
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2849-2858.doi: 10.12382/bgxb.2022.0669
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
LI Zenglin1, LI Bo1,*( ), BAI Shuangxia1, MENG Bobo2
), BAI Shuangxia1, MENG Bobo2
Received:2022-07-25
Online:2022-11-12
Contact:
LI Bo
CLC Number:
LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC[J]. Acta Armamentarii, 2023, 44(9): 2849-2858.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Air combat situation map
Fig.2 Diagram of missile attack zone

Fig.3 Schematic diagram of QKV model
Fig.4 Structure diagram of AM-SAC algorithm
Fig.5 Flow of AM-SAC algorithm
| 敌方对我方相 对方位角/(°) | 我方对敌方相对 方位角/(°) | 相对初始 距离/km |
|---|---|---|
| 96.64 | 171.04 | 7.46 |
Table 1 Initial state of test environment
| 敌方对我方相 对方位角/(°) | 我方对敌方相对 方位角/(°) | 相对初始 距离/km |
|---|---|---|
| 96.64 | 171.04 | 7.46 |
| 作战方 | X/ km | Y/ km | Z/ km | 俯仰 角/(°) | 航向 角/(°) | 速度/ (m·s-1) |
|---|---|---|---|---|---|---|
| 红方 | 2 | 3.5 | -3 | 2 | 50 | 70 |
| 蓝方 | -3.5 | 3 | 2 | 1 | -40 | 70 |
Table 2 Initial position information of both sides
| 作战方 | X/ km | Y/ km | Z/ km | 俯仰 角/(°) | 航向 角/(°) | 速度/ (m·s-1) |
|---|---|---|---|---|---|---|
| 红方 | 2 | 3.5 | -3 | 2 | 50 | 70 |
| 蓝方 | -3.5 | 3 | 2 | 1 | -40 | 70 |
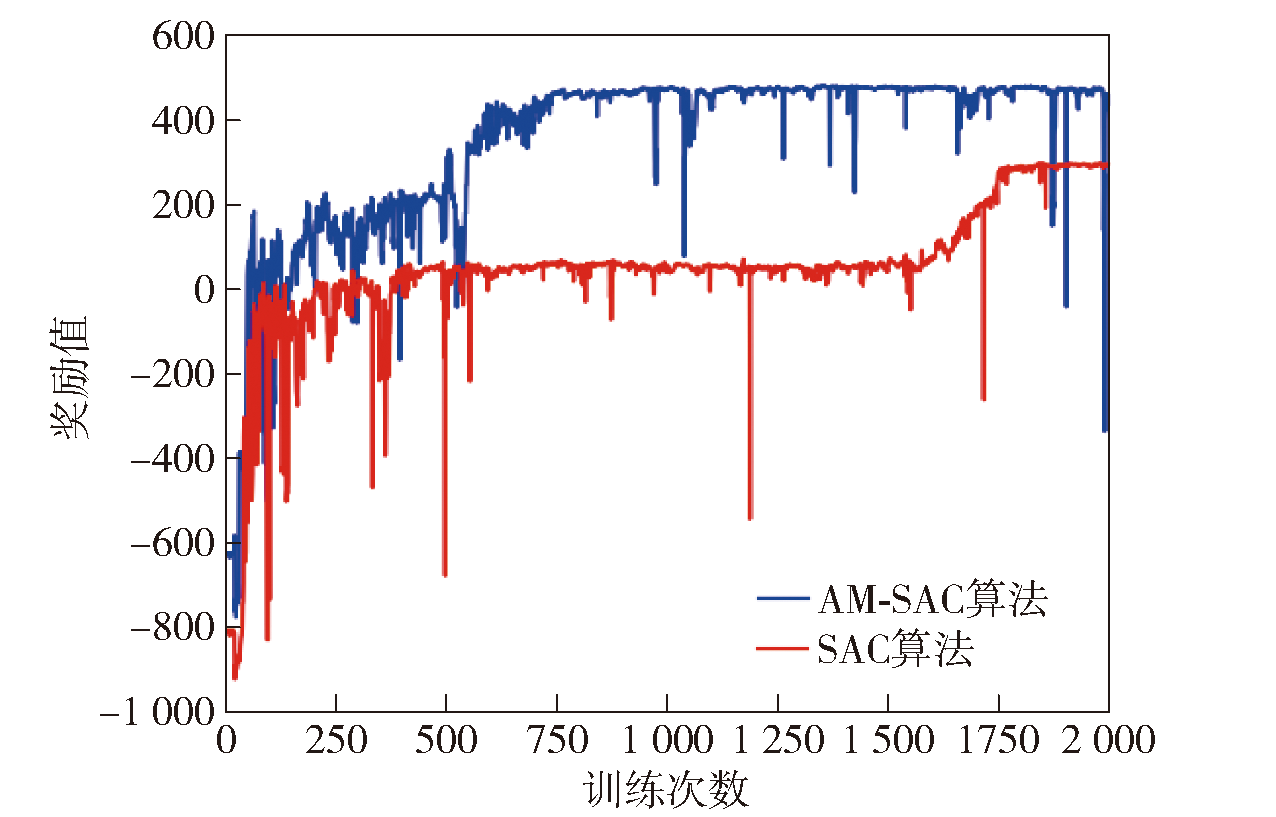
Fig.6 Comparison of reward curves
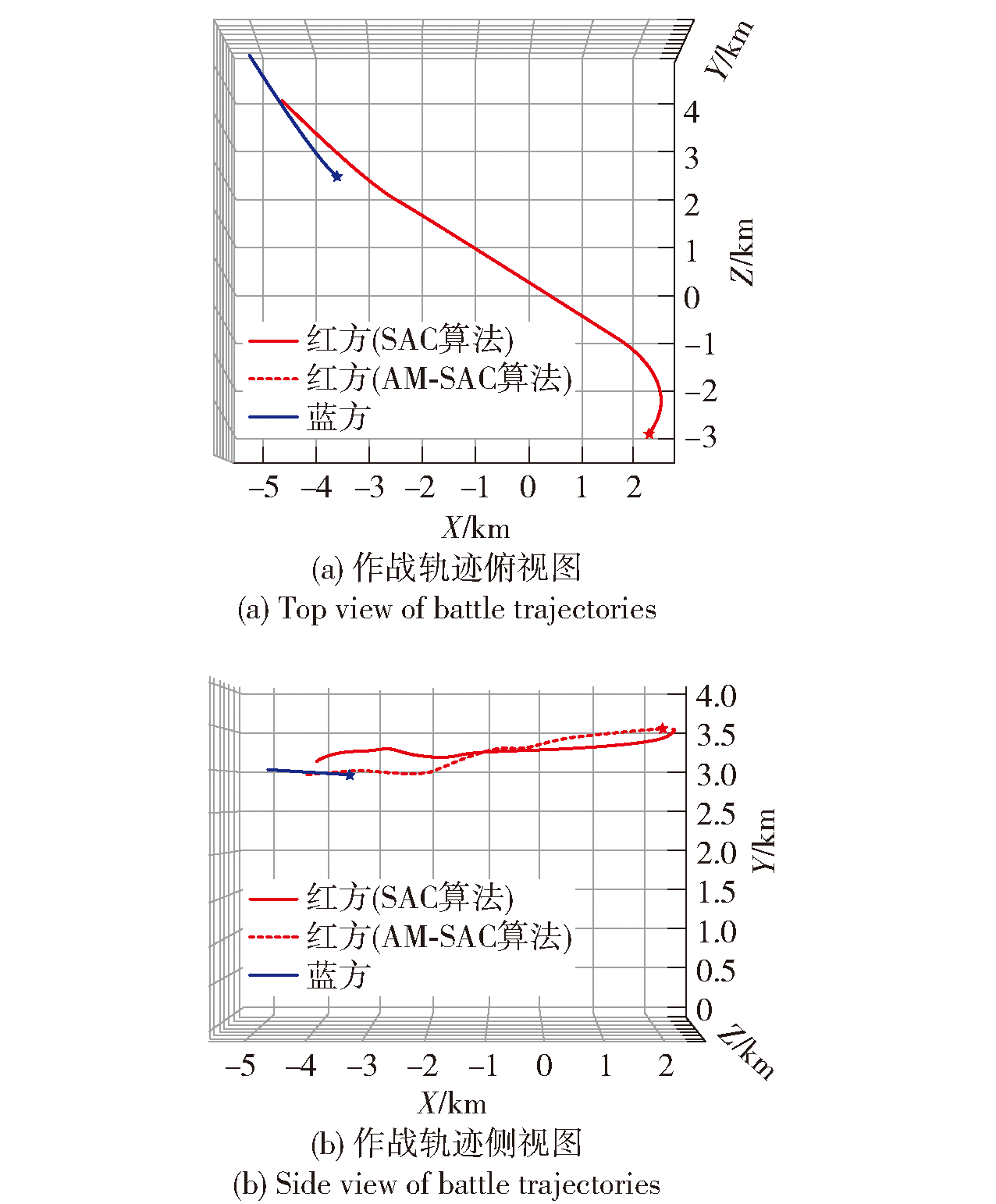
Fig.7 Comparison of battle trajectories
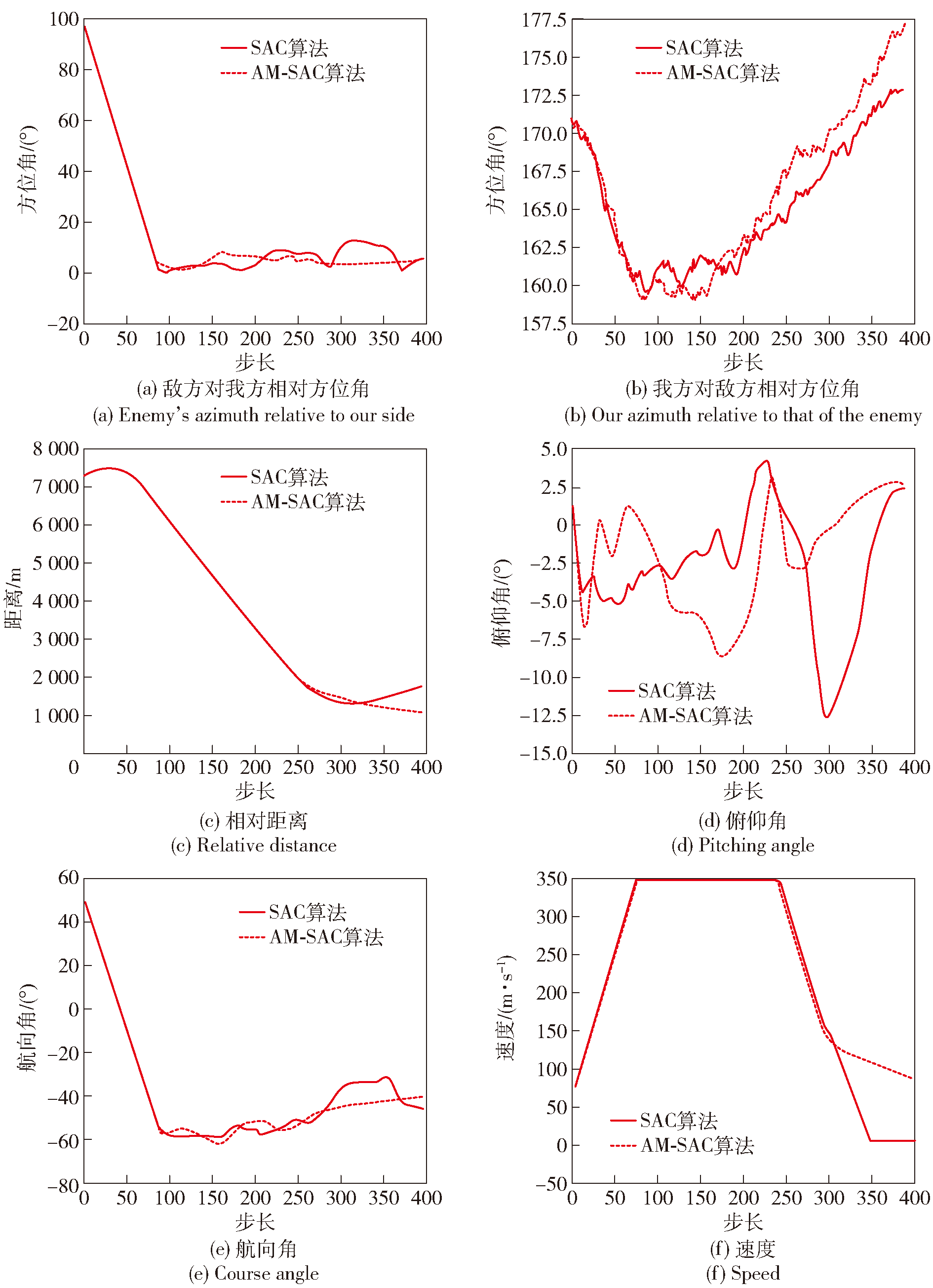
Fig.8 Curves of state changes
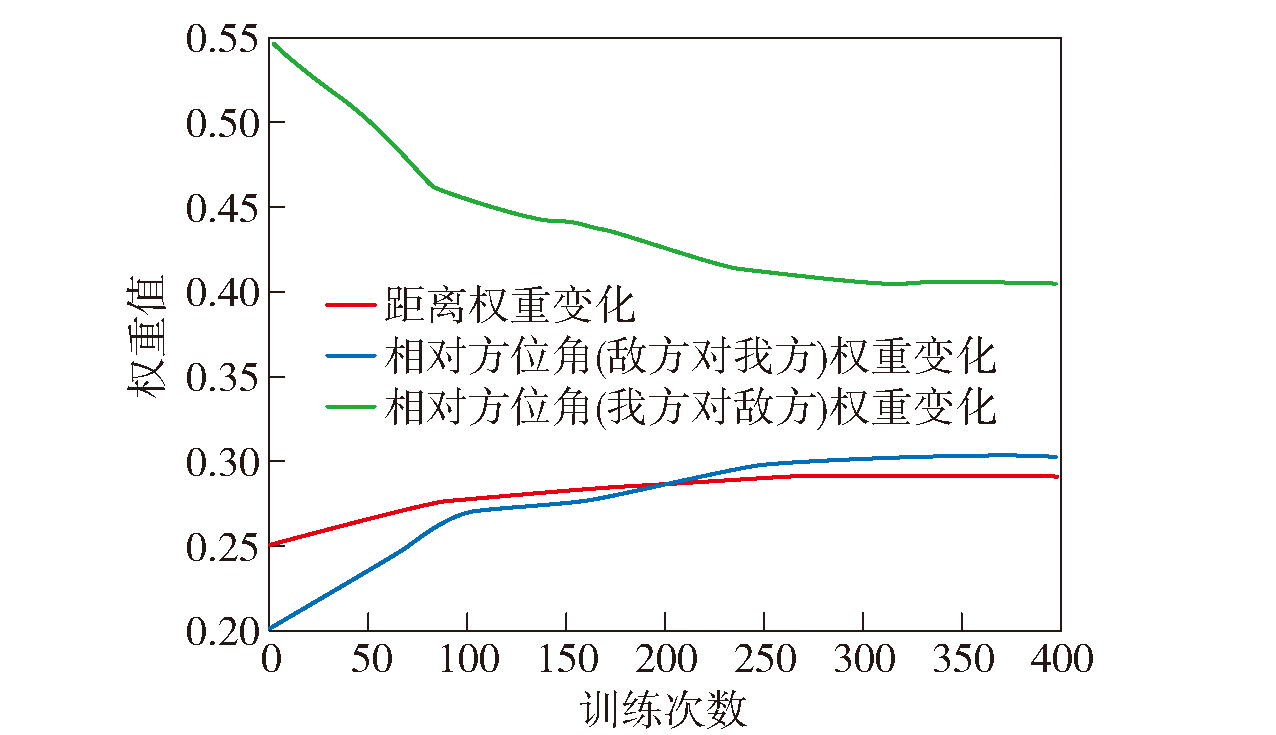
Fig.9 Diagram of weight distribution changes
| 环境 | 敌方对我 方相对方 位角/(°) | 我方对敌 方相对方 位角/(°) | 相对初 始距离/ km | 我方俯 仰角/ (°) | 速度/ (m·s-1) | 敌方 俯仰 角/(°) |
|---|---|---|---|---|---|---|
| 1 | 96.64 | 171.04 | 7.46 | 2 | 70 | 1 |
| 2 | 105.94 | 8.33 | 6.17 | 2 | 70 | 1 |
| 3 | 13.20 | 174.31 | 7.52 | 2 | 70 | 1 |
| 4 | 75.27 | 26.24 | 7.23 | 2 | 70 | 1 |
Table 3 Initial state of multiple environments
| 环境 | 敌方对我 方相对方 位角/(°) | 我方对敌 方相对方 位角/(°) | 相对初 始距离/ km | 我方俯 仰角/ (°) | 速度/ (m·s-1) | 敌方 俯仰 角/(°) |
|---|---|---|---|---|---|---|
| 1 | 96.64 | 171.04 | 7.46 | 2 | 70 | 1 |
| 2 | 105.94 | 8.33 | 6.17 | 2 | 70 | 1 |
| 3 | 13.20 | 174.31 | 7.52 | 2 | 70 | 1 |
| 4 | 75.27 | 26.24 | 7.23 | 2 | 70 | 1 |
| 环境 | 是否作战 成功 | 作战成功 步长 | 最大奖励 | 奖励收敛 回合 |
|---|---|---|---|---|
| 1 | 是 | 236 | 495.06 | 400 |
| 2 | 是 | 137 | 641.37 | 600 |
| 3 | 是 | 214 | 539.01 | 300 |
| 4 | 是 | 151 | 627.08 | 500 |
Table 4 Training results of AM-SAC algorithm
| 环境 | 是否作战 成功 | 作战成功 步长 | 最大奖励 | 奖励收敛 回合 |
|---|---|---|---|---|
| 1 | 是 | 236 | 495.06 | 400 |
| 2 | 是 | 137 | 641.37 | 600 |
| 3 | 是 | 214 | 539.01 | 300 |
| 4 | 是 | 151 | 627.08 | 500 |
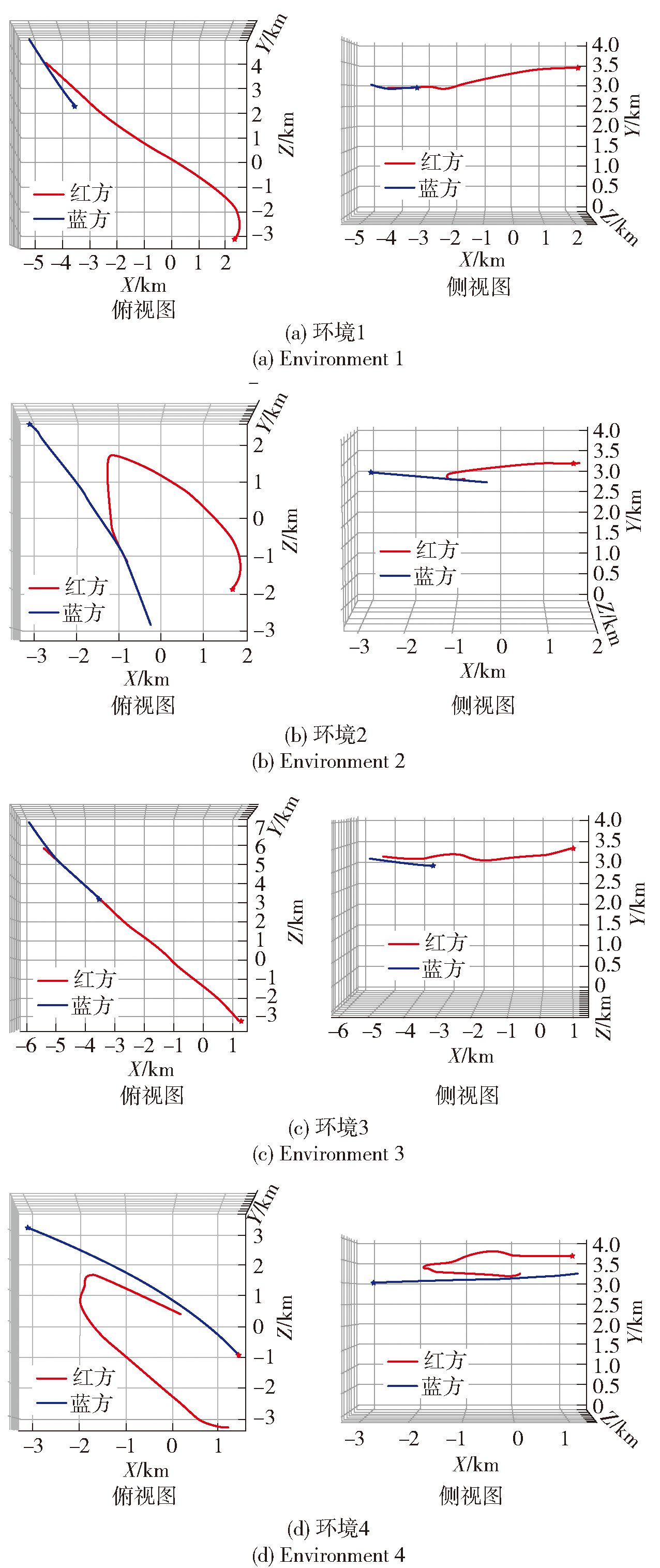
Fig.10 Combat trajectory diagram
| [1] |
韩润海, 陈浩, 刘权, 等. 基于奖励塑造和D3QN的自主空战机动决策研究[C]//2021中国自动化大会论文集. 北京: 中国自动化学会, 2021:687-693.
|
|
|
|
| [2] |
傅莉, 王晓光. 无人战机近距空战微分对策建模研究[J]. 兵工学报, 2012, 33(10):1210-1216.
|
|
|
|
| [3] |
谢剑. 基于微分博弈论的多无人机追逃协同机动技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
|
|
|
|
| [4] |
钱炜祺, 车竞, 何开锋. 基于矩阵博弈的空战决策方法[C]//2014第二届中国指挥控制大会论文集(上). 北京:中国指挥与控制学会, 2014:408-412.
|
|
|
|
| [5] |
徐光达, 吕超, 王光辉, 等. 基于双矩阵对策的UCAV空战自主机动决策研究[J]. 舰船电子工程, 2017, 37(11):24-28,39.
|
|
|
|
| [6] |
|
| [7] |
doi: 10.2514/3.45888 URL |
| [8] |
魏强, 周德云. 基于专家系统的无人战斗机智能决策系统[J]. 火力与指挥控制, 2007(2):5-7, 12.
|
|
|
|
| [9] |
王锐平, 高正红. 无人机空战仿真中基于机动动作库的决策模型[J]. 飞行力学, 2009, 27(6):72-75, 79.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
周德云, 李锋, 蒲小勃, 等. 基于遗传算法的飞机战术飞行动作决策[J]. 西北工业大学学报, 2002, 20(1) :109-112.
|
|
|
|
| [13] |
张涛, 于雷, 周中良, 等. 基于变权重伪并行遗传算法的空战机动决策[J]. 飞行力学, 2012, 30(5):470-474.
|
|
|
|
| [14] |
韩统, 崔明朗, 张伟, 等. 多无人机协同空战机动决策[J]. 兵器装备工程学报, 2020, 41(4):117-123.
|
|
|
|
| [15] |
孙楚, 赵辉, 王渊, 等. 基于强化学习的无人机自主机动决策方法[J]. 火力与指挥控制, 2019, 44(4):142-149.
|
|
|
|
| [16] |
|
| [17] |
马文. 基于深度强化学习的空战博弈决策研究[D]. 成都: 四川大学, 2021.
|
|
|
|
| [18] |
周攀, 黄江涛, 章胜, 等. 基于深度强化学习的智能空战决策与仿真研究[J/OL]. 航空学报:1-16.(2022-01-26)[2022-05-18].
|
|
|
|
| [19] |
张宏鹏, 黄长强, 轩永波, 等. 基于深度神经网络的无人作战飞机自主空战机动决策[J]. 兵工学报, 2020, 41(8):1613-1622.
doi: 10.3969/j.issn.1000-1093.2020.08.016 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.016 |
|
| [20] |
王兴众, 王敏, 罗威. 基于SAC算法的作战仿真推演智能决策技术[J]. 中国舰船研究, 2021, 16(6):99-108.
|
|
|
|
| [21] |
许如晨. 基于深度强化学习的自动驾驶策略研究[D]. 杭州: 浙江大学, 2021.
|
|
|
|
| [22] |
李波, 白双霞, 孟波波, 等. 基于SAC算法的无人机自主空战决策算法[J/OL]. 指挥控制与仿真:1-6.(2022-09-16)[2022-10-17].
|
|
|
|
| [23] |
|
| [1] | SONG Xiaoru, LIU Kang, GAO Song, CHEN Chaobo, YAN Kun. Research on Improved YOLOv5-based Military Target Recognition Algorithm Used in Complex Battlefield Environment [J]. Acta Armamentarii, 2024, 45(3): 934-947. |
| [2] | LÜ Weimin, SUN Chenfeng, REN Likun, ZHAO Jie, LI Yongqiang. A Gas Path Fault Diagnosis Method for Aero-engine Based on TCN-LGBM Model [J]. Acta Armamentarii, 2024, 45(1): 253-263. |
| [3] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [4] | PENG Peiran, REN Shubo, LI Jianan, ZHOU Hongwei, XU Tingfa. Illumination-aware Multispectral Fusion Network for Pedestrian Detection [J]. Acta Armamentarii, 2023, 44(9): 2622-2630. |
| [5] | QIN Haolin, XU Tingfa, LI Jianan. Semi-supervised Hyperspectral Salient Object Detection Using Superpixel Attention and Siamese Structure [J]. Acta Armamentarii, 2023, 44(9): 2639-2649. |
| [6] | WU Liyang, GUO Pengcheng, LIU Chao, LI Wenqiang. Radar Signal Modulation Type Recognition Based on Attention Mechanism Enhanced Residual Networks [J]. Acta Armamentarii, 2023, 44(8): 2310-2318. |
| [7] | LIAN Jing, DING Rongqi, LI Linhui, WANG Xuecheng, ZHOU Yafu. Vehicle Trajectory Prediction Method Based on Graph Models and Attention Mechanism [J]. Acta Armamentarii, 2023, 44(7): 2162-2170. |
| [8] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [9] | CHEN Zihan. Prognosticating Remaining Useful Life of Electro-Mechanical Actuators Using a Multi-mode Transformer Model [J]. Acta Armamentarii, 2023, 44(10): 2920-2931. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||