
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240161-.doi: 10.12382/bgxb.2024.0161
Previous Articles Next Articles
JIN Zhe, JIANG Chaoyang*( )
)
Received:2024-03-06
Online:2025-03-26
Contact:
JIANG Chaoyang
CLC Number:
JIN Zhe, JIANG Chaoyang. Degeneration Correction of LiDAR SLAM for UGV Leapfrog Cooperation[J]. Acta Armamentarii, 2025, 46(3): 240161-.
Add to citation manager EndNote|Ris|BibTeX
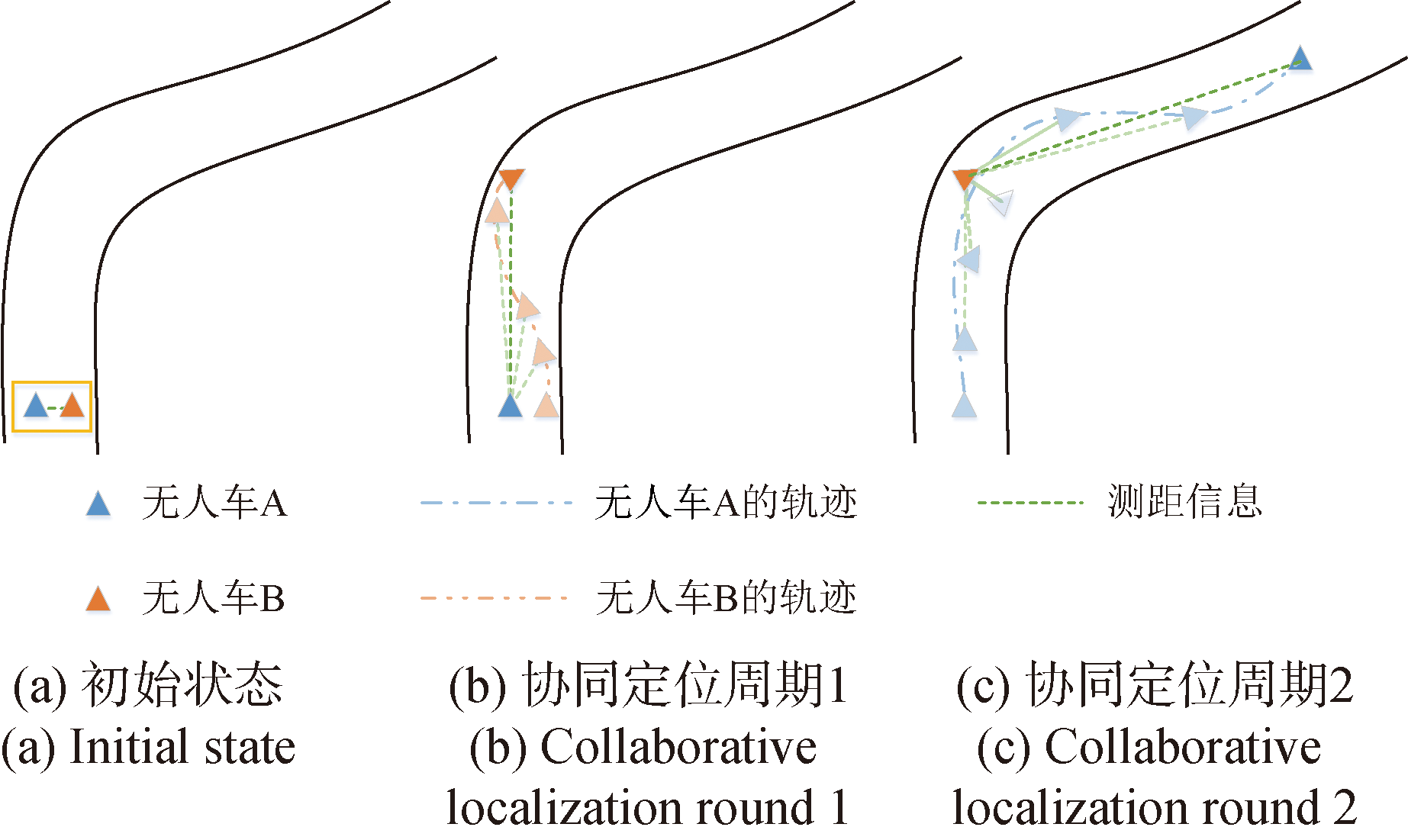
Fig.1 Schematic diagram of UGV leapfrog collaborative localization
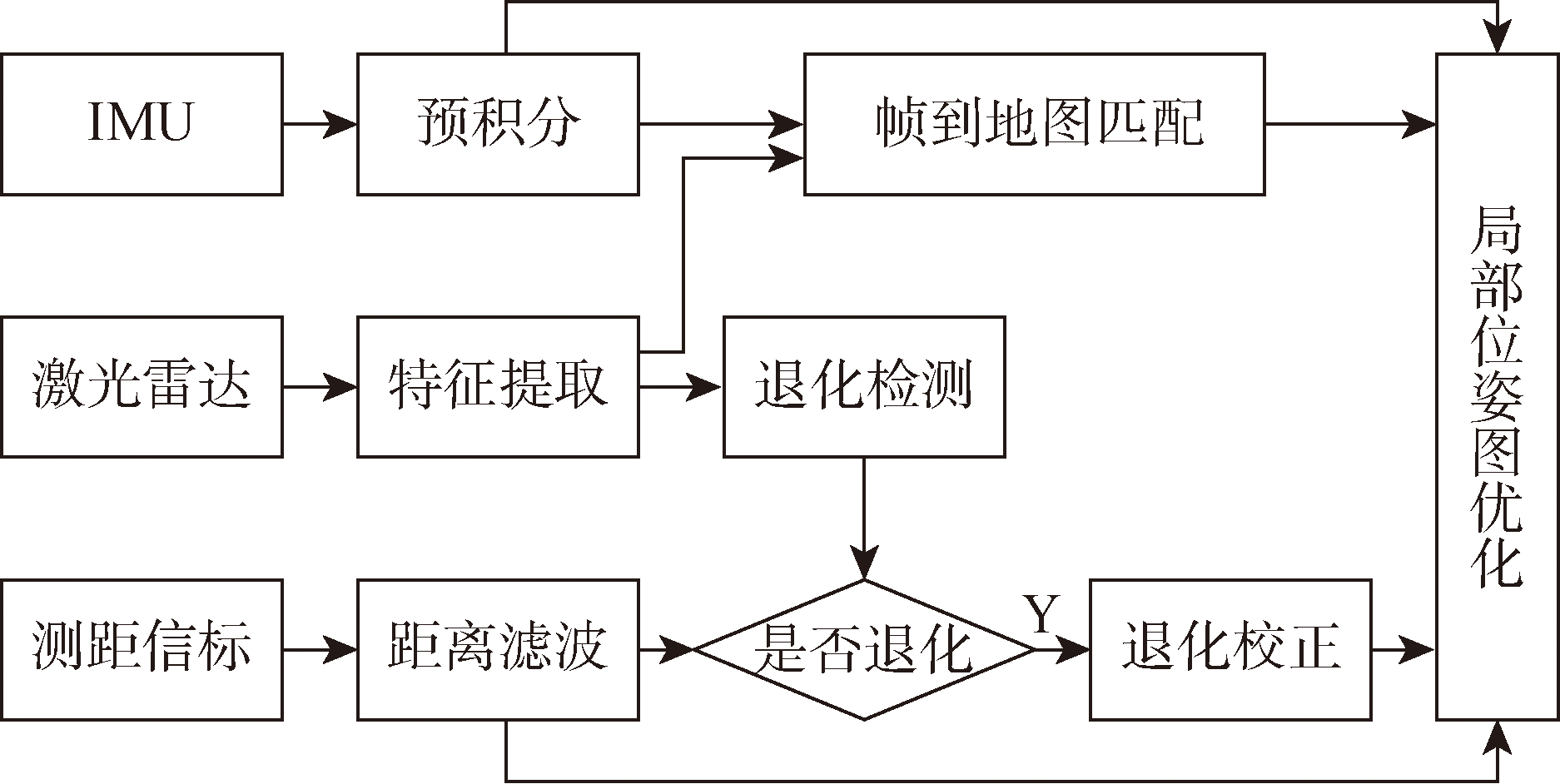
Fig.2 System framework
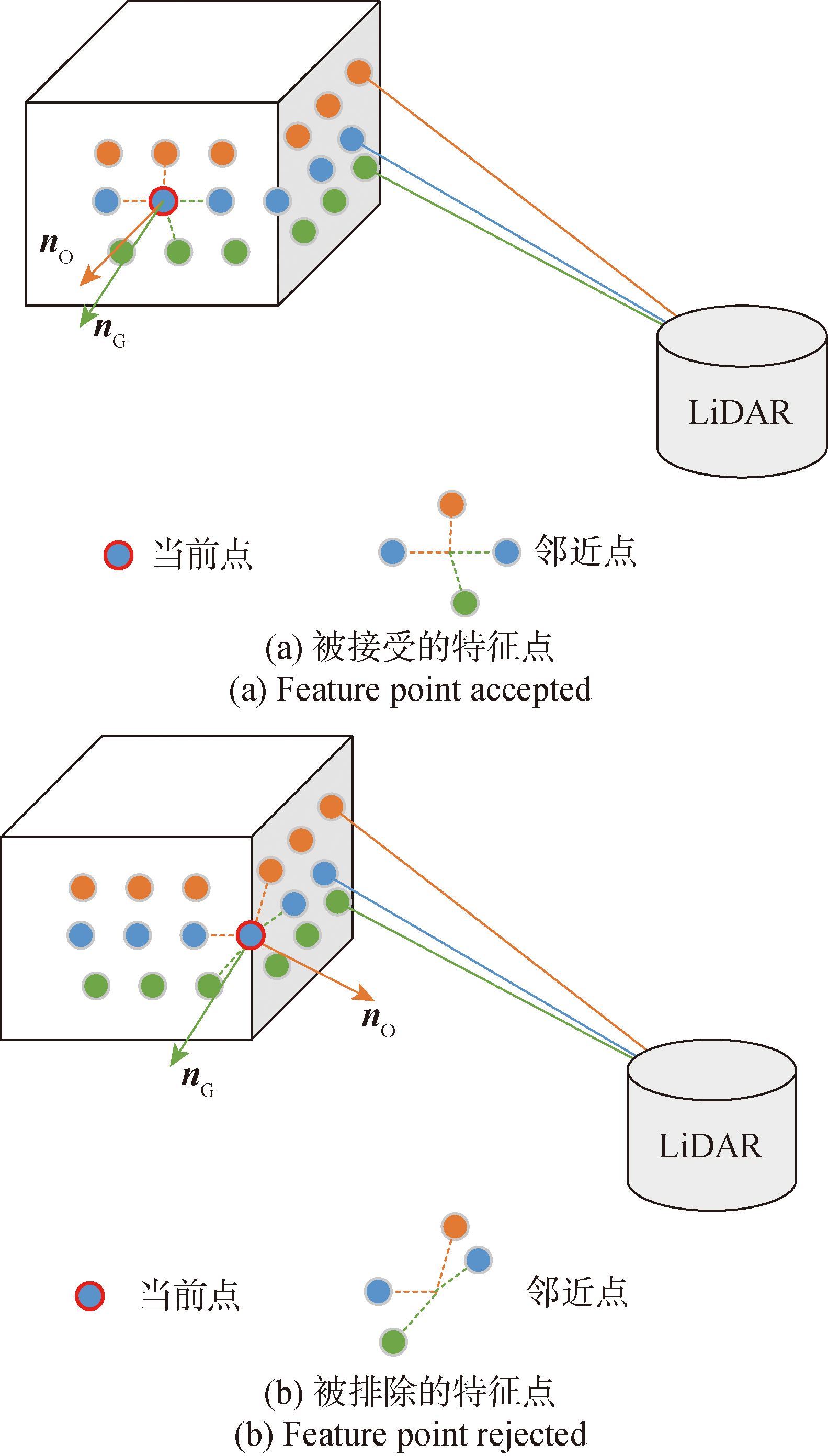
Fig.3 LiDAR point cloud feature extraction

Fig.4 Degradation detection based on the characteristics of normal vector distribution in point cloud
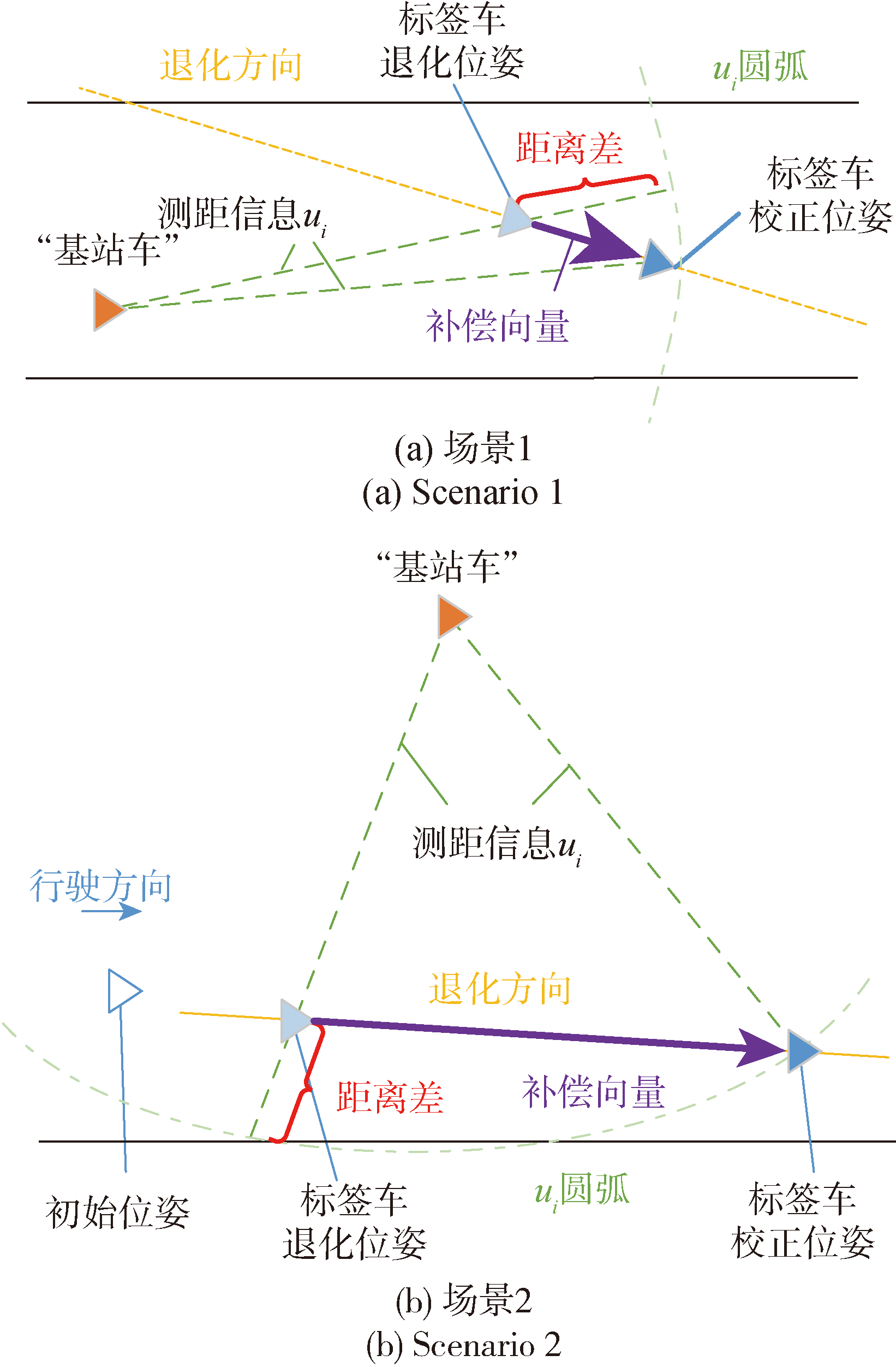
Fig.5 Degradation correction based on ranging information

Fig.6 Experimental platforms and experimental scenario
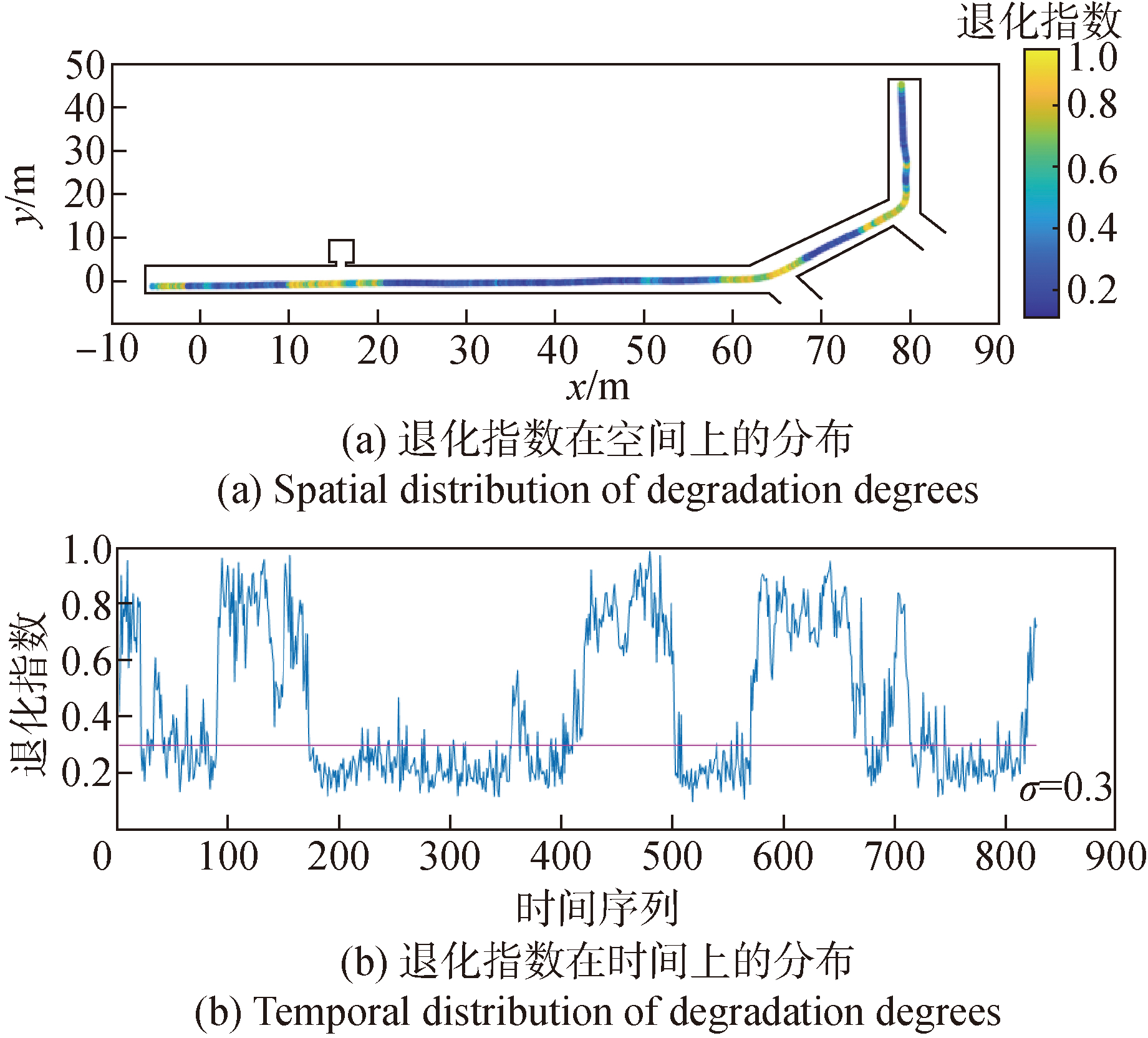
Fig.7 Distribution of degradation degrees in experimental scenarios
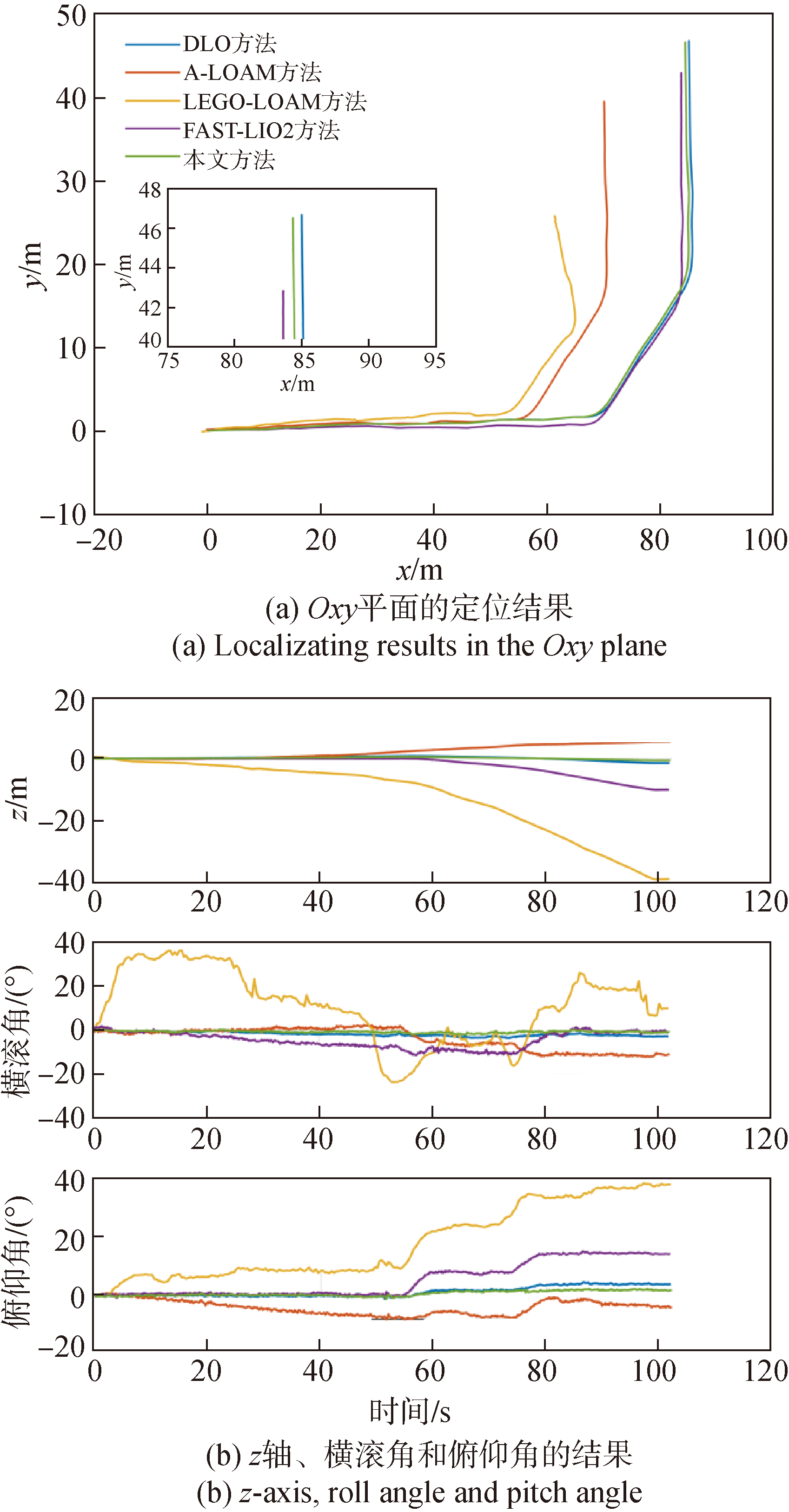
Fig.8 Localizating results of different methods
| 方法 | 平均距离/m | 距离标准差/m |
|---|---|---|
| DLO | 0.089735 | 0.122395 |
| A-LOAM | 偏差较大 | |
| LeGO-LOAM | 偏差较大 | |
| FAST-LIO2 | 0.133153 | 0.142496 |
| LIO-SAM | 失效 | |
| 本文方法 | 0.083232 | 0.0927721 |
Table 1 Statistical results of point-mesh distances of mapping results of the different methods
| 方法 | 平均距离/m | 距离标准差/m |
|---|---|---|
| DLO | 0.089735 | 0.122395 |
| A-LOAM | 偏差较大 | |
| LeGO-LOAM | 偏差较大 | |
| FAST-LIO2 | 0.133153 | 0.142496 |
| LIO-SAM | 失效 | |
| 本文方法 | 0.083232 | 0.0927721 |
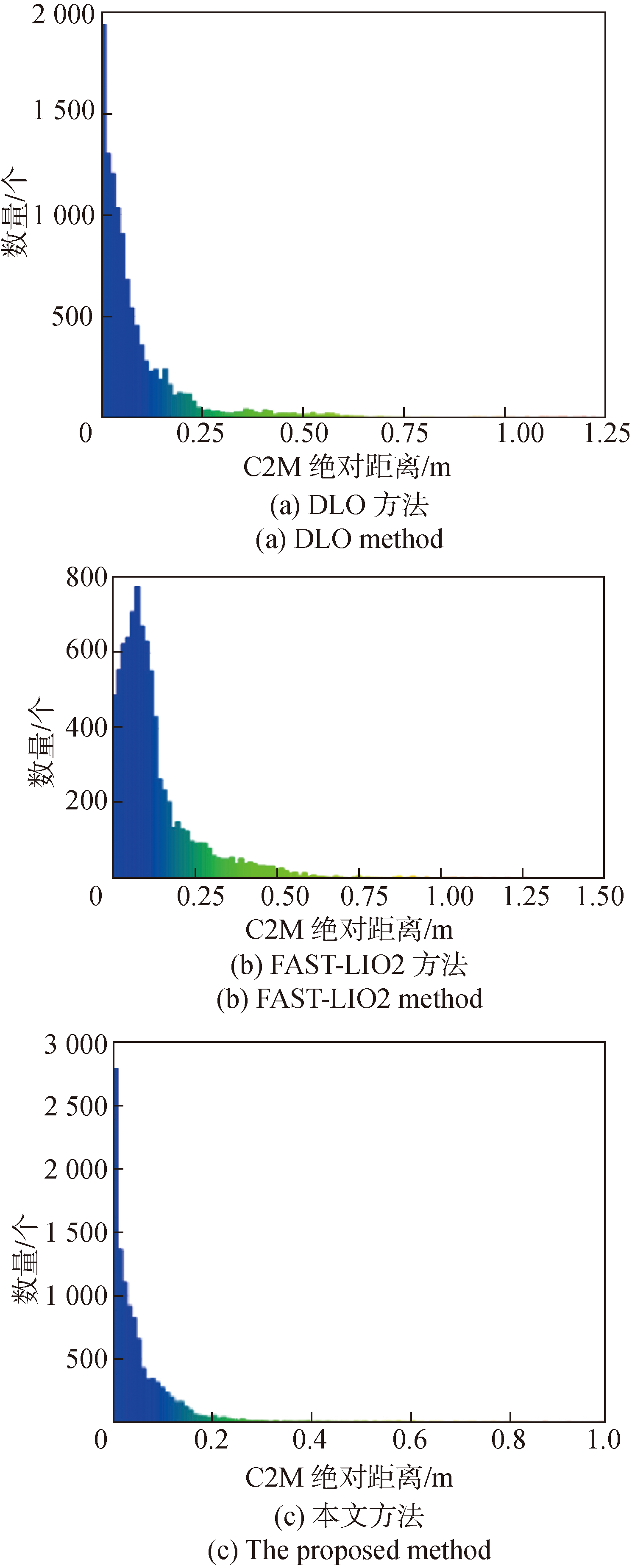
Fig.9 Distributions of point-mesh distances of mapping results of the different methods
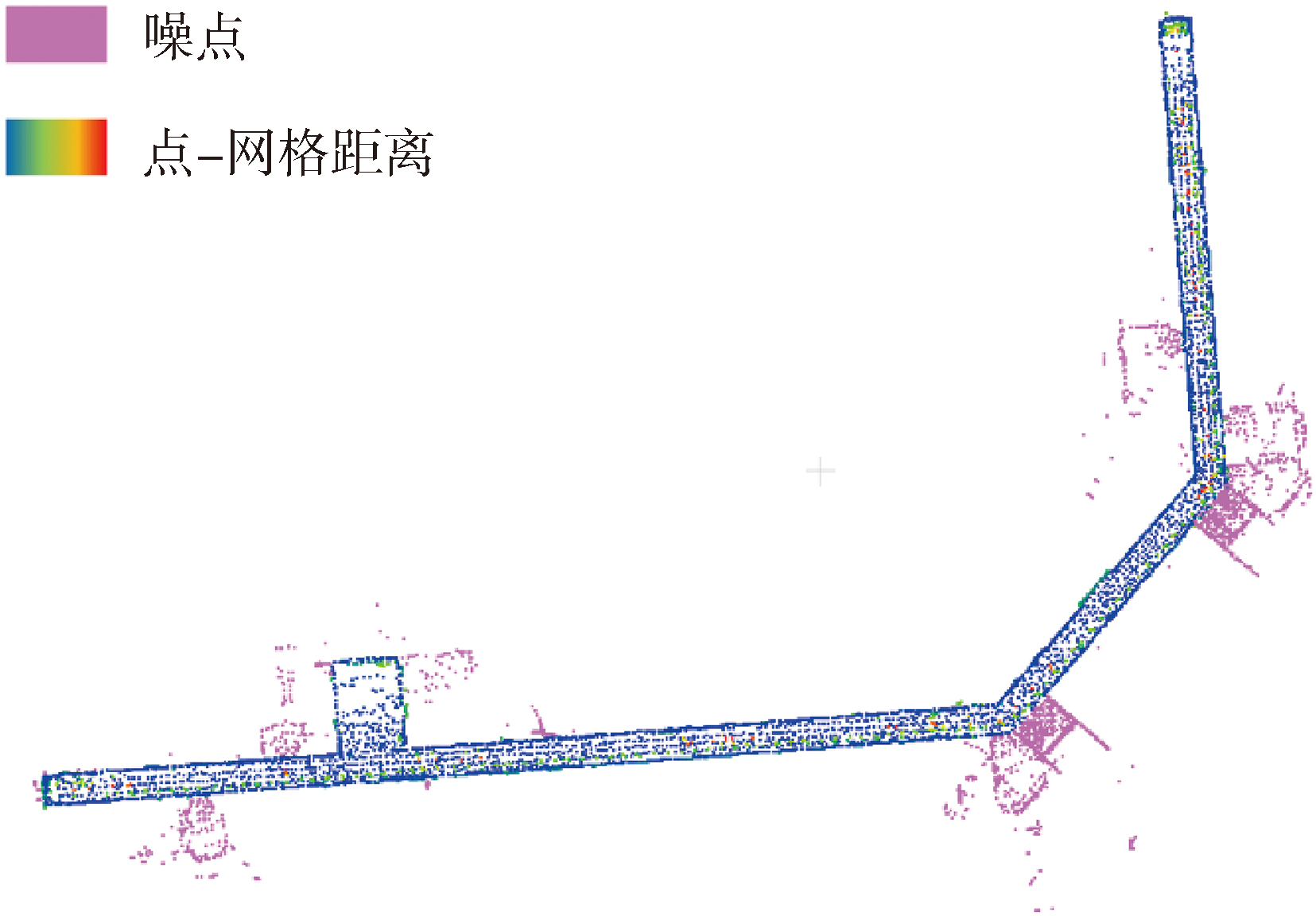
Fig.10 Mapping results of the proposed method
| [1] |
陈炜军, 邹庆, 涂卫军. 空面武器智能化发展趋势与应用[J]. 直升机技术, 2021(2):69-72.
|
|
|
|
| [2] |
邓廷祥, 任鹏, 程甲, 等. 面向集群协同的两点相对定位技术[J]. 兵工学报, 2023, 44(增刊2):22-34.
|
|
doi: 10.12382/bgxb.2023.0829 |
|
| [3] |
曹昊哲, 刘全攀. 基于半直接法的无人集群协同视觉SLAM算法[J]. 兵工学报, 2023, 44(11):3345-3358.
doi: 10.12382/bgxb.2023.0547 |
|
doi: 10.12382/bgxb.2023.0547 |
|
| [4] |
|
| [5] |
郑磊, 陈志敏, 贾宇轩. 基于广域部署智能反射面的无人机集群跟踪方法[J]. 兵工学报, 2023, 44(6):1837-1845.
doi: 10.12382/bgxb.2022.0217 |
|
doi: 10.12382/bgxb.2022.0217 |
|
| [6] |
曹正阳, 张冰, 白屹轩, 等. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(增刊2):157-166.
|
|
doi: 10.12382/bgxb.2023.0860 |
|
| [7] |
郑壮壮, 曹万科, 邹渊, 等. 动态环境下无人地面车辆点云地图快速重定位方法[J]. 兵工学报, 2020, 41(8):1581-1589.
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
| [8] |
刘延旭. 面向无人机集群的多源融合定位关键技术研究[D]. 北京: 北京邮电大学, 2022.
|
|
|
|
| [9] |
陈超. 无人集群任务分配方法研究[D]. 长沙: 国防科学技术大学, 2023.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | XIAO Yang, SU Bo, JI Chao, YANG Dezhen, ZHOU Tong. System Safety Analysis of Unmanned Ground Vehicles Based on STPA Method and Bow-Tie Model [J]. Acta Armamentarii, 2024, 45(S2): 153-161. |
| [2] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [3] | LIU Yumin, CAI Zhihao, SUN Jialing, ZHAO Jiang, WANG Yingxun. Event-combined Visual-inertial Odometry Using Point and Line Features [J]. Acta Armamentarii, 2024, 45(11): 3926-3937. |
| [4] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [5] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [6] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [7] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [8] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [9] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [10] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [11] | GUAN Haijie, WANG Boyang, WANG Xurui, LIU Hai’ou, CHEN Huiyan. A Review on the Development of Military Unmanned Ground System with Mission Payload [J]. Acta Armamentarii, 2023, 44(11): 3333-3344. |
| [12] | SUN Yang, CHEN Hui-yan. Research on Test and Evaluation of Unmanned Ground Vehicles [J]. Acta Armamentarii, 2015, 36(6): 978-986. |
| [13] | CHEN Hui-yan, ZHANG Yu. An Overview of Research on Military Unmanned Ground Vehicles [J]. Acta Armamentarii, 2014, 35(10): 1696-1706. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||