
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240079-.doi: 10.12382/bgxb.2024.0079
Previous Articles Next Articles
LUAN Kedi1, GUO Baoqiao1,*( ), WEI Zhongliang2, GU Yuansen1, WANG Gangting3, DENG Lisha1, CHEN Pengwan1
), WEI Zhongliang2, GU Yuansen1, WANG Gangting3, DENG Lisha1, CHEN Pengwan1
Received:2024-01-25
Online:2024-04-18
Contact:
GUO Baoqiao
CLC Number:
LUAN Kedi, GUO Baoqiao, WEI Zhongliang, GU Yuansen, WANG Gangting, DENG Lisha, CHEN Pengwan. Effects of Armored Vehicle Multi-modal Interactions and Environmental Load on Mission Performance of Occupant[J]. Acta Armamentarii, 2025, 46(4): 240079-.
Add to citation manager EndNote|Ris|BibTeX
| 设备 | 参数 |
|---|---|
| 噪声发生设备 | 2.0声道,最大功率40W |
| 可调光强式光源 | 额定功率14.5W(72×0.2W/LED模块) |
| 数字照度计 | 量程0.1~99990lx、0.1~999.9lx,分度值0.1lx;1000~99990lx,分度值1lx |
| 数字噪声计 | 量程30~130dB,分度值0.1dB |
| 视频采集设备 | 300万像素,帧率30帧/s |
Table 1 Measuring and acquiring equipment and their parameters
| 设备 | 参数 |
|---|---|
| 噪声发生设备 | 2.0声道,最大功率40W |
| 可调光强式光源 | 额定功率14.5W(72×0.2W/LED模块) |
| 数字照度计 | 量程0.1~99990lx、0.1~999.9lx,分度值0.1lx;1000~99990lx,分度值1lx |
| 数字噪声计 | 量程30~130dB,分度值0.1dB |
| 视频采集设备 | 300万像素,帧率30帧/s |

Fig.1 Interface of armored vehicle virtual simulation software
Fig.2 Operating principle of vibration bracelet
Fig.3 Armored vehicle multi-modal human-computer interaction test system
Fig.4 Azimuth map of enemy vehicles relative to ours
| 序号 | 方位 |
|---|---|
| 1 | 东偏南45° |
| 2 | 东偏北45° |
| 3 | 东偏南10° |
| 4 | 东偏南50° |
| 5 | 东偏北10° |
| 6 | 东偏北50° |
Table 2 Enemy vehicles location information
| 序号 | 方位 |
|---|---|
| 1 | 东偏南45° |
| 2 | 东偏北45° |
| 3 | 东偏南10° |
| 4 | 东偏南50° |
| 5 | 东偏北10° |
| 6 | 东偏北50° |
| 因素1 | 因素2 | 因素3 |
|---|---|---|
| 低环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 高环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T |
Table 3 Setting of different experimental conditions
| 因素1 | 因素2 | 因素3 |
|---|---|---|
| 低环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 高环境负荷 | 机械输入 | V |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 触屏输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T | ||
| 语音输入 | V | |
| V+A | ||
| V+T | ||
| V+A+T |
| 实验编号类型 | 敌方车辆波次 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 奇数 | 1 | 2、5 | 6 | 3、4 |
| 偶数 | 2 | 1、3 | 4 | 5、6 |
Table 4 Order in which enemy vehicles appear in different modes
| 实验编号类型 | 敌方车辆波次 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 奇数 | 1 | 2、5 | 6 | 3、4 |
| 偶数 | 2 | 1、3 | 4 | 5、6 |
Fig.5 Reaction time and annihilation time
| 环境 负荷 | 输入 方式 | 输出 方式 | 反应时间/s | 任务完成时间/s | 操作错 误数 | 操作错 误率/% | ||
|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | |||||
| 低环 境负 荷 | 机械 输入 | V | 1.31 | 0.94 | 77.88 | 16.76 | 20 | 16.67 |
| V+A | 1.20 | 0.69 | 68.77 | 11.35 | 14 | 11.67 | ||
| V+T | 1.06 | 0.63 | 66.15 | 8.93 | 9 | 7.50 | ||
| V+A+T | 1.05 | 0.72 | 69.23 | 11.30 | 10 | 8.33 | ||
| 触屏 输入 | V | 2.01 | 0.89 | 75.18 | 10.74 | 1 | 0.83 | |
| V+A | 2.00 | 0.86 | 70.54 | 10.32 | 2 | 1.67 | ||
| V+T | 1.74 | 0.76 | 68.21 | 5.50 | 1 | 0.83 | ||
| V+A+T | 1.65 | 0.82 | 68.51 | 7.07 | 2 | 1.67 | ||
| 语音 输入 | V | 4.58 | 1.25 | 122.78 | 20.86 | 2 | 1.67 | |
| V+A | 4.22 | 1.09 | 112.23 | 13.61 | 3 | 2.50 | ||
| V+T | 4.20 | 1.34 | 105.88 | 8.84 | 0 | 0 | ||
| V+A+T | 3.93 | 0.93 | 118.90 | 13.09 | 2 | 1.67 | ||
| 高环 境负 荷 | 机械 输入 | V | 1.58 | 1.04 | 92.05 | 28.45 | 16 | 13.33 |
| V+A | 1.42 | 0.81 | 80.60 | 18.50 | 17 | 14.17 | ||
| V+T | 1.13 | 0.78 | 75.74 | 14.23 | 18 | 15.00 | ||
| V+A+T | 1.18 | 0.87 | 76.94 | 10.86 | 18 | 15.00 | ||
| 触屏 输入 | V | 2.35 | 1.32 | 89.36 | 15.18 | 6 | 5.00 | |
| V+A | 2.29 | 1.20 | 87.29 | 22.95 | 5 | 4.17 | ||
| V+T | 2.05 | 1.27 | 79.90 | 13.30 | 2 | 1.67 | ||
| V+A+T | 1.98 | 1.19 | 77.45 | 10.31 | 3 | 2.50 | ||
| 语音 输入 | V | 5.12 | 1.51 | 146.23 | 28.24 | 4 | 3.33 | |
| V+A | 4.74 | 1.23 | 123.57 | 17.82 | 3 | 2.5 | ||
| V+T | 4.29 | 0.97 | 123.33 | 12.16 | 1 | 0.83 | ||
| V+A+T | 5.97 | 1.38 | 163.92 | 24.22 | 0 | 0 | ||
Table 5 Descriptive statistical results of reaction time,mission completion time and operation error rate under different experimental conditions
| 环境 负荷 | 输入 方式 | 输出 方式 | 反应时间/s | 任务完成时间/s | 操作错 误数 | 操作错 误率/% | ||
|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | |||||
| 低环 境负 荷 | 机械 输入 | V | 1.31 | 0.94 | 77.88 | 16.76 | 20 | 16.67 |
| V+A | 1.20 | 0.69 | 68.77 | 11.35 | 14 | 11.67 | ||
| V+T | 1.06 | 0.63 | 66.15 | 8.93 | 9 | 7.50 | ||
| V+A+T | 1.05 | 0.72 | 69.23 | 11.30 | 10 | 8.33 | ||
| 触屏 输入 | V | 2.01 | 0.89 | 75.18 | 10.74 | 1 | 0.83 | |
| V+A | 2.00 | 0.86 | 70.54 | 10.32 | 2 | 1.67 | ||
| V+T | 1.74 | 0.76 | 68.21 | 5.50 | 1 | 0.83 | ||
| V+A+T | 1.65 | 0.82 | 68.51 | 7.07 | 2 | 1.67 | ||
| 语音 输入 | V | 4.58 | 1.25 | 122.78 | 20.86 | 2 | 1.67 | |
| V+A | 4.22 | 1.09 | 112.23 | 13.61 | 3 | 2.50 | ||
| V+T | 4.20 | 1.34 | 105.88 | 8.84 | 0 | 0 | ||
| V+A+T | 3.93 | 0.93 | 118.90 | 13.09 | 2 | 1.67 | ||
| 高环 境负 荷 | 机械 输入 | V | 1.58 | 1.04 | 92.05 | 28.45 | 16 | 13.33 |
| V+A | 1.42 | 0.81 | 80.60 | 18.50 | 17 | 14.17 | ||
| V+T | 1.13 | 0.78 | 75.74 | 14.23 | 18 | 15.00 | ||
| V+A+T | 1.18 | 0.87 | 76.94 | 10.86 | 18 | 15.00 | ||
| 触屏 输入 | V | 2.35 | 1.32 | 89.36 | 15.18 | 6 | 5.00 | |
| V+A | 2.29 | 1.20 | 87.29 | 22.95 | 5 | 4.17 | ||
| V+T | 2.05 | 1.27 | 79.90 | 13.30 | 2 | 1.67 | ||
| V+A+T | 1.98 | 1.19 | 77.45 | 10.31 | 3 | 2.50 | ||
| 语音 输入 | V | 5.12 | 1.51 | 146.23 | 28.24 | 4 | 3.33 | |
| V+A | 4.74 | 1.23 | 123.57 | 17.82 | 3 | 2.5 | ||
| V+T | 4.29 | 0.97 | 123.33 | 12.16 | 1 | 0.83 | ||
| V+A+T | 5.97 | 1.38 | 163.92 | 24.22 | 0 | 0 | ||
| 自变量 | 反应时间 | 任务完成时间 | 操作错误数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f | F | p | 偏η2 | f | F | p | 偏η2 | f | F | p | 偏η2 | |
| 环境负荷 | 1 | 92.656 | <0.001** | 0.037 | 1 | 120.032 | <0.001** | 0.208 | 1 | 5.963 | 0.015 | 0.013 |
| 输入方式 | 2 | 2227.280 | <0.001** | 0.649 | 2 | 533.338 | <0.001** | 0.701 | 2 | 87.917 | <0.001** | 0.278 |
| 输出方式 | 3 | 14.673 | <0.001** | 0.018 | 3 | 17.621 | <0.001** | 0.104 | 3 | 2.211 | 0.086 | 0.014 |
| 环境负荷×输入方式 | 2 | 18.753 | <0.001** | 0.015 | 2 | 8.245 | <0.001** | 0.035 | 2 | 1.399 | 0.248 | 0.006 |
| 环境负荷×输出方式 | 3 | 10.494 | <0.001** | 0.013 | 3 | 1.529 | 0.206 | 0.010 | 3 | 0.357 | 0.784 | 0.002 |
| 输入方式×输出方式 | 6 | 7.723 | <0.001** | 0.019 | 6 | 8.685 | <0.001** | 0.103 | 6 | 0.215 | 0.972 | 0.003 |
| 环境负荷×输入方式×输出方式 | 6 | 11.285 | <0.001** | 0.027 | 6 | 3.801 | 0.001* | 0.048 | 6 | 1.878 | 0.083 | 0.024 |
Table 6 Results of intersubjective effects
| 自变量 | 反应时间 | 任务完成时间 | 操作错误数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| f | F | p | 偏η2 | f | F | p | 偏η2 | f | F | p | 偏η2 | |
| 环境负荷 | 1 | 92.656 | <0.001** | 0.037 | 1 | 120.032 | <0.001** | 0.208 | 1 | 5.963 | 0.015 | 0.013 |
| 输入方式 | 2 | 2227.280 | <0.001** | 0.649 | 2 | 533.338 | <0.001** | 0.701 | 2 | 87.917 | <0.001** | 0.278 |
| 输出方式 | 3 | 14.673 | <0.001** | 0.018 | 3 | 17.621 | <0.001** | 0.104 | 3 | 2.211 | 0.086 | 0.014 |
| 环境负荷×输入方式 | 2 | 18.753 | <0.001** | 0.015 | 2 | 8.245 | <0.001** | 0.035 | 2 | 1.399 | 0.248 | 0.006 |
| 环境负荷×输出方式 | 3 | 10.494 | <0.001** | 0.013 | 3 | 1.529 | 0.206 | 0.010 | 3 | 0.357 | 0.784 | 0.002 |
| 输入方式×输出方式 | 6 | 7.723 | <0.001** | 0.019 | 6 | 8.685 | <0.001** | 0.103 | 6 | 0.215 | 0.972 | 0.003 |
| 环境负荷×输入方式×输出方式 | 6 | 11.285 | <0.001** | 0.027 | 6 | 3.801 | 0.001* | 0.048 | 6 | 1.878 | 0.083 | 0.024 |

Fig.6 Reaction times under different input modes

Fig.7 Mission completion times under different input methods
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | -1.135 | 0.526 |
| 语音输入 | -51.184* | <0.001 | |
| 触屏输入 | 机械输入 | 1.135 | 0.526 |
| 语音输入 | -50.048* | <0.001 | |
| 语音输入 | 机械输入 | 51.184* | <0.001 |
| 触屏输入 | 50.048* | <0.001 |
Table 7 Multiple comparison of mission completion times of armored vehicle occupant under different input modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | -1.135 | 0.526 |
| 语音输入 | -51.184* | <0.001 | |
| 触屏输入 | 机械输入 | 1.135 | 0.526 |
| 语音输入 | -50.048* | <0.001 | |
| 语音输入 | 机械输入 | 51.184* | <0.001 |
| 触屏输入 | 50.048* | <0.001 |
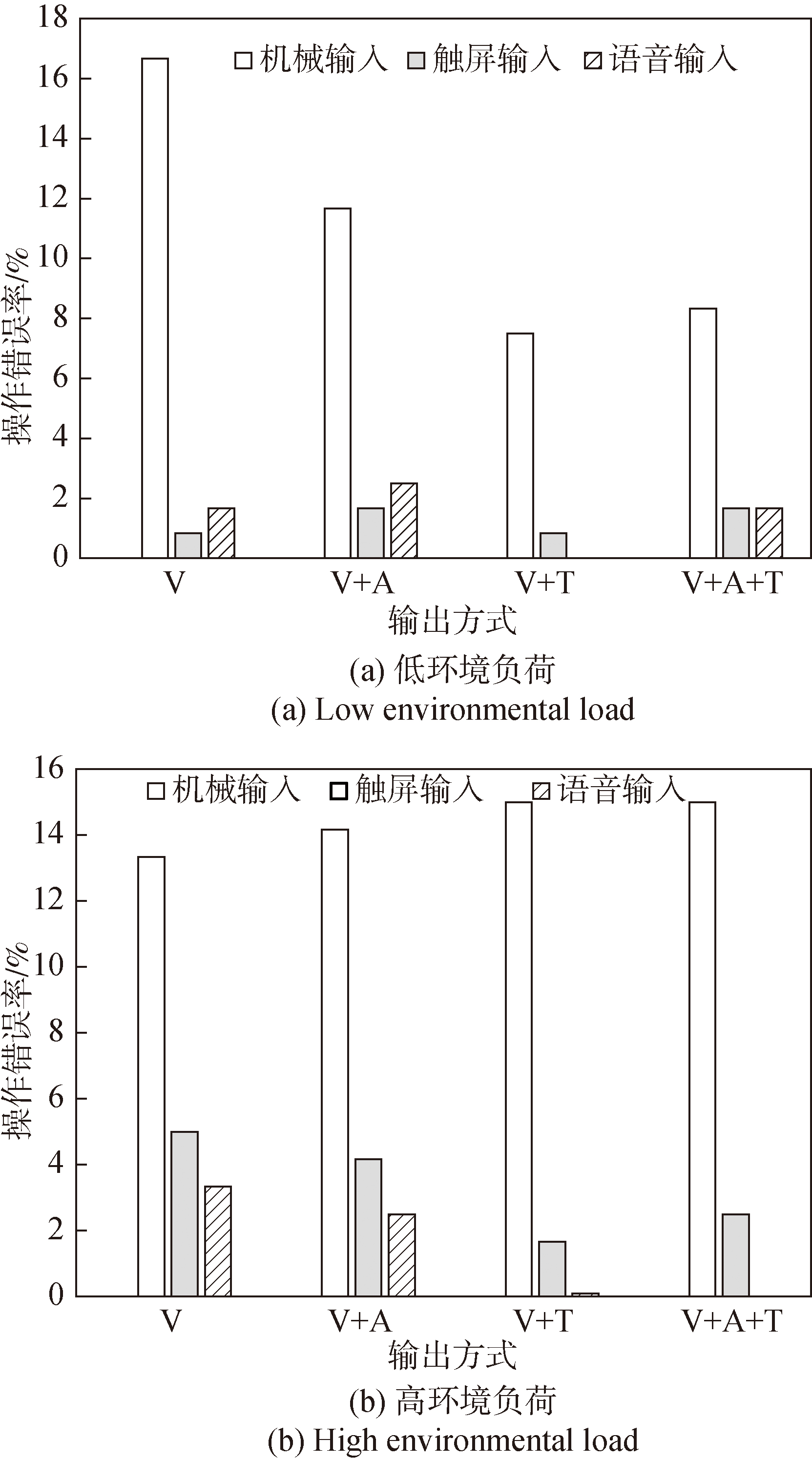
Fig.8 Operation error rates under different input modes
| 参考项 | 比较项 | 操作错误数平均值差值 | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | 0.62* | <0.001 |
| 语音输入 | 0.67* | <0.001 | |
| 触屏输入 | 机械输入 | -0.62* | <0.001 |
| 语音输入 | 0.04 | 0.439 | |
| 语音输入 | 机械输入 | -0.67* | <0.001 |
| 触屏输入 | -0.04 | 0.439 |
Table 8 Multiple comparison of the number of operating errors of armored vehicle occupant under different input modes
| 参考项 | 比较项 | 操作错误数平均值差值 | p |
|---|---|---|---|
| 机械输入 | 触屏输入 | 0.62* | <0.001 |
| 语音输入 | 0.67* | <0.001 | |
| 触屏输入 | 机械输入 | -0.62* | <0.001 |
| 语音输入 | 0.04 | 0.439 | |
| 语音输入 | 机械输入 | -0.67* | <0.001 |
| 触屏输入 | -0.04 | 0.439 |

Fig.9 Reaction times under different output modes
| 参考项 | 比较项 | 反应时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 0.116 | 0.062 |
| V+T | 0.409* | <0.001 | |
| V+A+T | 0.199** | 0.001 | |
| V+A | V | -0.116 | 0.062 |
| V+T | 0.293* | <0.001 | |
| V+A+T | 0.083 | 0.181 | |
| V+T | V | -0.409* | <0.001 |
| V+A | -0.293* | <0.001 | |
| V+A+T | -0.210** | 0.001 | |
| V+A+T | V | -0.199** | 0.001 |
| V+A | -0.083 | 0.181 | |
| V+T | 0.210** | 0.001 |
Table 9 Multiple comparison of reaction times of armored vehicle occupant under different output modes
| 参考项 | 比较项 | 反应时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 0.116 | 0.062 |
| V+T | 0.409* | <0.001 | |
| V+A+T | 0.199** | 0.001 | |
| V+A | V | -0.116 | 0.062 |
| V+T | 0.293* | <0.001 | |
| V+A+T | 0.083 | 0.181 | |
| V+T | V | -0.409* | <0.001 |
| V+A | -0.293* | <0.001 | |
| V+A+T | -0.210** | 0.001 | |
| V+A+T | V | -0.199** | 0.001 |
| V+A | -0.083 | 0.181 | |
| V+T | 0.210** | 0.001 |
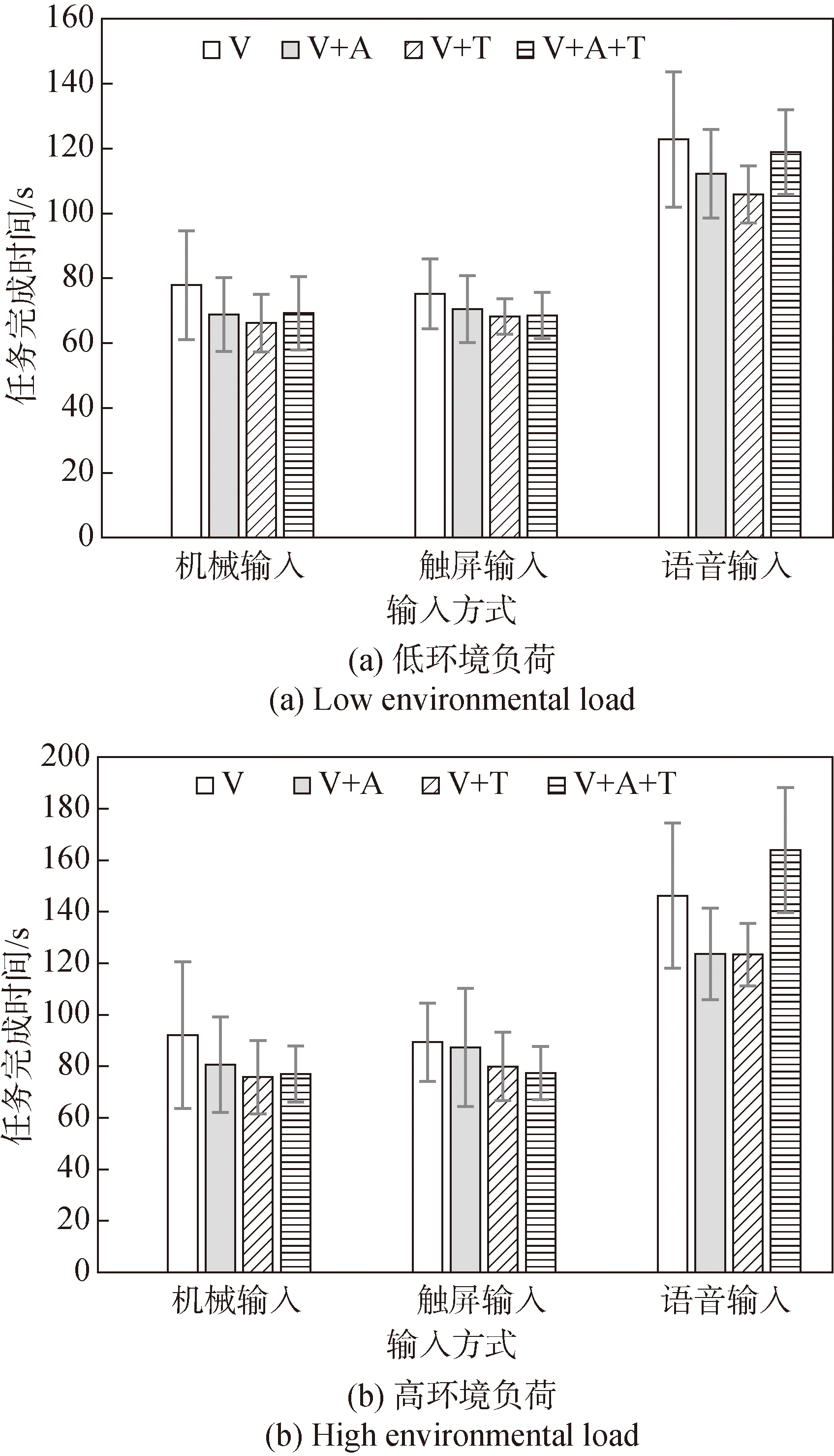
Fig.10 Mission completion times under different output modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 10.08* | 0.011 |
| V+T | 14.04** | <0.001 | |
| V+A+T | 4.75 | 0.230 | |
| V+A | V | -10.08* | 0.011 |
| V+T | 3.96 | 0.316 | |
| V+A+T | -5.33 | 0.178 | |
| V+T | V | -14.0 | <0.001 |
| V+A | -3.96 | 0.316 | |
| V+A+T | -9.29* | 0.019 | |
| V+A+T | V | -4.75 | 0.230 |
| V+A | 5.32 | 0.178 | |
| V+T | 9.29* | 0.019 |
Table 10 Multiple comparison of mission ompletion times of armored vehicle occupant under different output modes
| 参考项 | 比较项 | 任务完成时间平均值差值/s | p |
|---|---|---|---|
| V | V+A | 10.08* | 0.011 |
| V+T | 14.04** | <0.001 | |
| V+A+T | 4.75 | 0.230 | |
| V+A | V | -10.08* | 0.011 |
| V+T | 3.96 | 0.316 | |
| V+A+T | -5.33 | 0.178 | |
| V+T | V | -14.0 | <0.001 |
| V+A | -3.96 | 0.316 | |
| V+A+T | -9.29* | 0.019 | |
| V+A+T | V | -4.75 | 0.230 |
| V+A | 5.32 | 0.178 | |
| V+T | 9.29* | 0.019 |

Fig.11 Reaction times under different environmental loads
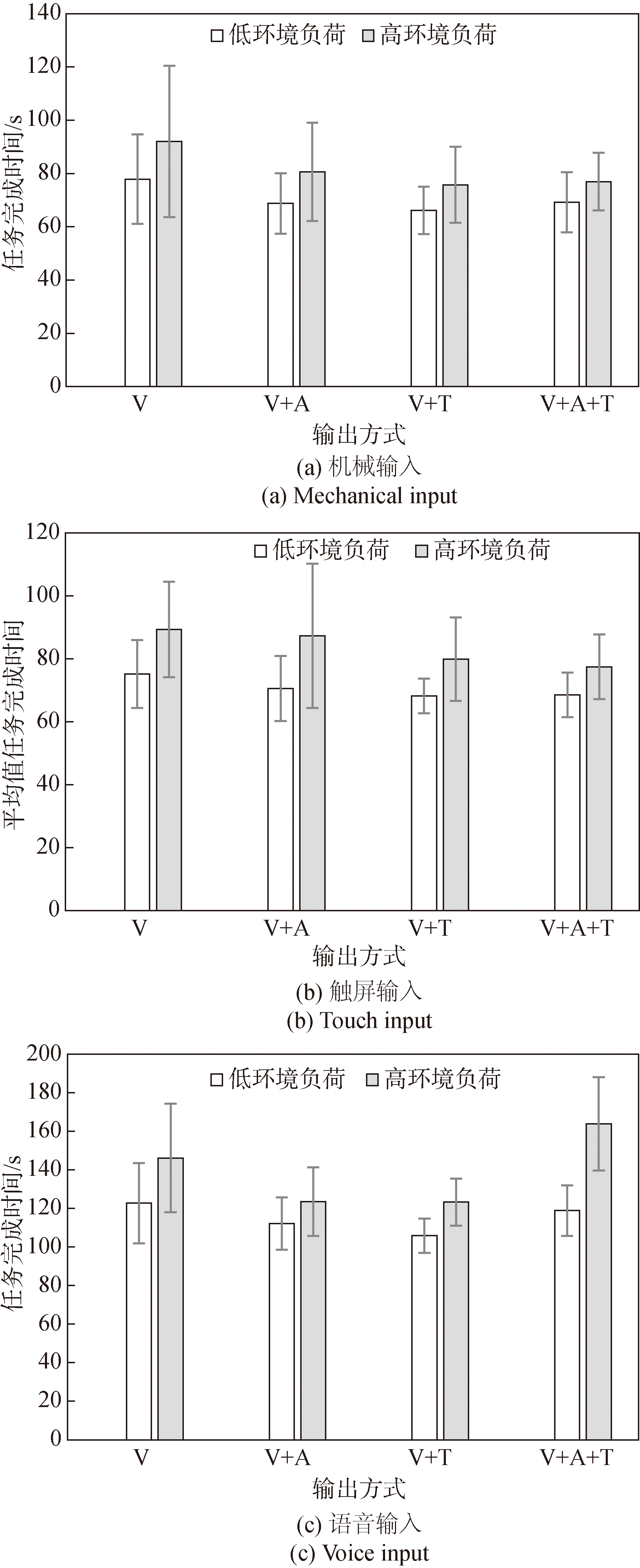
Fig.12 Mission completion times under different environmental loads
| 输入方式 | 输出方式 | 反应时间/s | 任务完成时间/s | ||
|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 机械输入 | V | 1.45 | 1.00 | 84.96 | 24.14 |
| V+A | 1.30 | 0.76 | 74.69 | 16.29 | |
| V+T | 1.10 | 0.71 | 70.95 | 12.70 | |
| V+A+T | 1.11 | 0.79 | 73.09 | 11.61 | |
| 触屏输入 | V | 2.19 | 1.15 | 82.27 | 14.83 |
| V+A | 2.15 | 1.06 | 78.92 | 19.50 | |
| V+T | 1.90 | 1.06 | 74.06 | 11.66 | |
| V+A+T | 1.82 | 1.04 | 72.98 | 9.83 | |
| 语音输入 | V | 4.85 | 1.41 | 134.50 | 27.23 |
| V+A | 4.48 | 1.19 | 117.90 | 16.67 | |
| V+T | 4.25 | 1.17 | 114.61 | 13.72 | |
| V+A+T | 4.91 | 1.55 | 141.41 | 29.82 | |
Table 11 Descriptive statistical results of reaction time and mission completion time under the interaction of input mode and output mode (mean±standard deviation)
| 输入方式 | 输出方式 | 反应时间/s | 任务完成时间/s | ||
|---|---|---|---|---|---|
| 平均值 | 标准差 | 平均值 | 标准差 | ||
| 机械输入 | V | 1.45 | 1.00 | 84.96 | 24.14 |
| V+A | 1.30 | 0.76 | 74.69 | 16.29 | |
| V+T | 1.10 | 0.71 | 70.95 | 12.70 | |
| V+A+T | 1.11 | 0.79 | 73.09 | 11.61 | |
| 触屏输入 | V | 2.19 | 1.15 | 82.27 | 14.83 |
| V+A | 2.15 | 1.06 | 78.92 | 19.50 | |
| V+T | 1.90 | 1.06 | 74.06 | 11.66 | |
| V+A+T | 1.82 | 1.04 | 72.98 | 9.83 | |
| 语音输入 | V | 4.85 | 1.41 | 134.50 | 27.23 |
| V+A | 4.48 | 1.19 | 117.90 | 16.67 | |
| V+T | 4.25 | 1.17 | 114.61 | 13.72 | |
| V+A+T | 4.91 | 1.55 | 141.41 | 29.82 | |
| [1] |
陈挚. 目标的识别与快速准确攻击一体化设计研究[D]. 南京: 南京航空航天大学, 2011.
|
|
|
|
| [2] |
曹灵芝, 殷复鹏. 人因工程在汽车产品中的应用调查与分析[C]// 中国人类工效学学会成立20周年庆祝大会论文集. 北京: 中国人类工效学学会,2009:409-413.
|
|
|
|
| [3] |
张文镝, 周诗婕, 金海亮, 等. 自动驾驶系统中人机协同的认知决策一体化机制研究[J]. 汽车文摘, 2023(9):11-18.
|
|
|
|
| [4] |
|
| [5] |
钱晓松, 杨新, 张帆. 面向特种车辆的触屏交互系统设计研究[J]. 装饰, 2018(3):82-85.
|
|
|
|
| [6] |
杨洋. 基于语音交互的手持移动端多通道交互研究[D]. 北京: 北京邮电大学, 2018.
|
|
|
|
| [7] |
范雪乔. 基于手势识别VR系统的交互体验评价研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
|
|
|
|
| [8] |
刘洋. 智能音箱语音交互设计中的可用性研究[D]. 北京: 中国矿业大学, 2022.
|
|
|
|
| [9] |
高岚岚, 纪坤, 乐剑. 眼动交互在点击任务中的应用研究[J]. 舰船电子工程, 2023, 43(5):63-63,81.
|
|
|
|
| [10] |
徐源. 眼控—手控双通道交互方式的工效学研究[D]. 杭州: 浙江理工大学, 2017.
|
|
|
|
| [11] |
孙晓东, 金晓萍, 解芳, 等. 多模态告警和认知负荷对装甲车辆乘员反应的影响[J]. 兵工学报, 2023, 44(4):972-981.
|
|
|
|
| [12] |
pmid: 23397817 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
张子健. 人机共驾模式下多模态刺激对驾驶员情景意识唤醒及接管评价研究[D]. 重庆: 重庆大学, 2019.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
李家文, 成波. 驾驶员疲劳状态适应式复合预警方法的研究[J]. 汽车工程, 2012(3):211-216.
|
|
|
|
| [20] |
陈慧娟. 飞机驾驶舱多通道人机交互设计研究[D]. 南京: 东南大学, 2016.
|
|
|
|
| [21] |
高莹. 基于环境心理学的老年人疗养中心设计方法的研究[D]. 西安: 长安大学, 2015.
|
|
|
|
| [22] |
石程. 基于环境—行为关系理论的老年公寓空间环境设计研究[D]. 兰州: 兰州理工大学, 2018.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
张永超. 高铁客站候车区热、光、声环境对人体舒适度的交互作用影响研究[D]. 北京: 北京交通大学, 2021.
|
|
|
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
国家质量监督检验检疫总局.声环境质量标准:GB 3096—2008 [S]. 北京: 中国环境科学出版社, 2008.
|
|
General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China.Environmental quality standard for noise:GB 3096—2008 [S]. Beijing: China Environmental Science Press, 2008. (in Chinese)
|
|
| [36] |
国家市场监督管理总局.视觉工效学原则.室内工作场所照明:GB/T 13379-2023[S]. 北京: 中国标准出版社, 2023.
|
|
State Administration for Market Regulation.Principles of visual ergonomics-the lighting of indoor work places:GB/T 13379—2023[S]. Beijing: China standard press, 2023. (in Chinese).
|
|
| [37] |
高祖新, 言方荣. 概率论与数理统计[M]. 第2版.: 南京:南京大学出版社, 2020. GAO Z X,YAN F R.Probability and statistics[M]. 2 ed. Nanjing: Nanjing University Press,2020. (in Chinese)
|
| [38] |
黄捷. 人机交互在震动环境下的仿真模型设计与实验测试[C]// 第四届和谐人机环境联合学术会议论文集. 昆明: 中国计算机学会,2008:1-7.
|
|
|
|
| [39] |
毛信良, 周田伟, 陈二喜. 一种用于多点触摸终端的触摸控制方法与设备:CN104076986B[P].2015-12-09.
|
|
|
| [1] | DU Fu, DONG Mingming, WANG Hujiang, ZHAO Yanhui, ZHENG Fengjie. Semi-active Inertial Suspension Control Strategy for Tanks and Armored Vehicles Based on Quasi-zero Stiffness [J]. Acta Armamentarii, 2024, 45(9): 2929-2935. |
| [2] | YUE Wenbin, NING Gongtao, NI Yongliang, SONG Keling, HUANG Yu, WANG Zhiyuan, LI Yanming. Collaborative Optimization and Security Control of Source-grid-load-storage of Tank and Armored Vehicle Power System: Architecture Design and Frontier Thinking [J]. Acta Armamentarii, 2024, 45(8): 2463-2477. |
| [3] | CHANG Tianqing, ZHANG Jie, ZHAO Liyang, HAN Bin, ZHANG Lei. Research on Armored Vehicle Detection Algorithm Based on Visible and Infrared Image Fusion [J]. Acta Armamentarii, 2024, 45(7): 2085-2096. |
| [4] | CHEN Gang, WANG Guoxin, MING Zhenjun, CHEN Wang, SHANG Xiwen, YAN Yan. Armored Vehicle Cluster Trajectory Prediction Method Based on DBSCAN Clustering Algorithm and LSTM Network [J]. Acta Armamentarii, 2024, 45(12): 4295-4310. |
| [5] | LIU Yi, REN Jihuan, WU Xiang, BO Yuming. Newly Equipped Armored Vehicle Classification Based on Integrated Transfer Learning [J]. Acta Armamentarii, 2023, 44(8): 2319-2328. |
| [6] | LIU Tao, ZHANG Hongwei, SUN Xiaowang, WANG Xianhui, ZHANG Jincheng, HU Yang. Experimental and Simulation Study on Vehicle Manned Airdrop [J]. Acta Armamentarii, 2023, 44(8): 2283-2298. |
| [7] | SUN Xiaodong, JIN Xiaoping, XIE Fang, SUN Houjie, ZHENG Sijuan. Effects of Multimodal Warning and Cognitive Load on the Response of Armored Vehicle Occupants [J]. Acta Armamentarii, 2023, 44(4): 972-981. |
| [8] | WANG Guosheng, LEI Qiangshun, CAO Yu, ZHANG Weijie, LI Guibing. Current Status and Trends in Shock-absorbing and Anti-explosion Technologies for Military Vehicle SeatsResearch on Design Technology of Shock Absorbing and Anti-explosion for Military Vehicle Seats(Series I) [J]. Acta Armamentarii, 2022, 43(7): 1718-1732. |
| [9] | SUN Houjie, JIN Xiaoping, XIE Fang, SUN Xiaodong, ZHENG Sijuan. Effects of Long-term Working Memory and Attention Distribution on Situational Awareness of Armored Vehicle Occupants [J]. Acta Armamentarii, 2022, 43(11): 2749-2760. |
| [10] | GUO Sinan, WANYAN Xiaoru, LIU Shuang, LIANG Chaoran, CHEN Hao. Influences of Intelligent Design and Information Processing Modality Complexity on Occupant Mental Workload [J]. Acta Armamentarii, 2021, 42(2): 234-241. |
| [11] | SUN Xiaowang, ZHANG Jincheng, PENG Bing, ZHANG Jinkun, WANG Xianhui. Design and Optimization of Occupant Lower Limb Protection Device against Explosion Shock below Military Vehicle [J]. Acta Armamentarii, 2021, 42(12): 2555-2564. |
| [12] | WANG Guo-sheng, YAO Ling-yu, WEI Lai-sheng, PIAO Yan, GU Liang. Research on the Influence of Linear Vibration of a Tank Chassis on On-the-move Shooting Accuracy [J]. Acta Armamentarii, 2016, 37(3): 541-546. |
| [13] | LUO Qing-guo, YIN Hong-tao, NING Xing-xing. A Design Method of Cooling System Principle Scheme Based on Directed Graph [J]. Acta Armamentarii, 2016, 37(1): 10-16. |
| [14] | LIU Wei-ping, NIE Jun-feng, JIN Yi, BAI Ya-juan. Research on Evaluation Method of Armored Vehicle Crew's Mental Workload Based on Task-network Model [J]. Acta Armamentarii, 2015, 36(9): 1805-1810. |
| [15] | DING Kai,QIAN Han-ming,CHEN Guo,RONG Ying-jiao,ZHU Yi-chao,SHI Jun-chao. Noise Reduction of Acoustic Signals from Armored Vehicles Based on CDBI-LPM [J]. Acta Armamentarii, 2015, 36(7): 1181-1187. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||