
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (1): 231-240.doi: 10.12382/bgxb.2023.0351
Previous Articles Next Articles
YU Zhilong1, LI Yinghui1,*( ), PEI Binbin1, XU Wenfeng1, DUAN Xiaocong2, SONG Kexin3
), PEI Binbin1, XU Wenfeng1, DUAN Xiaocong2, SONG Kexin3
Received:2023-04-18
Online:2024-01-30
Contact:
LI Yinghui
CLC Number:
YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints[J]. Acta Armamentarii, 2024, 45(1): 231-240.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Configuration of control surface of tailless flying-wing UAV
Fig.2 Control structure of the proposed robust adaptive control scheme
Fig.3 Attitude and its tracking errors of the flying-wing UAV with the proposed method and the method in Ref.[20]
Fig.4 Angular velocity and its tracking errors of the flying-wing UAV with the proposed method and the method in Ref.[20]
| 方法 | 姿态 | 角速度 | E | AAD | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE | IAE | ITAE | RMSE | IAE | ITAE | |||
| 本文方法 | 0.150 | 1.050 | 14.927 | 1.180 | 12.356 | 193.883 | 530 | 210 |
| 文献[20]方法 | 0.230 | 2.442 | 39.272 | 1.677 | 24.2153 | 394.294 | 588 | 235 |
Table 1 Performance evaluation for different control schemes
| 方法 | 姿态 | 角速度 | E | AAD | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE | IAE | ITAE | RMSE | IAE | ITAE | |||
| 本文方法 | 0.150 | 1.050 | 14.927 | 1.180 | 12.356 | 193.883 | 530 | 210 |
| 文献[20]方法 | 0.230 | 2.442 | 39.272 | 1.677 | 24.2153 | 394.294 | 588 | 235 |
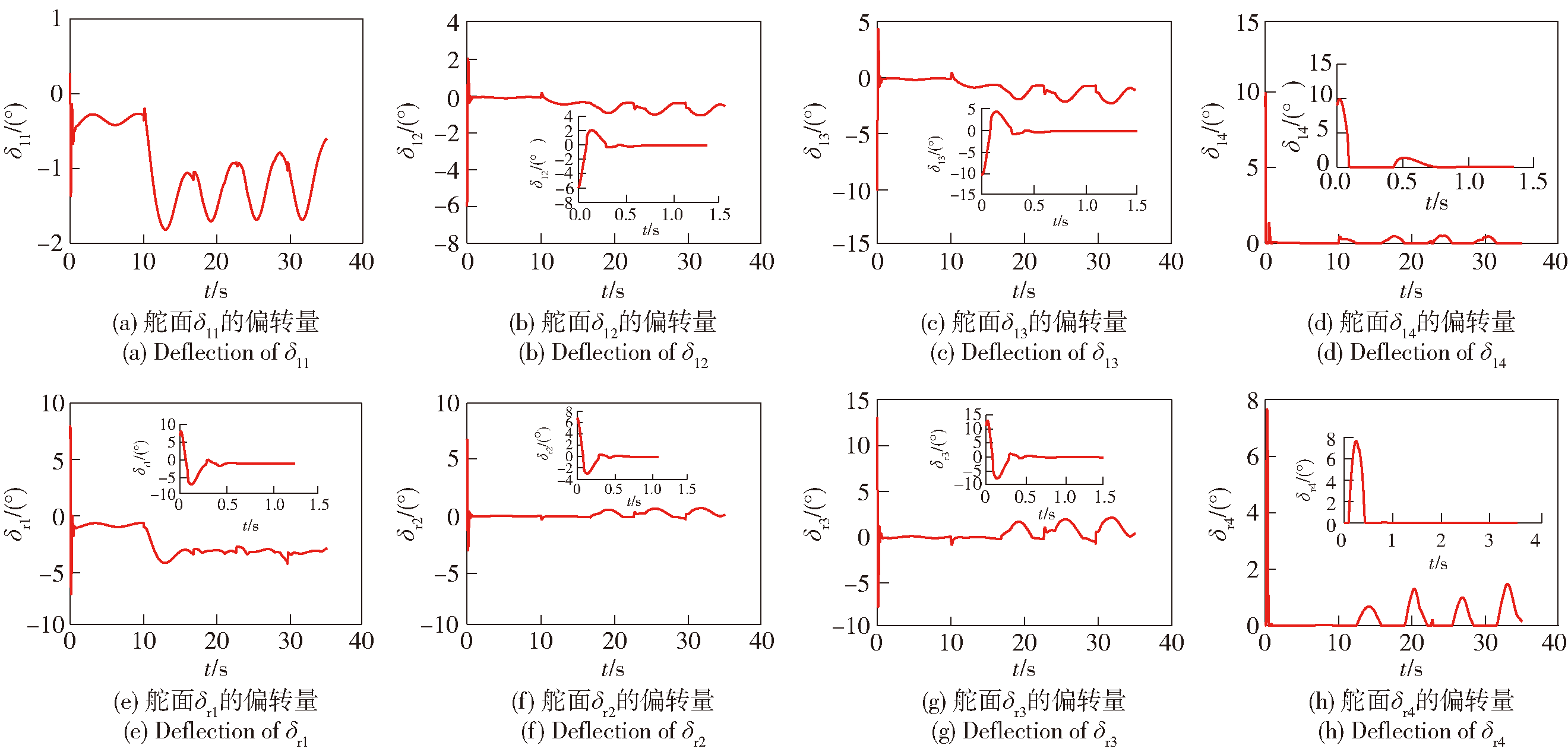
Fig.5 Actuator deflection trajectories of flying-wing UAV
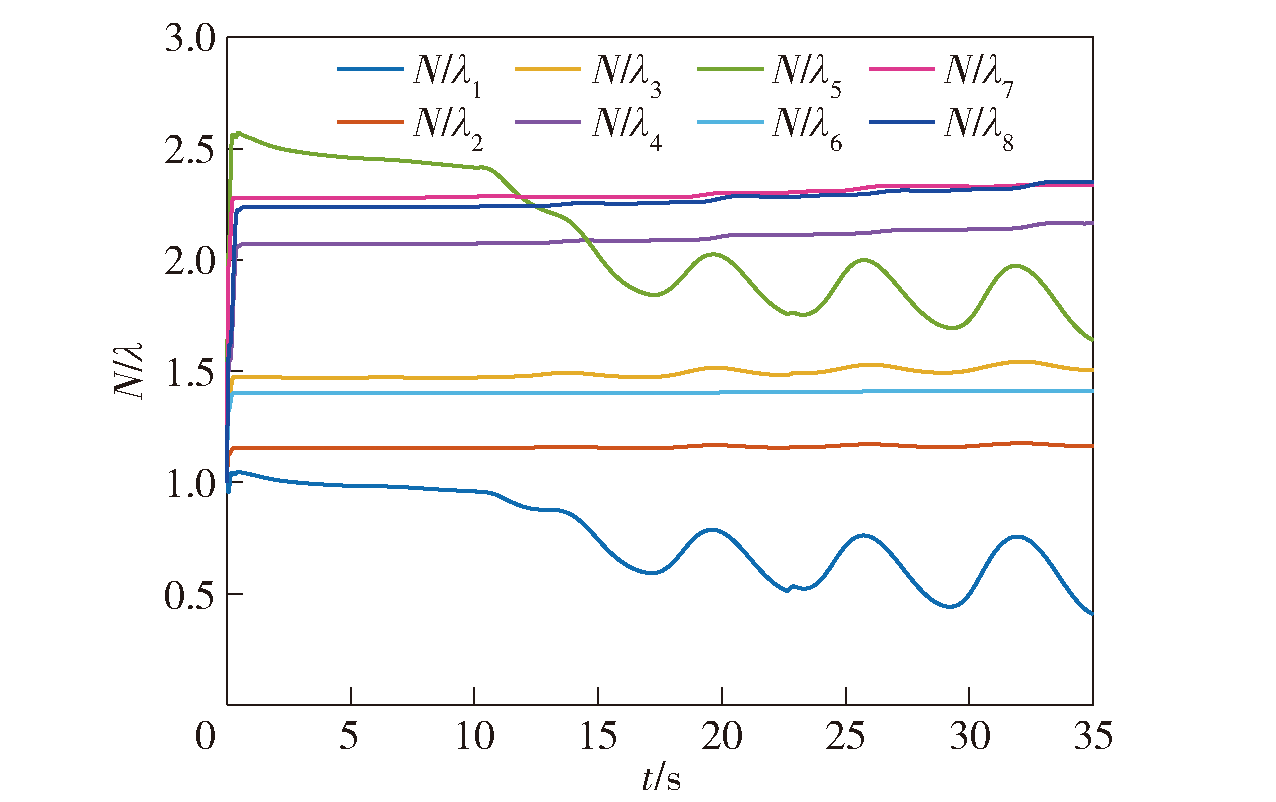
Fig.6 Curves of Nussbaum gain
| [1] |
郭雷, 余翔, 张霄, 等. 无人机安全控制系统技术:进展与展望[J]. 中国科学:信息科学, 2020, 50(2):184-194.
|
|
doi: 10.1360/SSI-2019-0101 URL |
|
| [2] |
陈谋, 马浩翔, 雍可南, 等. 无人机安全飞行控制综述[J]. 机器人, 2023, 45(3): 345-366.
doi: 10.13973/j.cnki.robot.220392 |
|
doi: 10.13973/j.cnki.robot.220392 |
|
| [3] |
doi: S0019-0578(19)30119-3 pmid: 30902496 |
| [4] |
徐明兴. 考虑非线性影响的飞翼布局无人机多舵面分配方法研究[D]. 西安: 西北工业大学, 2014.
|
|
|
|
| [5] |
李炳乾, 董文瀚, 马小山. 无人机编队保持反步容错控制[J]. 兵工学报, 2018, 39(11):2172-2184.
doi: 10.3969/j.issn.1000-1093.2018.11.011 |
|
|
|
| [6] |
|
| [7] |
|
| [8] |
doi: 10.1007/s12555-017-0454-y |
| [9] |
doi: 10.1016/j.isatra.2021.03.011 URL |
| [10] |
doi: 10.1002/rnc.v33.6 URL |
| [11] |
doi: 10.1109/87.987075 URL |
| [12] |
禹志龙, 李颖晖, 郑无计, 等. 复杂结冰环境下飞机鲁棒飞行安全包线分析[J]. 航空学报, 2020, 41(1):115-123.
|
|
|
|
| [13] |
doi: 10.1016/j.ast.2019.105429 URL |
| [14] |
doi: 10.1007/s11071-016-3196-0 URL |
| [15] |
doi: 10.1016/j.ins.2019.08.012 URL |
| [16] |
doi: 10.1016/j.ymssp.2020.107406 URL |
| [17] |
doi: 10.1109/TMECH.3516 URL |
| [18] |
doi: 10.1109/TMECH.2021.3108558 URL |
| [19] |
doi: 10.1007/s11071-022-07904-7 |
| [20] |
doi: 10.1016/j.automatica.2016.10.011 URL |
| [21] |
doi: 10.1016/j.automatica.2014.10.079 URL |
| [22] |
doi: 10.1016/j.ast.2017.07.036 URL |
| [23] |
|
|
|
| [1] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [2] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [3] | MIN Boxu, GAO Jian, JING Anyan, CHEN Yimin, WANG Jiarun, PAN Guang. Robust Event-triggered Adaptive Pitch Attitude Control for Underwater Gliders with Actuator Faults [J]. Acta Armamentarii, 2023, 44(7): 2092-2100. |
| [4] | LI Xianyan, XU Wei, JIANG Lei, SUN Zeyuan, XIE Qiang, ZENG Yi, ZHENG Dongdong. Adaptive Prescribed Performance Control of Autonomous Vehicles with Input Saturation [J]. Acta Armamentarii, 2023, 44(11): 3310-3319. |
| [5] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [6] | YUAN Shusen, DENG Wenxiang, YAO Jianyong, YANG Guolai. Adaptive Integral Robust Control for the Bidirectional Stability System of All-electric Tanks [J]. Acta Armamentarii, 2023, 44(1): 140-155. |
| [7] | ZHU Yi, CHEN Xin, LI Chun-tao, YANG Yi. Static Projective Control of Fly-wing UAV Considering Wind Disturbance [J]. Acta Armamentarii, 2015, 36(7): 1237-1246. |
| [8] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming, HE Bin. AUV's Depth Control Based on Reconstructive Fault-tolerant Control [J]. Acta Armamentarii, 2015, 36(4): 723-730. |
| [9] | XIE Zheng, XIE Jian, DU Wen-zheng, LI Liang, GUO Yang. Sliding Mode Control for Hydraulic Erecting System of Large Launcher [J]. Acta Armamentarii, 2015, 36(4): 674-680. |
| [10] | ZHANG Yi-chao, ZHOU Xu-chang, ZHOU Hao. Decentralized Adaptive Variable Structure Control for Banktoturn Torpedo [J]. Acta Armamentarii, 2013, 34(11): 1469-1473. |
| [11] | LI Wei, WANG Yan-fei. The Less-conservative Robust Guaranteed Cost Fault-Tolerant Control of Networked Control Systems [J]. Acta Armamentarii, 2012, 33(2): 170-178. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||