
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240836-.doi: 10.12382/bgxb.2024.0836
• Special Topics of Academic Papers at the 27th Annual Meeting of the China Association for Science and technology • Previous Articles Next Articles
WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin*( )
)
Received:2024-09-11
Online:2025-06-28
Contact:
CHEN Huimin
CLC Number:
WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR[J]. Acta Armamentarii, 2025, 46(6): 240836-.
Add to citation manager EndNote|Ris|BibTeX
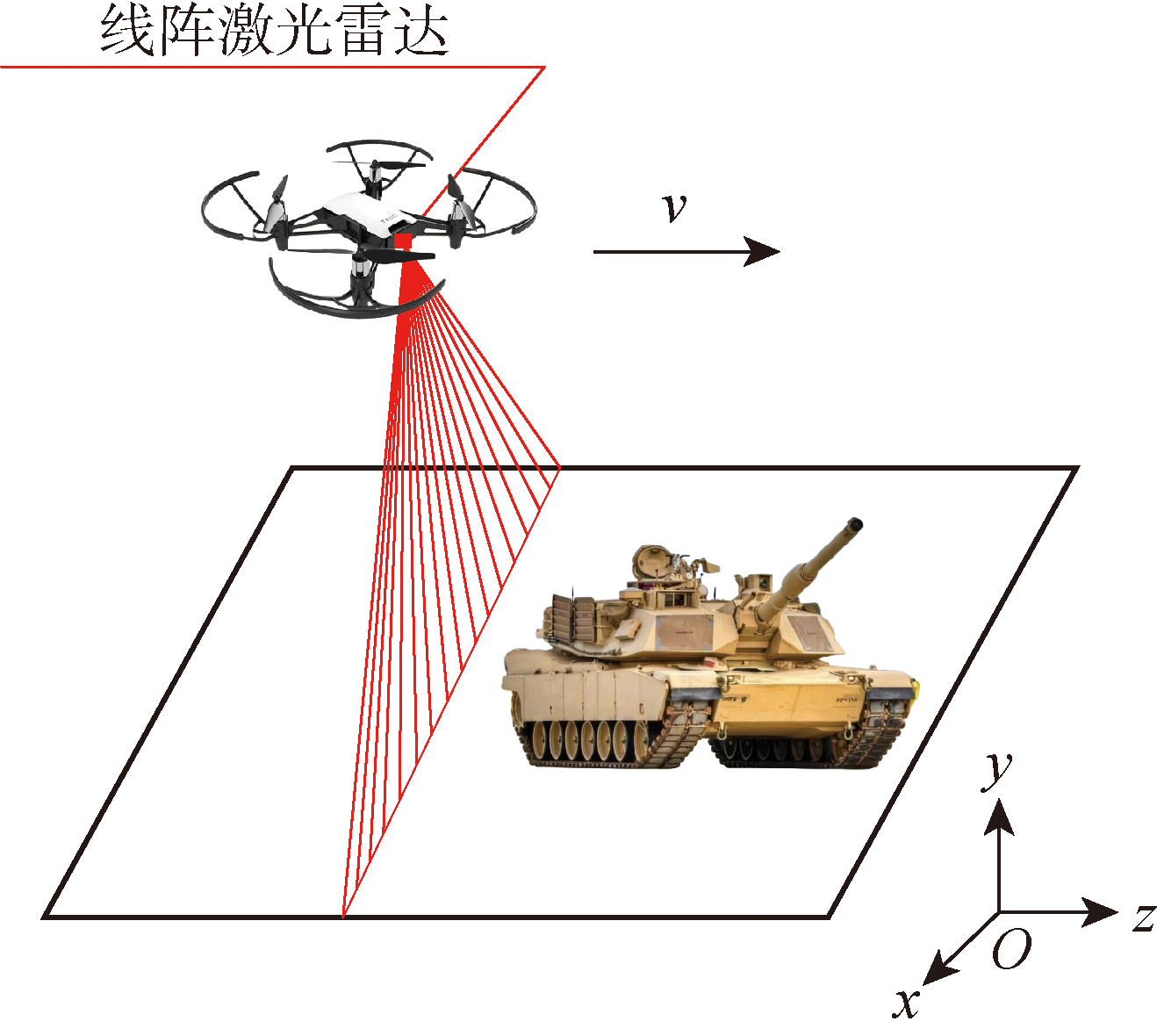
Fig.1 Schematic diagram of pushbroom imaging
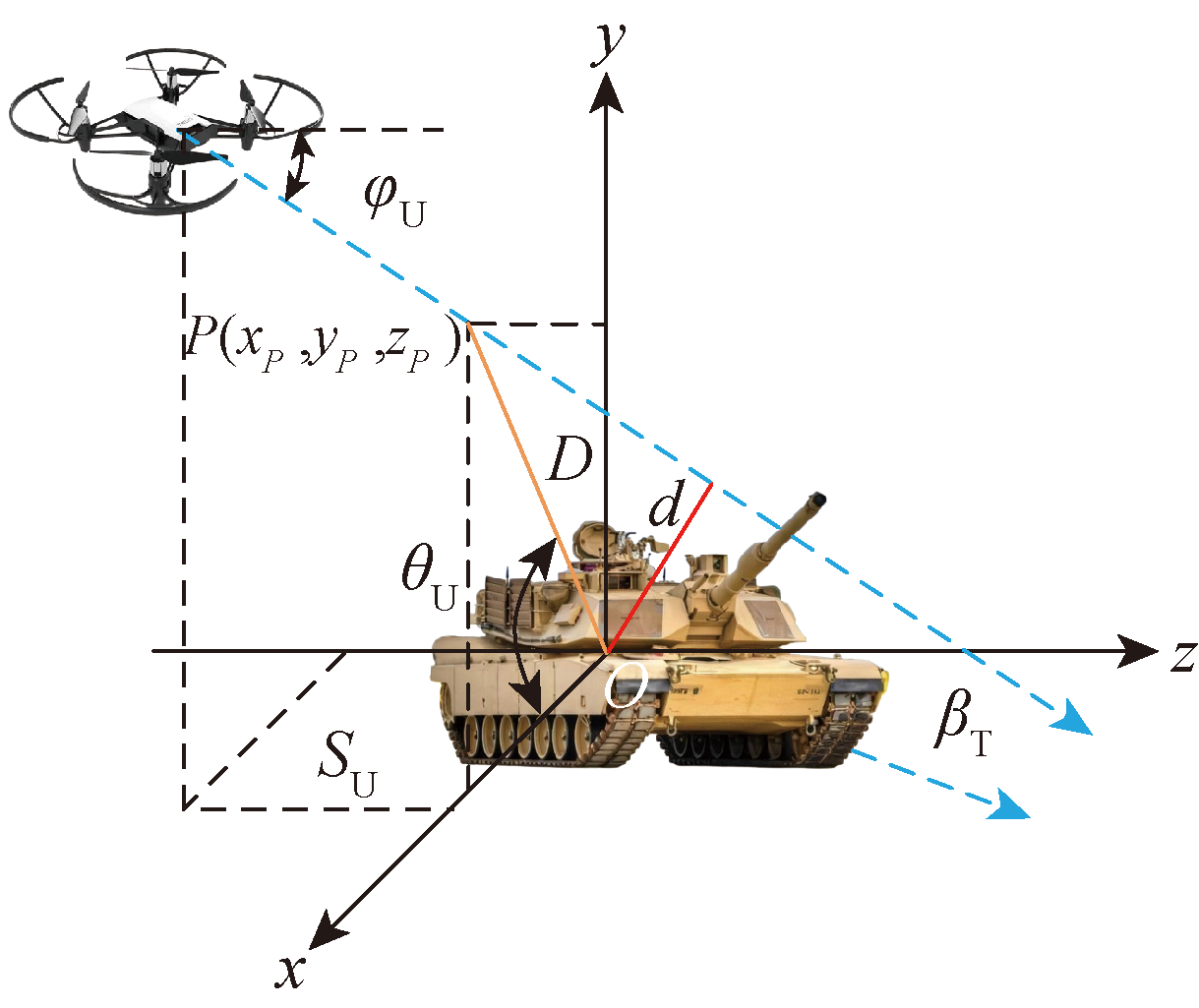
Fig.2 Scene of UAV and target rendezvous

Fig.3 Typical target model

Fig.4 Construction of rugged terrain scenes

Fig.5 Construction of camouflage and vegetation cover scene
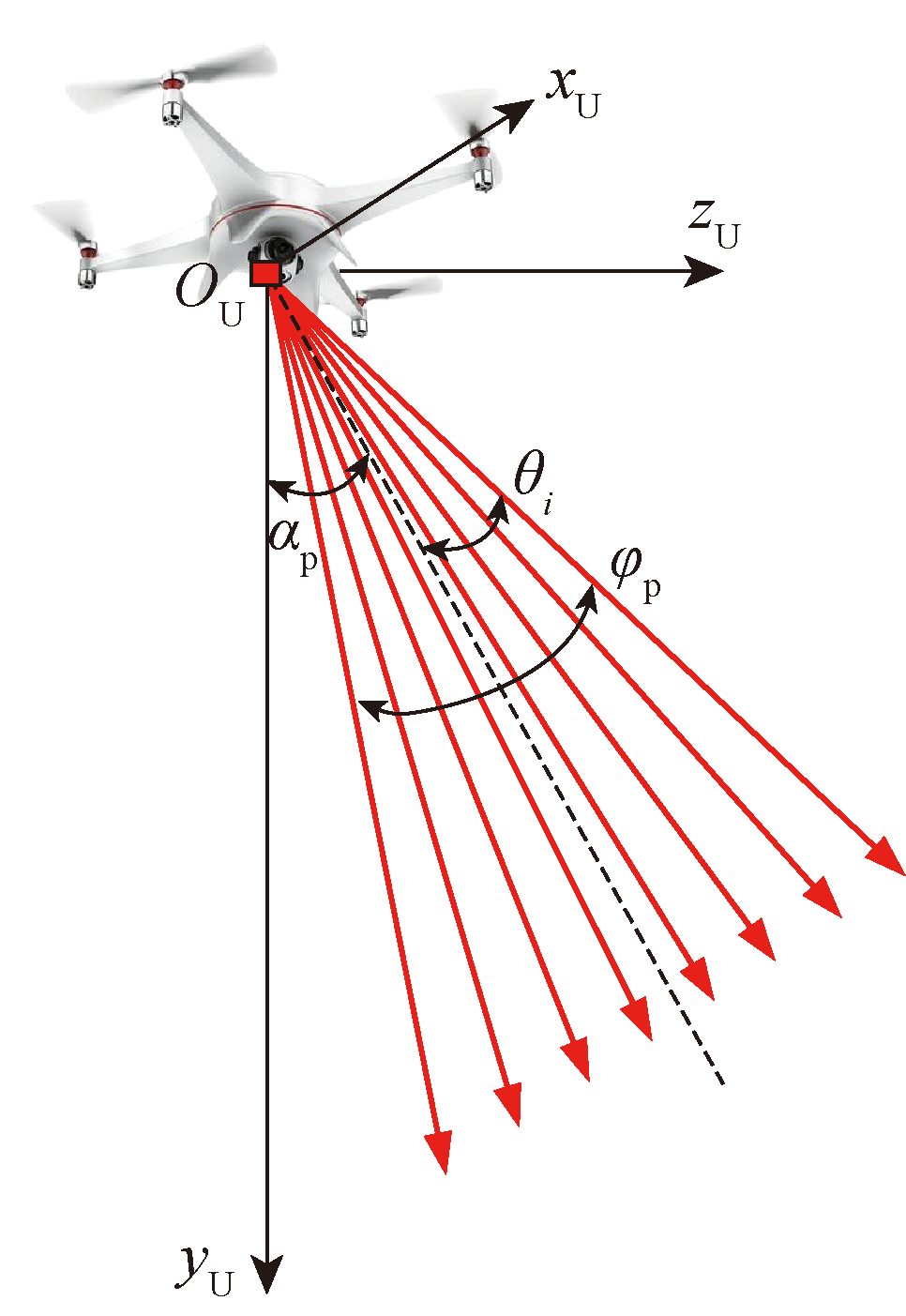
Fig.6 Emission direction vector cluster

Fig.7 Point clouds with different attack angles in the coordinate system of LiDAR

Fig.8 Point cloud after distortion correction in the target coordinate system
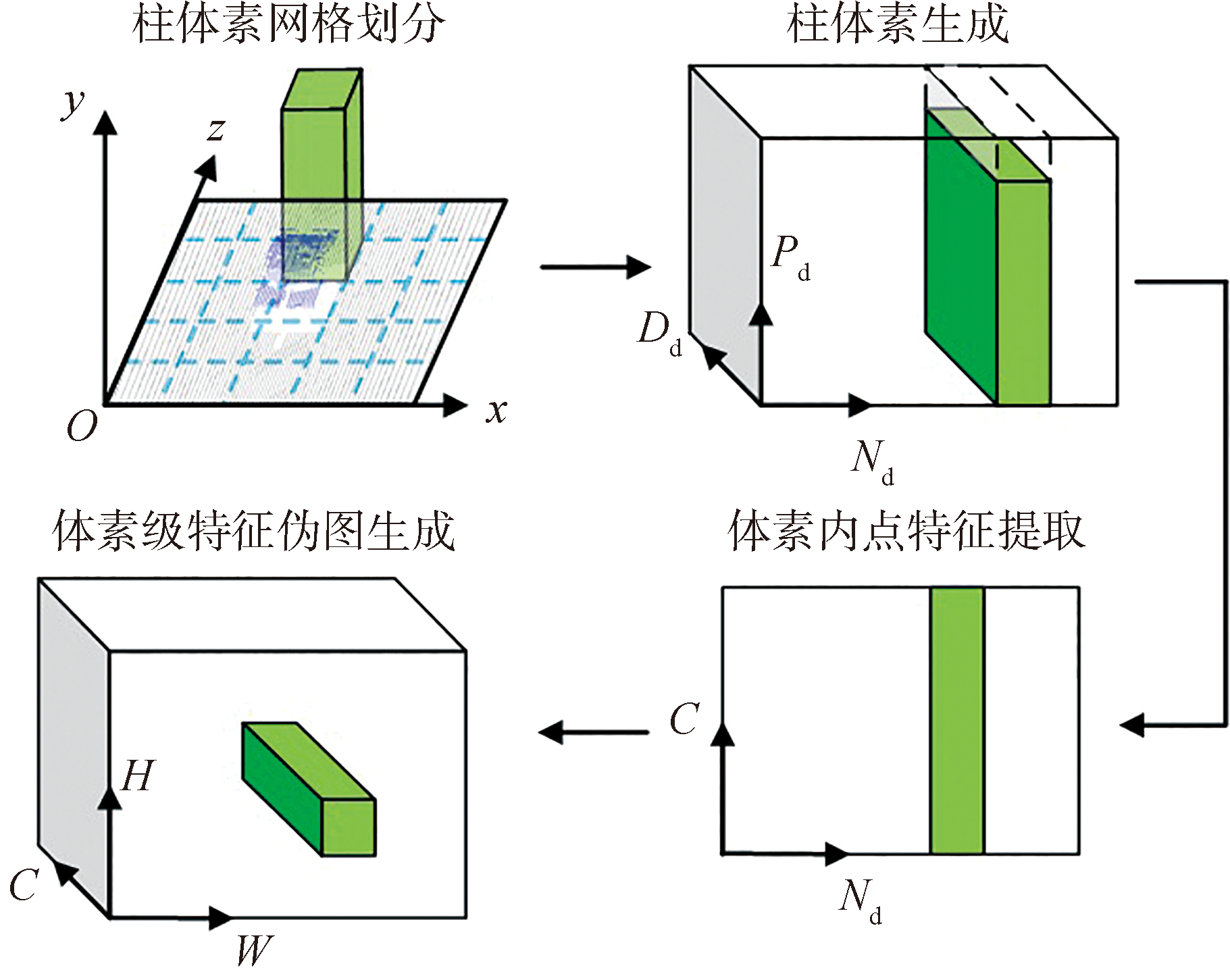
Fig.9 Pillar-voxel-based feature extraction method
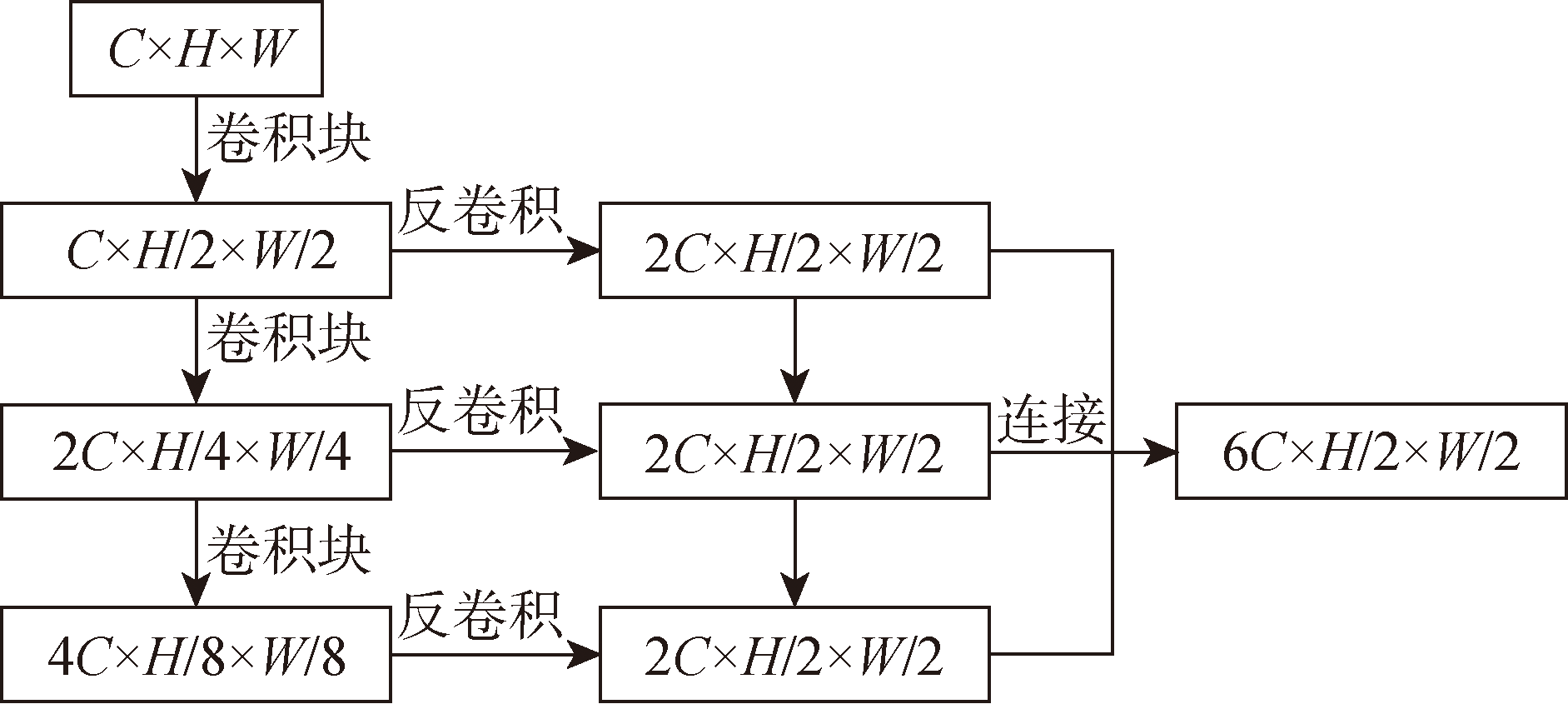
Fig.10 Schematic diagram of backbone network
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 脱靶量/m | 5 | 激光重频/Hz | 360 |
| 脱靶方位/(°) | 0~180 | 起始位置/m | 10 |
| 交会角度/(°) | 0~360 | 水平视场角/(°) | 60 |
| 飞行速度/(m·s-1) | 10 | 激光线数 | 300 |
| 攻击角/(°) | 0~60 | 探测距离/m | 20 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 脱靶量/m | 5 | 激光重频/Hz | 360 |
| 脱靶方位/(°) | 0~180 | 起始位置/m | 10 |
| 交会角度/(°) | 0~360 | 水平视场角/(°) | 60 |
| 飞行速度/(m·s-1) | 10 | 激光线数 | 300 |
| 攻击角/(°) | 0~60 | 探测距离/m | 20 |

Fig.11 Simulated results under typical targets and parameters

Fig.12 Simulation point cloud under typical environmental interference
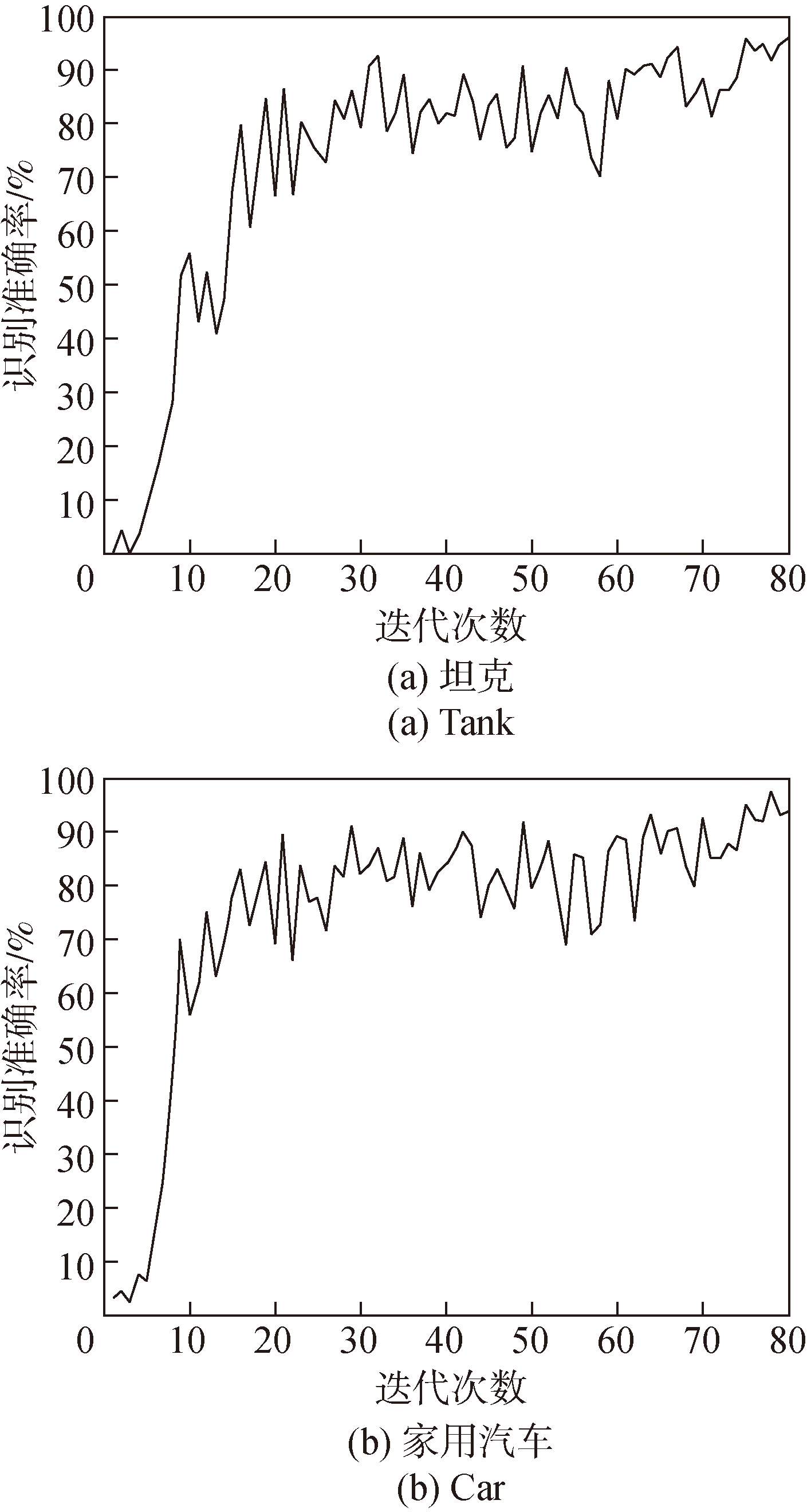
Fig.13 Iterative curves of recognition accuracy for tank and car
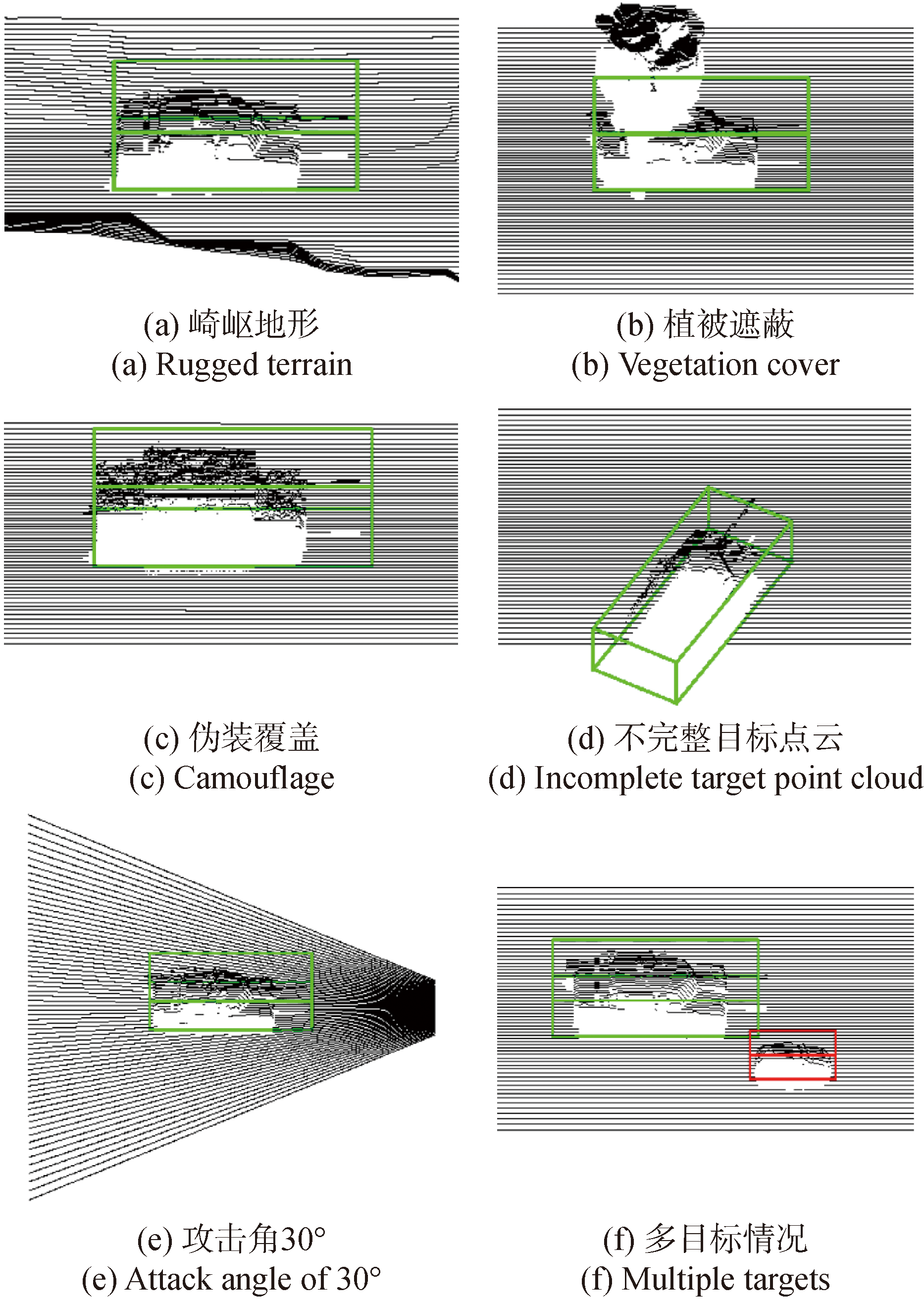
Fig.14 Recognition effects under various typical scenarios and parameters
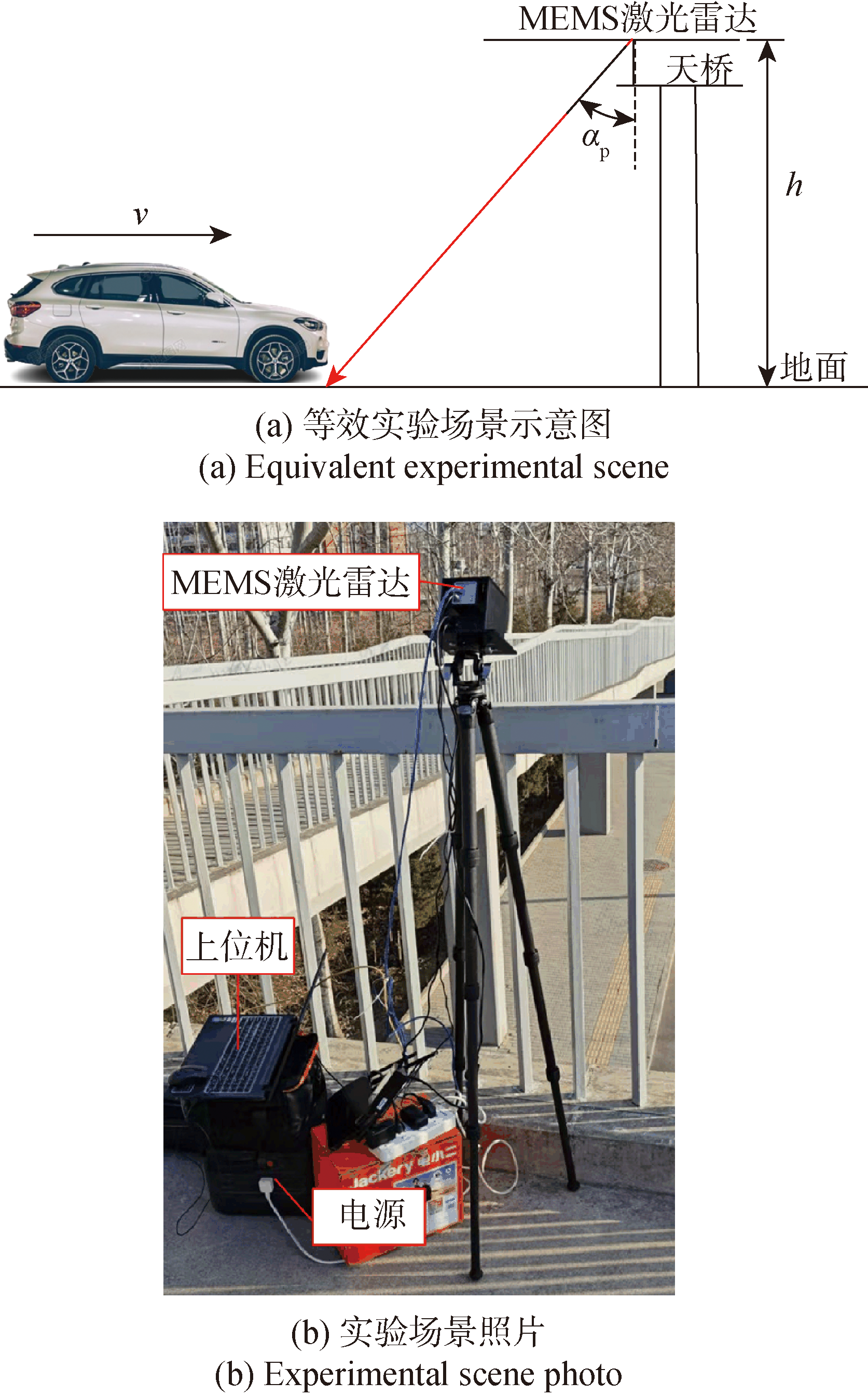
Fig.15 Equivalent experimental imaging scene of line-array LiDAR
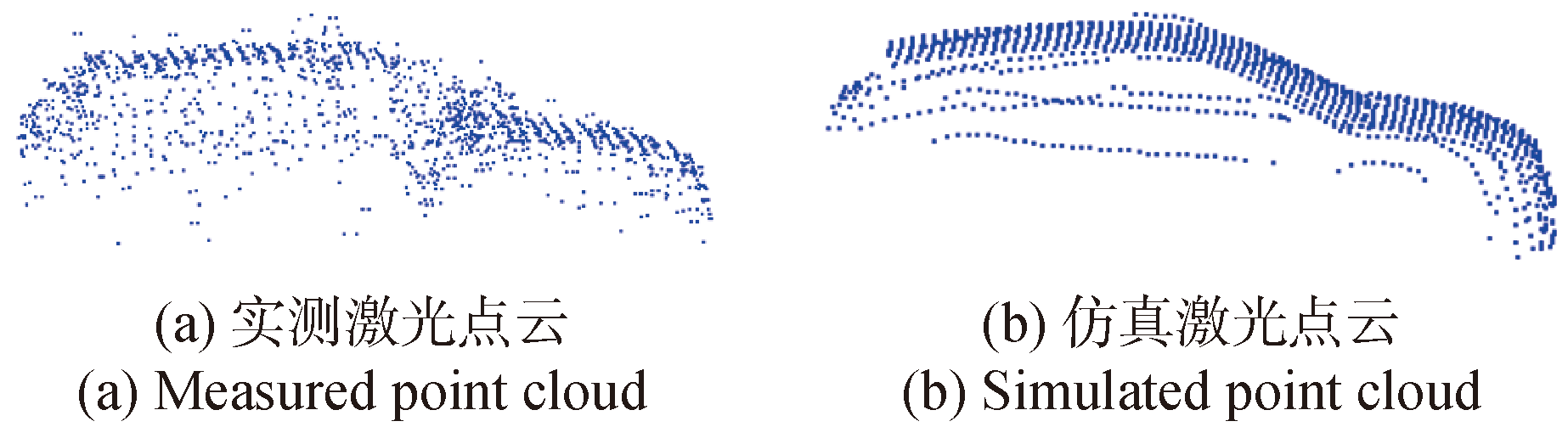
Fig.16 Measured and simulated data

Fig.17 Recognition effect of measured point cloud
| [1] |
张宇, 张焱, 石志广, 等. 基于图像衍生的红外无人机图像仿真方法研究[J]. 光学学报, 2022, 42(2):99-112.
|
|
|
|
| [2] |
陈杉杉, 张合, 徐孝彬. 脉冲激光引信探测平面目标的回波特性研究[J]. 兵工学报, 2018, 39(6):1095-1102.
|
|
|
|
| [3] |
陈慧敏, 贾晓东, 蔡克荣. 激光引信技术[M]. 北京: 国防工业出版社, 2016.
|
|
|
|
| [4] |
霍健, 陈慧敏, 马云飞, 等. 基于MEMS激光雷达的车辆目标识别算法[J]. 兵工学报, 2023, 44(4):940-948.
|
|
|
|
| [5] |
邓涛, 刘双, 魏汉迪. 基于视觉的无人机艇系统姿态感知研究[J]. 舰船科学技术, 2024, 46(16):81-89.
|
|
|
|
| [6] |
任娜, 张玉, 王洪江, 等. 基于二维正态分布的无人机激光雷达点云匹配研究[J]. 激光杂志, 2024, 45(4):265-270.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
张文豪, 李松, 马跃, 等. 星载光子计数激光雷达海面点云仿真方法[J]. 红外与毫米波学报, 2020, 39(4):483-490.
|
|
|
|
| [15] |
陈剑彪, 孙华燕, 赵延仲. 空中目标激光雷达一维距离像仿真及实验研究[J]. 激光与光电子学进展, 2017, 54(7):324-331.
|
|
|
|
| [16] |
武军安, 郭锐, 刘荣忠, 等. 用于弹载线阵红外与激光扫描成像引信的轻量化卷积神经网络目标识别方法[J]. 弹道学报, 2021, 33(3):89-96.
|
|
|
|
| [17] |
张笑宇, 王凤香, 郭颖, 等. 基于InGaAs单光子探测器的线阵扫描激光雷达及其光子信号处理技术研究[J]. 红外与激光工程, 2023, 52(3):186-194.
|
|
|
|
| [18] |
陈慧敏, 李铁, 刘锡民, 等. 近程激光探测技术[M]. 北京: 北京理工大学出版社, 2018.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
黄泽青, 贺伟. 基于激光引信的回波仿真及抗干扰研究[J]. 激光技术, 2020, 44(6):716-720.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [2] | ZHANG Jiaqi, SHI Zhangsong, XU Huihui. An Underwater Acoustic Target Recognition Algorithm Based on Brain Network Features [J]. Acta Armamentarii, 2025, 46(5): 240735-. |
| [3] | SUN Dianxing, DOU Yuecong, PENG Ruihui, DONG Yunlong, GUO Wei. An Intelligent Corner Reflector Recognition Algorithm Based on Radar-infrared Imaging Feature-level Fusion [J]. Acta Armamentarii, 2025, 46(5): 240501-. |
| [4] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [5] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [6] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [7] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [8] | LIU Cong, LI Baiqing, ZHANG Zongwei, SHAN Zezhong. Investigation of Multi-dimensional Aerodynamic Characteristics of UAV Rotor Subjected to Horizontal Inflow [J]. Acta Armamentarii, 2025, 46(3): 240316-. |
| [9] | HAN Yanwen, YAN Xiaopeng, GAO Xiaofeng, YI Guanghua, DAI Jian. Fuze Target Recognition Method Based on Motion Array Microwave Imaging and Multi-scale Deformable Convolutional Network [J]. Acta Armamentarii, 2025, 46(3): 240282-. |
| [10] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [11] | XU Tunan, GAO Ang, CHEN Yucheng, YAN Shoucheng, DENG Bin. A Lightweight Recognition Method for Low Altitude Targets in the Battlefield [J]. Acta Armamentarii, 2025, 46(2): 240170-. |
| [12] | ZHANG Xinze, XIAO Haijian, LIU Xinglong, XING Kongrui, LU Xiang. Design and Realization of a Ducted Fan Water-air Amphibious UAV [J]. Acta Armamentarii, 2025, 46(1): 231172-. |
| [13] | CHEN Shichao, WEI Jingbiao, FAN Jun, WEI Xizhang, WANG Zechao, SUN Qian, LIU Ming. Research on HRRP Sequences Recognition Based on Discriminative Infinite Fuzzy Restricted Boltzmann Machine Model [J]. Acta Armamentarii, 2024, 45(S1): 43-50. |
| [14] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [15] | LI Mao, ZHAO Mingtao, SHA Shichao, LI Xiao, HUA Weihong. Focusing Strategy and Effect Analysis of UAV-based Laser Relay Redirectional Energy Transmission Device [J]. Acta Armamentarii, 2024, 45(S1): 316-321. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||