
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (12): 4295-4310.doi: 10.12382/bgxb.2023.1064
Previous Articles Next Articles
CHEN Gang1, WANG Guoxin1, MING Zhenjun1,*( ), CHEN Wang2, SHANG Xiwen2, YAN Yan1
), CHEN Wang2, SHANG Xiwen2, YAN Yan1
Received:2023-10-31
Online:2024-01-30
Contact:
MING Zhenjun
CLC Number:
CHEN Gang, WANG Guoxin, MING Zhenjun, CHEN Wang, SHANG Xiwen, YAN Yan. Armored Vehicle Cluster Trajectory Prediction Method Based on DBSCAN Clustering Algorithm and LSTM Network[J]. Acta Armamentarii, 2024, 45(12): 4295-4310.
Add to citation manager EndNote|Ris|BibTeX
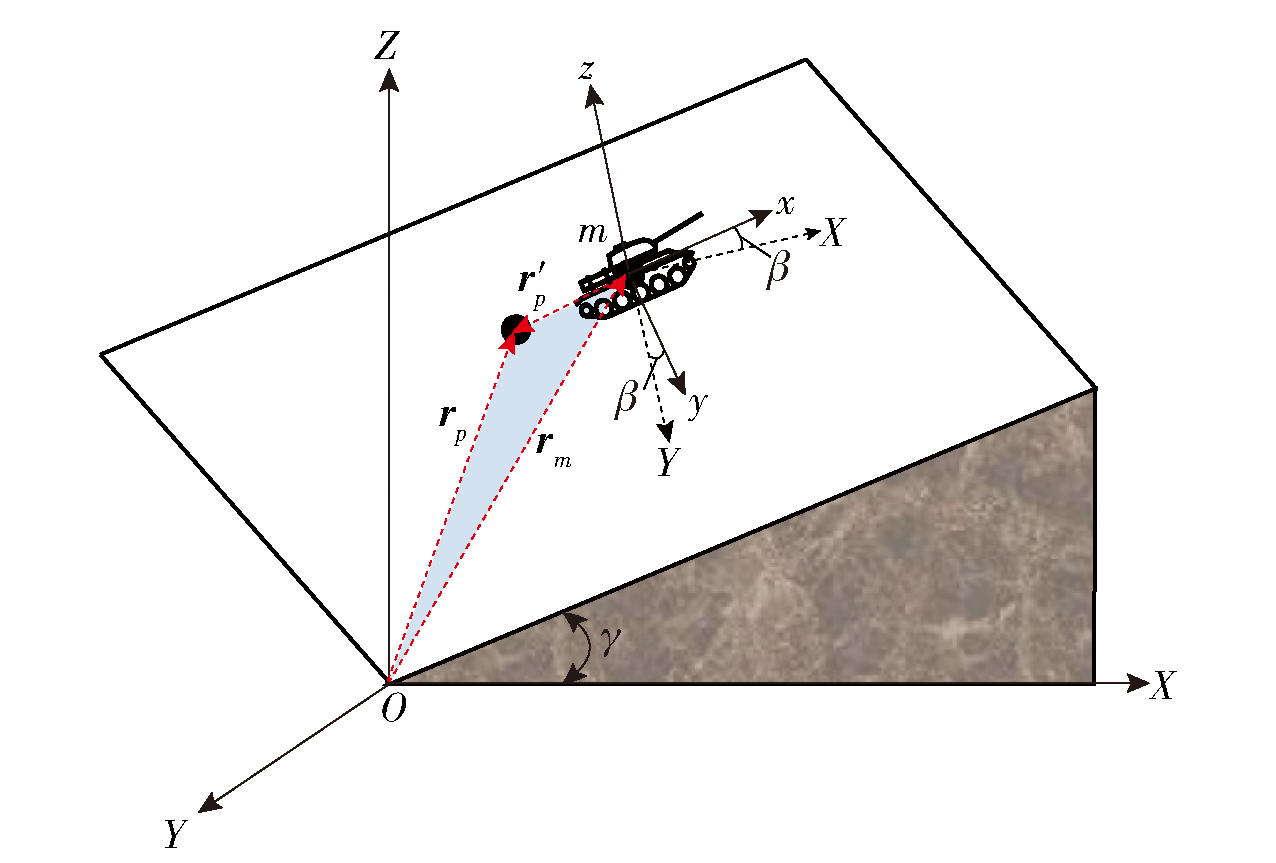
Fig.1 Definition of coordinate system
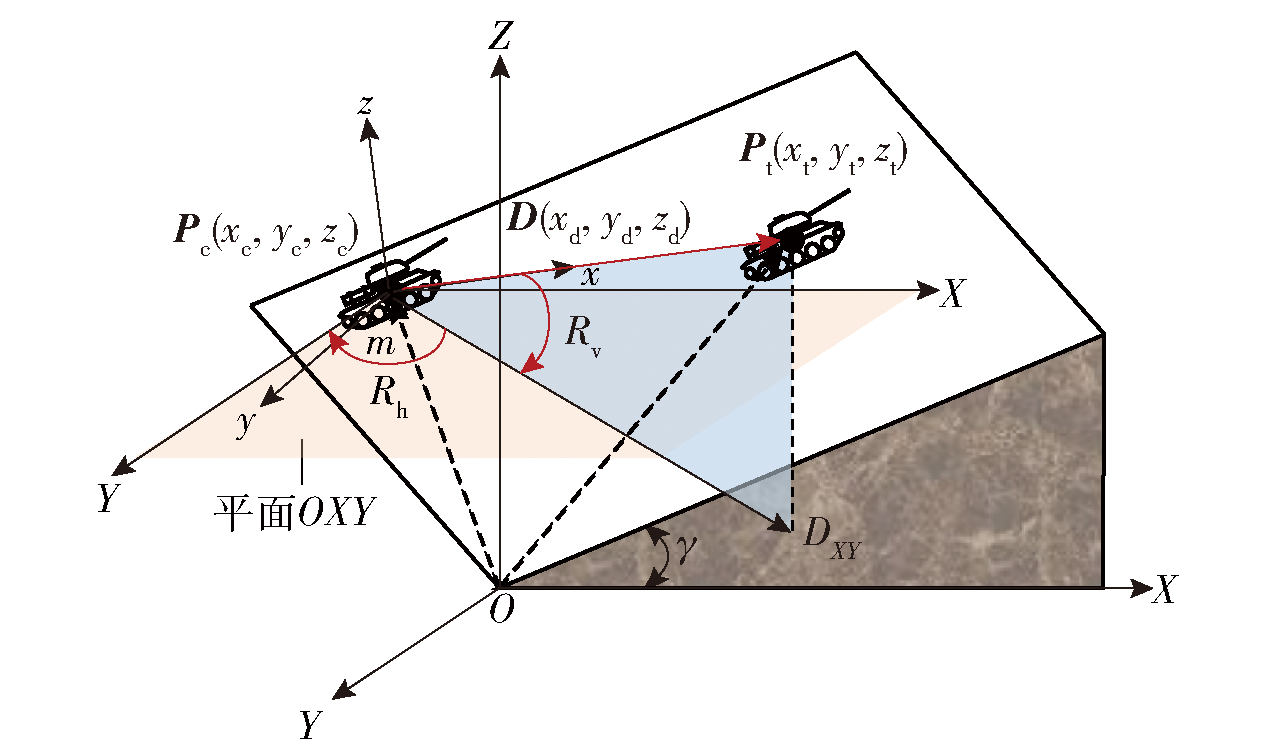
Fig.2 Armored vehicle driving on a slope
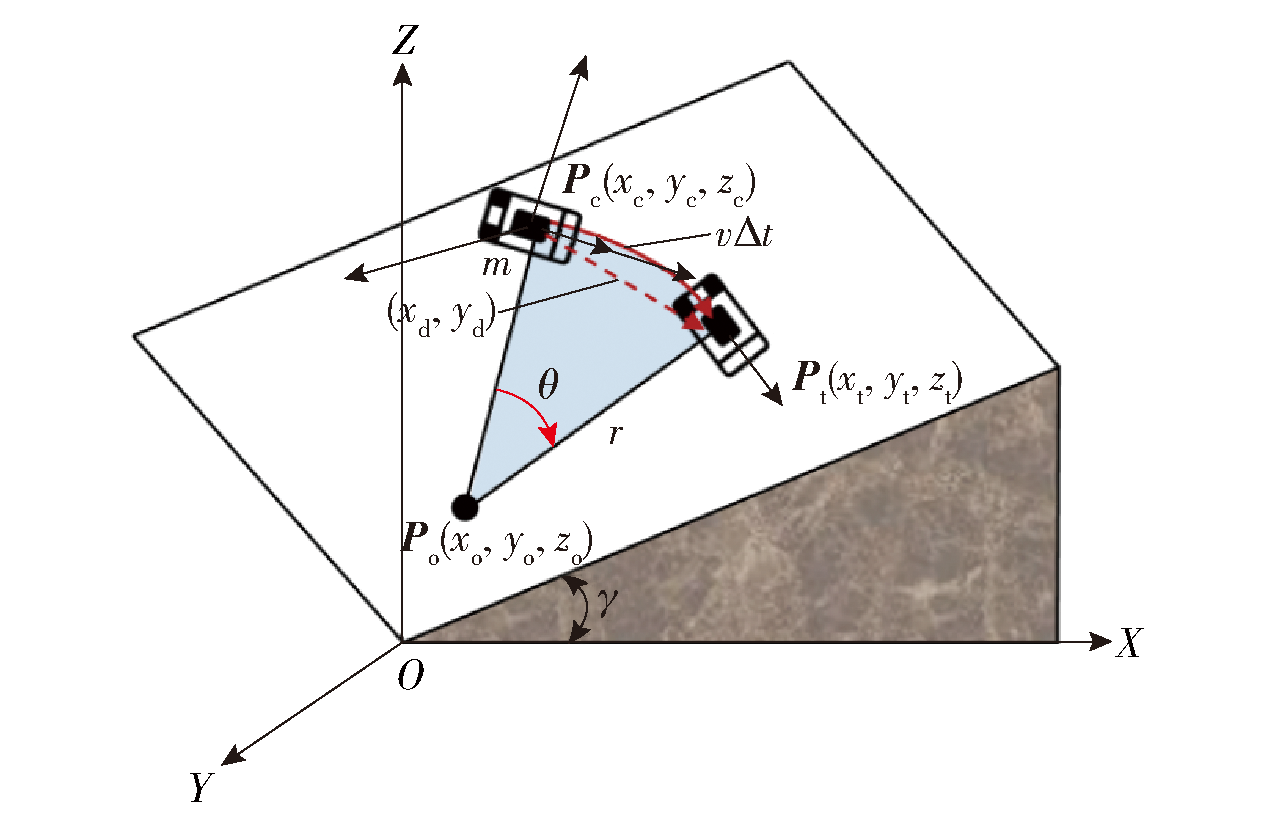
Fig.3 Armored vehicle turning on a slope

Fig.4 Vehicle-to-vehicle interaction state
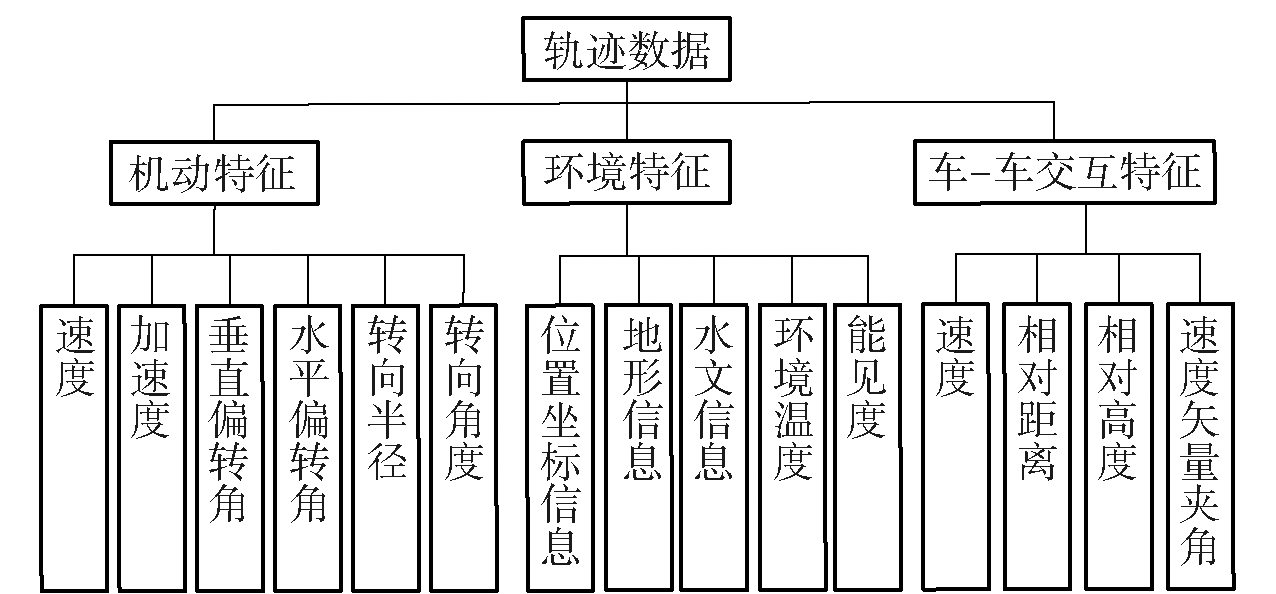
Fig.5 Feature information of armored vehicle trajectory data
| 特征类型 | 类型特征取值 | 编码 |
|---|---|---|
| 平地 | 100 | |
| 地形信息 | 丘陵 | 010 |
| 高山 | 001 | |
| 湖泊 | 100 | |
| 水文信息 | 沼泽 | 010 |
| 江河 | 001 |
Table 1 Feature information coding
| 特征类型 | 类型特征取值 | 编码 |
|---|---|---|
| 平地 | 100 | |
| 地形信息 | 丘陵 | 010 |
| 高山 | 001 | |
| 湖泊 | 100 | |
| 水文信息 | 沼泽 | 010 |
| 江河 | 001 |
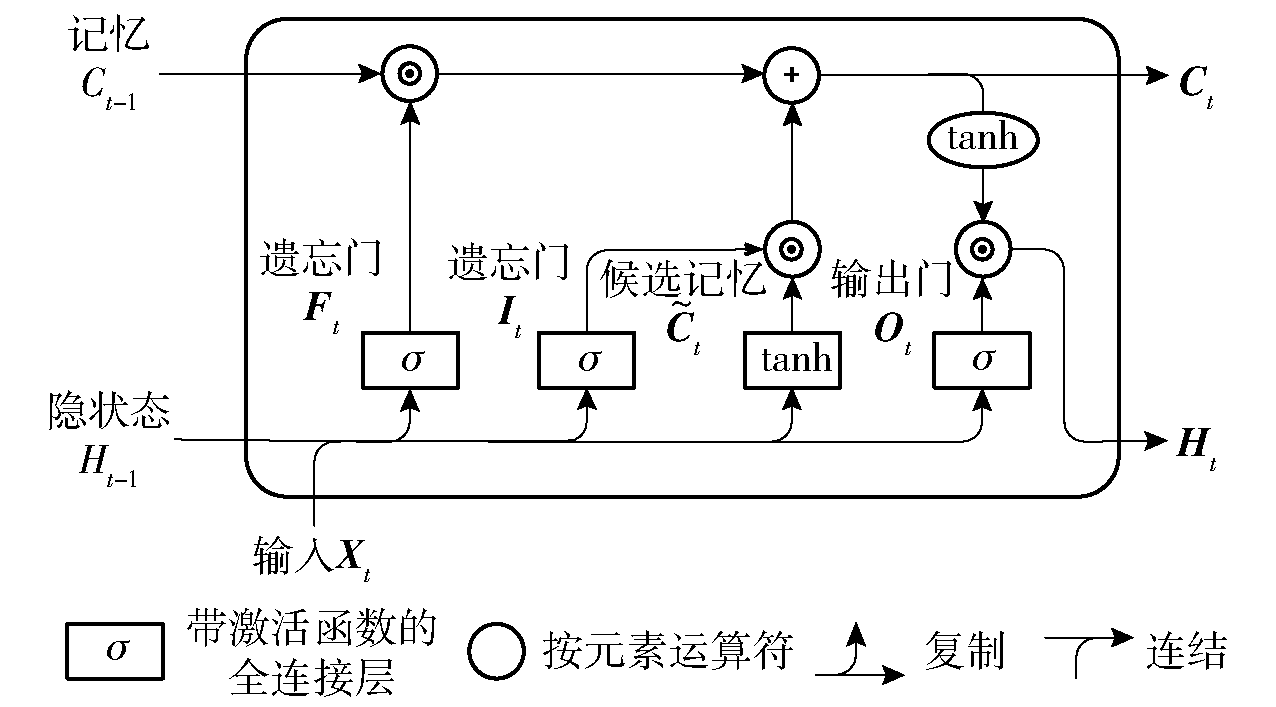
Fig.6 LSTM network unit structure
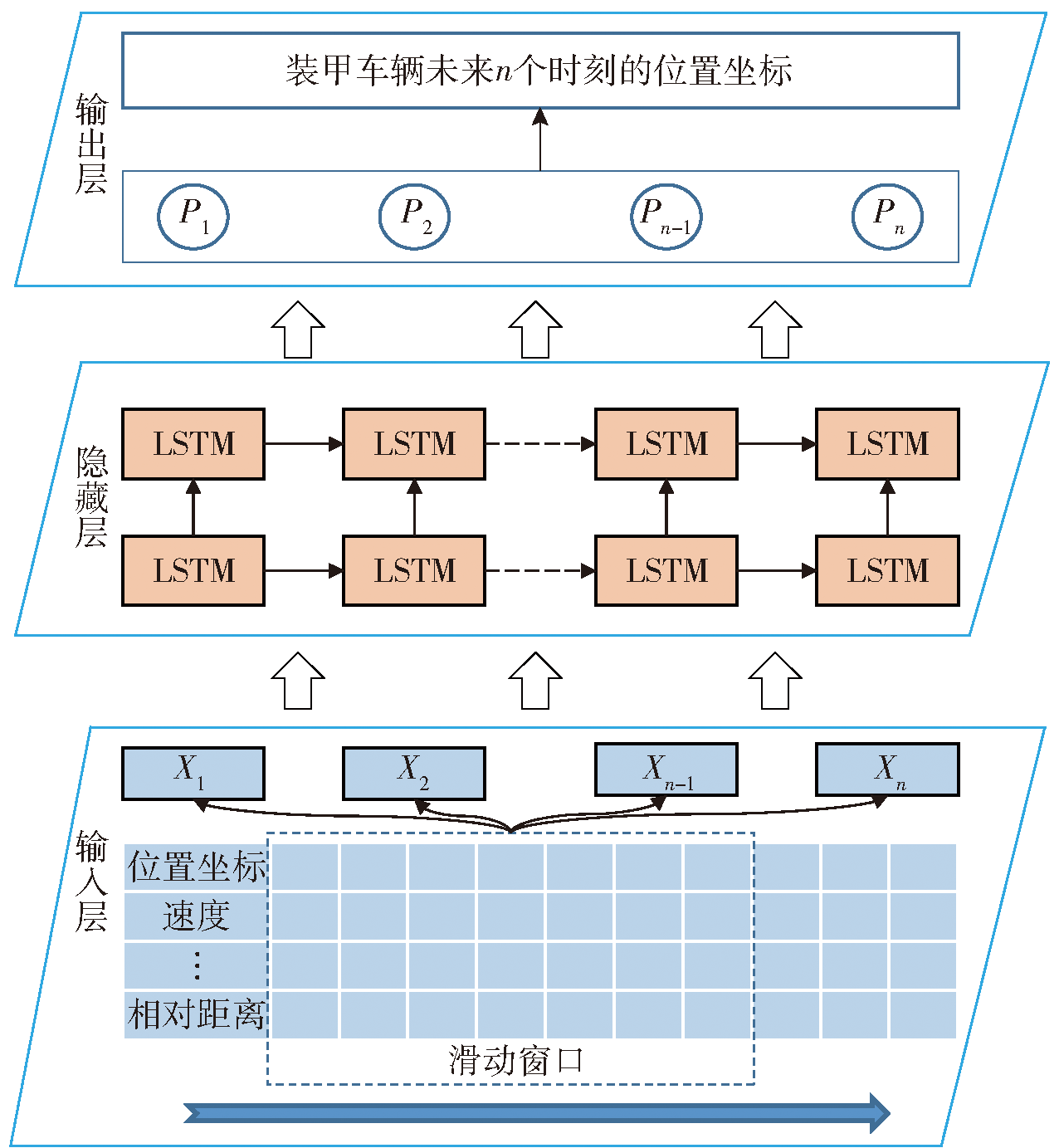
Fig.7 Single armored vehicle trajectory prediction model
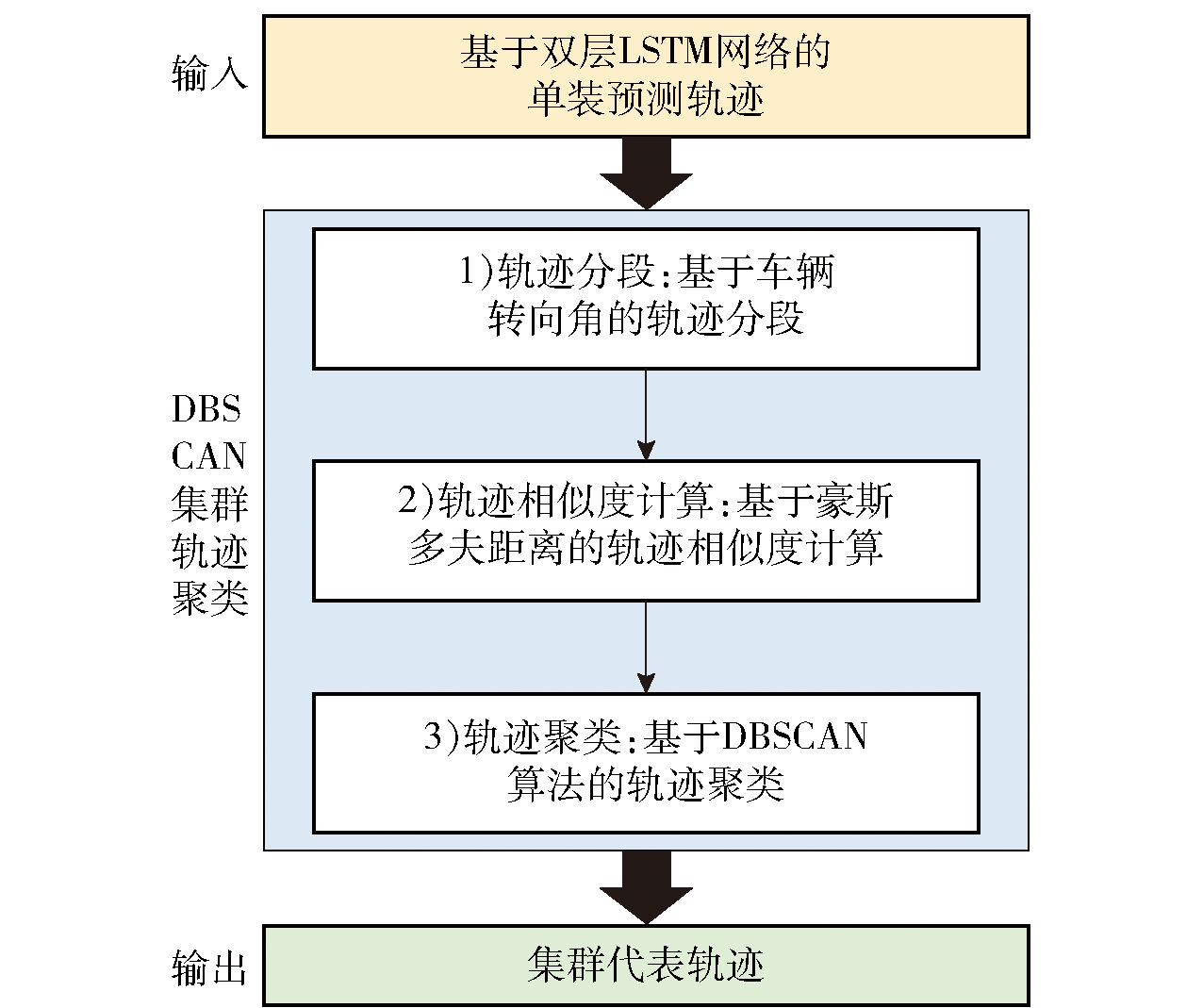
Fig.8 Flowchart of armored vehicle cluster trajectory clustering method

Fig.9 Vehicle steering angle
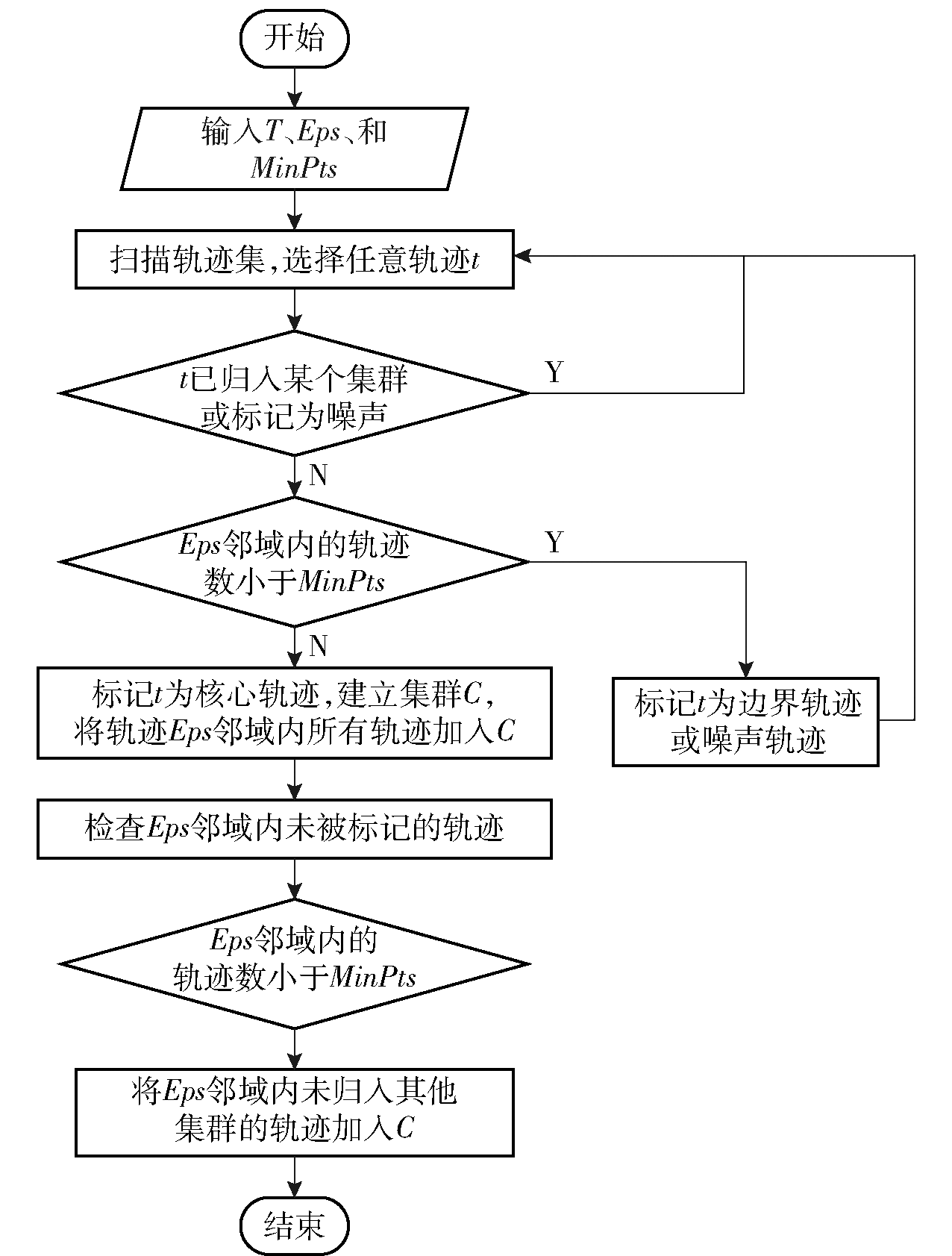
Fig.10 Flowchart of DBSCAN-based trajectory clustering algorithm
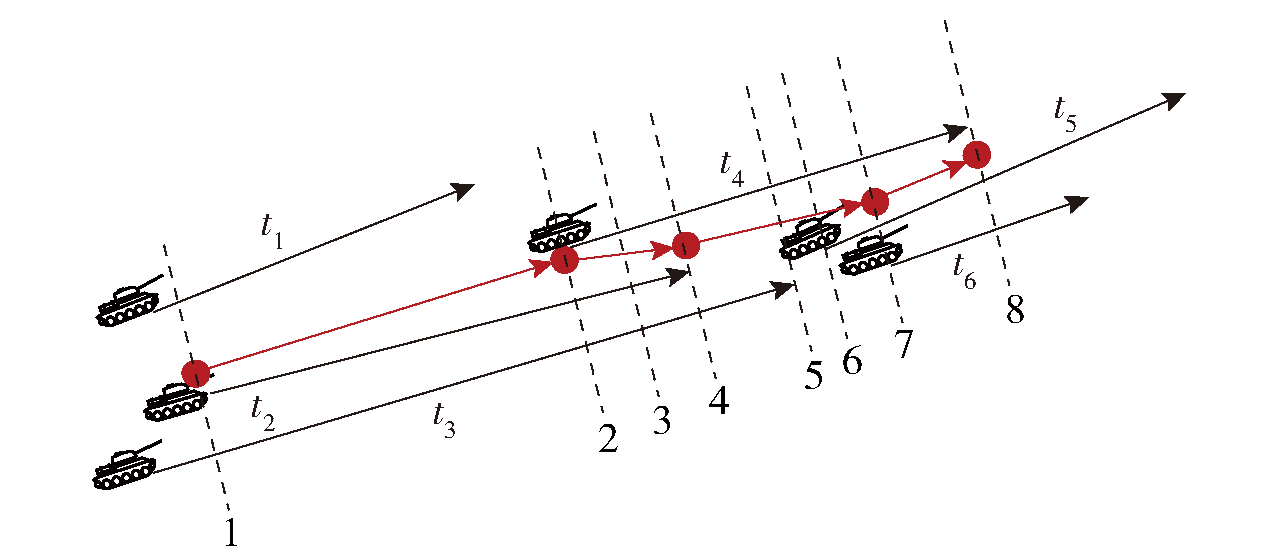
Fig.11 Schematic diagram of armored vehicle cluster representative trajectory
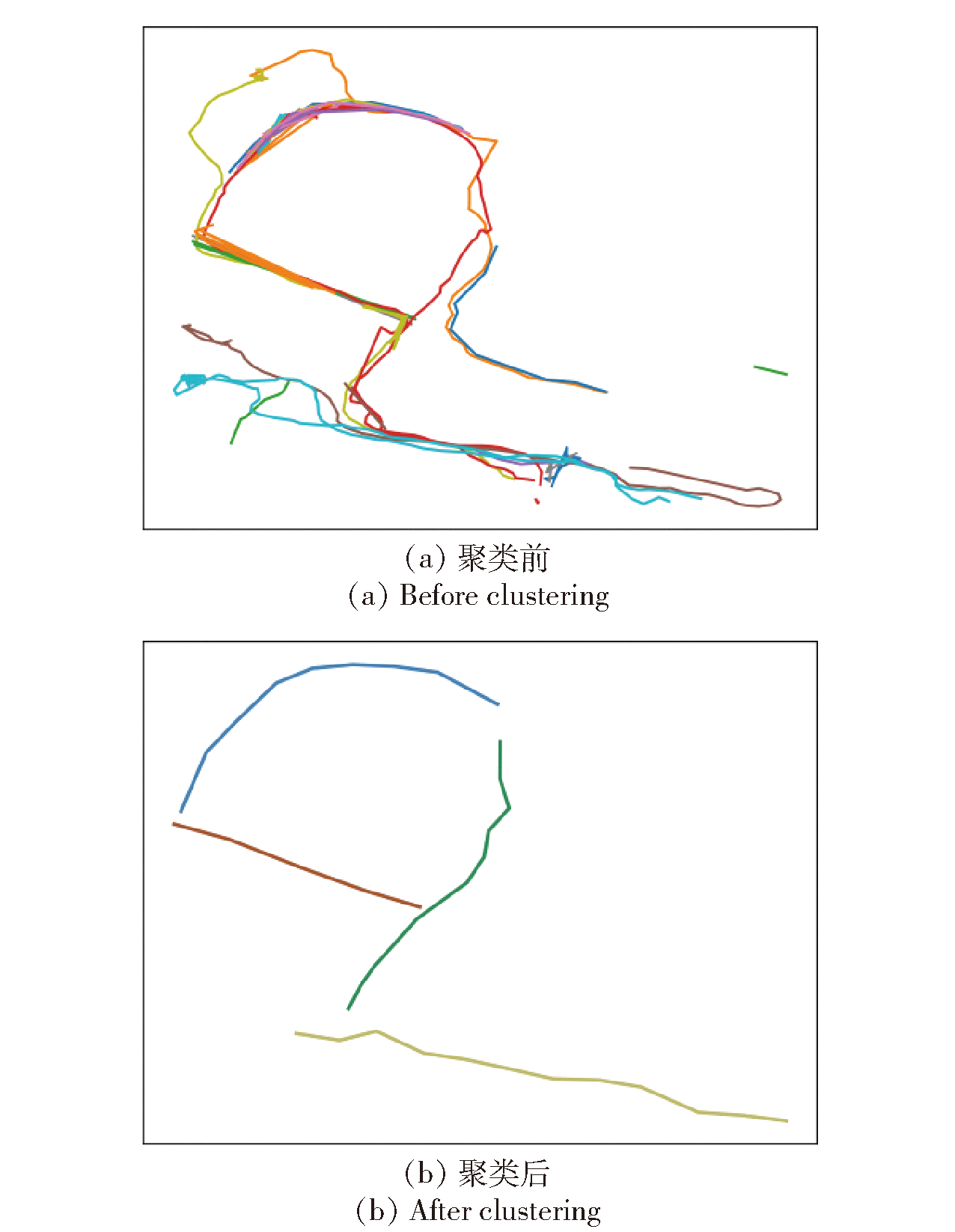
Fig.12 Example of trajectory clustering
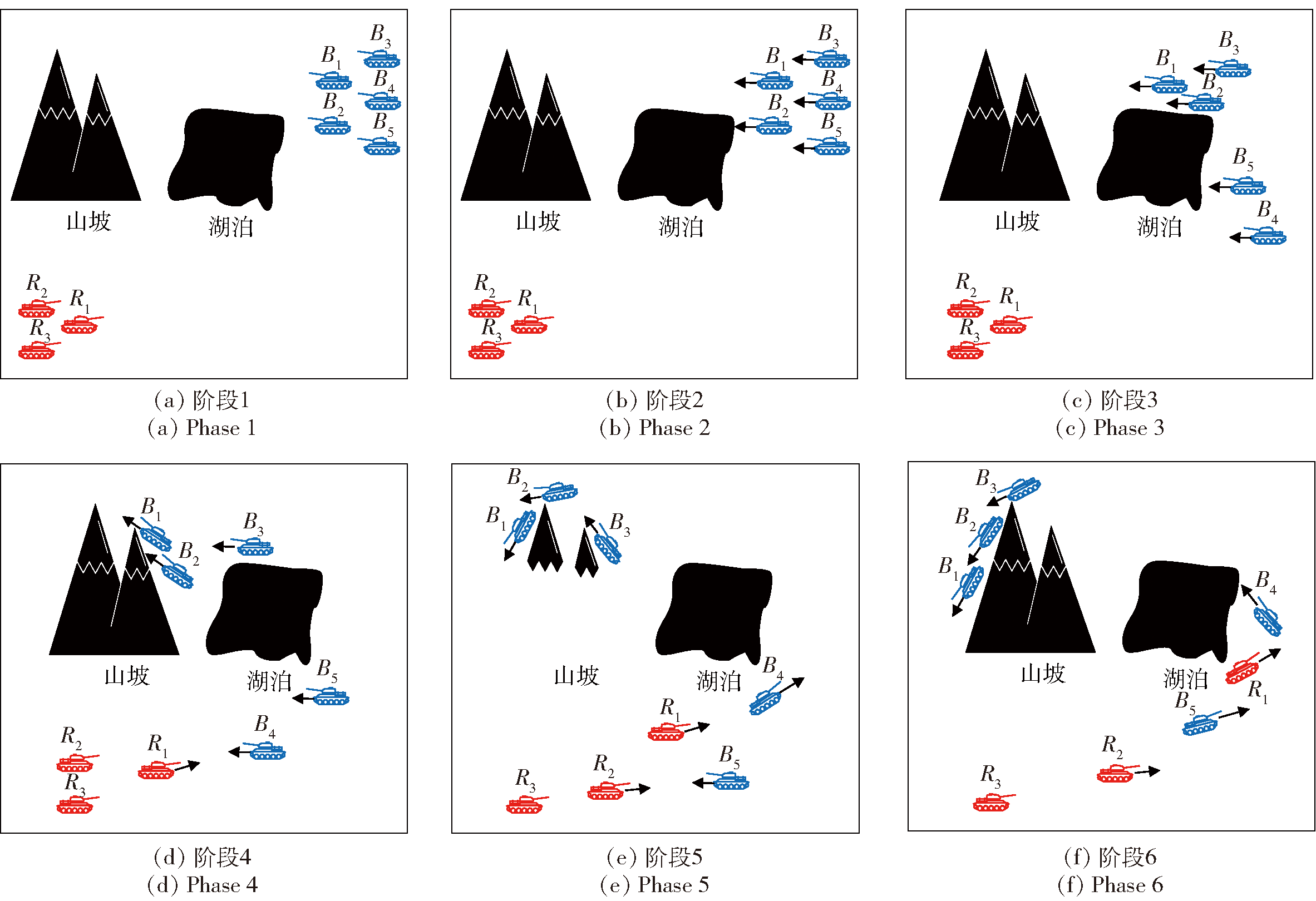
Fig.13 Movement of armored vehicle group in a red-blue confrontation process
| 样本 点 | 速度/ (km·h-1) | 加速度/ (km·h-2) | 垂直 偏转 角/ (°) | 水平 偏转 角/ (°) | 转向 半径/ km | 转向 角度/ (°) | 经度/ (°) | 纬度/ (°) | 高度/ m | 地形 信息 | 水文 信息 | 气温/ ℃ | 能见 度 | 相对 距离/ km | 相对 高度/ m | 速度 矢量 夹角/ (°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0 | 0 | -43.4 | 0 | 0 | 121.28 | 25.03 | 85.58 | 100 | 000 | 25.2 | 2 | 0 | 0 | 0 |
| 2 | 20 | 0 | 0 | -43.3 | 0 | 0 | 121.28 | 25.03 | 85. 89 | 100 | 000 | 25.3 | 2 | 0 | 0 | 0 |
| 3 | 20 | 0 | 0 | -43.8 | 0 | 0 | 121.28 | 25.03 | 85.07 | 100 | 000 | 25.1 | 2 | 0 | 0 | 0 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 1399 | 36 | 0.4 | 15.6 | 23.4 | 20 | 12.2 | 121.31 | 25.06 | 116.01 | 100 | 100 | 25.5 | 2 | 4.3 | 20.8 | 38.2 |
| 1400 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.44 | 100 | 100 | 24.8 | 1 | 4.5 | 21.5 | 37.4 |
| 1401 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.51 | 100 | 100 | 24.8 | 1 | 4.5 | 21.9 | 37.4 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 2798 | 40 | 0.5 | 10.4 | 24.8 | 20 | -8.6 | 121.33 | 25.09 | 127.03 | 001 | 000 | 24.9 | 1 | 5.9 | 45.6 | 15.2 |
| 2799 | 40 | 0.5 | 10.6 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.15 | 001 | 000 | 24.2 | 2 | 6.2 | 45.9 | 16.8 |
| 2800 | 40 | 0.5 | 10.8 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.27 | 001 | 000 | 24.2 | 2 | 6.4 | 46.8 | 16.5 |
Table 2 Simulation experimental data
| 样本 点 | 速度/ (km·h-1) | 加速度/ (km·h-2) | 垂直 偏转 角/ (°) | 水平 偏转 角/ (°) | 转向 半径/ km | 转向 角度/ (°) | 经度/ (°) | 纬度/ (°) | 高度/ m | 地形 信息 | 水文 信息 | 气温/ ℃ | 能见 度 | 相对 距离/ km | 相对 高度/ m | 速度 矢量 夹角/ (°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0 | 0 | -43.4 | 0 | 0 | 121.28 | 25.03 | 85.58 | 100 | 000 | 25.2 | 2 | 0 | 0 | 0 |
| 2 | 20 | 0 | 0 | -43.3 | 0 | 0 | 121.28 | 25.03 | 85. 89 | 100 | 000 | 25.3 | 2 | 0 | 0 | 0 |
| 3 | 20 | 0 | 0 | -43.8 | 0 | 0 | 121.28 | 25.03 | 85.07 | 100 | 000 | 25.1 | 2 | 0 | 0 | 0 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 1399 | 36 | 0.4 | 15.6 | 23.4 | 20 | 12.2 | 121.31 | 25.06 | 116.01 | 100 | 100 | 25.5 | 2 | 4.3 | 20.8 | 38.2 |
| 1400 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.44 | 100 | 100 | 24.8 | 1 | 4.5 | 21.5 | 37.4 |
| 1401 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.51 | 100 | 100 | 24.8 | 1 | 4.5 | 21.9 | 37.4 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 2798 | 40 | 0.5 | 10.4 | 24.8 | 20 | -8.6 | 121.33 | 25.09 | 127.03 | 001 | 000 | 24.9 | 1 | 5.9 | 45.6 | 15.2 |
| 2799 | 40 | 0.5 | 10.6 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.15 | 001 | 000 | 24.2 | 2 | 6.2 | 45.9 | 16.8 |
| 2800 | 40 | 0.5 | 10.8 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.27 | 001 | 000 | 24.2 | 2 | 6.4 | 46.8 | 16.5 |
| 数据集 | 轨迹 数量 | 位置点 数量 | 子轨迹 数量 | 输入向量 维度 | 输出向量 维度 |
|---|---|---|---|---|---|
| 训练集 | 240 | 2000 | 474240 | 20×20 | 5×3 |
| 验证集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 测试集 | 240 | 400 | 90240 | 20×20 | 5×3 |
Table 3 Characteristics of the dataset
| 数据集 | 轨迹 数量 | 位置点 数量 | 子轨迹 数量 | 输入向量 维度 | 输出向量 维度 |
|---|---|---|---|---|---|
| 训练集 | 240 | 2000 | 474240 | 20×20 | 5×3 |
| 验证集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 测试集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 参数 | 数值 |
|---|---|
| 输入维度 | (Batch, 20, 20) |
| 输出维度 | (Batch, 5, 3) |
| Batch | 64 |
| LSTM层数 | 2 |
| 嵌入层维度 | 64 |
| 隐藏层维度 | 128 |
| 初始学习率 | 0.01 |
| 训练周期 | 500 |
| Dropout率 | 0.2 |
| 梯度裁剪范围 | (-5, 5) |
| 优化器 | Adam |
| 激活函数 | ReLU |
Table 4 Model parameters
| 参数 | 数值 |
|---|---|
| 输入维度 | (Batch, 20, 20) |
| 输出维度 | (Batch, 5, 3) |
| Batch | 64 |
| LSTM层数 | 2 |
| 嵌入层维度 | 64 |
| 隐藏层维度 | 128 |
| 初始学习率 | 0.01 |
| 训练周期 | 500 |
| Dropout率 | 0.2 |
| 梯度裁剪范围 | (-5, 5) |
| 优化器 | Adam |
| 激活函数 | ReLU |
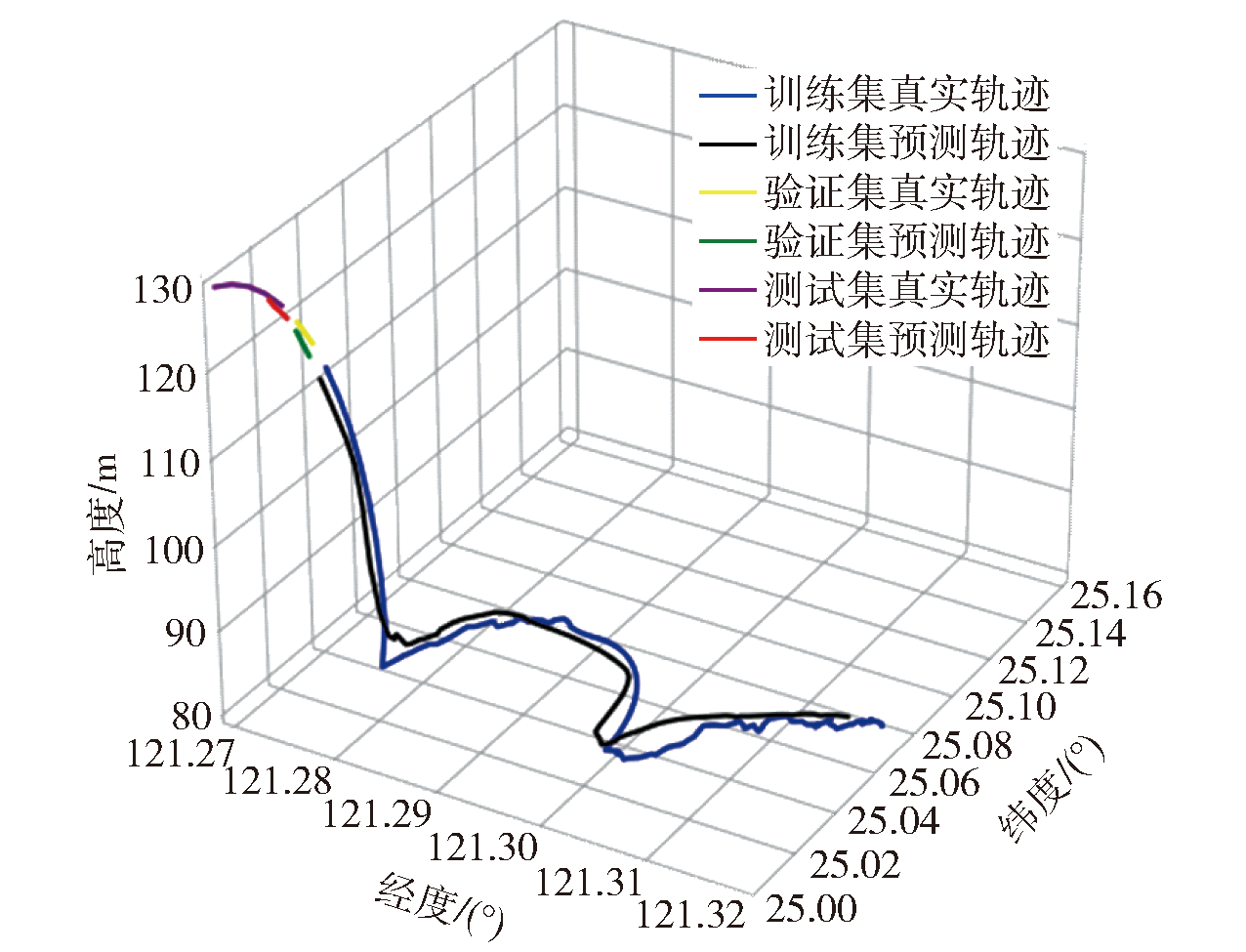
Fig.14 3D trajectory predicted result of armored vehicle B1
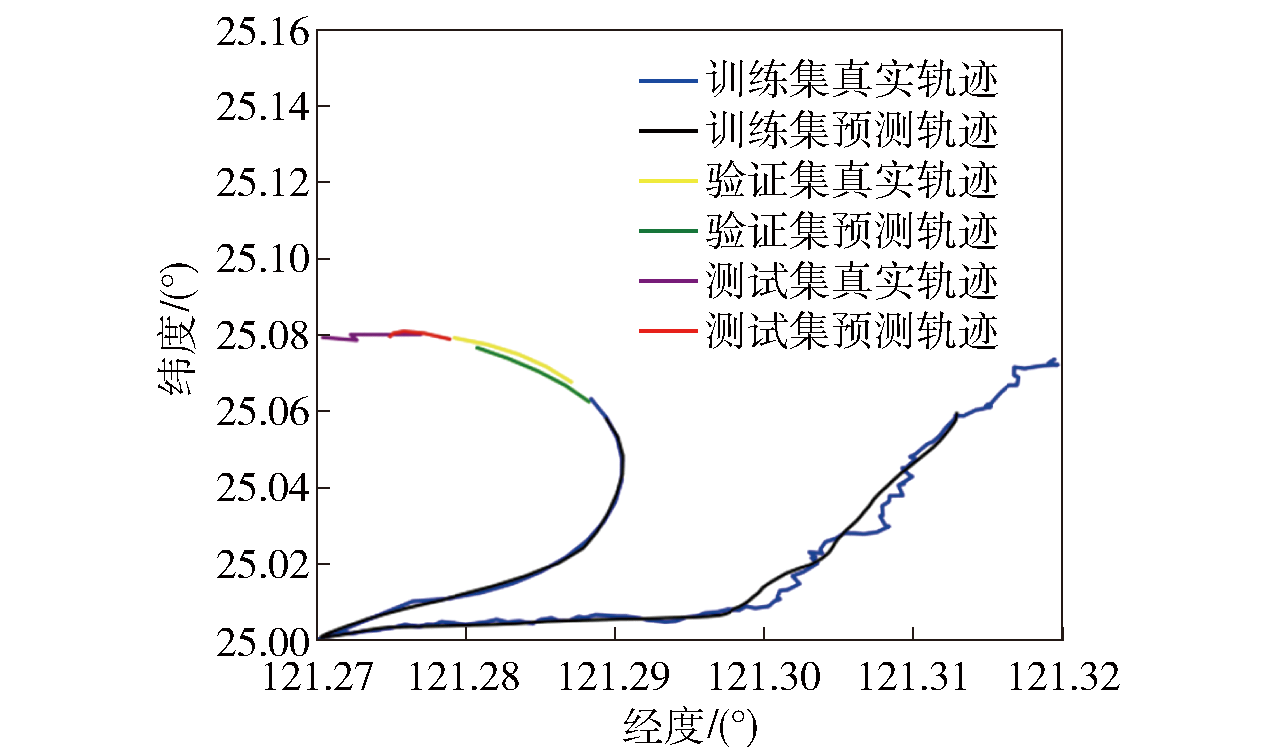
Fig.15 2D trajectory predicted result of armored vehicle B4
| 仿真 次数 | 指标 | BP神经 网络 | RNN | 单层 LSTM | 双层 LSTM |
|---|---|---|---|---|---|
| MAE | 25.28 | 8.83 | 3.19 | 1.65 | |
| 1 | RMSE | 4.86 | 3.25 | 1.87 | 0.91 |
| TIME | 0.028 | 0.072 | 0.121 | 0.183 | |
| MAE | 26.53 | 8.07 | 3.34 | 1.61 | |
| 2 | RMSE | 5.23 | 2.98 | 1.72 | 0.85 |
| TIME | 0.023 | 0.063 | 0.112 | 0.174 | |
| MAE | 26.44 | 8.45 | 3.23 | 1.54 | |
| 3 | RMSE | 5.12 | 3.01 | 1.75 | 0.77 |
| TIME | 0.025 | 0.067 | 0.117 | 0.181 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 26.04 | 8.28 | 3.21 | 1.60 | |
| 14 | RMSE | 5.29 | 3.11 | 1.83 | 0.85 |
| TIME | 0.020 | 0.061 | 0.107 | 0.173 | |
| MAE | 24.67 | 7.91 | 3.08 | 1.53 | |
| 15 | RMSE | 4.79 | 3.12 | 1.85 | 0.81 |
| TIME | 0.027 | 0.067 | 0.118 | 0.183 | |
| MAE | 27.26 | 8.12 | 3.12 | 1.57 | |
| 16 | RMSE | 5.14 | 3.08 | 1.90 | 0.79 |
| TIME | 0.028 | 0.069 | 0.120 | 0.185 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 25.73 | 8.25 | 3.23 | 1.56 | |
| 28 | RMSE | 5.11 | 3.13 | 1.79 | 0.87 |
| TIME | 0.019 | 0.059 | 0.109 | 0.169 | |
| MAE | 25.34 | 7.75 | 3.36 | 1.66 | |
| 29 | RMSE | 5.32 | 2.87 | 1.77 | 0.86 |
| TIME | 0.021 | 0.063 | 0.115 | 0.175 | |
| MAE | 27.07 | 8.70 | 3.31 | 1.55 | |
| 30 | RMSE | 5.07 | 3.09 | 1.70 | 0.84 |
| TIME | 0.023 | 0.071 | 0.121 | 0.172 | |
| MAE | 25.69 | 8.31 | 3.26 | 1.58 | |
| 平均 | RMSE | 5.07 | 3.06 | 1.81 | 0.83 |
| TIME | 0.024 | 0.065 | 0.114 | 0.178 |
Table 5 Model comparison results
| 仿真 次数 | 指标 | BP神经 网络 | RNN | 单层 LSTM | 双层 LSTM |
|---|---|---|---|---|---|
| MAE | 25.28 | 8.83 | 3.19 | 1.65 | |
| 1 | RMSE | 4.86 | 3.25 | 1.87 | 0.91 |
| TIME | 0.028 | 0.072 | 0.121 | 0.183 | |
| MAE | 26.53 | 8.07 | 3.34 | 1.61 | |
| 2 | RMSE | 5.23 | 2.98 | 1.72 | 0.85 |
| TIME | 0.023 | 0.063 | 0.112 | 0.174 | |
| MAE | 26.44 | 8.45 | 3.23 | 1.54 | |
| 3 | RMSE | 5.12 | 3.01 | 1.75 | 0.77 |
| TIME | 0.025 | 0.067 | 0.117 | 0.181 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 26.04 | 8.28 | 3.21 | 1.60 | |
| 14 | RMSE | 5.29 | 3.11 | 1.83 | 0.85 |
| TIME | 0.020 | 0.061 | 0.107 | 0.173 | |
| MAE | 24.67 | 7.91 | 3.08 | 1.53 | |
| 15 | RMSE | 4.79 | 3.12 | 1.85 | 0.81 |
| TIME | 0.027 | 0.067 | 0.118 | 0.183 | |
| MAE | 27.26 | 8.12 | 3.12 | 1.57 | |
| 16 | RMSE | 5.14 | 3.08 | 1.90 | 0.79 |
| TIME | 0.028 | 0.069 | 0.120 | 0.185 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 25.73 | 8.25 | 3.23 | 1.56 | |
| 28 | RMSE | 5.11 | 3.13 | 1.79 | 0.87 |
| TIME | 0.019 | 0.059 | 0.109 | 0.169 | |
| MAE | 25.34 | 7.75 | 3.36 | 1.66 | |
| 29 | RMSE | 5.32 | 2.87 | 1.77 | 0.86 |
| TIME | 0.021 | 0.063 | 0.115 | 0.175 | |
| MAE | 27.07 | 8.70 | 3.31 | 1.55 | |
| 30 | RMSE | 5.07 | 3.09 | 1.70 | 0.84 |
| TIME | 0.023 | 0.071 | 0.121 | 0.172 | |
| MAE | 25.69 | 8.31 | 3.26 | 1.58 | |
| 平均 | RMSE | 5.07 | 3.06 | 1.81 | 0.83 |
| TIME | 0.024 | 0.065 | 0.114 | 0.178 |
| 超参数 | 取值 |
|---|---|
| Eps | 1,5,10,15,20,25 |
| MinPts | 2,3,4,5 |
Table 6 Hyperparameter values
| 超参数 | 取值 |
|---|---|
| Eps | 1,5,10,15,20,25 |
| MinPts | 2,3,4,5 |
| MinPts | Eps | |||||
|---|---|---|---|---|---|---|
| 1 | 5 | 10 | 15 | 20 | 25 | |
| 2 | 0.129 | 0.688 | 0.739 | 0.715 | 0.699 | 0.721 |
| 3 | 0.141 | 0.523 | 0.645 | 0.577 | 0.554 | 0.632 |
| 4 | 0.109 | 0.317 | 0.559 | 0.468 | 0.324 | 0.511 |
| 5 | 0.032 | 0.047 | 0.069 | 0.091 | 0.121 | 0.152 |
Table 7 Model profile coefficients for different combinations of hyperparameters
| MinPts | Eps | |||||
|---|---|---|---|---|---|---|
| 1 | 5 | 10 | 15 | 20 | 25 | |
| 2 | 0.129 | 0.688 | 0.739 | 0.715 | 0.699 | 0.721 |
| 3 | 0.141 | 0.523 | 0.645 | 0.577 | 0.554 | 0.632 |
| 4 | 0.109 | 0.317 | 0.559 | 0.468 | 0.324 | 0.511 |
| 5 | 0.032 | 0.047 | 0.069 | 0.091 | 0.121 | 0.152 |

Fig.16 Representative trajectory of armored vehicle cluster
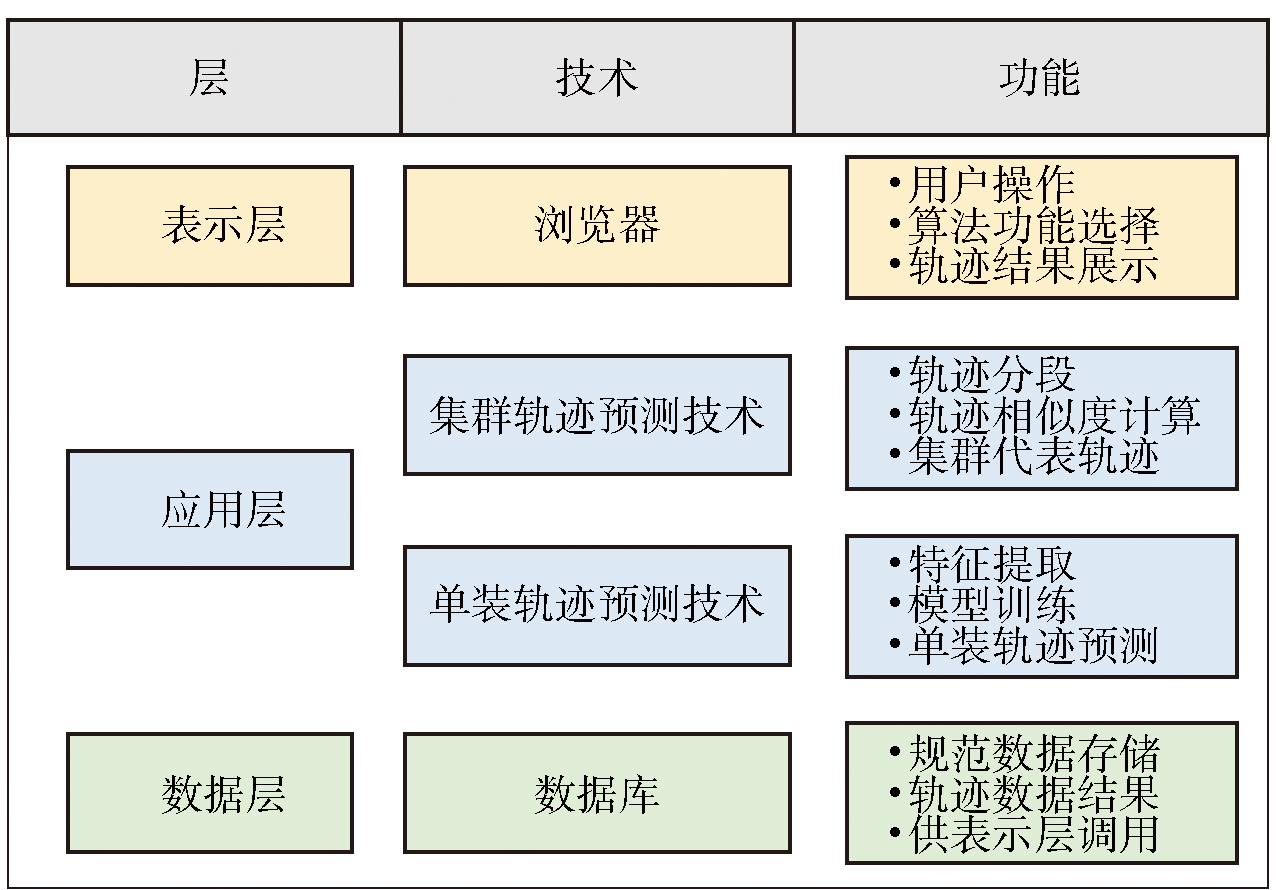
Fig.17 Architecture of trajectory prediction system

Fig.18 Cluster prediction trajectory for each phase of field combat scenario
| [1] |
杜志岐, 唐镜. 基于系统工程的装甲车辆总体设计[J]. 兵工学报, 2022, 43(增刊1): 1-10.
|
|
doi: 10.12382/bgxb.2022.A016 |
|
| [2] |
陈刚, 姚丽亚, 王国新, 等. 面向鲁棒决策的战场态势评估人机共识形成方法[J]. 兵工学报, 2022, 43(11): 2953-2964.
doi: 10.12382/bgxb.2021.0557 |
|
doi: 10.12382/bgxb.2021.0557 |
|
| [3] |
张堃, 杜睿怡, 时昊天, 等. 基于Mogrifier-BiGRU的飞行器轨迹预测[J]. 兵工学报, 2024, 45(2):373-384.
doi: 10.12382/bgxb.2022.0750 |
|
doi: 10.12382/bgxb.2022.0750 |
|
| [4] |
万宜春, 陈志龙, 何昌其, 等. 基于时空和作战编组的兵棋推演系统轨迹聚类算法[J]. 指挥控制与仿真, 2023, 45(1): 108-118.
doi: 10.3969/j.issn.1673-3819.2023.01.018 |
|
|
|
| [5] |
乔少杰, 韩楠, 朱新文, 等. 基于卡尔曼滤波的动态轨迹预测算法[J]. 电子学报, 2018, 46(2): 418-423.
doi: 10.3969/j.issn.0372-2112.2018.02.022 |
|
|
|
| [12] |
唐上钦, 魏政磊, 谢磊, 等. 基于机动单元库的TSO-GRU-Ada机动轨迹预测[J]. 兵工学报, 2022, 43(8): 1913-1925.
|
|
doi: 10.12382/bgxb.2021.0417 |
|
| [13] |
|
| [14] |
张百川, 毕文豪, 张安, 等. 基于Transformer模型的空战飞行器轨迹预测误差补偿方法[J]. 航空学报, 2023, 44(9): 291-304.
|
|
|
|
| [15] |
张永梅, 赖裕平, 马健喆, 等. 基于视频的装甲车和飞机检测跟踪及轨迹预测算法[J]. 兵工学报, 2021, 42(3):545-554.
doi: 10.3969/j.issn.1000-1093.2021.03.010 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.010 |
|
| [16] |
|
| [17] |
连静, 丁荣琪, 李琳辉, 等. 基于图模型和注意力机制的车辆轨迹预测方法[J]. 兵工学报, 2023, 44(7): 2162-2170.
doi: 10.12382/bgxb.2022.0117 |
|
doi: 10.12382/bgxb.2022.0117 |
|
| [18] |
杨春伟, 刘炳琪, 王继平, 等. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(增刊2):78-86.
|
|
doi: 10.12382/bgxb.2022.B002 |
|
| [19] |
郭立威, 王权, 高克斌, 等. 基于虚拟现实的装甲车辆运动仿真研究[J]. 计算机系统应用, 2019, 28(6):221-227.
|
|
|
|
| [20] |
刘妤, 谢铌, 张拓, 等. 履带车辆软坡地面力学建模及行驶性能分析[J]. 机械设计, 2021, 38 (3): 110-118.
|
|
|
|
| [21] |
宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512.
doi: 10.12305/j.issn.1001-506X.2023.02.22 |
|
doi: 10.12305/j.issn.1001-506X.2023.02.22 |
|
| [22] |
|
| [23] |
|
| [24] |
刘钰, 彭鹏菲. 基于改进DBSCAN的船舶轨迹聚类方法研究[J]. 舰船电子工程, 2022, 42(12): 57-63.
|
|
|
|
| [25] |
韩萍, 张启, 石庆研, 等. 基于DBSCAN-GRU算法的终端区4D航迹预测[J]. 信号处理, 2023, 39(3):439-449.
|
|
|
|
| [26] |
杨任农, 岳龙飞, 宋敏, 等. 基于Bi-LSTM的无人机轨迹预测模型及仿真[J]. 航空工程进展, 2020, 11(1):77-84.
|
|
|
|
| [27] |
俞庆英, 赵亚军, 叶梓彤, 等. 基于群组与密度的轨迹聚类算法[J]. 计算机工程, 2021, 47(4): 100-107.
doi: 10.19678/j.issn.1000-3428.0057425 |
|
doi: 10.19678/j.issn.1000-3428.0057425 |
|
| [28] |
杨家轩, 刘元. 基于DBTCAN算法的船舶轨迹聚类与航路识别[J]. 上海海事大学学报, 2022, 43(3):7-12.
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4): 680-688.
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
| [11] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3): 600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [28] |
|
| [29] |
李文杰, 闫世强, 蒋莹, 等. 自适应确定DBSCAN算法参数的算法研究[J]. 计算机工程与应用, 2019, 55(5): 1-7,148.
doi: 10.3778/j.issn.1002-8331.1809-0018 |
|
doi: 10.3778/j.issn.1002-8331.1809-0018 |
|
| [30] |
万佳, 胡大裟, 蒋玉明. 多密度自适应确定DBSCAN算法参数的算法研究[J]. 计算机工程与应用, 2022, 58(2): 78-85.
doi: 10.3778/j.issn.1002-8331.2012-0476 |
|
doi: 10.3778/j.issn.1002-8331.2012-0476 |
| [1] | DU Fu, DONG Mingming, WANG Hujiang, ZHAO Yanhui, ZHENG Fengjie. Semi-active Inertial Suspension Control Strategy for Tanks and Armored Vehicles Based on Quasi-zero.pngfness [J]. Acta Armamentarii, 2024, 45(9): 2929-2935. |
| [2] | YUE Wenbin, NING Gongtao, NI Yongliang, SONG Keling, HUANG Yu, WANG Zhiyuan, LI Yanming. Collaborative Optimization and Security Control of Source-grid-load-storage of Tank and Armored Vehicle Power System: Architecture Design and Frontier Thinking [J]. Acta Armamentarii, 2024, 45(8): 2463-2477. |
| [3] | PANG Hui, WANG Mingxiang, WANG Lei, ZHENG Lizhe. Design of Event Trigger-based Vibration Control for Active Suspension System [J]. Acta Armamentarii, 2024, 45(8): 2698-2711. |
| [4] | CHANG Tianqing, ZHANG Jie, ZHAO Liyang, HAN Bin, ZHANG Lei. Research on Armored Vehicle Detection Algorithm Based on Visible and Infrared Image Fusion [J]. Acta Armamentarii, 2024, 45(7): 2085-2096. |
| [5] | JI Wen, LI Chunna, JIA Xuyi, WANG Gang, GONG Chunlin. A High-spinning Projectile Aerodynamic Modeling Method Combining System Identification and Transfer Learning [J]. Acta Armamentarii, 2024, 45(7): 2197-2208. |
| [6] | LIU Yi, REN Jihuan, WU Xiang, BO Yuming. Newly Equipped Armored Vehicle Classification Based on Integrated Transfer Learning [J]. Acta Armamentarii, 2023, 44(8): 2319-2328. |
| [7] | SUN Xiaodong, JIN Xiaoping, XIE Fang, SUN Houjie, ZHENG Sijuan. Effects of Multimodal Warning and Cognitive Load on the Response of Armored Vehicle Occupants [J]. Acta Armamentarii, 2023, 44(4): 972-981. |
| [8] | REN Jihuan, WU Xiang, BO Yuming, WU Panlong, HE Shan. Ballistic Trajectory Prediction Based on Context-enhanced Long Short-Term Memory Network [J]. Acta Armamentarii, 2023, 44(2): 462-471. |
| [9] | DING Wei, MING Zhenjun, WANG Guoxin, YAN Yan. Dynamic Prediction Model Based on Multi-level LSTM Network for Multi-agent Attack and Defense Effectiveness [J]. Acta Armamentarii, 2023, 44(1): 176-192. |
| [10] | WANG Guo-sheng, YAO Ling-yu, WEI Lai-sheng, PIAO Yan, GU Liang. Research on the Influence of Linear Vibration of a Tank Chassis on On-the-move Shooting Accuracy [J]. Acta Armamentarii, 2016, 37(3): 541-546. |
| [11] | LUO Qing-guo, YIN Hong-tao, NING Xing-xing. A Design Method of Cooling System Principle Scheme Based on Directed Graph [J]. Acta Armamentarii, 2016, 37(1): 10-16. |
| [12] | LIU Wei-ping, NIE Jun-feng, JIN Yi, BAI Ya-juan. Research on Evaluation Method of Armored Vehicle Crew's Mental Workload Based on Task-network Model [J]. Acta Armamentarii, 2015, 36(9): 1805-1810. |
| [13] | DING Kai,QIAN Han-ming,CHEN Guo,RONG Ying-jiao,ZHU Yi-chao,SHI Jun-chao. Noise Reduction of Acoustic Signals from Armored Vehicles Based on CDBI-LPM [J]. Acta Armamentarii, 2015, 36(7): 1181-1187. |
| [14] | HAN Kun, HE Cheng-ming, LIU Wei-wei, SHEN Ying. Trade-off Analysis of Reliability/Maintainability/Supportability/Testability of Armored Vehicle Based on System Effectiveness [J]. Acta Armamentarii, 2014, 35(2): 268-272. |
| [15] | CAO He-quan, ZHANG Guang-ming, SUN Su-jie, SUN Bao-sen. Status and Development of Protection Technology of Armored Vehicles [J]. Acta Armamentarii, 2012, 33(12): 1549-1554. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||