
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (1): 219-230.doi: 10.12382/bgxb.2023.0362
Previous Articles Next Articles
ZHOU Yue1, LI Zhuangzhuang1, ZHENG Ranshun2, LI Jun1,*( )
)
Received:2023-04-21
Online:2024-01-30
Contact:
LI Jun
CLC Number:
ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster[J]. Acta Armamentarii, 2024, 45(1): 219-230.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Installation of a booster rocket engine
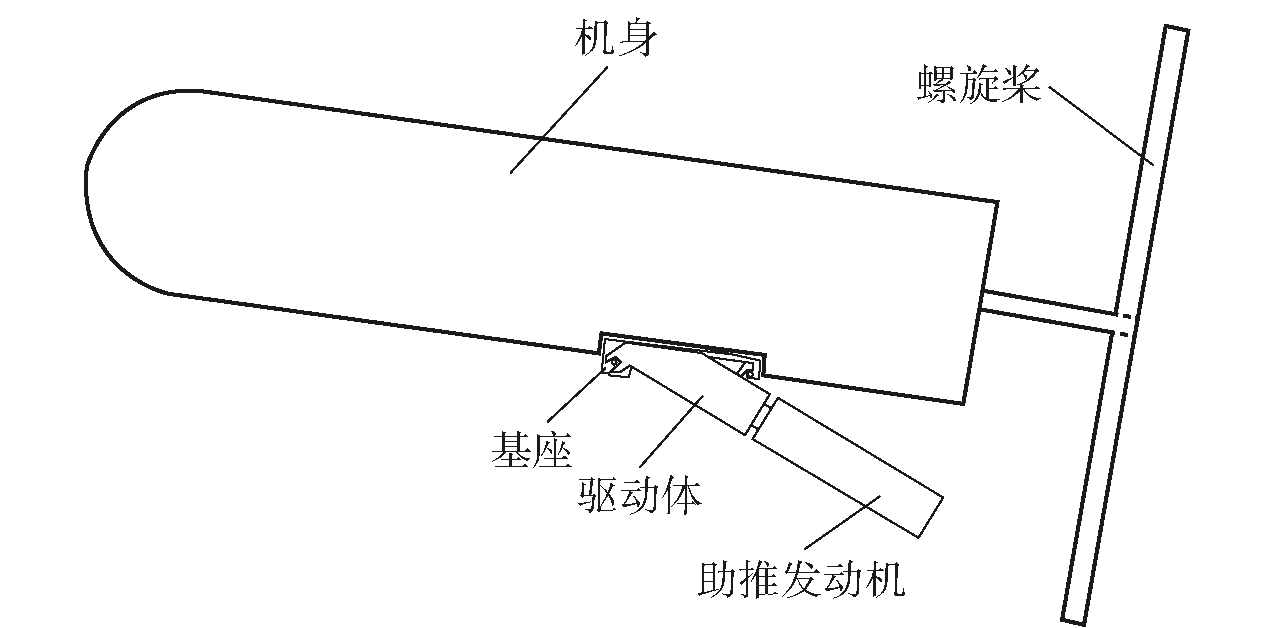
Fig.2 Schematic diagram of UAV and booster
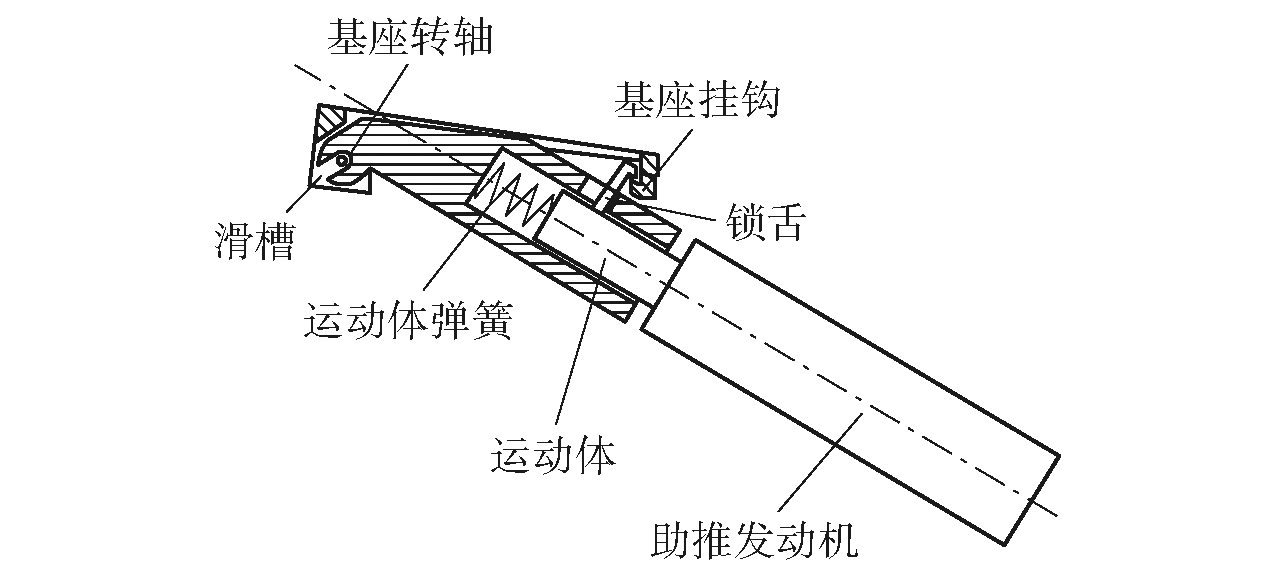
Fig.3 Schematic diagram of booster principle
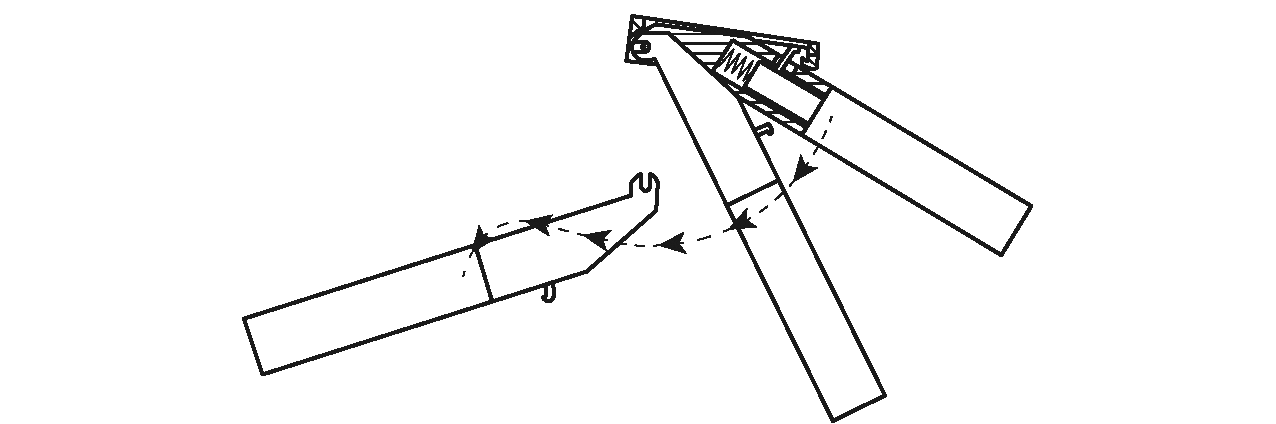
Fig.4 Schematic diagram of booster separation process
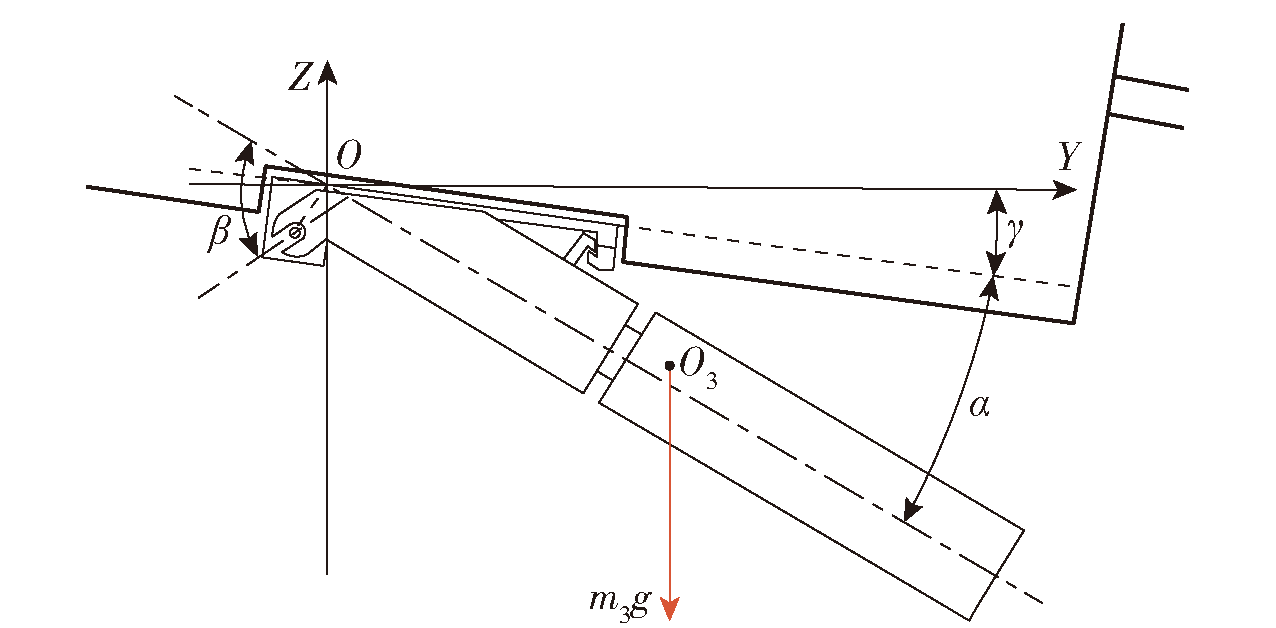
Fig.5 UAV coordinate system
Fig.6 Booster coordinate system
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| m1/kg | 驱动体质量 | m2/kg | 发动机分离质量 |
| O1/mm | 駆动体质心 | O2/mm | 发动机质心 |
| m3/kg | 助推机构质量 | O3/mm | 助推机构质心 |
| (x1,y1)/mm | 驱动体质心坐标 | (x2,y2)/mm | 助推发动机质心坐标 |
| I1/(kg·m2) | 驱动体转动惯量 | I2/(kg·m2) | 助推发动机转动惯量 |
| (x3,y3)/mm | 助推机构质心坐标 | I3/(kg·m2) | 助推机构转动惯量 |
| l1/mm | 驱动体长度 | l2/m | 助推发动机长度 |
| r0/mm | 基座转轴半径 | r/mm | 助推发动机半径 |
| α/(°) | 推力角 | γ/(°) | 仰角 |
| β/(°) | 滑槽角 | Fmax/N | 推力峰值 |
| δ/mm | 推力偏置距离 | Ft/N | 稳定推力值 |
Table 1 Structure parameters of booster
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| m1/kg | 驱动体质量 | m2/kg | 发动机分离质量 |
| O1/mm | 駆动体质心 | O2/mm | 发动机质心 |
| m3/kg | 助推机构质量 | O3/mm | 助推机构质心 |
| (x1,y1)/mm | 驱动体质心坐标 | (x2,y2)/mm | 助推发动机质心坐标 |
| I1/(kg·m2) | 驱动体转动惯量 | I2/(kg·m2) | 助推发动机转动惯量 |
| (x3,y3)/mm | 助推机构质心坐标 | I3/(kg·m2) | 助推机构转动惯量 |
| l1/mm | 驱动体长度 | l2/m | 助推发动机长度 |
| r0/mm | 基座转轴半径 | r/mm | 助推发动机半径 |
| α/(°) | 推力角 | γ/(°) | 仰角 |
| β/(°) | 滑槽角 | Fmax/N | 推力峰值 |
| δ/mm | 推力偏置距离 | Ft/N | 稳定推力值 |
Fig.7 Schematic diagram of booster separation process
Fig.8 Schematic diagram of booster separation process
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| γ/(°) | 10 | r0/m | 0.025 |
| α/(°) | 25 | β/(°) | 待优化 |
| (x3,y3)/m | $\left(\frac{0.5 l_{1}+6 \times\left(l_{1}+0.268\right)}{m_{1}+7}, 0\right) $ | m2/kg | 6 |
| I3/(kg·m-2) | m1(0.0075+ )+6(l1+0.268-x3)2+m1(x3- l1)2+0.1474 | (x2,y2)/m | (l1+0.268,0) |
| δ/m | 0.015 | I2/(kg·m-2) | 0.1474 |
| m1/kg | 待优化 | l2/m | 0.536 |
| (x1,y1)/m | ( l1,0) | r/m | 0.05 |
| I1/(kg·m-2) | m1(0.0075+ ) | Fmax/kN | 9.3 |
| l1/m | 待优化 | Ft/kN | 8.0 |
Table 2 Parameters of a UAV booster
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| γ/(°) | 10 | r0/m | 0.025 |
| α/(°) | 25 | β/(°) | 待优化 |
| (x3,y3)/m | $\left(\frac{0.5 l_{1}+6 \times\left(l_{1}+0.268\right)}{m_{1}+7}, 0\right) $ | m2/kg | 6 |
| I3/(kg·m-2) | m1(0.0075+ )+6(l1+0.268-x3)2+m1(x3- l1)2+0.1474 | (x2,y2)/m | (l1+0.268,0) |
| δ/m | 0.015 | I2/(kg·m-2) | 0.1474 |
| m1/kg | 待优化 | l2/m | 0.536 |
| (x1,y1)/m | ( l1,0) | r/m | 0.05 |
| I1/(kg·m-2) | m1(0.0075+ ) | Fmax/kN | 9.3 |
| l1/m | 待优化 | Ft/kN | 8.0 |
Fig.9 Separation process of 50° chute angle booster
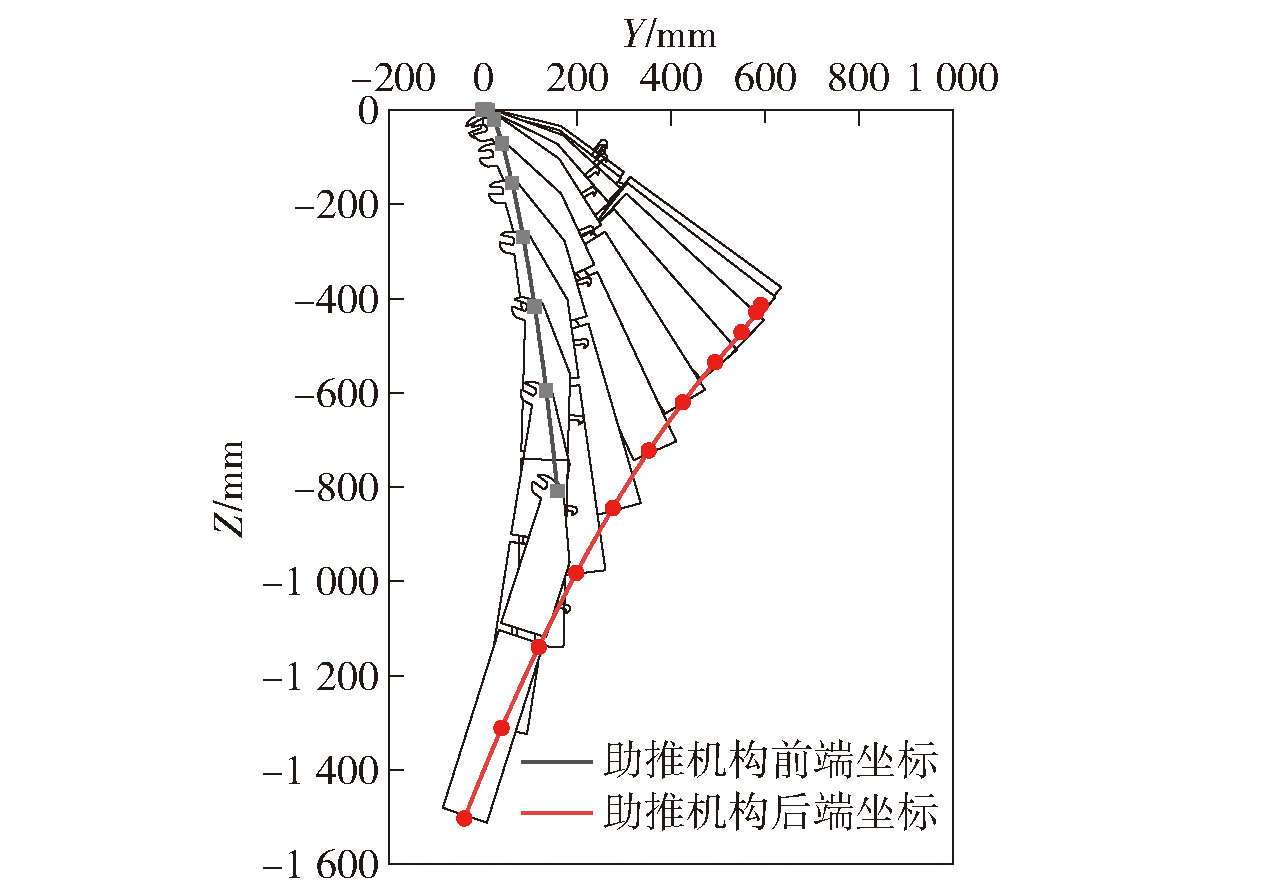
Fig.10 Separation process of 70° chute angle booster
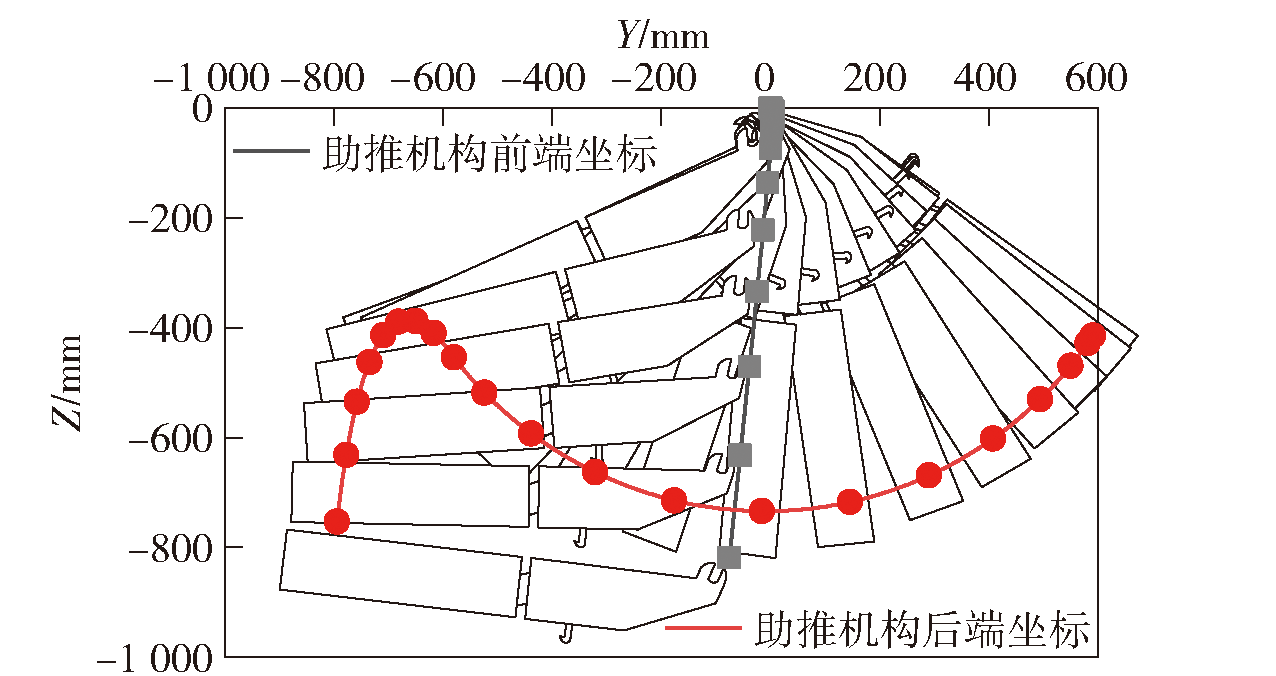
Fig.11 Separation process of 90° chute angle booster
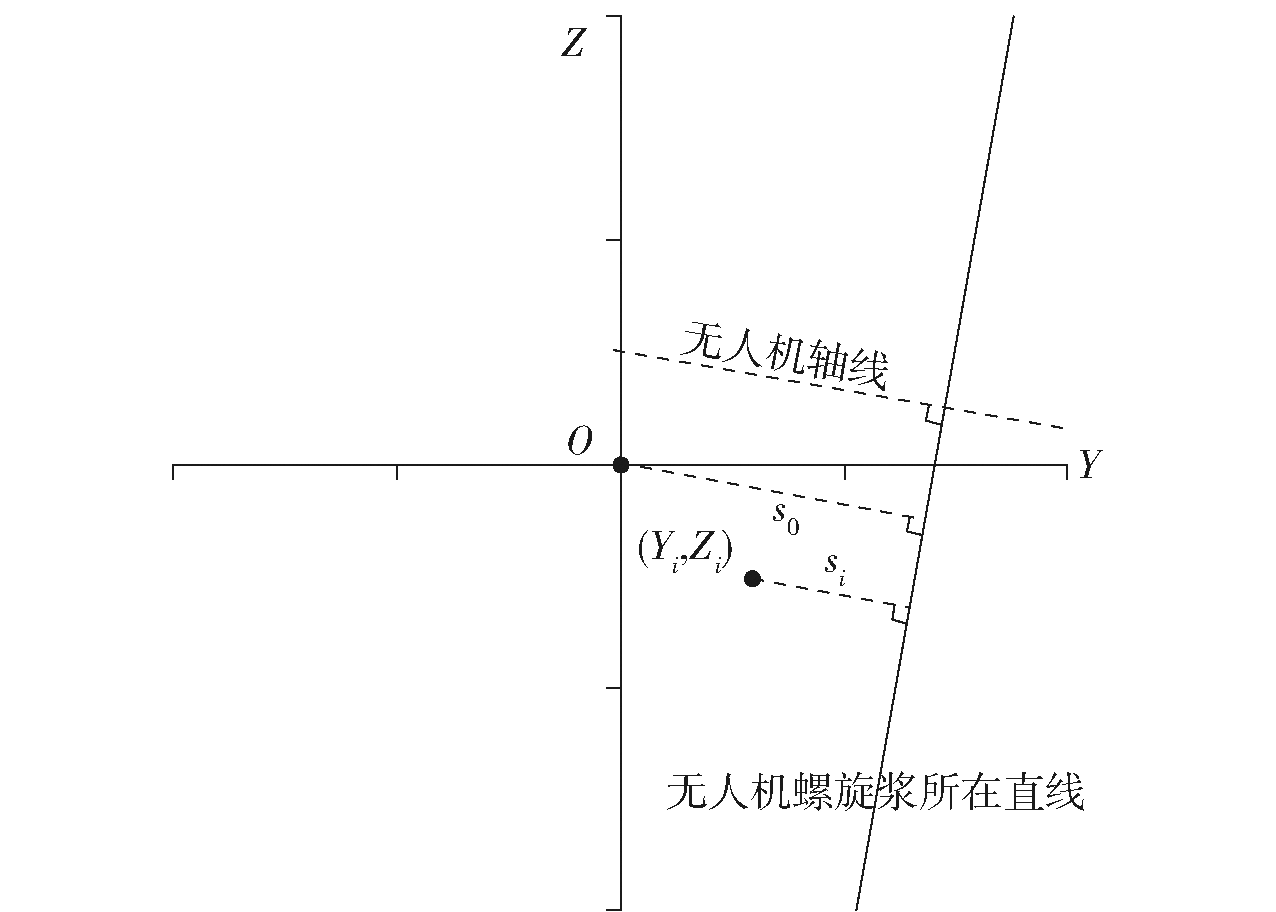
Fig.12 Schematic diagram of booster coordinate position relationship
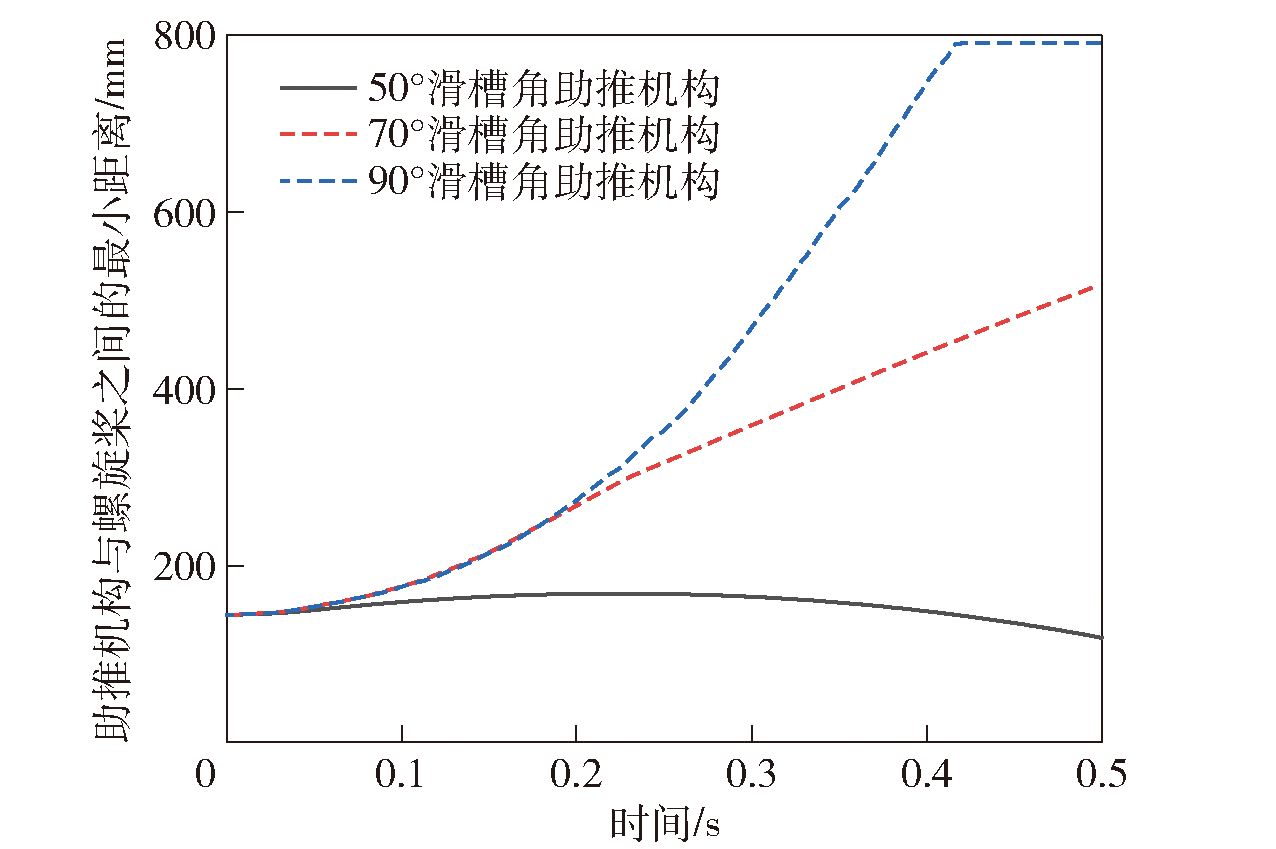
Fig.13 Curves of minimum distance between booster and propeller over time

Fig.14 Booster experimental model
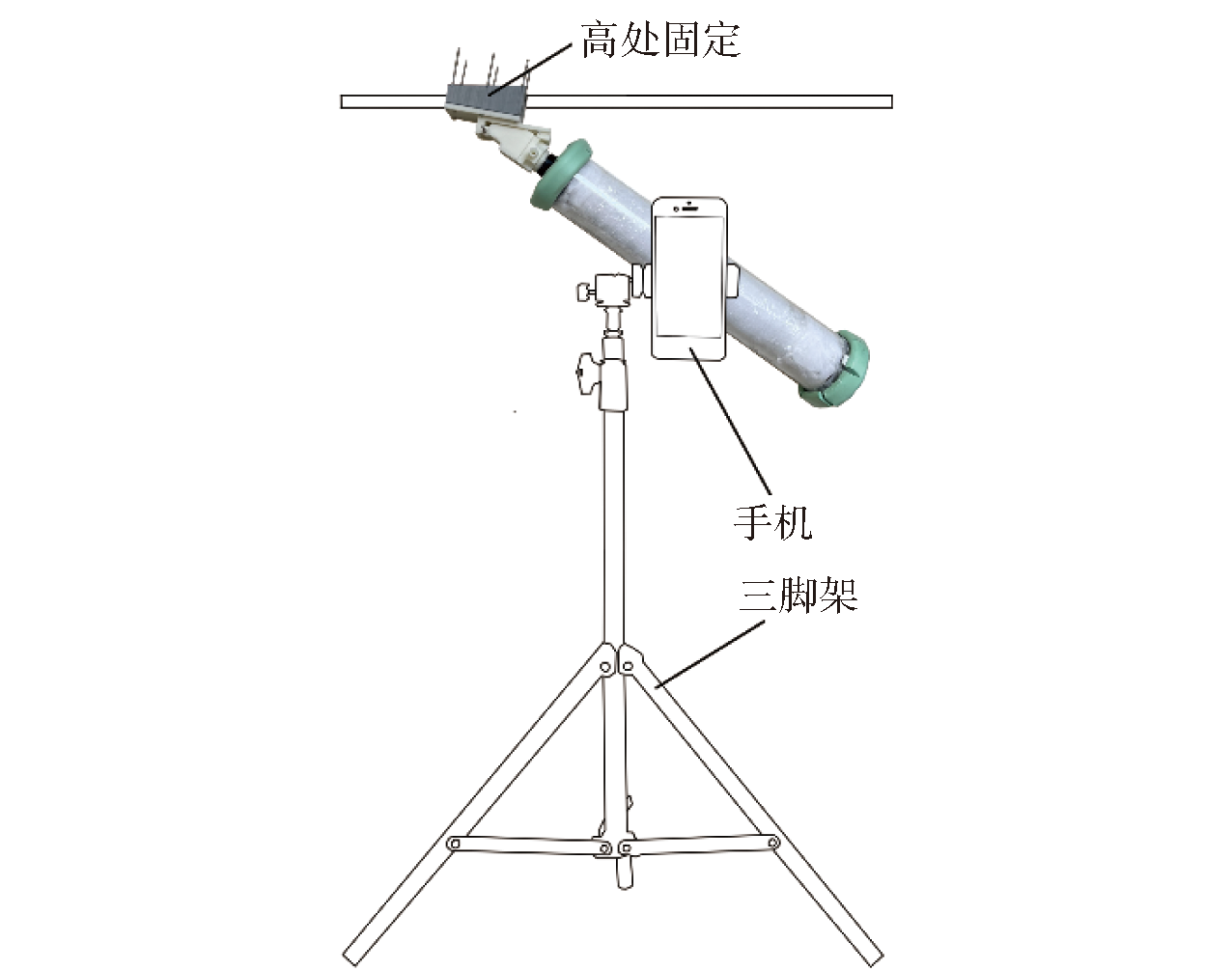
Fig.15 Schematic diagram of experimental system
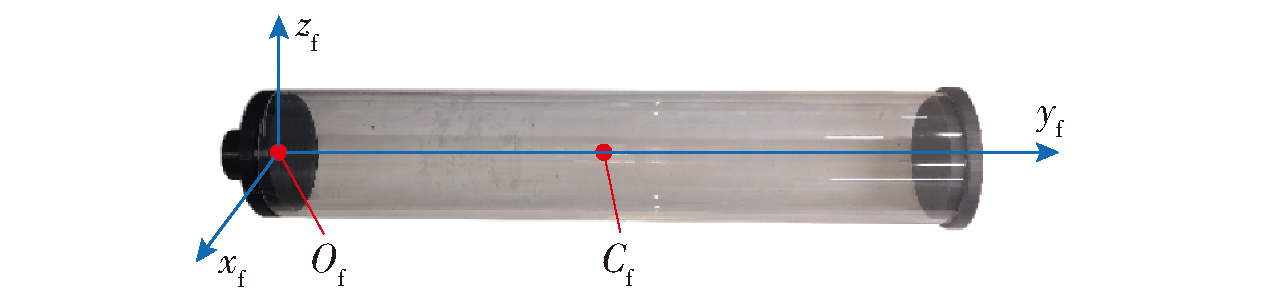
Fig.16 Coordinate system of booster engine
| 助推发动机相关参数 | 数值 |
|---|---|
| 质量/kg | 6.0±0.1 |
| 质心距离 /mm | 322.6 |
| 质心赤道转动惯量Ixc/(kg·mm2) | 80445.0 |
| 质心赤道转动惯量Izc/(kg·mm2) | 80445.1 |
| 质心极转动惯量Iyc/(kg·mm2) | 3701.0 |
Table 3 Experimental model data
| 助推发动机相关参数 | 数值 |
|---|---|
| 质量/kg | 6.0±0.1 |
| 质心距离 /mm | 322.6 |
| 质心赤道转动惯量Ixc/(kg·mm2) | 80445.0 |
| 质心赤道转动惯量Izc/(kg·mm2) | 80445.1 |
| 质心极转动惯量Iyc/(kg·mm2) | 3701.0 |

Fig.17 Separation trajectories of experimental model
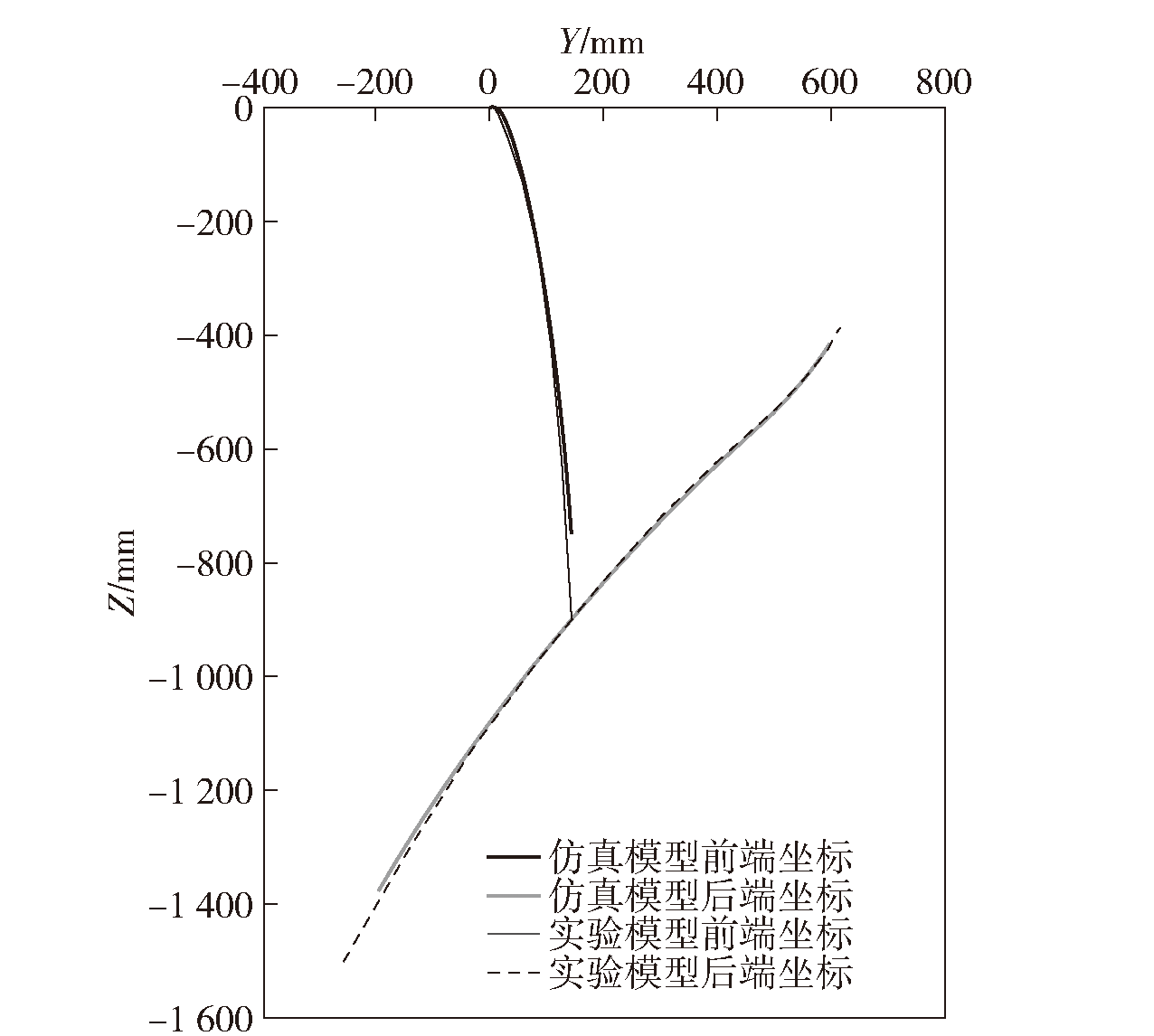
Fig.18 Coordinate comparison between experimental model and simulation model
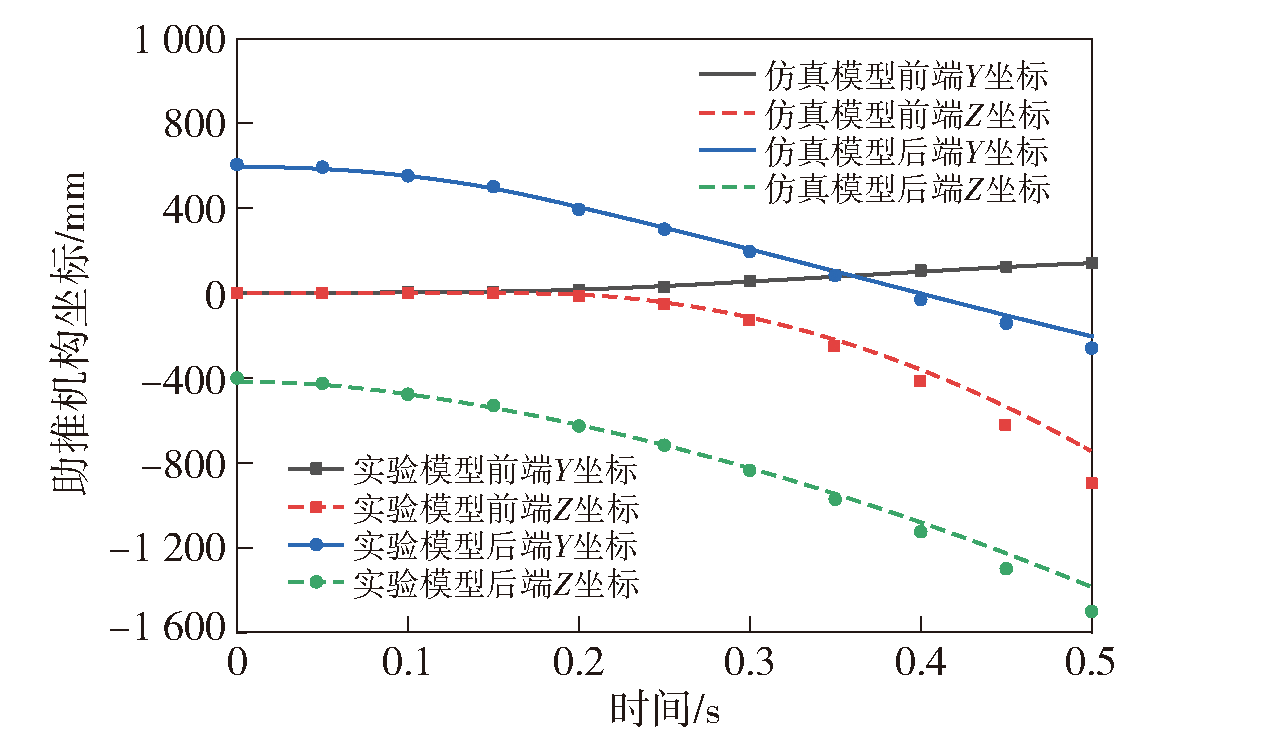
Fig.19 Front-end and back-end coordinates of booster-time curves
| 前后端坐标 差值 | 时间/s | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | 0.25 | 0.30 | 0.35 | 0.40 | 0.45 | 0.50 | |
| 前端Y坐标差值/mm | 0 | 1.24 | 2.69 | 0.06 | -2.78 | -4.72 | 1.00 | 5.64 | 5.05 | 1.85 | 0.45 |
| 前端Z坐标差值/mm | 0 | -0.71 | -1.38 | -1.37 | -7.27 | -7.55 | -15.16 | -33.69 | -58.43 | -88.34 | -150.11 |
| 后端Y坐标差值/mm | 10.85 | 8.45 | 0.26 | 8.88 | -11.01 | -6.94 | -11.45 | -19.43 | -29.26 | -37.43 | -55.77 |
| 后端Z坐标差值/mm | 17.24 | 7.31 | -0.08 | 11.11 | -5.01 | -0.51 | -10.05 | -25.63 | -44.50 | -72.55 | -114.53 |
Table 4 Difference between the coordinates of front-end and back-end of booster
| 前后端坐标 差值 | 时间/s | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | 0.25 | 0.30 | 0.35 | 0.40 | 0.45 | 0.50 | |
| 前端Y坐标差值/mm | 0 | 1.24 | 2.69 | 0.06 | -2.78 | -4.72 | 1.00 | 5.64 | 5.05 | 1.85 | 0.45 |
| 前端Z坐标差值/mm | 0 | -0.71 | -1.38 | -1.37 | -7.27 | -7.55 | -15.16 | -33.69 | -58.43 | -88.34 | -150.11 |
| 后端Y坐标差值/mm | 10.85 | 8.45 | 0.26 | 8.88 | -11.01 | -6.94 | -11.45 | -19.43 | -29.26 | -37.43 | -55.77 |
| 后端Z坐标差值/mm | 17.24 | 7.31 | -0.08 | 11.11 | -5.01 | -0.51 | -10.05 | -25.63 | -44.50 | -72.55 | -114.53 |
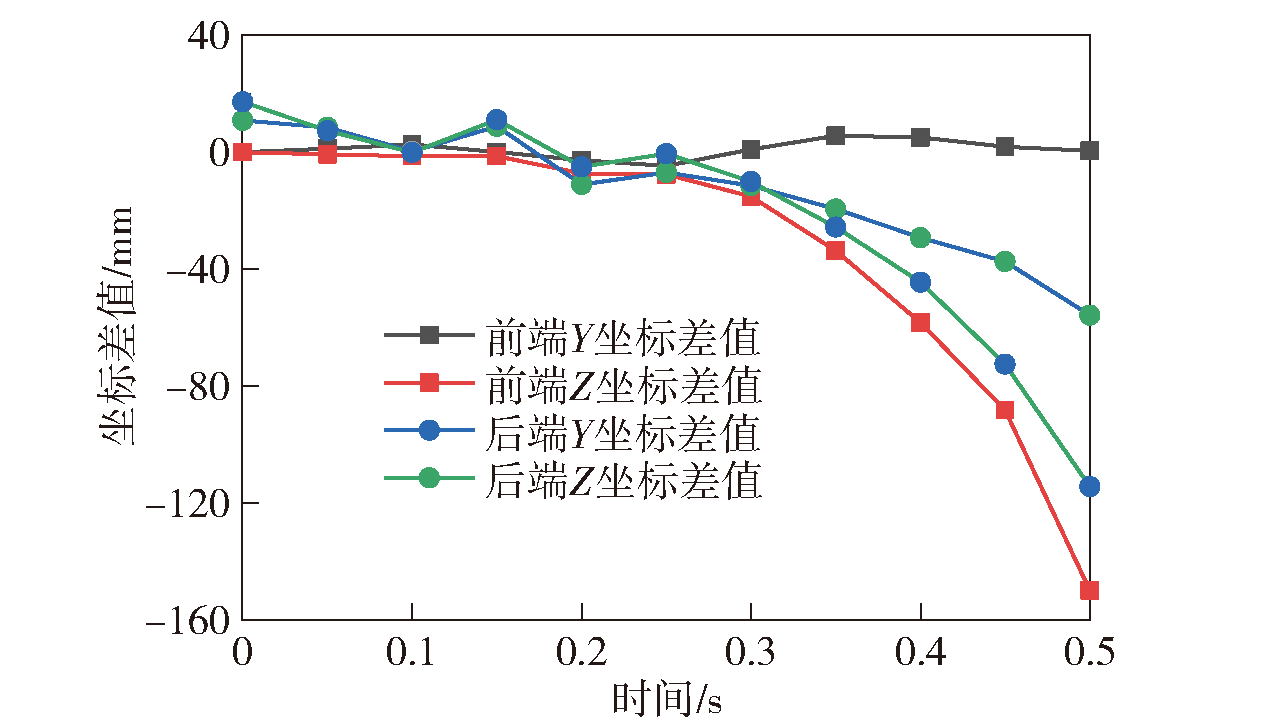
Fig.20 Coordinate difference between booster front-end and back-end-time curvs
| [1] |
于存贵, 李志刚. 火箭发射系统分析[M]. 北京: 国防工业出版社, 2012.
|
|
|
|
| [2] |
张琳, 龚喜盈, 张晓辉. 火箭助推零长发射建模仿真研究[J]. 火力与指挥控制, 2019, 44(8):150-154.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
姚琳, 王晓东. 无人机助推起飞过程影响因素敏感度分析[J]. 兵器装备工程学报, 2020, 41(10):81-85.
|
|
|
|
| [6] |
刘付平, 郑耀, 谢芳芳, 等. 助推火箭安装偏差对小型无人机发射安全的影响[J]. 哈尔滨工程大学学报, 2018, 39(8):1343-1348.
|
|
|
|
| [7] |
陶于金. 小型固定翼无人机零长发射参数安全边界研究[J]. 海军航空工程学院学报, 2017, 32(5):447-451,468.
|
|
|
|
| [8] |
王晓东, 夏杨, 涂金岽. 一种无人机火箭助推器脱落导向结构: CN211281514U[P]. 2020-08-18.
|
|
|
|
| [9] |
陈刚. 无人机单(双)火箭助推发射安全性对比分析[J]. 四川兵工学报, 2021, 42(8): 27-32.
|
|
|
|
| [10] |
|
| [11] |
doi: 10.1016/j.apm.2023.03.030 URL |
| [12] |
乐文超, 朱晓, 宁月敏, 等. 基于fmincon的扭杆悬架弹簧优化设计[J]. 上海汽车, 2018(6): 13-18.
|
|
|
|
| [13] |
doi: 10.1016/j.ijmecsci.2022.107771 URL |
| [14] |
doi: 10.1016/j.vehcom.2023.100600 URL |
| [15] |
doi: 10.1016/j.ast.2023.108257 URL |
| [16] |
王盼, 吴昊, 梁宇, 等. 轻型无人机起落架设计与强度分析[J]. 兵工学报, 2022, 43(增刊1):140-145.
|
|
doi: 10.12382/bgxb.2022.A023 |
|
| [17] |
doi: 10.1016/j.mechmachtheory.2020.104140 URL |
| [18] |
doi: 10.1016/j.ast.2023.108156 URL |
| [19] |
doi: 10.1016/j.ast.2023.108253 URL |
| [20] |
doi: 10.1016/j.ast.2022.108063 URL |
| [1] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [2] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [3] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [4] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| [5] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [6] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [7] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [8] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [9] | ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces [J]. Acta Armamentarii, 2023, 44(6): 1837-1845. |
| [10] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [11] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [12] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, MOU Zhi-ying. Coalition Formation of Multiple Heterogeneous Unmanned Aerial Vehicles in Cooperative Search and Attack in UnknownEnvironment [J]. Acta Armamentarii, 2015, 36(12): 2284-2297. |
| [13] | WANG Xiao-peng, WANG Yu-shi, WEN Quan, FENG Yan-zhe, SU Hong-wei. Force Analysis for the Fuze on the Motion of a Unrotating Projectile Around the Center of Mass in Exterior Ballistics [J]. Acta Armamentarii, 2015, 36(1): 53-57. |
| [14] | TANG Chuan-lin,HUANG Chang-qiang,DU Hai-wen,HUANG Han-qiao,DING Da-li,LUO Chang. Study of Trajectory Planning for UCAV Formation Cooperative Attack [J]. Acta Armamentarii, 2014, 35(4): 523-530. |
| [15] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, XI Wen-qing. Three-dimensional Path tracking Guidance and Control for Unmanned Aerial Vehicle Based on Back-stepping andNonlinear Dynamic Inversion [J]. Acta Armamentarii, 2014, 35(12): 2030-2040. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||