 基于YOLOv5的增强多尺度目标检测方法[J]. 兵工学报, 2023, 44(9): 2600-2610. |
| [4] | 周宇, 曹荣刚, 栗苹, 马啸. 一种用于外场试验图像的引信炸点检测方法[J]. 兵工学报, 2023, 44(8): 2453-2464. |
| [5] | 柳嵩, 姚直象, 陆代强, 袁骏. 一种基于被动声呐宽带空间谱的自动检测算法[J]. 兵工学报, 2023, 44(6): 1764-1774. |
| [6] | 马鹏阁, 魏宏光, 孙俊灵, 陶然, 庞栋栋, 单涛, 蔡志勇, 刘兆瑜. 基于高斯-拉普拉斯滤波的增强局部对比度红外小目标检测算法[J]. 兵工学报, 2023, 44(4): 1041-1049. |
| [7] | 孙强, 张伽伟, 喻鹏. 基于海洋浮标的电场干扰特性分析及信号检测方法[J]. 兵工学报, 2023, 44(3): 857-864. |
| [8] | 黄隽, 吴鹏飞, 李晓宝, 刘玥. 基于Hough变换和优化K均值聚类的反舰导弹编队识别目标选择方法[J]. 兵工学报, 2023, 44(2): 472-483. |
| [9] | 郭永红, 牛海涛, 史超, 郭铖. 基于卷积和注意力机制的小样本目标检测[J]. 兵工学报, 2023, 44(11): 3508-3515. |
| [10] | 王强, 吴乐天, 李红, 王勇, 王欢, 杨万扣. 基于双支网络协作的红外弱小目标检测[J]. 兵工学报, 2023, 44(10): 3165-3176. |
| [11] | 李博, 王博, 韩京冶, 杨宗睿, 栗霖雲, 傅畅之. 基于车载计算机的红外图像移动目标检测[J]. 兵工学报, 2022, 43(S1): 66-73. |
| [12] | 严继伟, 苏娟, 李义红. 基于[KG-*9]Ghost卷积与注意力机制的SAR图像建筑物检测算法[J]. 兵工学报, 2022, 43(7): 1667-1675. |
| [13] | 王少博, 张成, 苏迪, 冀瑞静. 基于改进YOLOv3和核相关滤波算法的旋转弹目标探测算法[J]. 兵工学报, 2022, 43(5): 1032-1045. |
| [14] | 于博文, 吕明. 改进的YOLOv3算法及其在军事目标检测中的应用[J]. 兵工学报, 2022, 43(2): 345-354. |
| [15] | 吴超, 吴绍斌, 李子睿, 孙冬. 基于人机交互的免锚检测和跟踪系统设计[J]. 兵工学报, 2022, 43(10): 2565-2575. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4