
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1537-1546.doi: 10.12382/bgxb.2022.0177
Previous Articles Next Articles
LI Chao1,2, WANG Ruixing1,*( ), HUANG Jianzhong1, JIANG Feilong3, WEI Xuemei1, SUN Yanxin1
), HUANG Jianzhong1, JIANG Feilong3, WEI Xuemei1, SUN Yanxin1
Received:2022-03-21
Online:2023-06-30
Contact:
WANG Ruixing
LI Chao, WANG Ruixing, HUANG Jianzhong, JIANG Feilong, WEI Xuemei, SUN Yanxin. Autonomous Decision-making and Intelligent Collaboration of UAV Swarms Based on Reinforcement Learning with Sparse Rewards[J]. Acta Armamentarii, 2023, 44(6): 1537-1546.
Add to citation manager EndNote|Ris|BibTeX
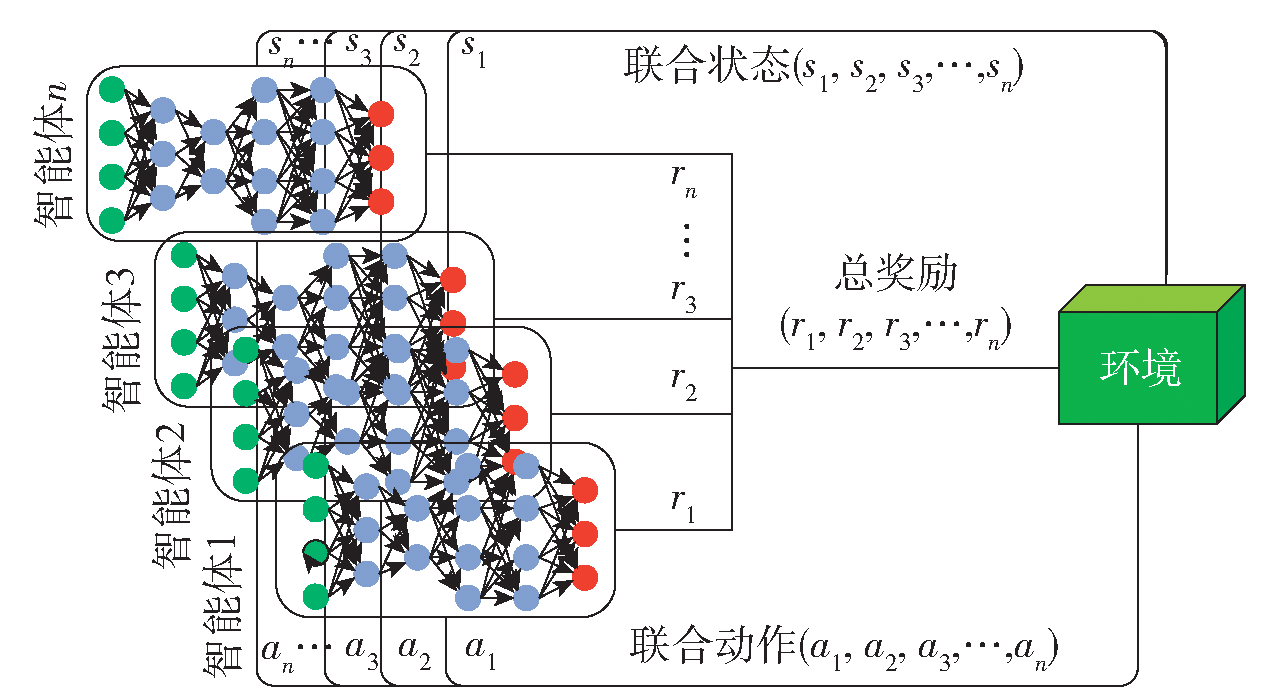
Fig.1 Schematic diagram of multi-agent reinforcement learning

Fig.2 Composition of the UAV swarm confrontation model

Fig.3 Initial site map of attack-defense confrontation simulation model of the red and blue UAV swarms

Fig.4 Schematic diagram of the autonomous decision-making principle for the redintelligent units

Fig.5 Schematic diagram of the game confrontation strategy of the blueintelligent units

Fig.6 Reward engineering setting based on local reward reshaping in UAV swarm attack-defense confrontation scenarios

Fig.7 Reward sparsity under the local reward reshaping

Fig.8 Framework for autonomous decision-making and intelligent collaboration strategy learning method for UAV swarm confrontation based on local reward reshaping and prioritized experience replay

Fig.9 Efficiency comparison for attack-defense confrontation algorithms of UAV swarms
| 算法 | 算法效果 | 性能提升 |
|---|---|---|
| DQN +局部回报重塑算法 | 训练2000代,策略收敛,胜率约80%。 | |
| Double DQN+局部回报重塑算法 | 训练1500代,策略收敛,胜率约80%。 | 提升25% |
| Double DQN+局部回报重塑+PER算法 | 训练700代,策略收敛,胜率约80%。 | 提升65% |
Table 1 Efficiency comparison forattack-defense confrontation algorithms of UAV swarms
| 算法 | 算法效果 | 性能提升 |
|---|---|---|
| DQN +局部回报重塑算法 | 训练2000代,策略收敛,胜率约80%。 | |
| Double DQN+局部回报重塑算法 | 训练1500代,策略收敛,胜率约80%。 | 提升25% |
| Double DQN+局部回报重塑+PER算法 | 训练700代,策略收敛,胜率约80%。 | 提升65% |

Fig.10 Situation forattack-defense confrontation simulation of red and blue UVA swarms

Fig.11 Demonstration panel for attack-defense confrontation scenario of UVA swarms
| [1] |
王莉. 人工智能在军事领域的渗透与应用思考[J]. 科技导报, 2017, 35(15):15-19.
|
|
|
|
| [2] |
罗德林, 徐扬, 张金鹏. 无人机集群对抗技术新进展[J]. 科技导报, 2017, 35(7): 26-31.
|
|
|
|
| [3] |
梁晓龙, 侯岳奇, 胡利平, 等. 无人集群试验评估研究现状分析及理论方法[J]. 南京航空航天大学学报, 2020, 52(6): 846-854.
|
|
|
|
| [4] |
朱建文, 赵长见, 李小平, 等. 基于强化学习的集群多目标分配与智能决策方法[J]. 兵工学报, 2021, 42(9): 2040-2048.
|
|
doi: 10.3969/j.issn.1000-1093.2021.09.025 |
|
| [5] |
杜威, 丁世飞. 多智能体强化学习综述[J]. 计算机科学, 2019, 46(8):1-8.
doi: 10.11896/j.issn.1002-137X.2019.08.001 |
|
doi: 10.11896/j.issn.1002-137X.2019.08.001 |
|
| [6] |
郭宪, 方勇纯. 深入浅出强化学习[M]. 北京: 电子工业出版社, 2018:1-10.
|
|
|
|
| [7] |
陈智超. 基于深度强化学习的无人潜航器智能对抗决策[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [8] |
doi: 10.1109/TNSRE.2017.2700395 pmid: 28475063 |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
杨瑞, 严江鹏, 李秀. 强化学习稀疏奖励算法研究——理论与实验[J]. 智能系统学报, 2020, 15(5): 888-899.
|
|
|
|
| [14] |
方嘉良. 基于强化学习的稀疏奖励问题研究[D]. 北京: 中国地质大学, 2020:29-39.
|
|
|
|
| [15] |
杨惟轶, 白辰甲, 蔡超, 等. 深度强化学习中稀疏奖励问题研究综述[J]. 计算机科学, 2020, 47(3):182-191.
doi: 10.11896/jsjkx.190200352 |
|
|
|
| [16] |
王瑞星. 含有稀疏奖励的异构多智能体强化学习对抗方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021.
|
|
|
|
| [17] |
王瑞星, 董诗音, 江飞龙, 等. 稀疏奖励下基于强化学习的异构多智能体对抗[J]. 信息技术, 2021(5):12-20.
|
|
|
|
| [18] |
李理, 李旭光, 郭凯杰, 等. 国产化环境下基于强化学习的地空协同作战仿真[J]. 兵工学报, 2022, 43(增刊1): 74-81.
|
|
doi: 10.12382/bgxb.2022.A005 |
|
| [19] |
|
| [20] |
doi: 10.1109/TITS.2020.3042670 URL |
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [1] | CAO Zijian, SUN Zelong, YAN Guochuang, FU Yanfang, YANG Bo, LI Qinjie, LEI Kailin, GAO Linghang. Simulation of Reinforcement Learning-based UAV Swarm Adversarial Strategy Deduction [J]. Acta Armamentarii, 2023, 44(S2): 126-134. |
| [2] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [3] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [4] | ZHANG Jiandong, WANG Dinghan, YANG Qiming, SHI Guoqing, LU Yi, ZHANG Yaozhong. Multi-Dimensional Decision-Making for UAV Air Combat Based on Hierarchical Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(6): 1547-1563. |
| [5] | ZHENG Zexin, LI Wei, ZOU Kun, LI Yanfu. Anti-jamming Waveform Design of Ground-based Air Surveillance Radar Based on Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(5): 1422-1430. |
| [6] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [7] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [8] | ZHAO Wenfei, CHEN Jian, WANG Yan, TENG Kenan. Dynamic Firepower Allocation for Cooperative Air Defense of Strategic Locations on the Sea Based on Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(11): 3516-3528. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||