
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (5): 240743-.doi: 10.12382/bgxb.2024.0743
Special Issue: 蓝色智慧·兵器科学与技术
Previous Articles Next Articles
WANG Yitao1, WANG Junsen1,2, SHI Zhangsong2,*( ), XU Huihui2, ZHU Weiming2
), XU Huihui2, ZHU Weiming2
Received:2024-08-29
Online:2025-05-07
Contact:
SHI Zhangsong
CLC Number:
WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net[J]. Acta Armamentarii, 2025, 46(5): 240743-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Comparison of RRT algorithm(upper) and ERRT algorithm(below)
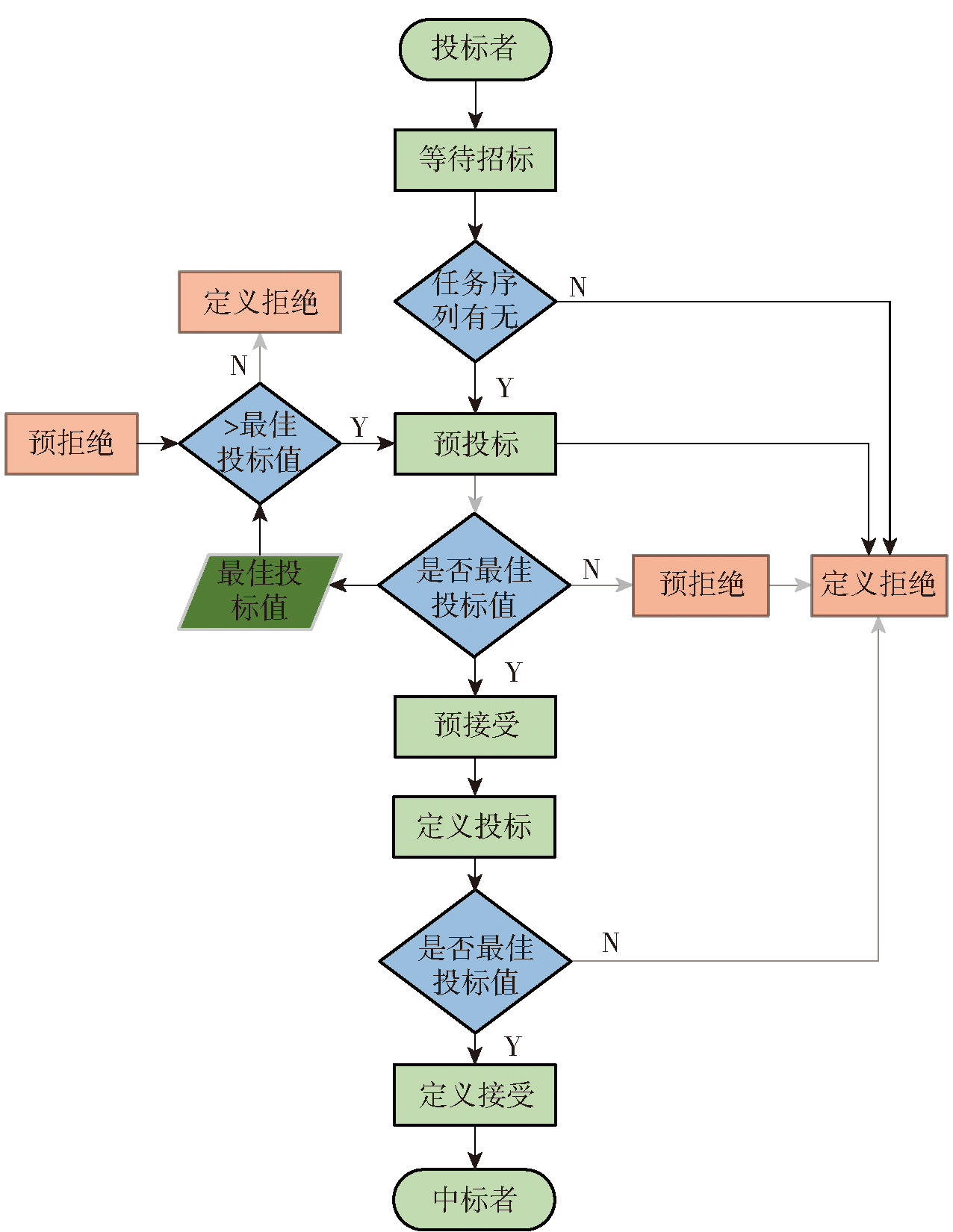
Fig.2 Agent bidding transformation
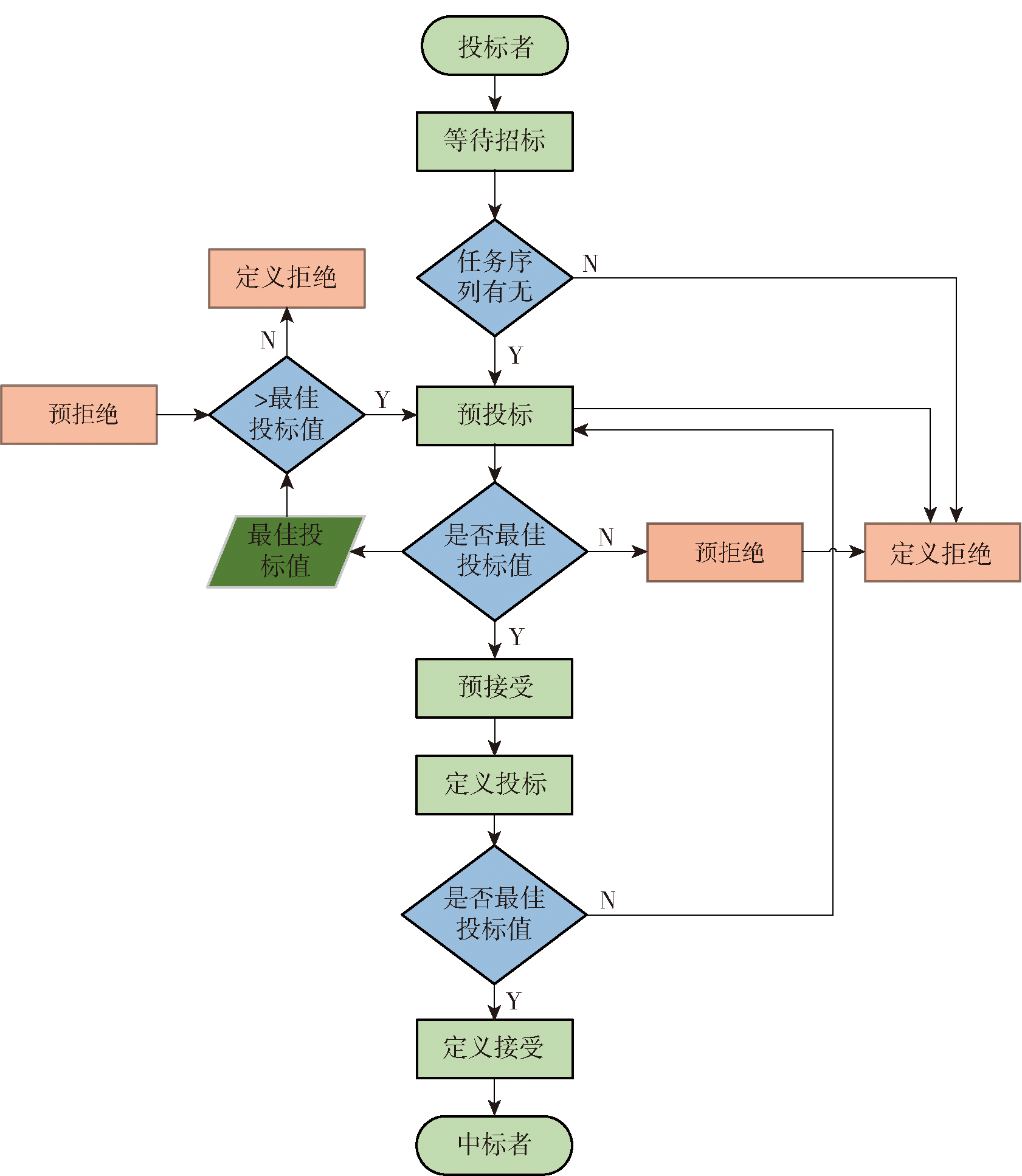
Fig.3 Improved agent bidding transformation
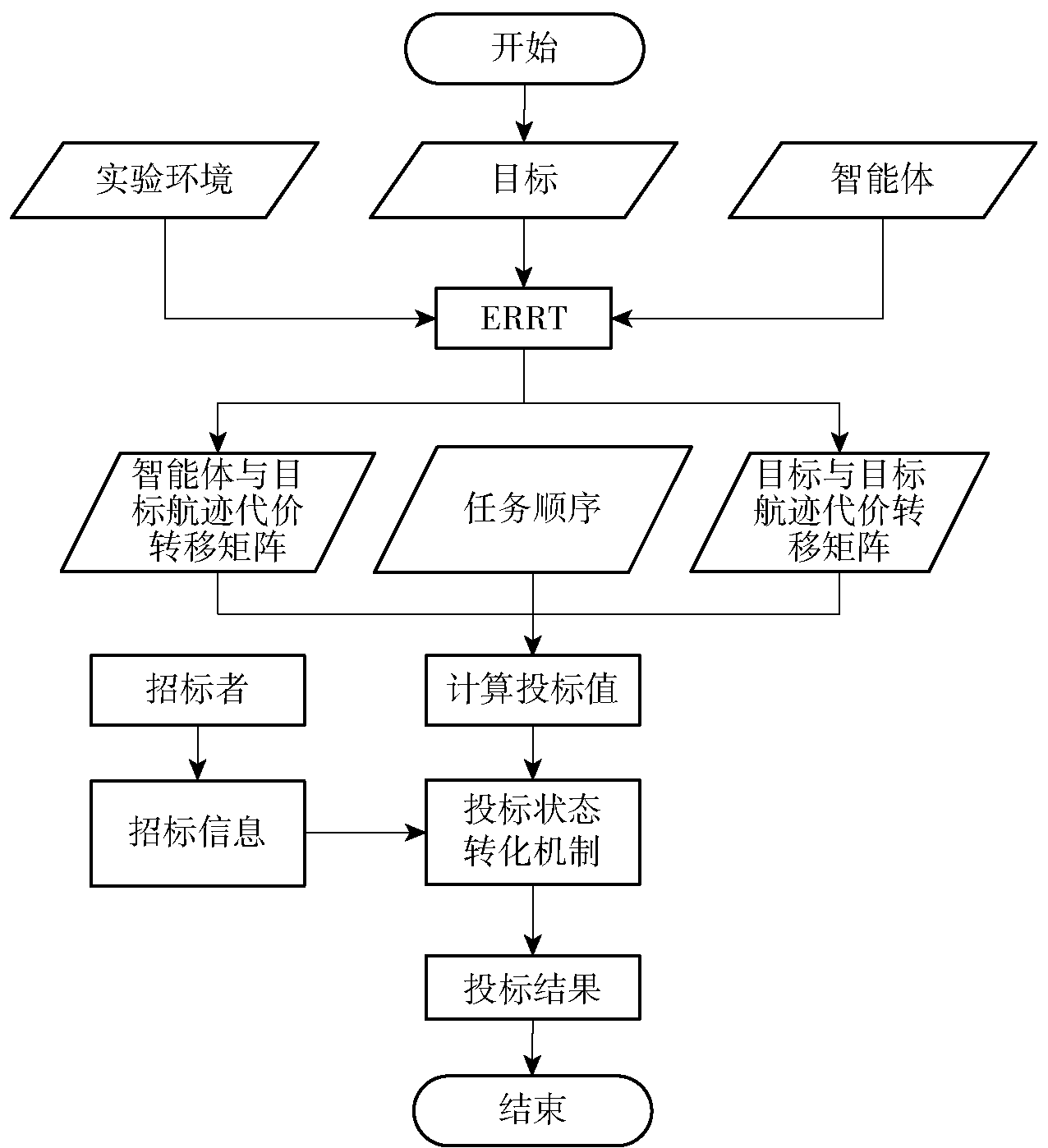
Fig.4 Flow chart of the proposed algorithm

Fig.5 DEM of test scene

Fig.6 3-D test scene
| 智能体 | 位置/ km | 速度/ (m·s-1) | 任务序列 |
|---|---|---|---|
| A1 | (1,1,1.68) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | (1,10.0,1.49) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A3 | (1,20.0,2.95) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A4 | (1,30.0,2.5) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A5 | (1,40.0,1.26) | 150 | [6,3,7,8,5,1,2,4,9,10] |
Table 1 Information of agents
| 智能体 | 位置/ km | 速度/ (m·s-1) | 任务序列 |
|---|---|---|---|
| A1 | (1,1,1.68) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | (1,10.0,1.49) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A3 | (1,20.0,2.95) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A4 | (1,30.0,2.5) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A5 | (1,40.0,1.26) | 150 | [6,3,7,8,5,1,2,4,9,10] |
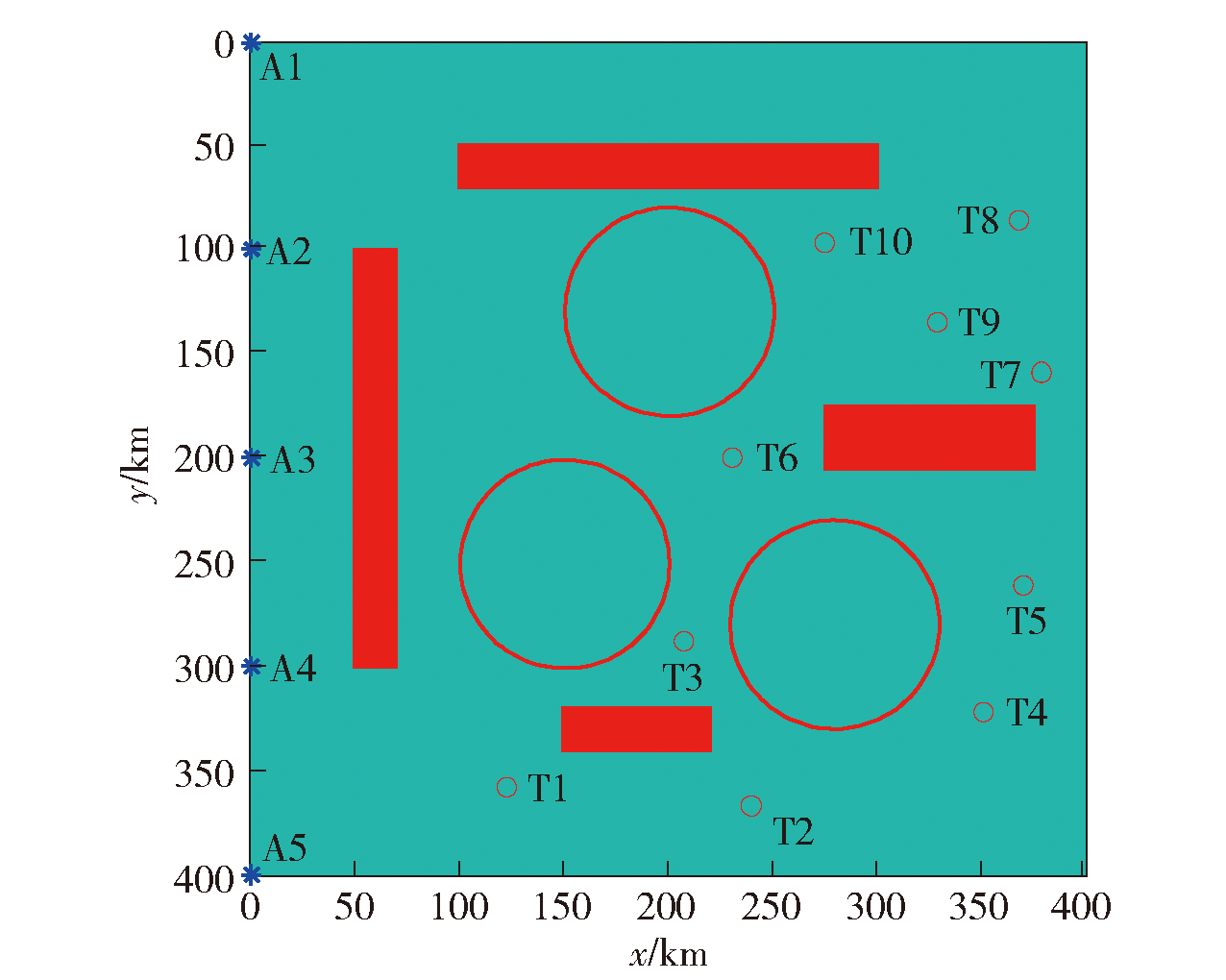
Fig.7 Positions of agents and targets
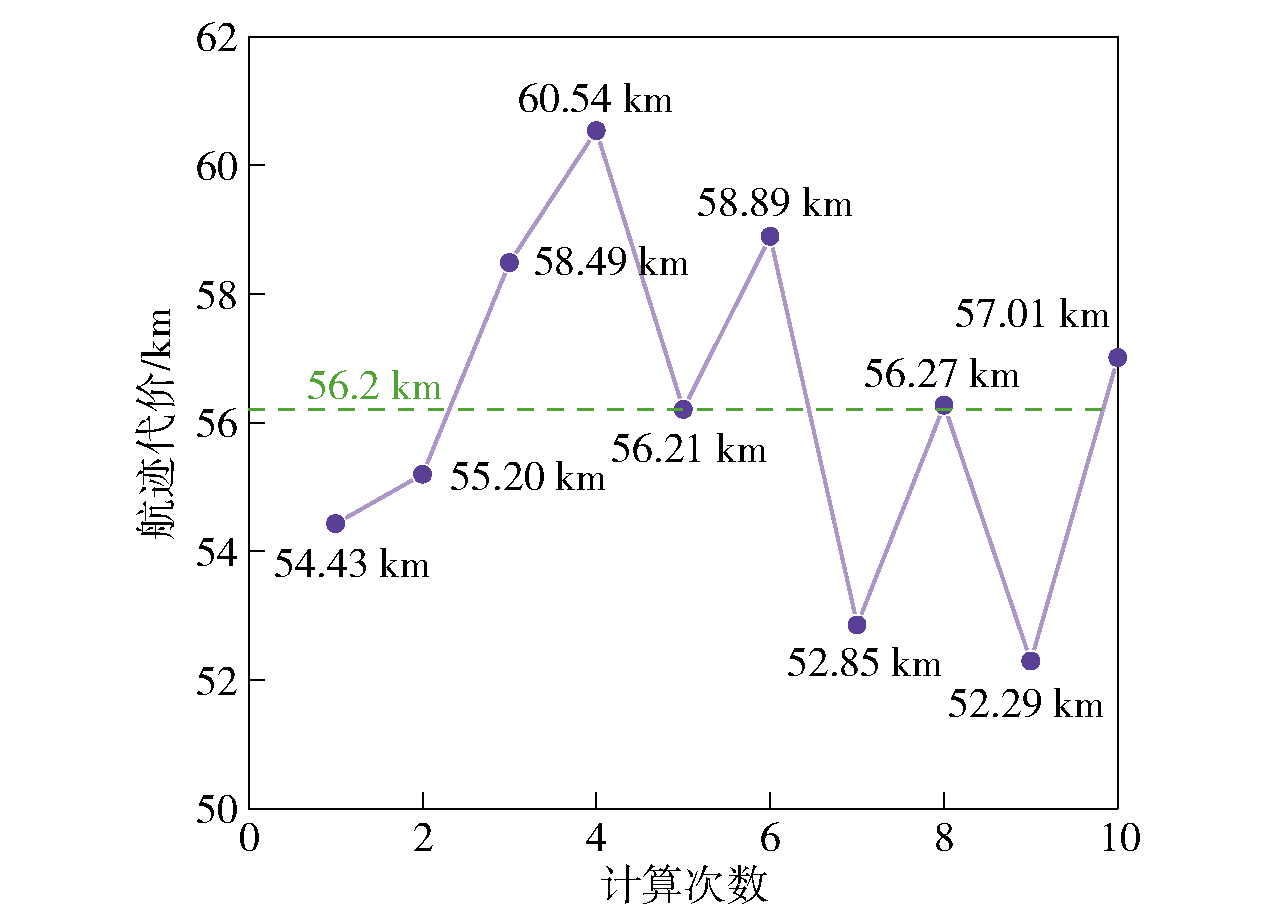
Fig.8 Track costs and average

Fig.9 Track costs of agents and targets calculated by ERRT algorithm

Fig.10 Track costs of targets calculated by ERRT algorithm
| 任务编号 | 位置/km | 任务编号 | 位置/km |
|---|---|---|---|
| T1 | (12.3,35.8,1.65) | T6 | (23.1,20.0,4.86) |
| T2 | (24.0,36.7,2.31) | T7 | (37.9,15.9,2.73) |
| T3 | (20.8,28.8,2.22) | T8 | (36.8,8.6,3.80) |
| T4 | (35.1,32.2,2.62) | T9 | (32.9,13.5,4.94) |
| T5 | (37.0,26.1,2.21) | T10 | (27.5,9.7,2.83) |
Table 2 Information of tasks
| 任务编号 | 位置/km | 任务编号 | 位置/km |
|---|---|---|---|
| T1 | (12.3,35.8,1.65) | T6 | (23.1,20.0,4.86) |
| T2 | (24.0,36.7,2.31) | T7 | (37.9,15.9,2.73) |
| T3 | (20.8,28.8,2.22) | T8 | (36.8,8.6,3.80) |
| T4 | (35.1,32.2,2.62) | T9 | (32.9,13.5,4.94) |
| T5 | (37.0,26.1,2.21) | T10 | (27.5,9.7,2.83) |

Fig.11 Euclidean distances among agents and targets

Fig.12 Euclidean distances between targets
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|
| 0.847 | 0.717 | 0.867 | 0.887 | 0.820 | 0.368 | 0.608 | 0.779 | 0.894 | 0.905 |
Table 3 Target strike cost
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|
| 0.847 | 0.717 | 0.867 | 0.887 | 0.820 | 0.368 | 0.608 | 0.779 | 0.894 | 0.905 |
| 任务 | 方案1 | 方案2 | 任务 | 方案1 | 方案2 | |
|---|---|---|---|---|---|---|
| T1 | A5 | A4 | T6 | A3 | A2 | |
| T2 | A5 | A4 | T7 | A2 | A1 | |
| T3 | A4 | A4 | T8 | A1 | A3 | |
| T4 | A5 | A5 | T9 | A1 | A1 | |
| T5 | A4 | A5 | T10 | A1 | A1 |
Table 4 Comparision of task allocations
| 任务 | 方案1 | 方案2 | 任务 | 方案1 | 方案2 | |
|---|---|---|---|---|---|---|
| T1 | A5 | A4 | T6 | A3 | A2 | |
| T2 | A5 | A4 | T7 | A2 | A1 | |
| T3 | A4 | A4 | T8 | A1 | A3 | |
| T4 | A5 | A5 | T9 | A1 | A1 | |
| T5 | A4 | A5 | T10 | A1 | A1 |
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A3 | 5 |
| T4 | A5 | 4 | T9 | A1 | 5 |
| T5 | A5 | 4 | T10 | A1 | 5 |
Table 5 Bidding results of agents
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A3 | 5 |
| T4 | A5 | 4 | T9 | A1 | 5 |
| T5 | A5 | 4 | T10 | A1 | 5 |
| 智能体 | 执行任务的 总航迹代价/km | 智能体 | 执行任务的 总航迹代价/km |
|---|---|---|---|
| A1 | 70.4 | A4 | 65.16 |
| A2 | 34.74 | A5 | 63.8 |
| A3 | 59.04 |
Table 6 Task loads of agents
| 智能体 | 执行任务的 总航迹代价/km | 智能体 | 执行任务的 总航迹代价/km |
|---|---|---|---|
| A1 | 70.4 | A4 | 65.16 |
| A2 | 34.74 | A5 | 63.8 |
| A3 | 59.04 |
| 智能体 | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 188 | 203 | 54 | 219 | 143 | 41 | 91 | 101 | 256 | 265 |
| A2 | 183 | 197 | 49 | 213 | 138 | 35 | 86 | 95 | 251 | 260 |
| A3 | 195 | 210 | 61 | 226 | 150 | 48 | 98 | 108 | 263 | 272 |
| A4 | 184 | 198 | 50 | 214 | 139 | 36 | 87 | 96 | 252 | 261 |
| A5 | 190 | 204 | 56 | 220 | 145 | 42 | 93 | 102 | 258 | 267 |
Table 7 Bidding values of agents
| 智能体 | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 188 | 203 | 54 | 219 | 143 | 41 | 91 | 101 | 256 | 265 |
| A2 | 183 | 197 | 49 | 213 | 138 | 35 | 86 | 95 | 251 | 260 |
| A3 | 195 | 210 | 61 | 226 | 150 | 48 | 98 | 108 | 263 | 272 |
| A4 | 184 | 198 | 50 | 214 | 139 | 36 | 87 | 96 | 252 | 261 |
| A5 | 190 | 204 | 56 | 220 | 145 | 42 | 93 | 102 | 258 | 267 |
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A2 | 7 |
| T4 | A5 | 4 | T9 | A3 | 8 |
| T5 | A5 | 4 | T10 | A3 | 8 |
Table 8 Bidding results of agents
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A2 | 7 |
| T4 | A5 | 4 | T9 | A3 | 8 |
| T5 | A5 | 4 | T10 | A3 | 8 |
| 智能体 | 任务负载/km | 智能体 | 任务负载/km |
|---|---|---|---|
| A1 | 54.76 | A4 | 65.16 |
| A2 | 59.62 | A5 | 63.8 |
| A3 | 65.79 |
Table 9 Task loads of agents
| 智能体 | 任务负载/km | 智能体 | 任务负载/km |
|---|---|---|---|
| A1 | 54.76 | A4 | 65.16 |
| A2 | 59.62 | A5 | 63.8 |
| A3 | 65.79 |

Fig.13 Comparison of agents’ task loads
| 智能体 | 任务序列 |
|---|---|
| A1 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | [10,3,1,9,5,8,6,7,2,4] |
| A3 | [3,6,5,7,4,8,9,1,10,2] |
| A4 | [2,7,10,9,6,5,4,1,3,8] |
| A5 | [9,5,8,3,10,4,1,2,5,6] |
Table 10 Task sequence
| 智能体 | 任务序列 |
|---|---|
| A1 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | [10,3,1,9,5,8,6,7,2,4] |
| A3 | [3,6,5,7,4,8,9,1,10,2] |
| A4 | [2,7,10,9,6,5,4,1,3,8] |
| A5 | [9,5,8,3,10,4,1,2,5,6] |
| 任务 | 方案3 | 方案4 | 任务 | 方案3 | 方案4 |
|---|---|---|---|---|---|
| T1 | A4 | A4 | T6 | A1 | A1 |
| T2 | A4 | A4 | T7 | A1 | A1 |
| T3 | A2 | A2 | T8 | A5 | A5 |
| T4 | A3 | A3 | T9 | A5 | A5 |
| T5 | A1 | A1 | T10 | A2 | A2 |
Table 11 Comparision of task allocations
| 任务 | 方案3 | 方案4 | 任务 | 方案3 | 方案4 |
|---|---|---|---|---|---|
| T1 | A4 | A4 | T6 | A1 | A1 |
| T2 | A4 | A4 | T7 | A1 | A1 |
| T3 | A2 | A2 | T8 | A5 | A5 |
| T4 | A3 | A3 | T9 | A5 | A5 |
| T5 | A1 | A1 | T10 | A2 | A2 |
| [1] |
孙海文, 于邵祯, 江源, 等. 海上无人机蜂群目标威胁评估方法[J]. 兵工学报, 2022, 43(增刊2):32-39.
|
|
doi: 10.12382/bgxb.2022.B006 |
|
| [2] |
邱志明, 孟祥尧, 马焱, 等. 海上无人系统跨域协同运用与技术发展[J]. 水下无人系统学报, 2024, 32(2):184-193.
|
|
|
|
| [3] |
唐苏妍, 朱一凡, 李群, 等. 多Agent系统任务分配方法综述[J]. 系统工程与电子技术, 2010, 32(10):2155-2161.
|
|
doi: 10.3969/j.issn.1001-506X.2010.10.30 |
|
| [4] |
齐小刚, 李博, 范英盛, 等. 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15(2):204-217.
|
|
|
|
| [5] |
马婵. 多无人机任务分配与航迹规划协同方法研究[D]. 石家庄: 河北科技大学, 2023.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
万路军, 姚佩阳, 周翔翔, 等. 有人/无人作战智能体分布式协同目标分配方法[J]. 系统工程与电子技术, 2014, 36(2):278-287.
|
|
|
|
| [16] |
张梦颖, 王蒙一, 王晓东, 等. 基于改进合同网的无人机群协同实时任务分配问题研究[J]. 航空兵器, 2019, 26(4):38-46.
|
|
|
|
| [17] |
王强, 贾强. 基于改进合同网的多无人机动态任务分配[J/OL]. 火炮发射与控制学报, 2023. https://doi.org/10.19323/j.issn.1673-6524.202304010.
|
|
|
|
| [18] |
唐安如. 无人机航迹规划与任务分配方法研究[D]. 无锡: 江南大学, 2023.
|
|
|
|
| [19] |
赵明. 多无人机系统的协同目标分配和航迹规划方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
|
| [6] |
周晶, 赵晓哲, 许震, 等. 基于D-NSGA-Ⅲ算法的无人机群高维多目标任务分配方法[J]. 系统工程与电子技术, 2021, 43(5):1240-1247.
doi: 10.12305/j.issn.1001-506X.2021.05.11 |
|
doi: 10.12305/j.issn.1001-506X.2021.05.11 |
|
| [7] |
侯鹏, 葛玉雪, 裴扬, 等. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2):240212.
doi: 10.12382/bgxb.2024.0212 |
|
|
|
| [8] |
薛雅丽, 李寒雁, 欧阳权, 等. 战场环境下遗传黏菌算法的多机协同任务分配[J]. 浙江大学学报(工学版), 2024, 58(8):1748-1756.
|
|
|
|
| [9] |
胡月. 有人/无人机协同作战任务分配与航迹规划研究[D]. 南京: 南京航空航天大学, 2020.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [19] |
|
| [20] |
霍凤财, 迟金, 黄梓健, 等. 移动机器人路径规划算法综述[J]. 吉林大学学报(信息科学版), 2018, 36(6):639-647.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
doi: 10.1109/tip.2003.819861 pmid: 15376593 |
| [24] |
刘跃峰, 张安. 有人机/无人机编队协同任务分配方法[J]. 系统工程与电子技术, 2010, 32(3):584-588.
|
|
|
|
| [25] |
邓启波. 多无人机协同任务规划技术研究[D]. 北京: 北京理工大学, 2014.
|
|
|
|
| [26] |
|
| [1] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [2] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [3] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [4] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [5] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| [6] | SUN Yujie, SU Bo, DUAN Leyi, JI Chao, YANG Chaonan. A Reconnaissance Task Allocation Algorithm for Air-Ground Heterogeneous Unmanned System [J]. Acta Armamentarii, 2024, 45(S2): 317-328. |
| [7] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [8] | NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3204-3215. |
| [9] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [10] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [11] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [12] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [13] | MA Xiao, LI Xinqi, LIU Zhenyuan, DI Chao. A Fast Target Tracking Method Based on BACF [J]. Acta Armamentarii, 2024, 45(2): 497-503. |
| [14] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [15] | DU Weiwei, CHEN Xiaowei. Review of Tactical-level Task Planning Method [J]. Acta Armamentarii, 2024, 45(10): 3341-3355. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||