
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240410-.doi: 10.12382/bgxb.2024.0410
Previous Articles Next Articles
WANG Haoning, GUO Jie*( ), WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang
), WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang
Received:2023-10-24
Online:2025-04-30
Contact:
GUO Jie
CLC Number:
WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction[J]. Acta Armamentarii, 2025, 46(4): 240410-.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Coordinate system for HGV formation
Fig.2 Diagram of underactuated control
Fig.3 Diagram of position error adjustment in launch direction
Fig.4 Diagram of artificial potential field

Fig.5 Control architecture for underactuated HGV formation
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,30,0) | (0,30,0) | (0,30,0) | (0,30,0) |
| M2 | (0,30,0) | (5,30,0) | (5,30,0) | (5,31.5,0) |
| M3 | (0,30,0) | (-5,30,0) | (-5,30,0) | (-5,31.5,0) |
| M4 | (0,30,0) | (10,30,0) | (10,30,0) | (10,33,0) |
| M5 | (0,30,0) | (-10,30,0) | (-10,30,0) | (-10,33,0) |
Table 1 Initial positions of HGVs km
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,30,0) | (0,30,0) | (0,30,0) | (0,30,0) |
| M2 | (0,30,0) | (5,30,0) | (5,30,0) | (5,31.5,0) |
| M3 | (0,30,0) | (-5,30,0) | (-5,30,0) | (-5,31.5,0) |
| M4 | (0,30,0) | (10,30,0) | (10,30,0) | (10,33,0) |
| M5 | (0,30,0) | (-10,30,0) | (-10,30,0) | (-10,33,0) |
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,0,0) | (0,0,0) | (0,0,0) | (0,0,0) |
| M2 | (-5,0,0) | (-1.5,0,0) | (-5,0,0) | (-5,1.5,0) |
| M3 | (5,0,0) | (1.5,0,0) | (5,0,0) | (5,1.5,0) |
| M4 | (-10,0,0) | (-3,0,0) | (-10,0,0) | (-10,3,0) |
| M5 | (10,0,0) | (3,0,0) | (10,0,0) | (10,3,0) |
Table 2 Desired formation of HGVs km
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,0,0) | (0,0,0) | (0,0,0) | (0,0,0) |
| M2 | (-5,0,0) | (-1.5,0,0) | (-5,0,0) | (-5,1.5,0) |
| M3 | (5,0,0) | (1.5,0,0) | (5,0,0) | (5,1.5,0) |
| M4 | (-10,0,0) | (-3,0,0) | (-10,0,0) | (-10,3,0) |
| M5 | (10,0,0) | (3,0,0) | (10,0,0) | (10,3,0) |
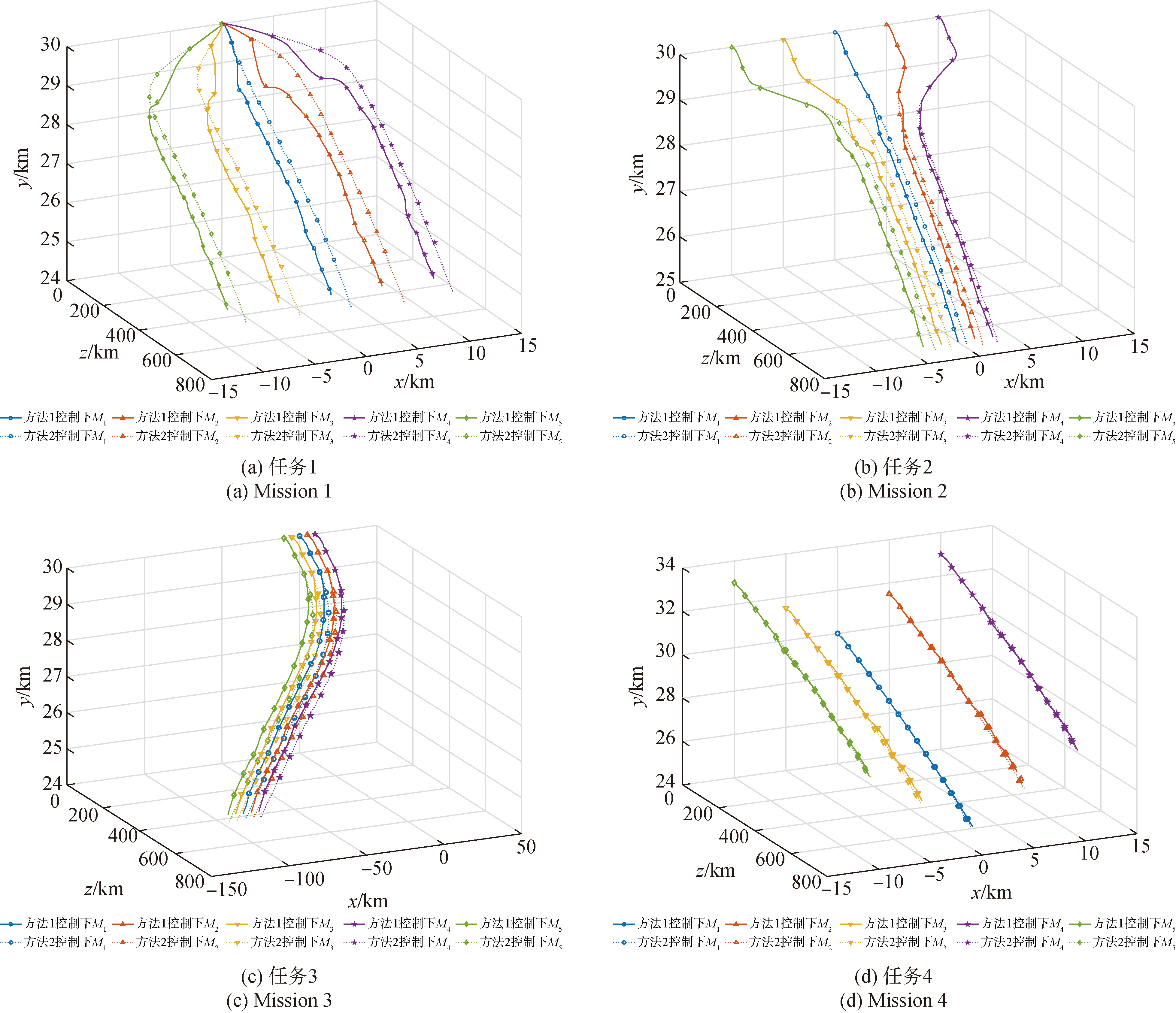
Fig.6 3D formation trajectories for each mission

Fig.7 Velocity curves for each mission
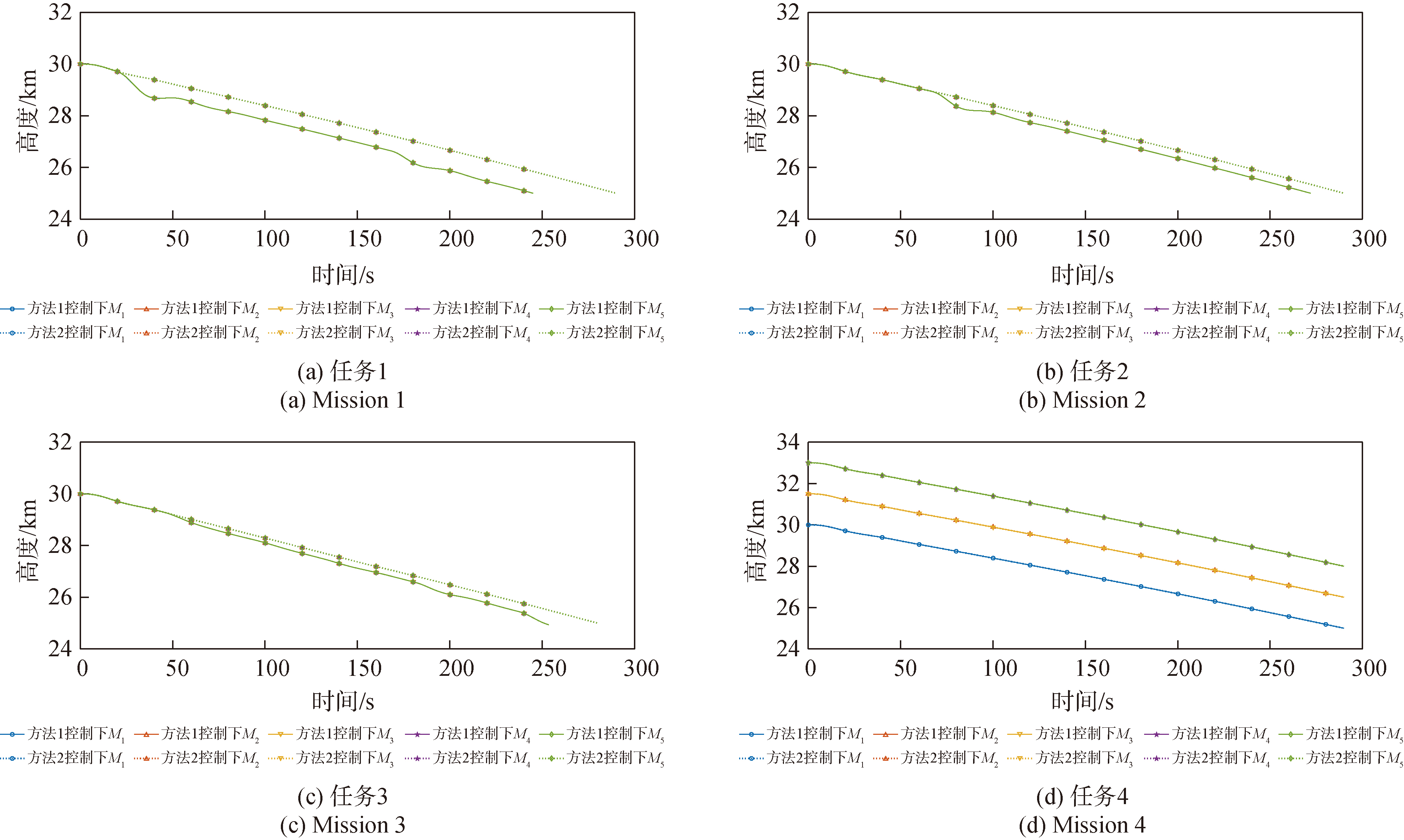
Fig.8 Altitude curves for each mission

Fig.9 Guidance command curves for each mission
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 4994.12 | 0.0021 | 198.90 | 5005.72 | 0.0022 | 4.70 | 5001.31 | 0.0003 | 518.23 | 4989.68 | 0.0005 | 186.78 |
| 2 | 1592.52 | 0.0067 | 854.82 | 1660.07 | 0.0046 | 579.22 | 1746.29 | 0.0051 | 208.56 | 1737.20 | 0.0001 | 23.46 |
| 3 | 4943.65 | 0.0110 | 728.30 | 5053.97 | 0.0011 | 172.14 | 4959.98 | 0.0011 | 116.22 | 5029.10 | 0.0135 | 491.62 |
| 4 | 5095.62 | 1500.01 | 862.75 | 4904.38 | 1500.01 | 862.75 | 4863.37 | 1500.01 | 54.89 | 5136.63 | 1500.01 | 54.89 |
Table 3 Terminal formation interval distance with position adjustment in Method 1
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 4994.12 | 0.0021 | 198.90 | 5005.72 | 0.0022 | 4.70 | 5001.31 | 0.0003 | 518.23 | 4989.68 | 0.0005 | 186.78 |
| 2 | 1592.52 | 0.0067 | 854.82 | 1660.07 | 0.0046 | 579.22 | 1746.29 | 0.0051 | 208.56 | 1737.20 | 0.0001 | 23.46 |
| 3 | 4943.65 | 0.0110 | 728.30 | 5053.97 | 0.0011 | 172.14 | 4959.98 | 0.0011 | 116.22 | 5029.10 | 0.0135 | 491.62 |
| 4 | 5095.62 | 1500.01 | 862.75 | 4904.38 | 1500.01 | 862.75 | 4863.37 | 1500.01 | 54.89 | 5136.63 | 1500.01 | 54.89 |
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 5000.00 | 0 | 4200.43 | 5000.00 | 0 | 5296.45 | 5000.00 | 0 | 12806.37 | 5000.00 | 0 | 13826.46 |
| 2 | 1500.01 | 0 | 1807.01 | 1500.01 | 0 | 2272.72 | 1500.01 | 0 | 5579.01 | 1500.01 | 0 | 6013.45 |
| 3 | 5000.50 | 0 | 1206.19 | 4999.61 | 0 | 1326.80 | 5000.06 | 0 | 1267.05 | 5000.06 | 0 | 1266.07 |
| 4 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 7067.40 | 5000.00 | 1500.00 | 7067.40 |
Table 4 Terminal formation interval distance without position adjustment in Method 2
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 5000.00 | 0 | 4200.43 | 5000.00 | 0 | 5296.45 | 5000.00 | 0 | 12806.37 | 5000.00 | 0 | 13826.46 |
| 2 | 1500.01 | 0 | 1807.01 | 1500.01 | 0 | 2272.72 | 1500.01 | 0 | 5579.01 | 1500.01 | 0 | 6013.45 |
| 3 | 5000.50 | 0 | 1206.19 | 4999.61 | 0 | 1326.80 | 5000.06 | 0 | 1267.05 | 5000.06 | 0 | 1266.07 |
| 4 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 7067.40 | 5000.00 | 1500.00 | 7067.40 |
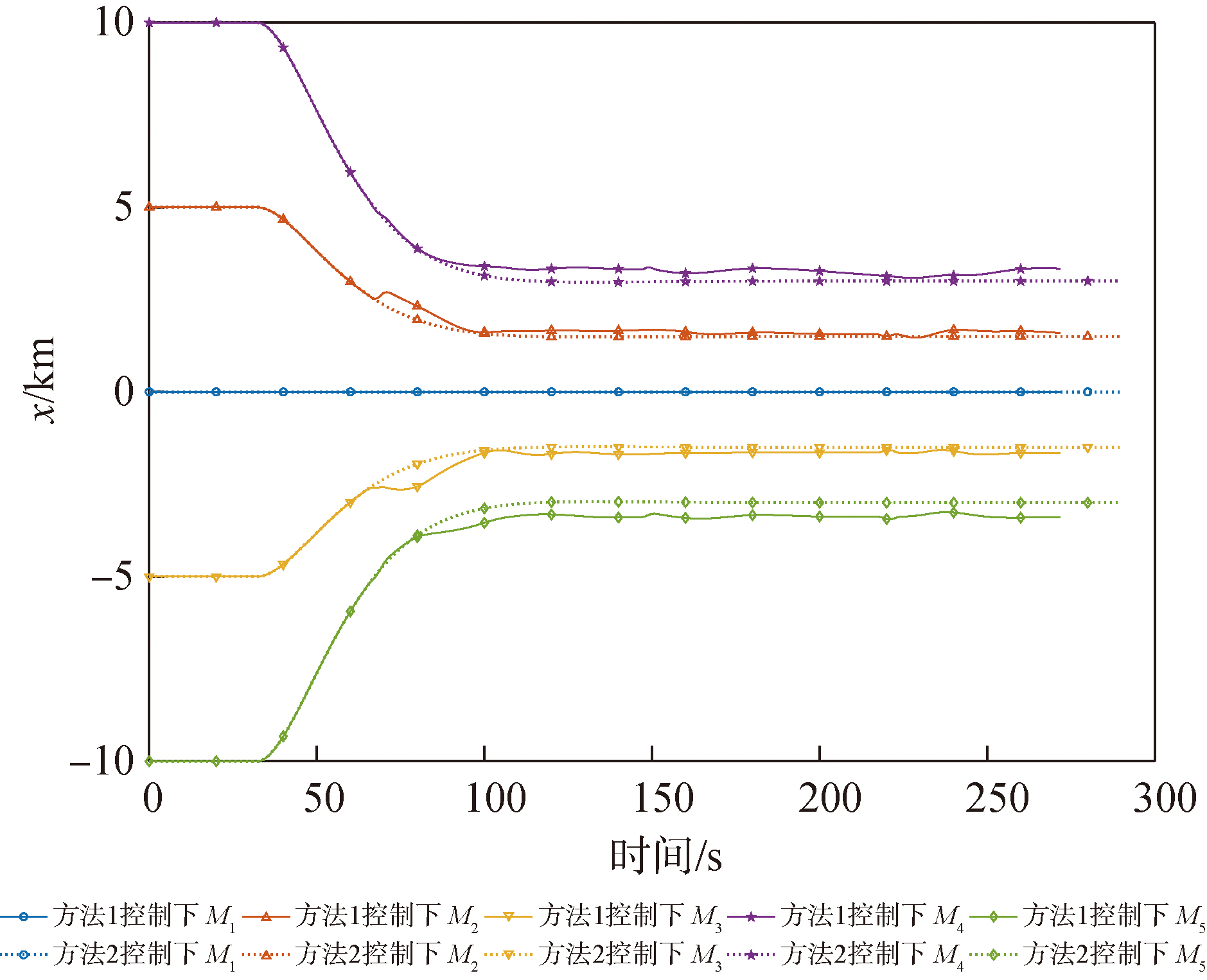
Fig.10 Comparison of launch direction adjustments in ground trajectories for Mission 2
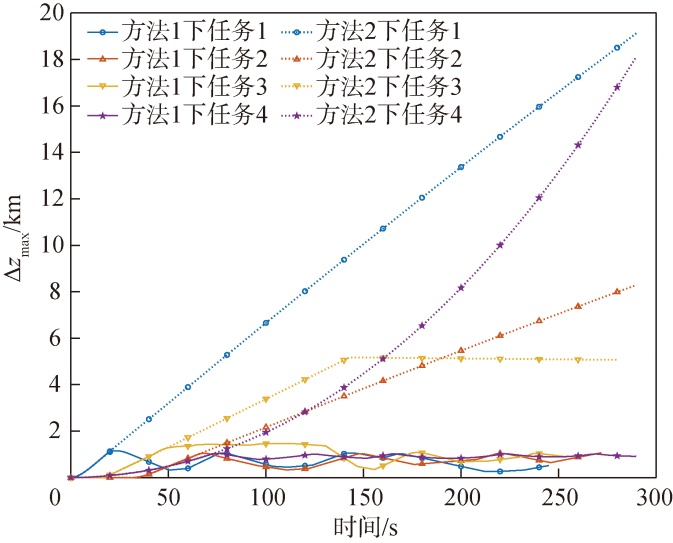
Fig.11 Curves of maximum distance variation in launch direction for formations in each mission
| 方法 | 任务1 | 任务2 | 任务3 | 任务4 |
|---|---|---|---|---|
| 1 | 0.52 | 1.06 | 0.79 | 0.92 |
| 2 | 19.12 | 8.29 | 5.07 | 18.12 |
Table 5 The maximum terminal distance in launch direction of each mission km
| 方法 | 任务1 | 任务2 | 任务3 | 任务4 |
|---|---|---|---|---|
| 1 | 0.52 | 1.06 | 0.79 | 0.92 |
| 2 | 19.12 | 8.29 | 5.07 | 18.12 |

Fig.12 Comparison of collision avoidance controls in ground trajectories for Mission 2

Fig.13 Minimum spatial distance of formation in Mission 2
| [1] |
赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展[J]. 宇航学报, 2020, 41(10):1239-1250.
|
|
|
|
| [2] |
郭杰, 郑金库, 王浩凝, 等. 高超声速滑翔飞行器再入制导方法及热点问题研究综述[J]. 空天技术, 2022(1):54-63.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(增刊1):171-183.
|
|
|
|
| [6] |
韩嘉俊, 王小虎, 郝昀, 等. 带有时间约束的再入滑翔轨迹设计[J]. 宇航学报, 2020, 41(4):438-446.
|
|
|
|
| [7] |
王培臣, 闫循良, 南汶江, 等. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7):2294-2305.
|
|
|
|
| [8] |
方科, 张庆振, 倪昆, 等. 飞行时间约束下的再入制导律[J]. 哈尔滨工业大学学报, 2019, 51(10):90-97.
|
|
|
|
| [9] |
王肖, 郭杰, 唐胜景, 等. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40(3):239-250.
|
|
|
|
| [10] |
|
| [11] |
张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7):1400-1411.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
李文, 尚腾, 姚寅伟, 等. 速度时变情况下多飞行器时间协同制导方法研究[J]. 兵工学报, 2020, 41(6):1096-1110.
|
|
|
|
| [17] |
许强强. 高超声速多飞行器编队协同动力学研究[D]. 长沙: 国防科学技术大学, 2016.
|
|
|
|
| [18] |
水晓冰, 王晓芳, 林平, 等. 高超声速飞行器编队控制方法[J]. 战术导弹技术, 2020(5):139-148.
|
|
|
|
| [19] |
李兆亭. 高超声速滑翔导弹集群控制方法研究[D]. 长沙: 国防科技大学, 2018.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [1] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [2] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||